Разработка концепт-дизайна мобильного робота
 3455
3455
В мае мы завершили первый вариант полного дизайна робота. Хочу пошагово показать, с чего мы начали и что в итоге получилось.
Исходные требования
- Нужно создать концепт 3D-дизайна с учётом технических характеристик конструкции.
- Модель должна быть показана в среде — в помещении, под управлением человека в VR-гарнитуре Oculus Quest 3.
- Должны быть предоставлены исходные файлы.
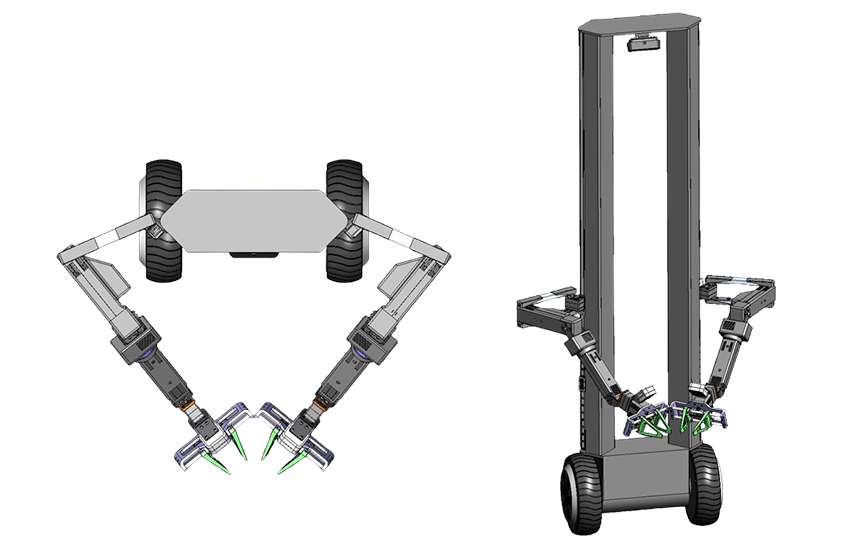
Исходный концепт. Дизайн предоставлен нашим инженером
Внешние параметры
- Матовый чёрный цвет. Возможны альтернативные цветовые схемы: белый, жёлтый.
- Размеры рамы: от 350 до 400 мм × (1300–1400 мм с учётом высоты колёс).
- Формат работы — как у Segway.
- Вид верхней П-образной рамы спереди и сзади должен быть идентичным.
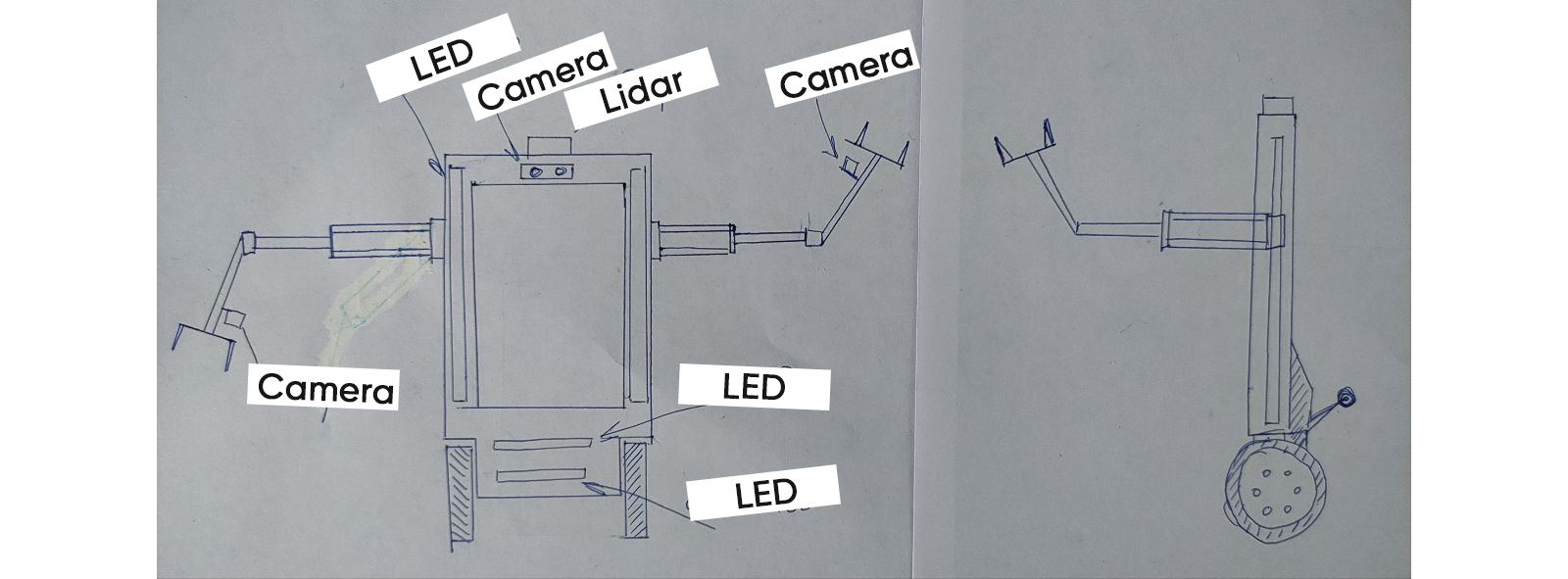
- На верхней раме должны быть установлены камера глубины и LiDAR.
