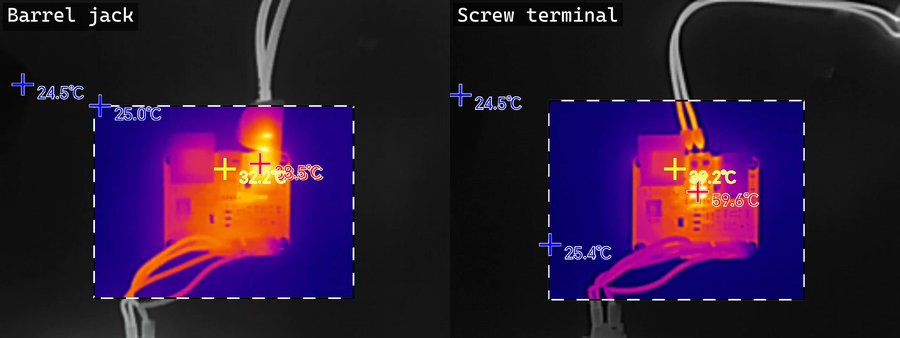
負荷下での Waveshare シリアルバスサーボ駆動基板の試験
2枚の Waveshare シリアルバスサーボ駆動基板を、4つのシナリオ(2 A / 10 分、5 A / 5 分、7 A / 2 分、10 A / 30 秒)・12 V で実測した熱負荷試験。バレル...
Boris Kotov
03 May 2026
2枚の Waveshare シリアルバスサーボ駆動基板を、4つのシナリオ(2 A / 10 分、5 A / 5 分、7 A / 2 分、10 A / 30 秒)・12 V で実測した熱負荷試験。バレル...
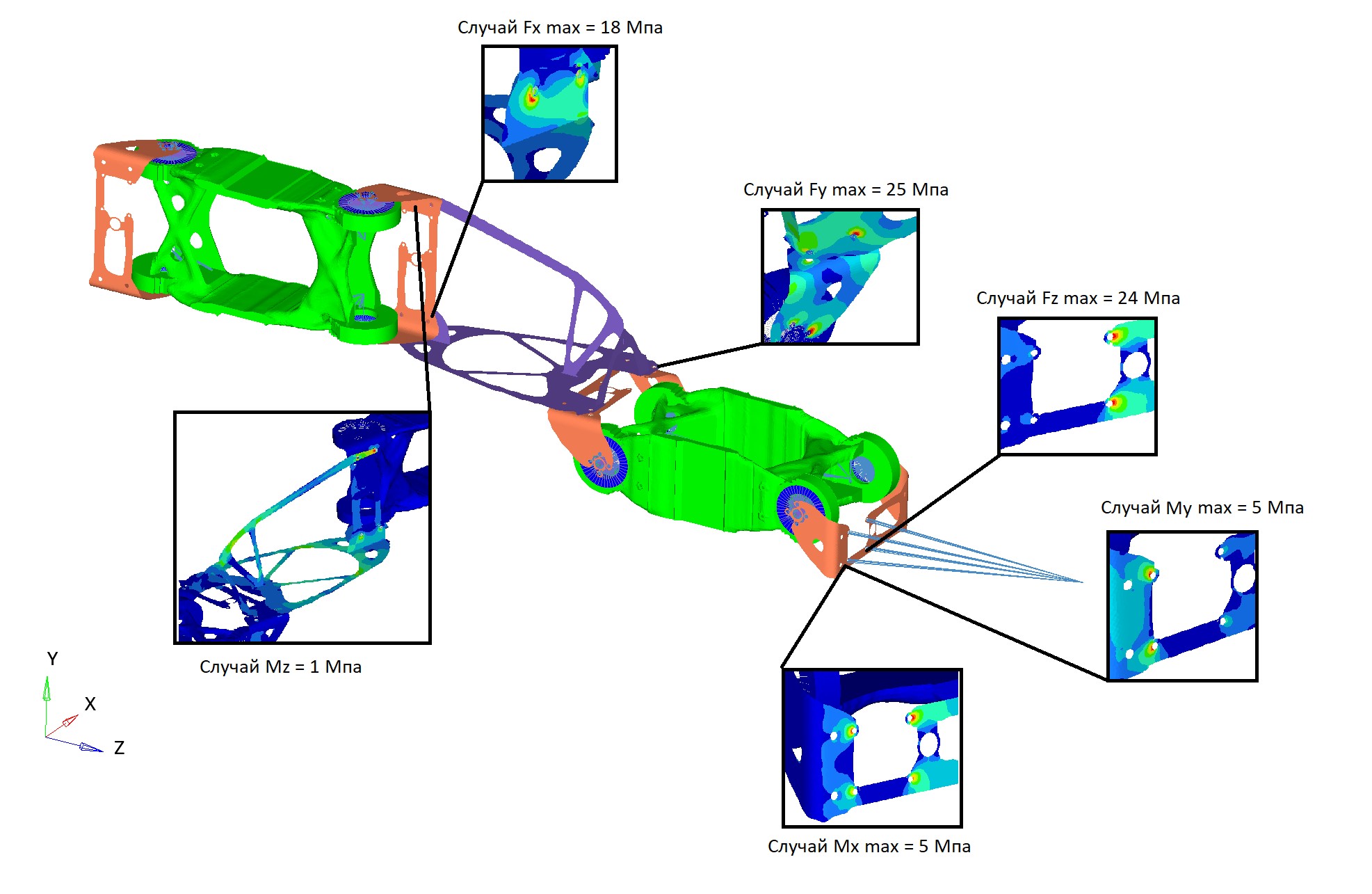
本研究では、質量制約を維持しつつ構造剛性を高めるために、SIMP アルゴリズムを用いたロボットマニピュレータのトポロジー最適化を紹介します。有限要素解析とアルミ・鋼製ブラケットの反復最適化により、剛性...

