モバイルロボットのコンセプトデザイン開発
 3452
3452
5月、私たちはロボット全体デザインの最初のバリエーションを完成させました。何から始め、最終的に何ができあがったのかを、順を追ってご紹介したいと思います。
当初の要件
- 構造の技術仕様を考慮した3Dデザインのコンセプトを作成する必要があります。
- モデルは環境内で、すなわち屋内で、VRヘッドセット Oculus Quest 3 を使う人の操作のもとで提示される必要があります。
- ソースファイルを提供する必要があります。
当初のコンセプト。デザインは当社のエンジニアが提供
外観パラメータ
- マットブラックの色。代替のカラースキームも検討可能です。すなわち白、黄色です。
- フレーム寸法: 350 mm から 400 mm ×(車輪の高さを含めて 1300 mm – 1400 mm)。
- 動作形態は Segway のようなものです。
- 上部のП字型フレームを前面と背面から見た外観は同一であるべきです。
- 上部フレームには深度カメラと LiDAR を設置する必要があります。
- 側面のフレームには LED ストリップを設置する必要があります。
- LED ストリップは下部プラットフォームにも設置する必要があります。
- マニピュレータには Intel RealSense D405 に類似した深度カメラを取り付ける必要があります。
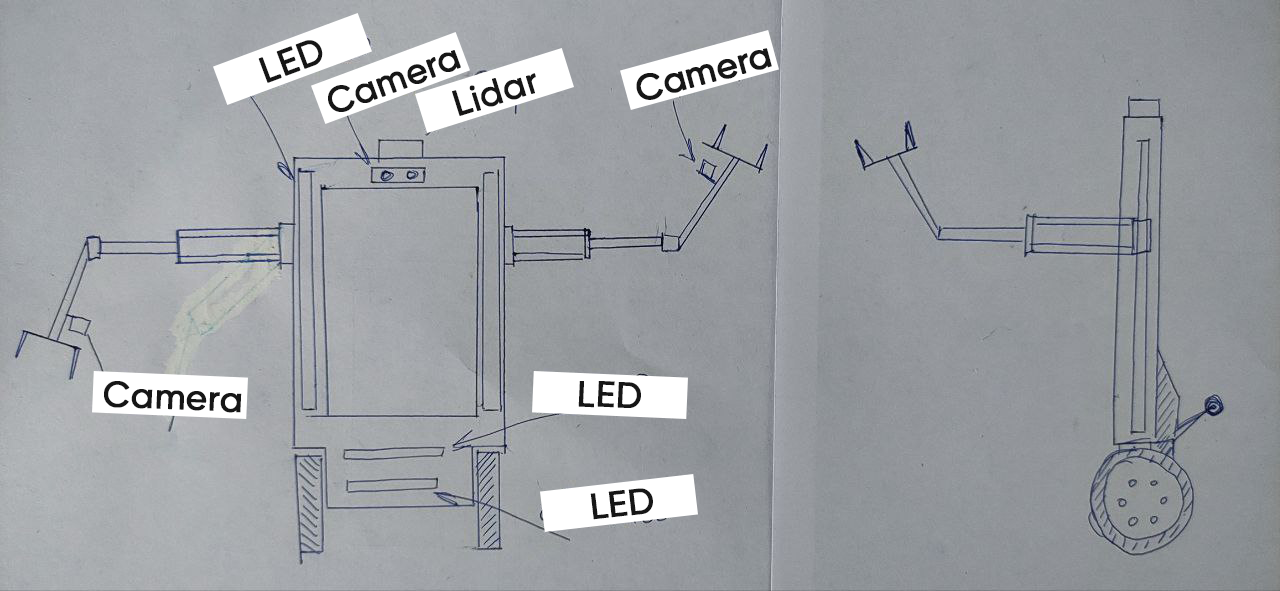
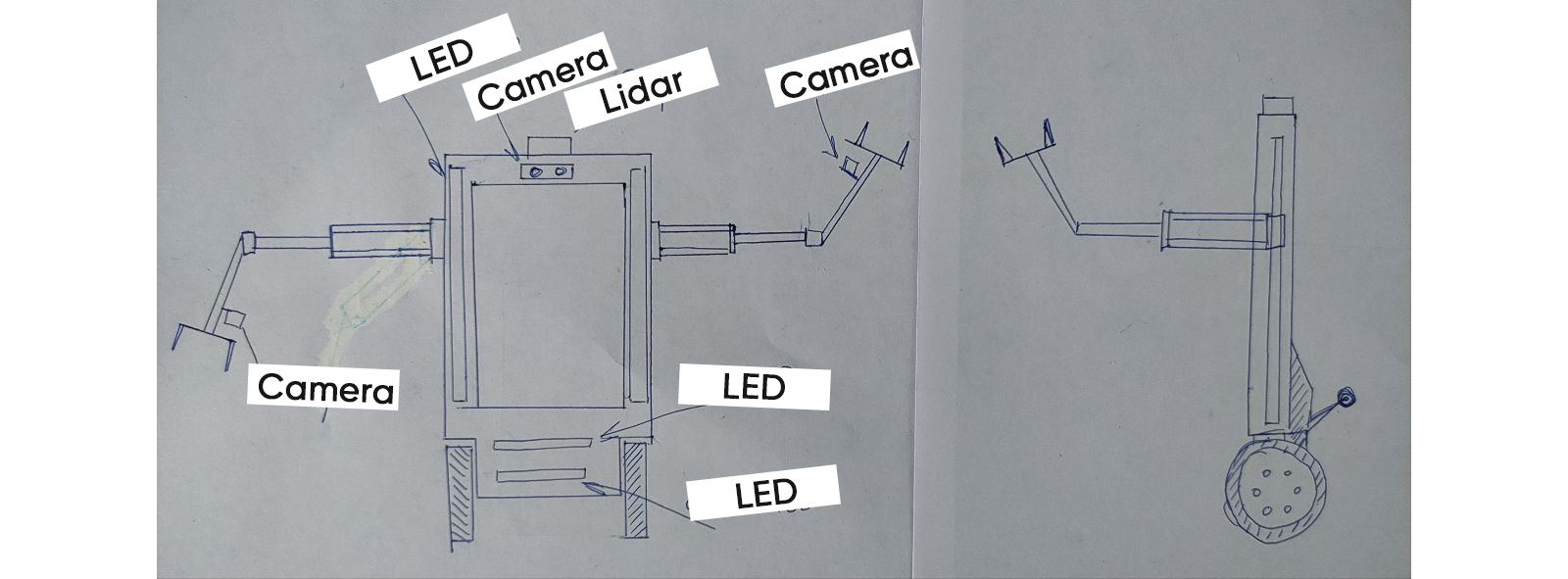
スケッチはセンサーの配置を示しています
バランス機構
テールは常に下がった位置にあり、文字Пに似たまっすぐな形状で、両端にそれぞれローラーが付きます。ローラーは非駆動です。
バランス機構。下降位置。側面図
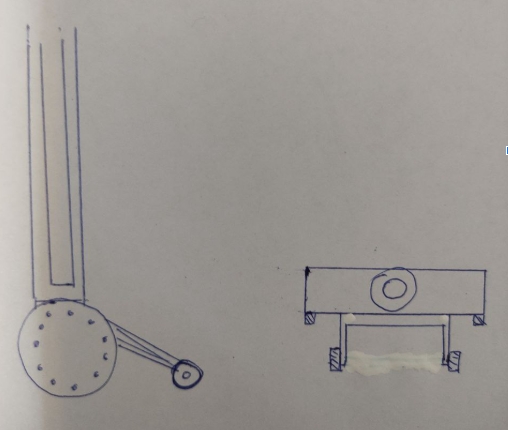