- На боковых рамах должны быть установлены светодиодные ленты.
- Светодиодные ленты также должны быть установлены на нижней платформе.
- На манипуляторах должны быть установлены камеры глубины, аналогичные Intel RealSense D405.
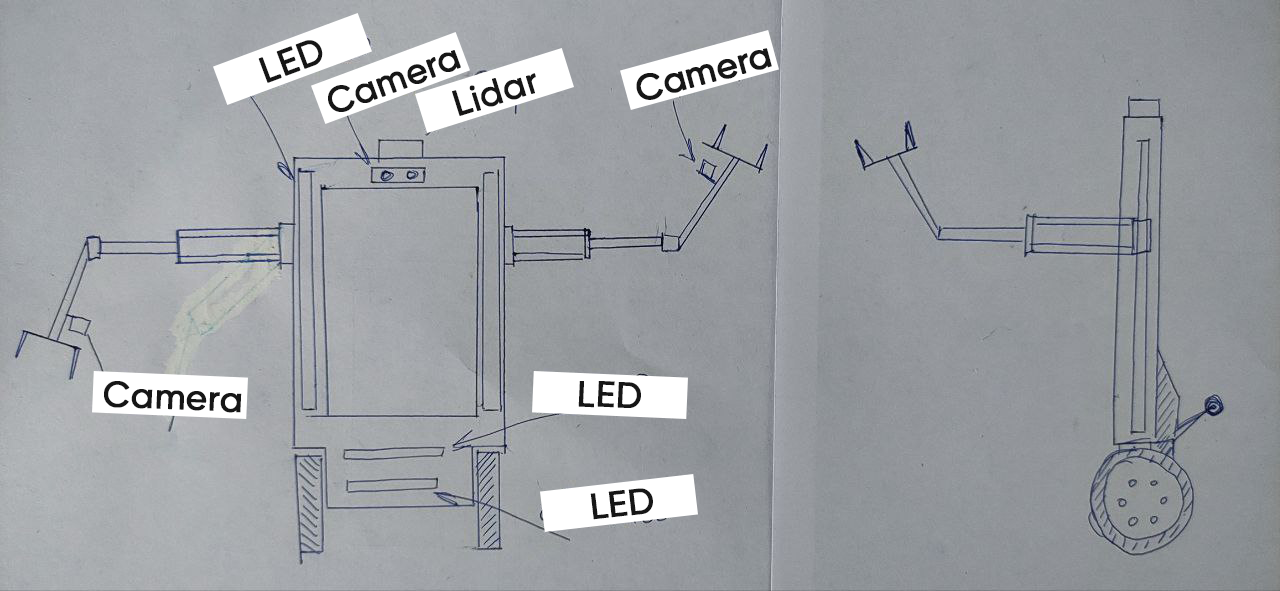
Эскиз показывает расположение датчиков
Механизм балансировки
Хвост всё время будет находиться в опущенном положении и иметь прямую форму, напоминающую букву П, с роликом на каждом конце. Ролики неприводные.
