移动机器人概念设计的研发
 3453
3453
五月,我们完成了机器人完整设计的第一个版本。我想一步步展示我们从何处起步,以及最终得到了什么。
初始需求
- 需要在考虑结构技术规格的前提下创建一个 3D 设计概念。
- 该模型应在某一环境中展示——室内场景,由人通过 VR 头显 Oculus Quest 3 进行操控。
- 必须提供源文件。
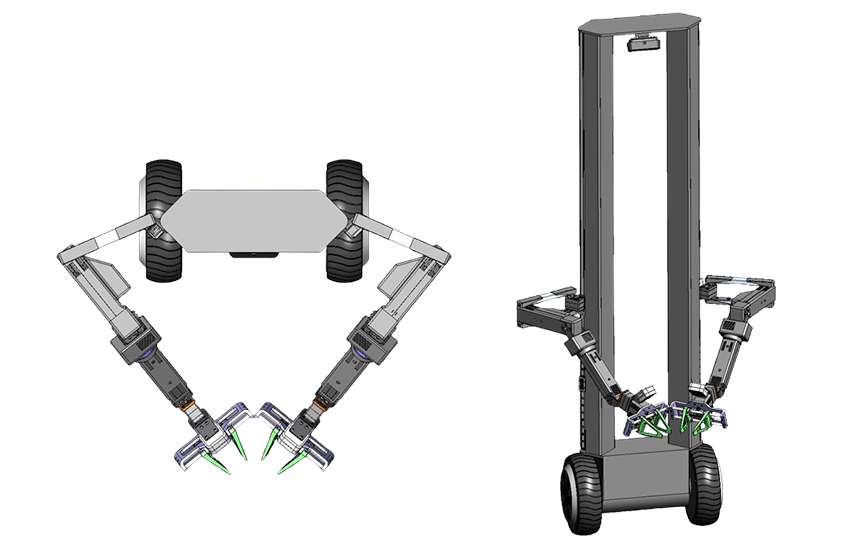
初始概念。设计由我们的工程师提供
外部参数
- 哑光黑色。也可以考虑其他配色方案:白色、黄色。
- 车架尺寸:350 mm 至 400 mm ×(1300–1400 mm,含车轮高度)。