Feetech STS3250 シリアルバスサーボモーターの包括的な実測評価。試験では定格速度からの偏差 2〜3%、優れた位置再現性(±0.02 mm)、0.5° 仕様内の機械的バックラッシュを確認。...

Feetech STS3215 サーボの実性能、精度、制御挙動を詳しく検証します。この手頃で多機能なサーボが実際の負荷・速度・精度試験でどう動作するかを分析し、ロボティクスやモーション制御設計に役立つ...
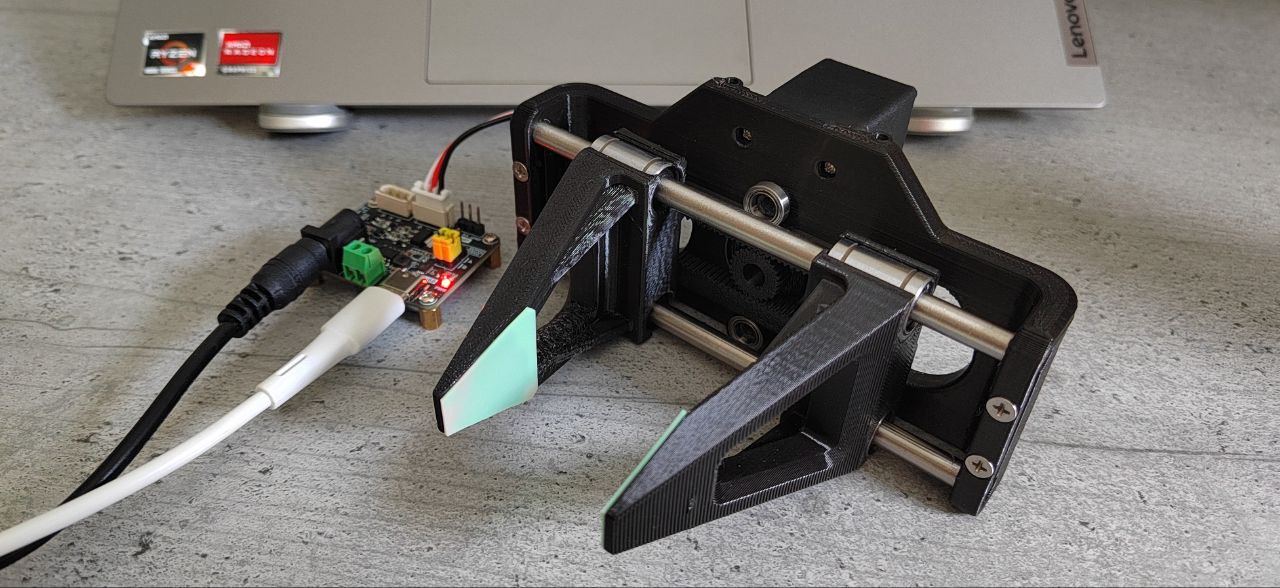
グリッパーとは、物体をつかむ・保持する・操作する・運搬するために設計された機械的またはロボット的な装置です。ロボットアームや自動化システムの「手」、すなわちエンドエフェクタとして機能し、物体をつかんで...