バランス機構
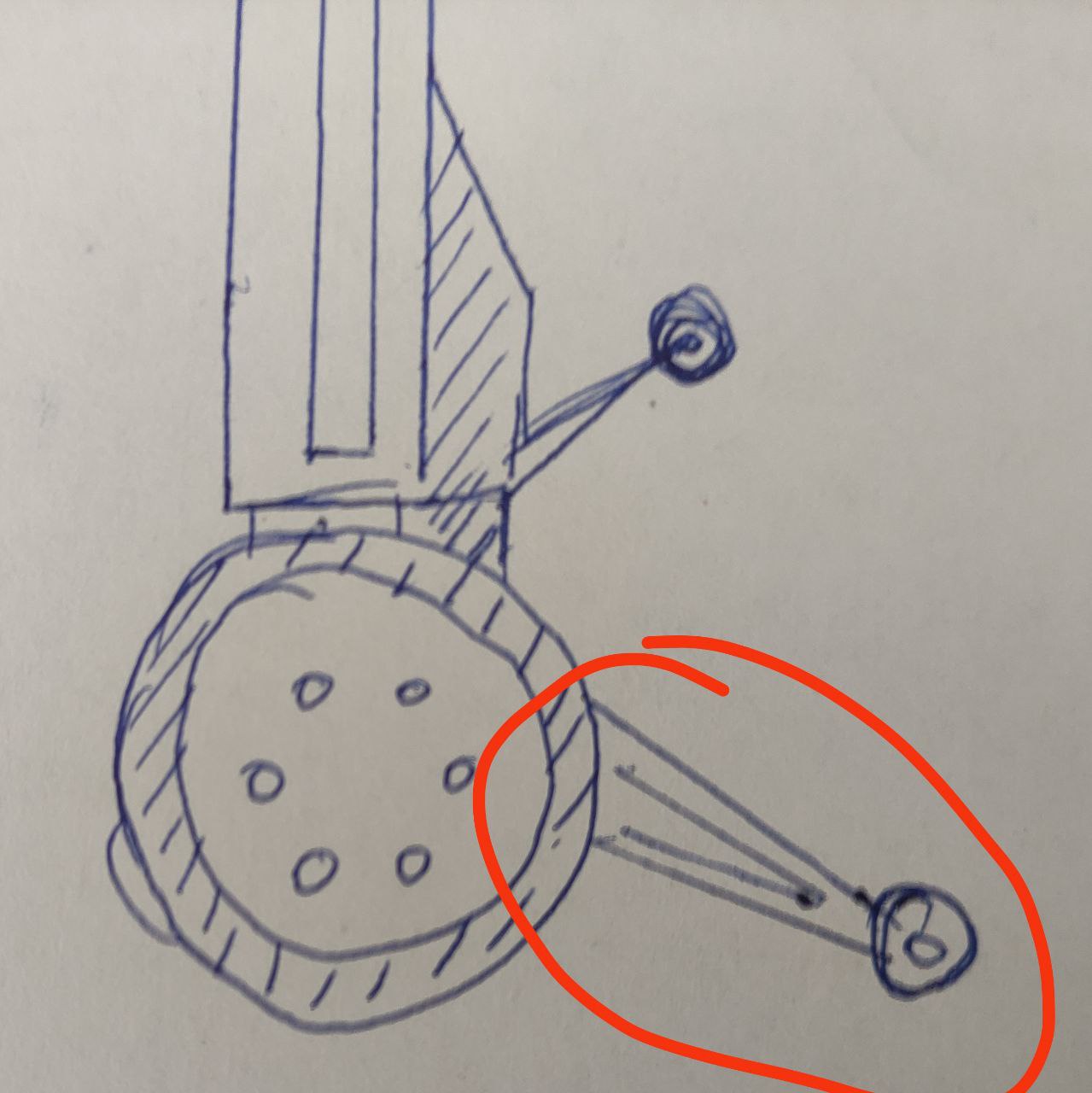
車輪
画像のような旋回式キャスター: 3インチの小型産業用キャスター

ロボットの後輪
マニピュレータ
- マニピュレータは支柱の全高まで伸びます。
- 高さ 1300 mm
- 長さ 650 mm
- 第2関節の突起部は調整が必要です。構造をどのように取り除くか、または内側へずらすかはエンジニアが判断します。
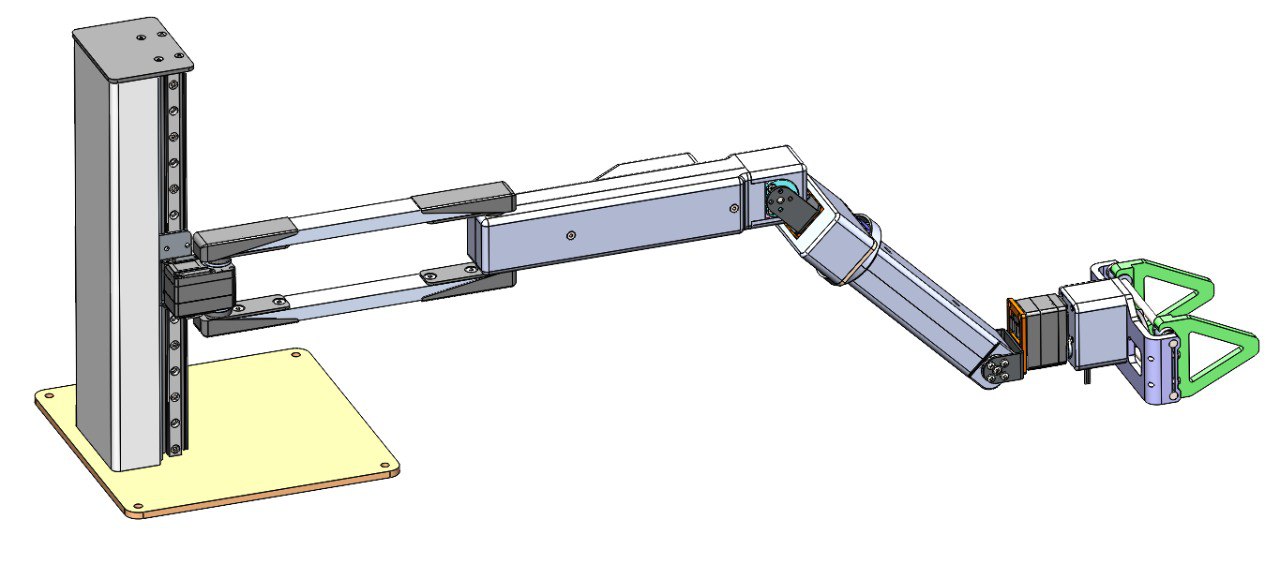
ロボットアーム
グリッパーの設計
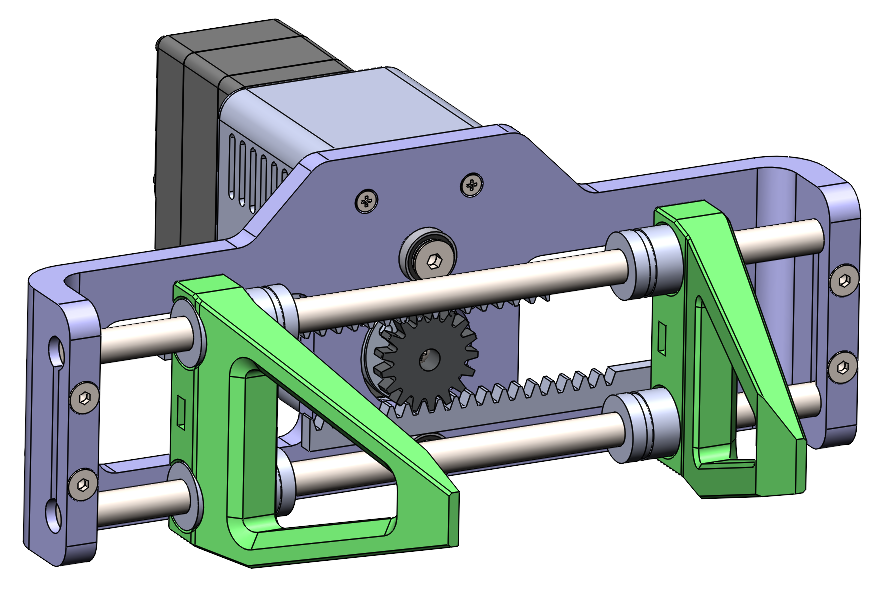
平行グリッパーの設計
マニピュレータ支柱の配置
- 最大のリーチを確保するため、支柱は45度の角度に回す必要があります。
メインフレーム支柱の角度