- 工作形态——类似 Segway。
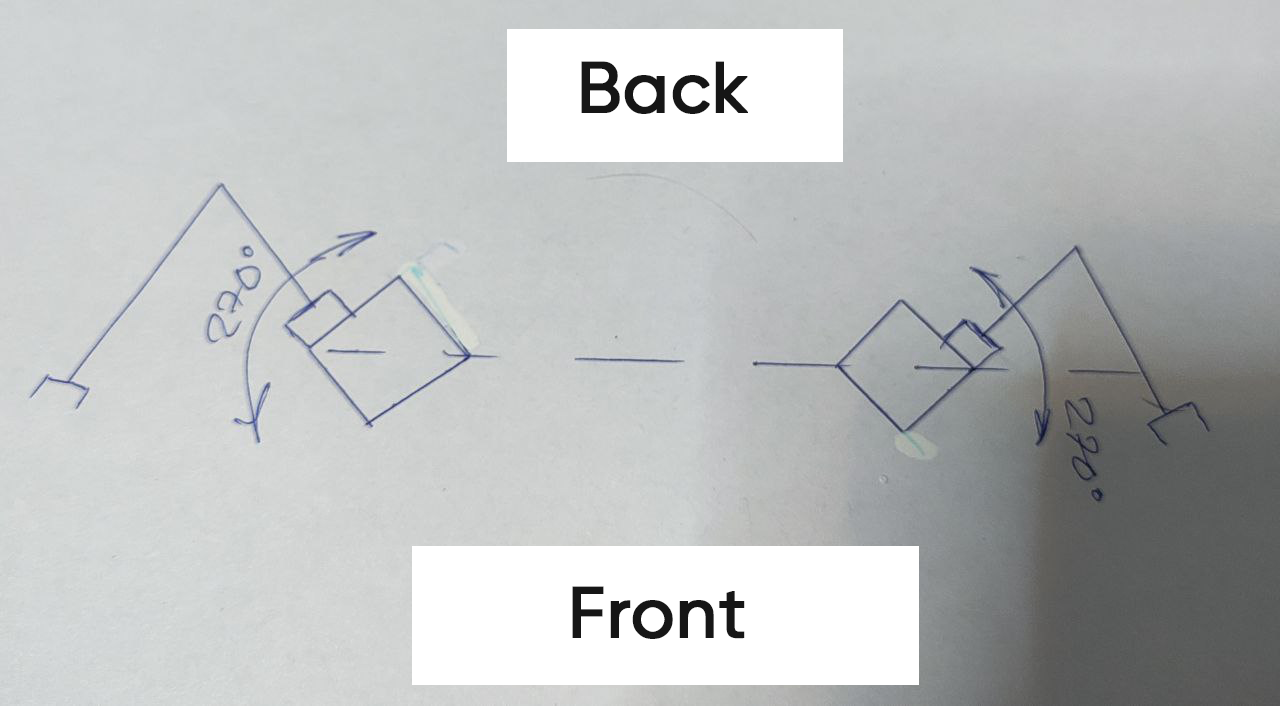
- 上部 П 形车架从正面和背面看应当完全一致。
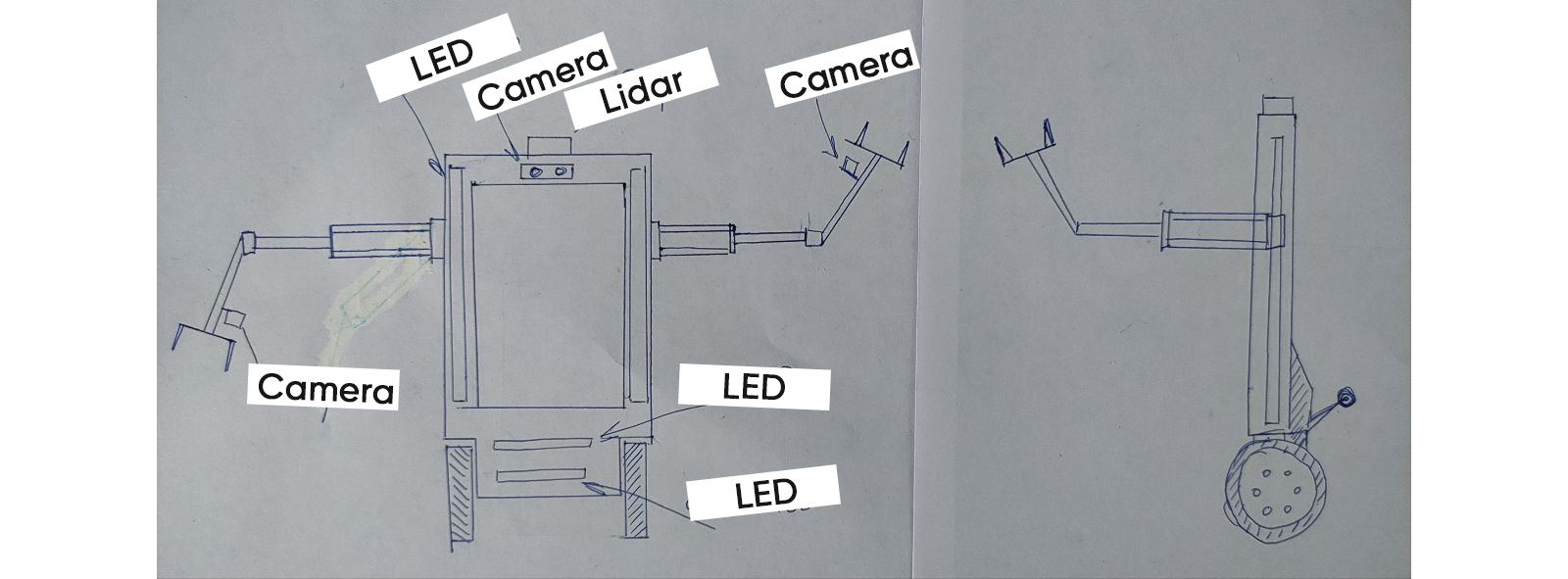
- 上部车架上应安装一个深度相机和一个 LiDAR。
- 侧面车架上应安装 LED 灯带。
- 下部平台上也应安装 LED 灯带。
- 机械臂上应安装类似 Intel RealSense D405 的深度相机。
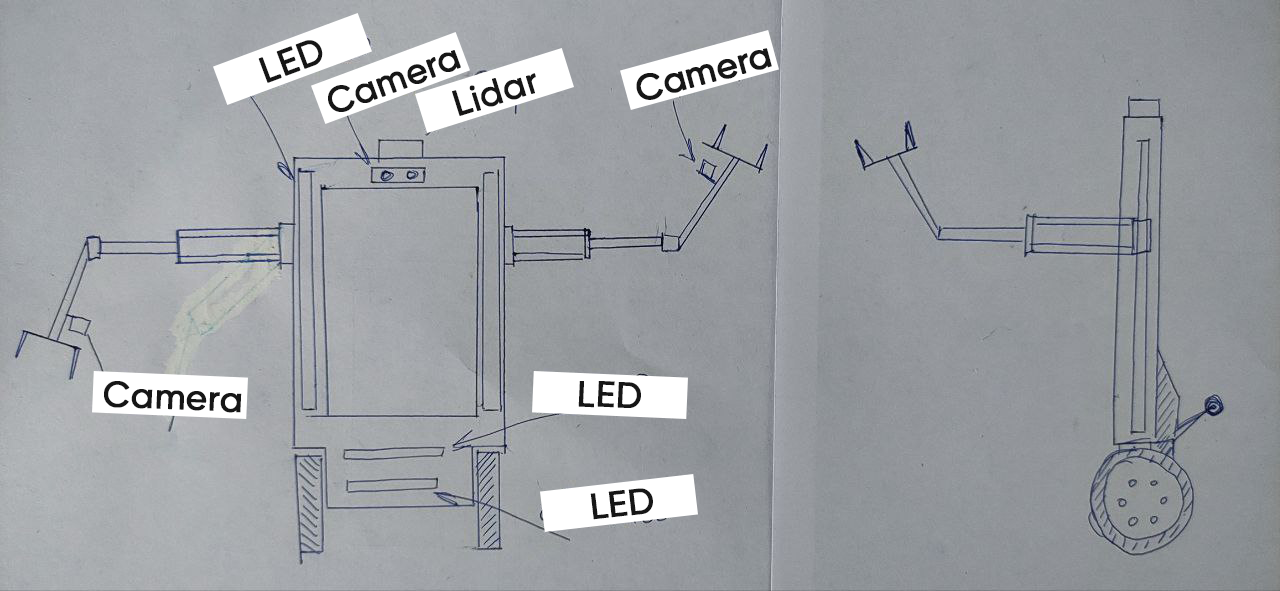
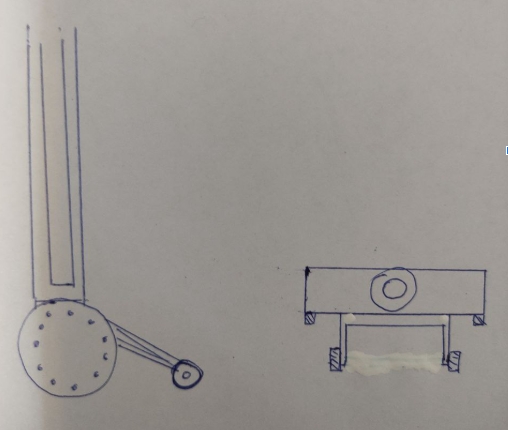