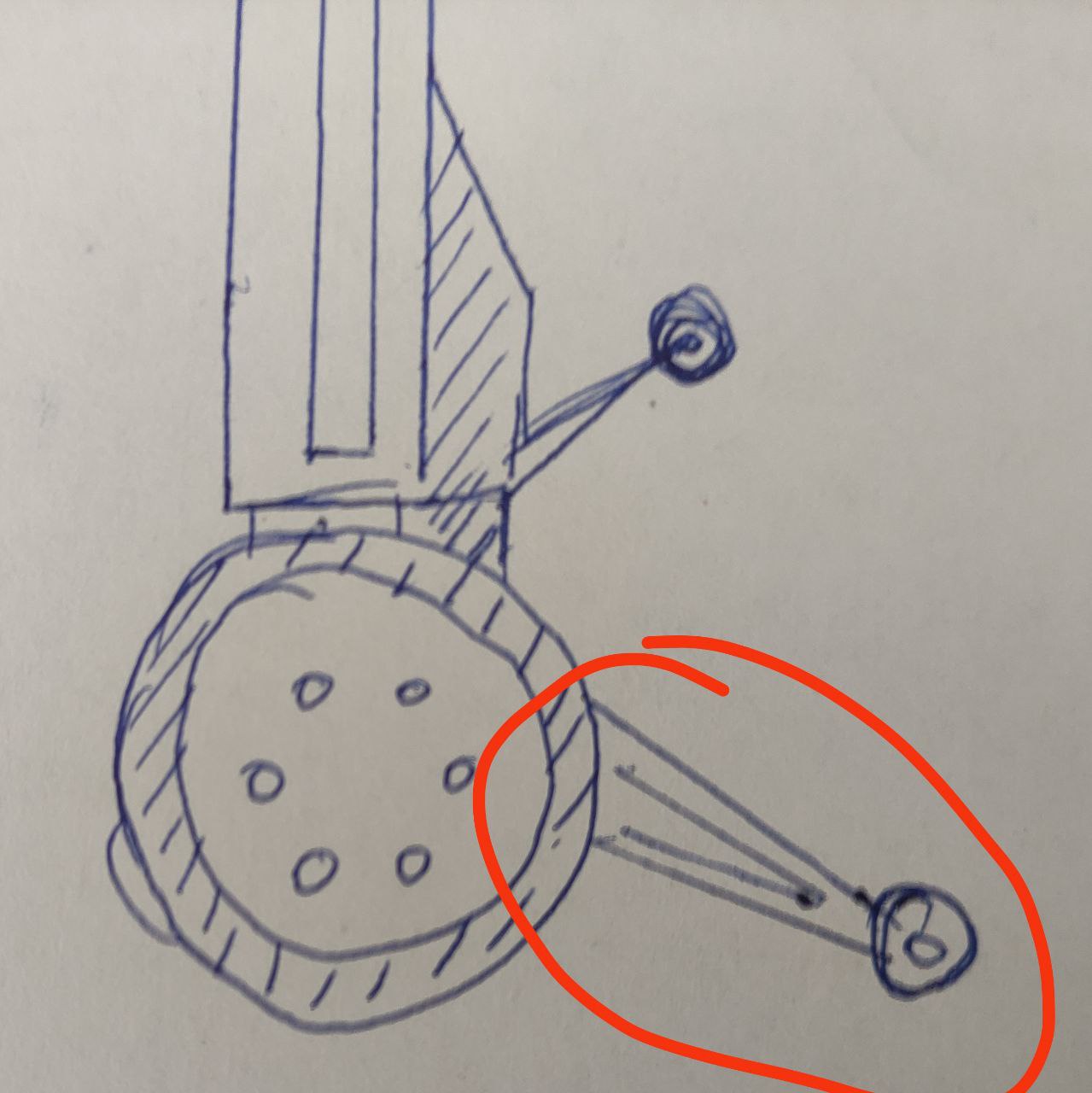
Механизм балансировки. Нижнее положение. Вид сбоку
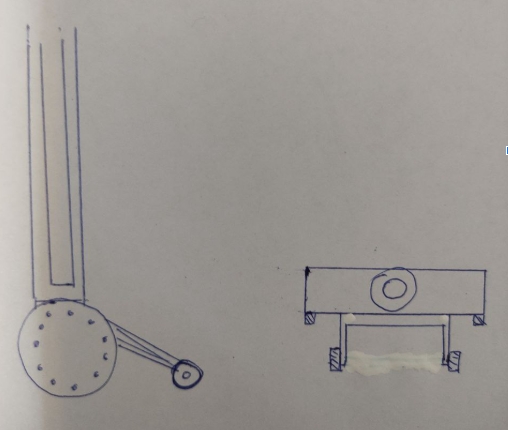
Механизм балансировки
Колёса
Поворотные колёса, как на изображении: 3-дюймовые малые промышленные ролики

Задние колёса робота
Манипуляторы
- Манипуляторы вытягиваются на полную высоту стойки.