このような支柱の角度位置の狙いは、マニピュレータにできるだけ多くの作業空間を確保することです。
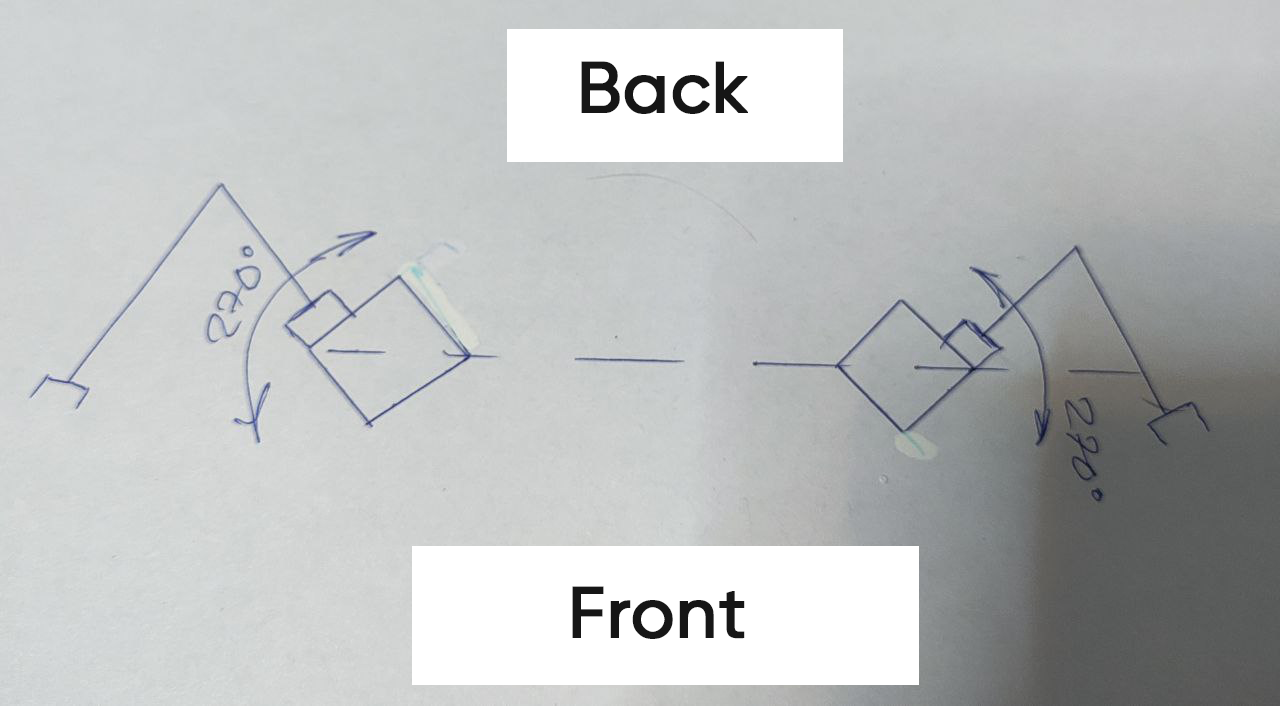
上部センサー
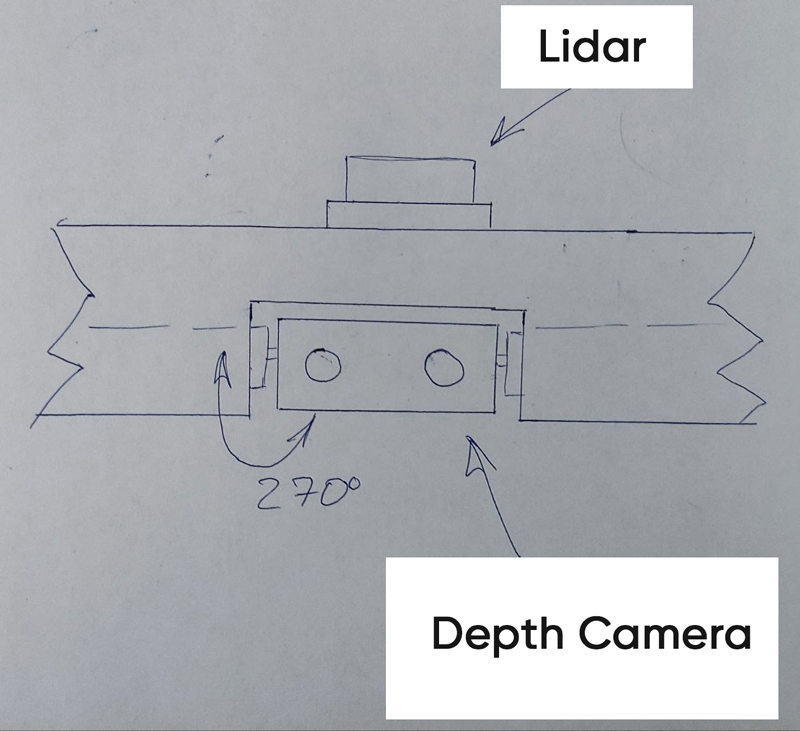
上部センサー
- 深度カメラは前後に回転できるようにする必要があります。
- 当初は3D LiDAR を使うつもりだったので、上部に1台配置しました。
下部車輪のモーター
- サイズ: 8.5インチ
- 電動キックスクーター用の8.5インチ車輪

前部のインホイールモーター
ロボットのメインフレームの最初のバージョン

ロボットのメインフレームの最初のバージョン。前面図

ロボットのメインフレームの最初のバージョン。側面図

ロボットのメインフレームの最初のバージョン。背面図
このバージョンでは:
- 適応型テールの代わりに重い後部を採用することにしました。当初は水タンクを使うつもりでした。アームを最大荷重で伸ばしたときの前方への転倒モーメントを打ち消すには約20 kgのカウンターウェイトが必要だからです。
- デザイナーは、ロボットを遠くからでも視認できるようにオレンジ色を使いました。
ロボットのメインフレームの最初のバージョン

ロボットのメインフレームの第2バージョン。前面図

ロボットのメインフレームの第2バージョン。前面図
変更点
- 黒色に変更しました。高強度のエンジニアリングプラスチックはほとんどが黒色だからです。
- 将来のユーザーが上に何かを置けるよう、後部を平らな面にすることにしました。
- 水タンクの代わりに、前方への転倒モーメントを打ち消すのに使える大容量バッテリーを見つけました。
- デザイナーは、移動ベースに前部ライトを、フレーム上部に LiDAR と深度カメラを追加しました。
コンセプトデザインの最新バージョン。ただし最終版ではありません…

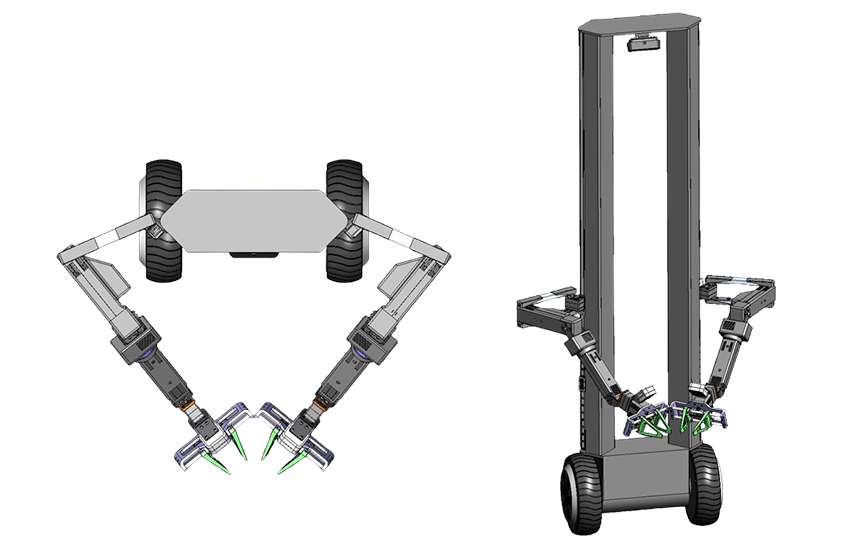
ロボット V0 のデザインコンセプト。前面図

ロボット V0 のデザインコンセプト。背面図
- デザイナーはマニピュレータを2本追加しました。
- 後部ライト。
- 想定外の暴走を防ぐための停止ボタン。次の話題になった動画のように:
https://youtu.be/1eYZr9vdGl8?si=-7L6Zf6fB64xzQUC - 2台目の LiDAR
備考
最終デザインは現在のものとは異なります。
- 現在、デュアルサーボ構成を用いてモーターのバックラッシュを補正する取り組みを進めています。そのため、最終的なアームは別の設計になる見込みです。
- 3D LiDAR の代わりに、おそらく 2D・1D LiDAR や超音波距離センサーといったセンサーの組み合わせを使うことになるでしょう。
コメントするにはログインしてください。