草图展示了传感器的位置
平衡机构
尾部将始终处于下放位置,呈类似 П 字母的直线形状,两端各有一个滚轮。这些滚轮为非驱动式。
平衡机构。下放位置。侧视图
平衡机构
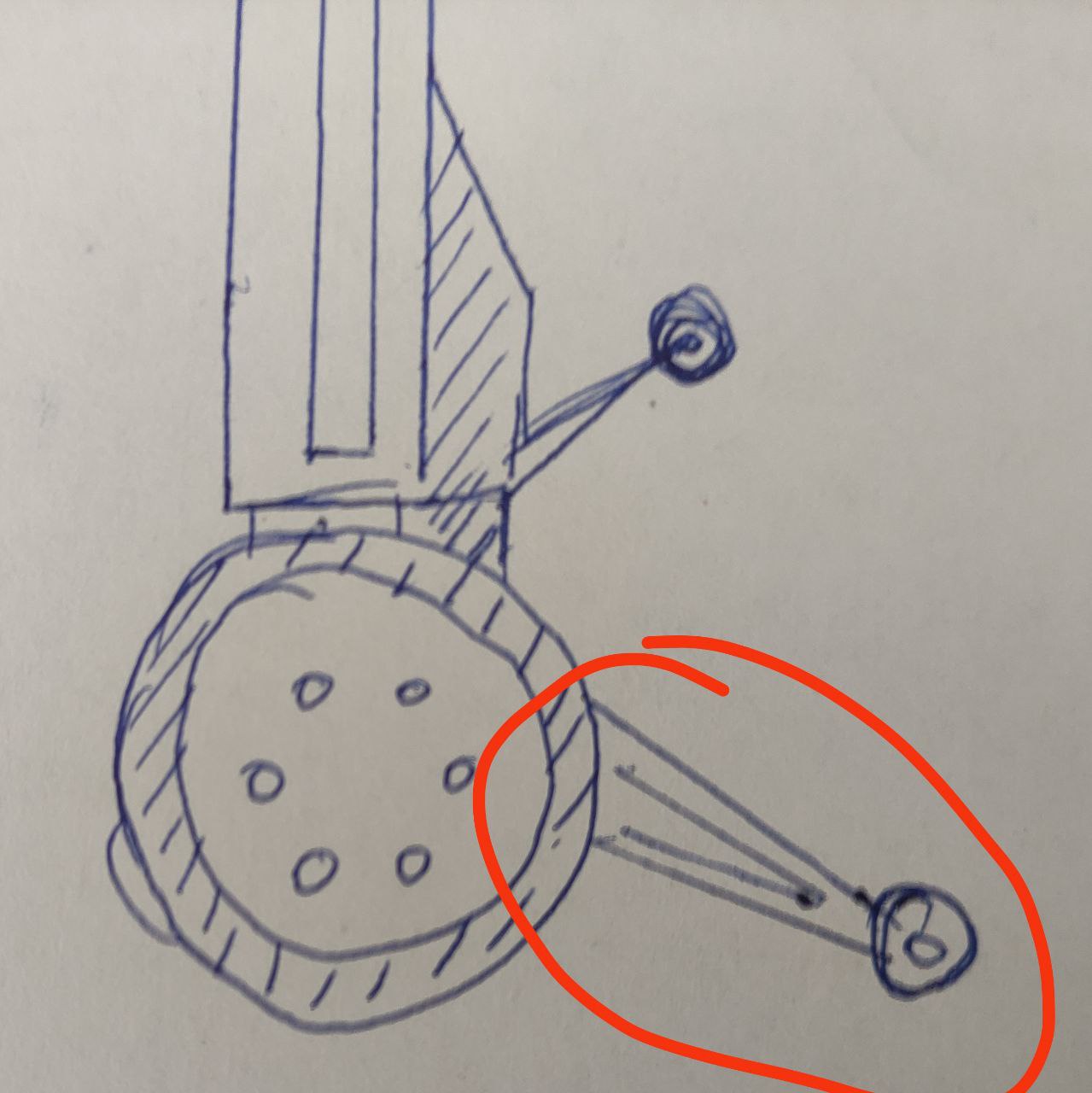
车轮
万向轮,如图所示: 3 英寸小型工业脚轮

机器人后轮
机械臂
- 机械臂可伸展至立柱的全部高度。
- 高度——1300 mm
- 长度——650 mm
- 第二关节上的凸出部分需要进行调整;工程师将确定如何移除该结构或将其向内移动。
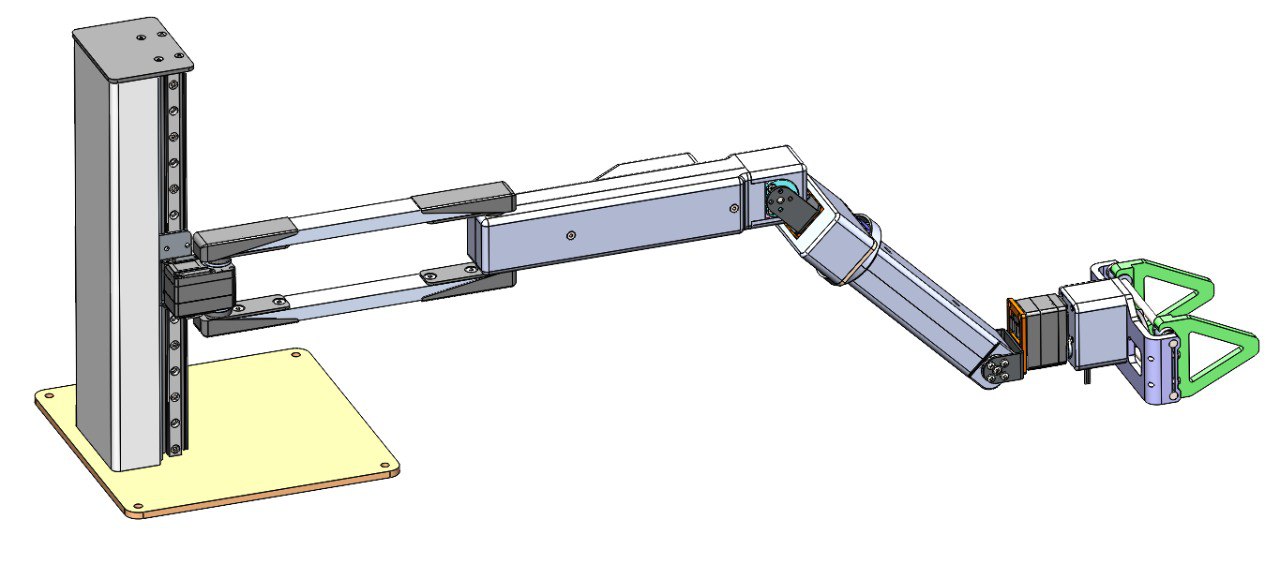
机器人机械臂
夹爪的设计