- Высота — 1300 мм
- Длина — 650 мм
- Выступ на втором сочленении нужно доработать; инженер определит, как убрать или сместить конструкцию внутрь.
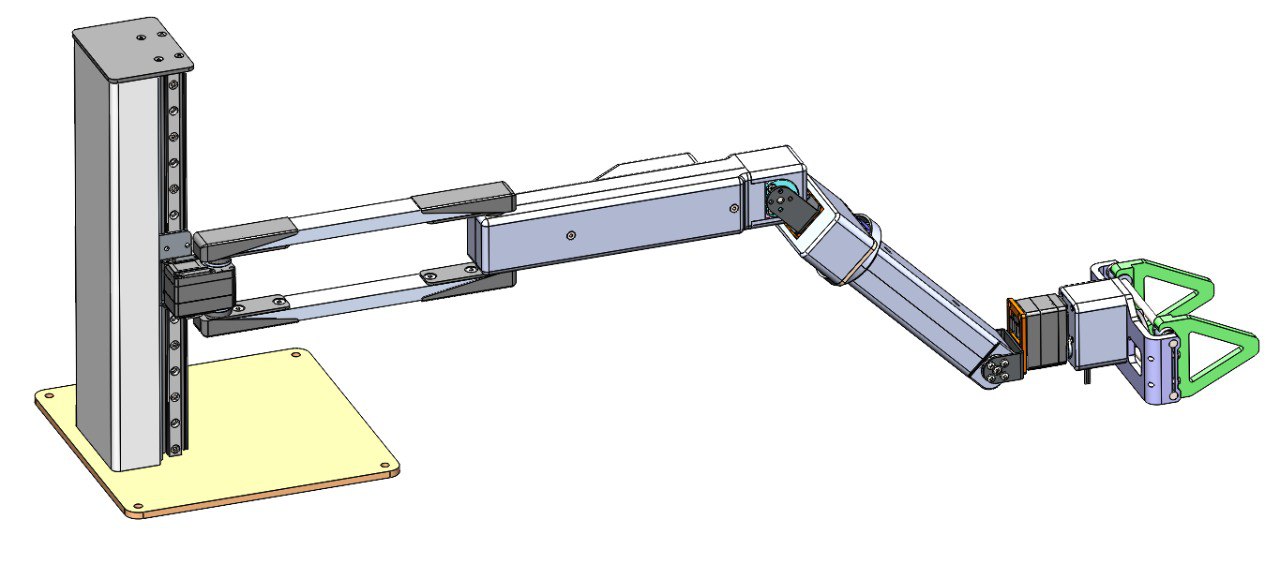
Манипулятор робота
Конструкция захвата
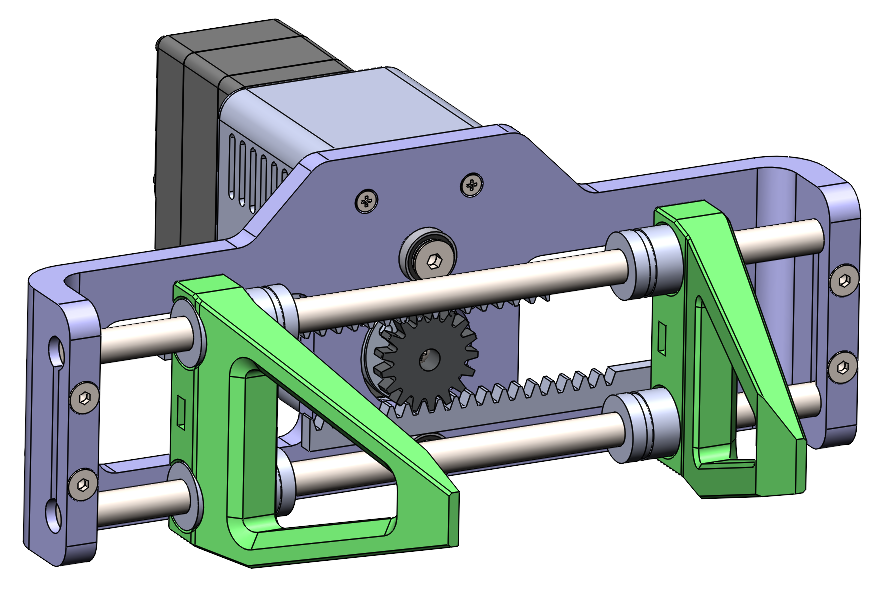
Конструкция параллельного захвата
Положение стоек манипуляторов
- Стойки должны быть повёрнуты под углом 45 градусов для максимального вылета.