ロボットマニピュレータで最も重要な部品である電動モーターをどのように選定したかをお話しします。
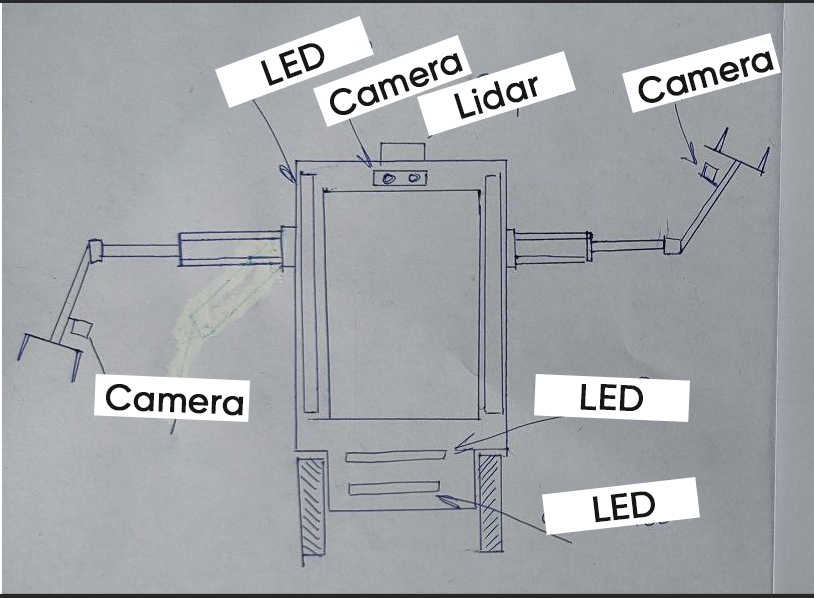
5月、私たちは Robo 9 デザインの最初のバリエーションを完成させ、初期コンセプトから最終構造までの進化を示しました。マットブラックのフレーム、2本のマニピュレータ、バランス機構、そして LiDA...
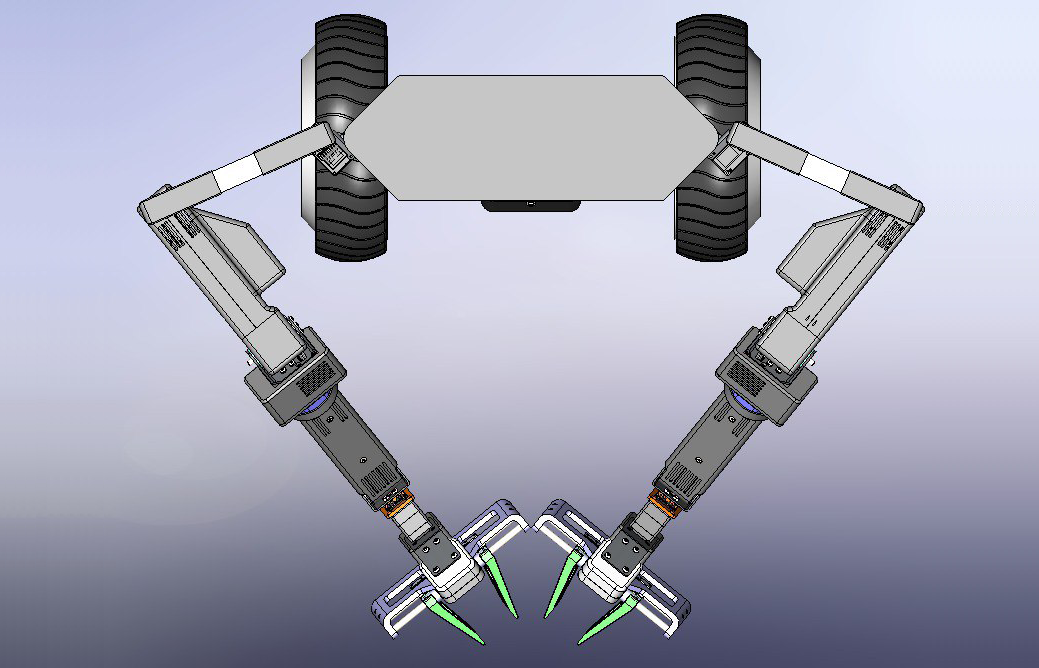
この2か月で、研究用ロボット Robo 9 の開発を進め、構造と2本のマニピュレータを完成させました。軽量な平行グリッパーと Feetech モーターを用いたセミガントリー設計により、リーチ 650 ...
ALOHA 2 はその常識を覆します。単なる研究プロジェクトではなく、ロボティクスの民主化に向けた大胆な一歩です。オープンなハードウェア設計、モジュール式コンポーネント、そして高価な専用システムに匹敵...