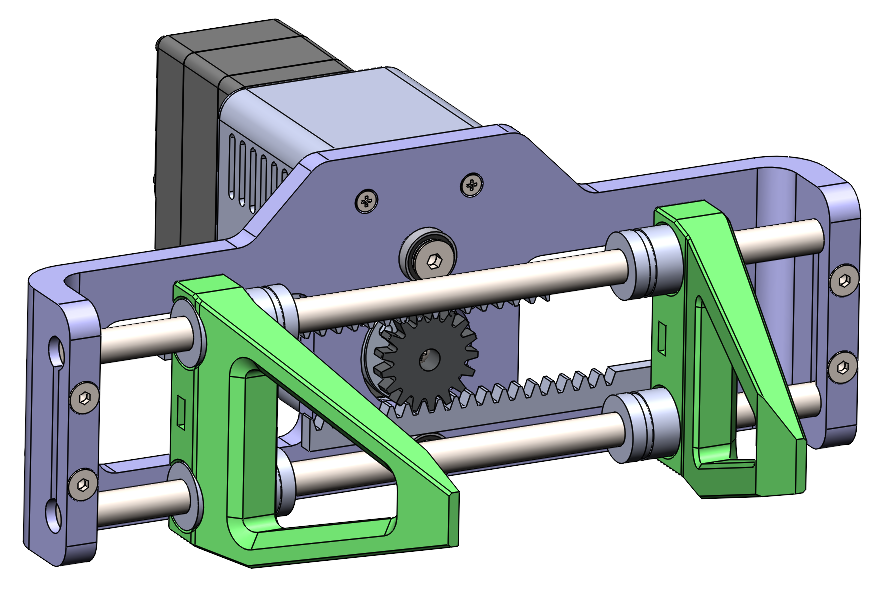
平行夹爪设计
机械臂立柱的位置
- 立柱应转动 45 度角,以确保最大的伸展范围。
主车架立柱角度
采用这种立柱倾斜角度的想法,是为了给机械臂提供尽可能大的工作空间。
顶部传感器
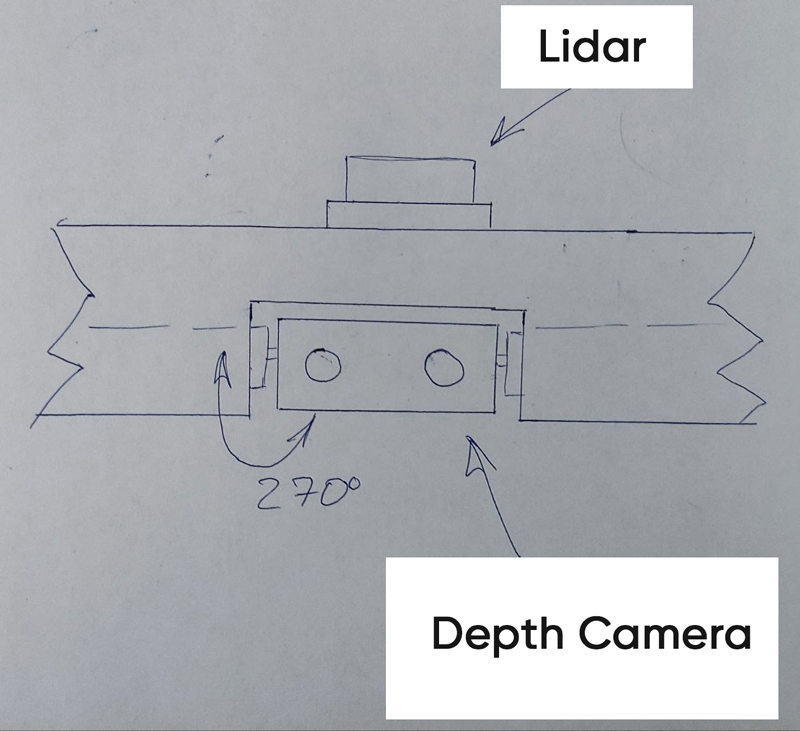
顶部传感器
- 深度相机应能前后旋转。
- 起初我打算使用 3D LiDAR,所以在顶部放置了一个。
下部车轮电机
- 尺寸:8.5 英寸
- 用于电动滑板车的 8.5 英寸车轮

前部电动轮毂电机
机器人主车架的第一个版本

机器人主车架的第一个版本。正视图

机器人主车架的第一个版本。侧视图