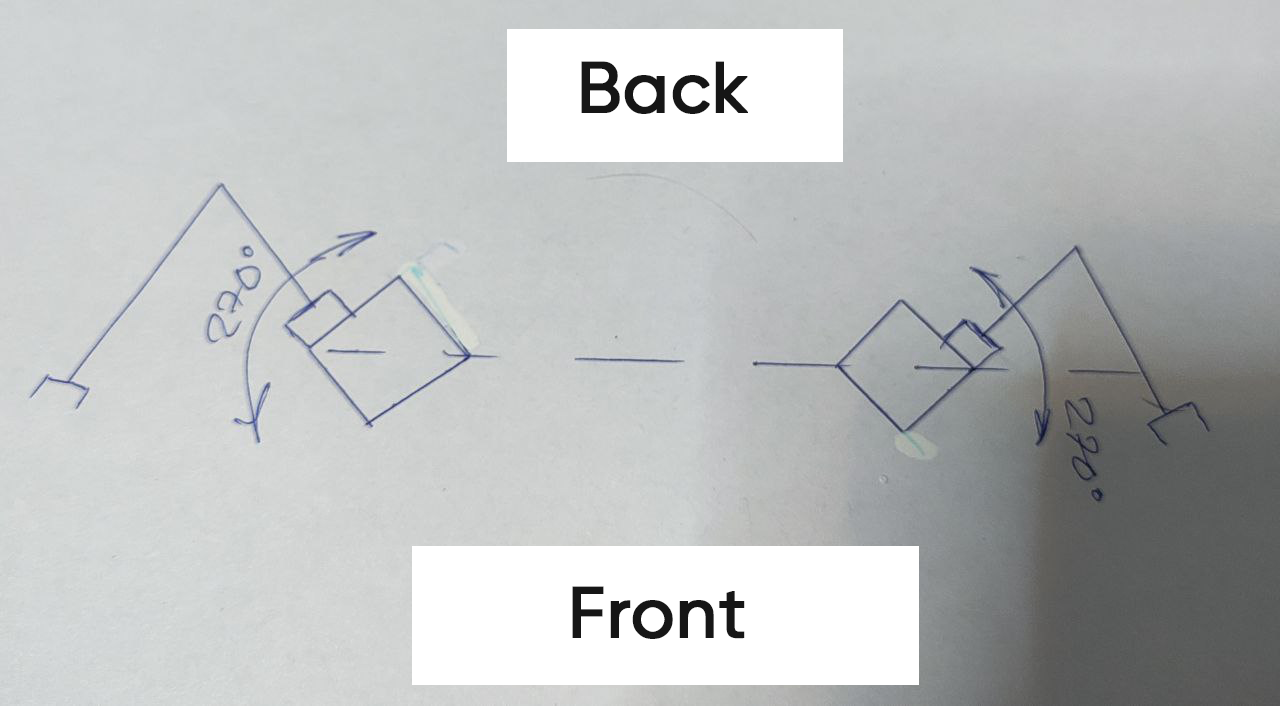
Угол стоек основной рамы
Идея такого угла наклона стоек — обеспечить как можно больше рабочего пространства для манипуляторов.