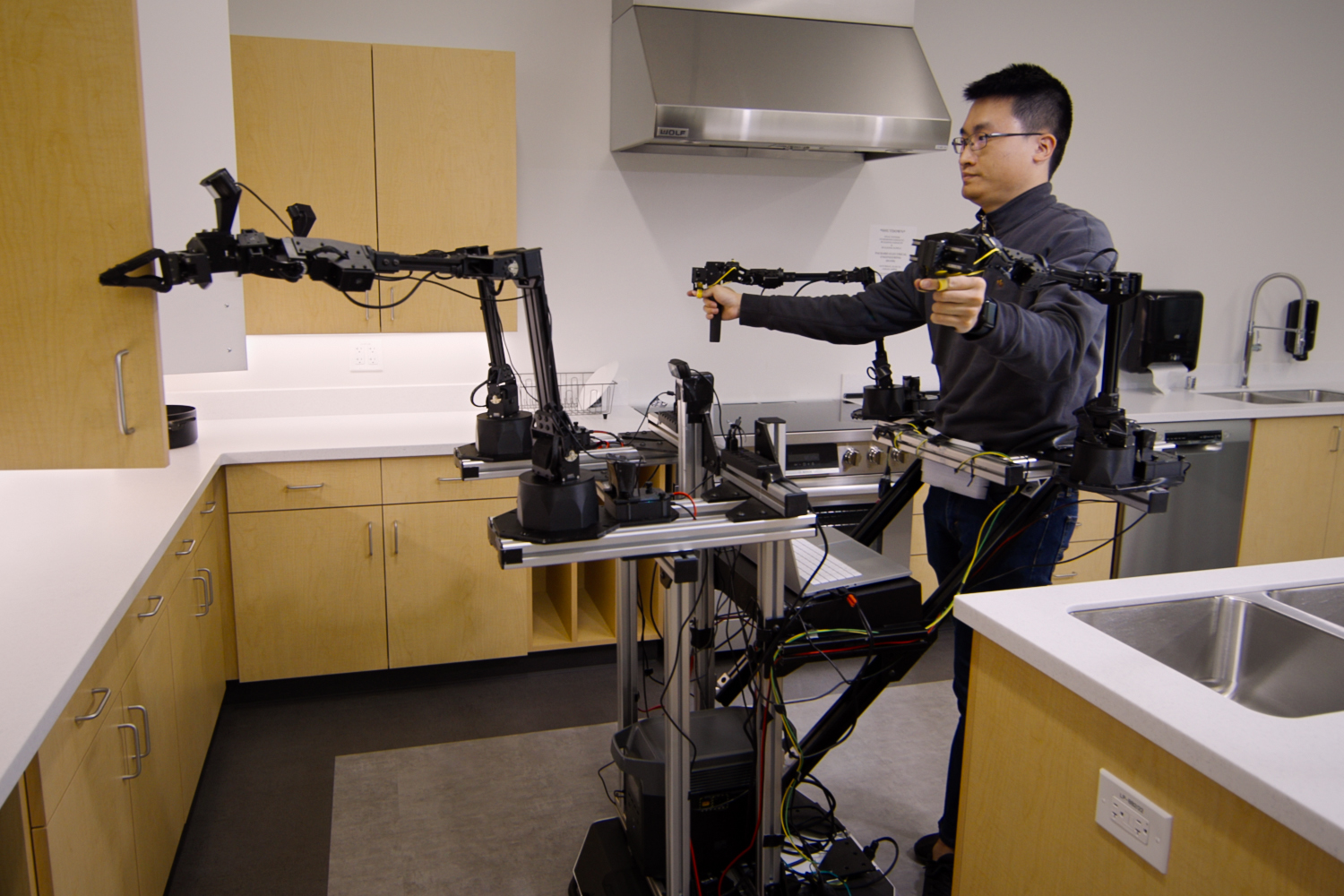
Mobile ALOHA プロジェクトは、スタンフォード大学のチームが Boston Dynamics AI Institute と協力して開発したもので、ロボティクスにおける大きな飛躍を示します。低...
プライバシーを大切にしています
当サイトは、閲覧体験の向上、パーソナライズされた広告やコンテンツの提供、トラフィック分析のために Cookie を使用します。すべて同意する、必須でない Cookie を拒否する、または許可する Cookie を選ぶことができます。 プライバシーポリシー
Cookie 設定の管理
サイトの動作に必要で、無効にできません。
訪問者のサイト利用状況の把握に役立ちます。
関連性の高い広告の配信と効果測定に使用します。
拡張機能とパーソナライズを有効にします。