机器人主车架的第一个版本。后视图
在这个版本中:
- 我们决定采用配重较大的后部,而不是自适应尾部。起初我考虑使用水箱,因为当机械臂以最大负载伸展时,需要约 20 kg 的配重来抵消向前的倾覆力矩。
- 设计师使用了橙色,使机器人在很远的距离也能被看到。
机器人主车架的第一个版本

机器人主车架的第二个版本。正视图

机器人主车架的第二个版本。正视图
更新
- 改用了黑色,因为高强度工程塑料大多是黑色的。
- 决定将后部做成平面,以便未来的用户可以在上面放置物品。
- 我们没有采用水箱,而是找到了大容量电池,可以用它来抵消向前的倾覆力矩。
- 设计师在移动底座上增加了前照灯,并在车架顶部增加了 LiDAR 和深度相机。
概念设计的最新版本。但还不是最终版……

机器人 V0 设计概念。正视图

机器人 V0 设计概念。后视图
- 设计师增加了 2 个机械臂。
- 后灯。
- 设置了停止按钮,以防止任何可能出现的失控行为。就像下面这段热门视频中那样:
https://youtu.be/1eYZr9vdGl8?si=-7L6Zf6fB64xzQUC - 第二个 LiDAR
备注
最终设计将与当前版本有所不同。
- 目前我们正在采用双舵机方案来补偿电机的回程间隙,因此最终的机械臂将采用不同的设计。
- 我们很可能不会使用 3D LiDAR,而是采用多种传感器的组合,例如 2D、1D LiDAR 和超声波测距传感器。
登录后即可发表评论。