Верхние датчики
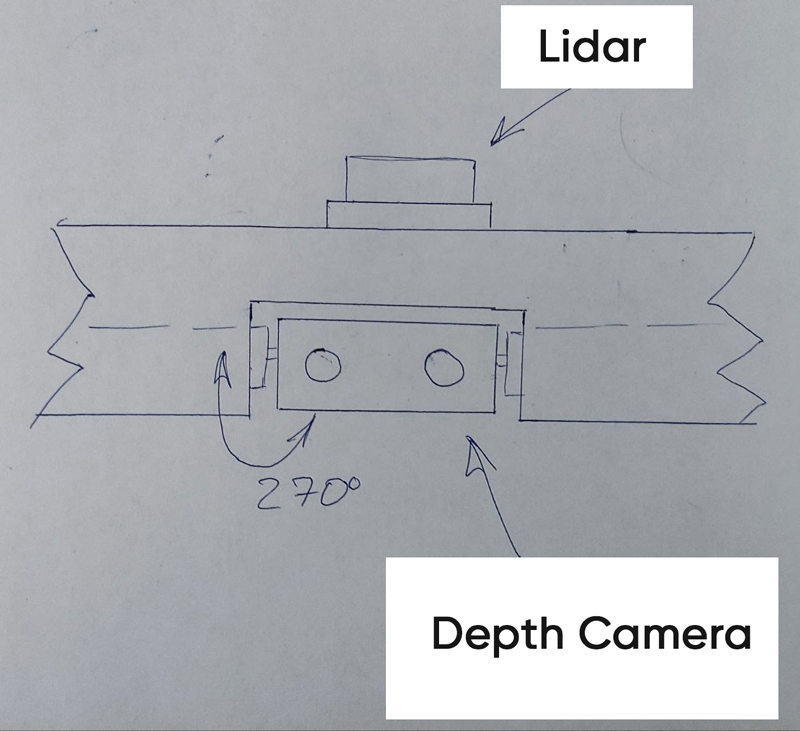
Верхние датчики
- Камера глубины должна вращаться вперёд-назад.
- Сначала я думал использовать 3D-лидары, поэтому разместил один наверху.
Двигатели нижних колёс
- Размер: 8,5 дюйма
- 8,5-дюймовые колёса для электросамокатов

Передние мотор-колёса
Первая версия основной рамы робота

Первая версия основной рамы робота. Вид спереди

Первая версия основной рамы робота. Вид сбоку

Первая версия основной рамы робота. Вид сзади
В этой версии:
- Мы решили использовать тяжёлую заднюю часть вместо адаптивного хвоста. Сначала я думал о баке с водой, так как нужно около 20 кг противовеса, чтобы компенсировать опрокидывающий момент вперёд при вытянутых руках с максимальным грузом.
- Дизайнер использовал оранжевый цвет, чтобы робот был заметен издалека.
Первая версия основной рамы робота

Вторая версия основной рамы робота. Вид спереди

Вторая версия основной рамы робота. Вид спереди
Изменения
- Перешли на чёрный цвет, так как конструкционные прочные пластики чаще всего чёрные.
- Решили сделать плоскую заднюю поверхность, чтобы будущие пользователи могли что-то на неё ставить.
- Вместо бака с водой мы нашли мощные аккумуляторы, которыми можно компенсировать опрокидывающий момент вперёд.
- Дизайнер добавил передние фонари на мобильной базе, лидар и камеру глубины наверху рамы.
Последняя версия концепт-дизайна. Но не финальная…

Концепт-дизайн робота V0. Вид спереди

Концепт-дизайн робота V0. Вид сзади
- Дизайнер добавил 2 манипулятора.
- Задний фонарь.
- Кнопка остановки для предотвращения любого нештатного поведения. Как на следующем вирусном видео:
https://youtu.be/1eYZr9vdGl8?si=-7L6Zf6fB64xzQUC - Второй лидар
Примечания
Финальный дизайн будет отличаться от текущего.
- Сейчас мы работаем над компенсацией люфта двигателей с помощью схемы из двух сервоприводов, поэтому финальные манипуляторы будут иметь другую конструкцию.
- Вместо 3D-лидаров мы, вероятно, будем использовать комбинацию датчиков: 2D- и 1D-лидары, ультразвуковые дальномеры.
Войдите, чтобы оставить комментарий.