Desenvolvimento do design conceitual do robô móvel
 3453
3453
Em maio, concluímos a primeira variação do design completo do robô. Quero mostrar, passo a passo, de onde partimos e o que obtivemos no final.
Requisitos iniciais
- É preciso criar um conceito de design 3D levando em conta as especificações técnicas da estrutura.
- O modelo deve ser apresentado em um ambiente — em local fechado, controlado por uma pessoa usando o VR Oculus Quest 3.
- Os arquivos-fonte devem ser fornecidos.
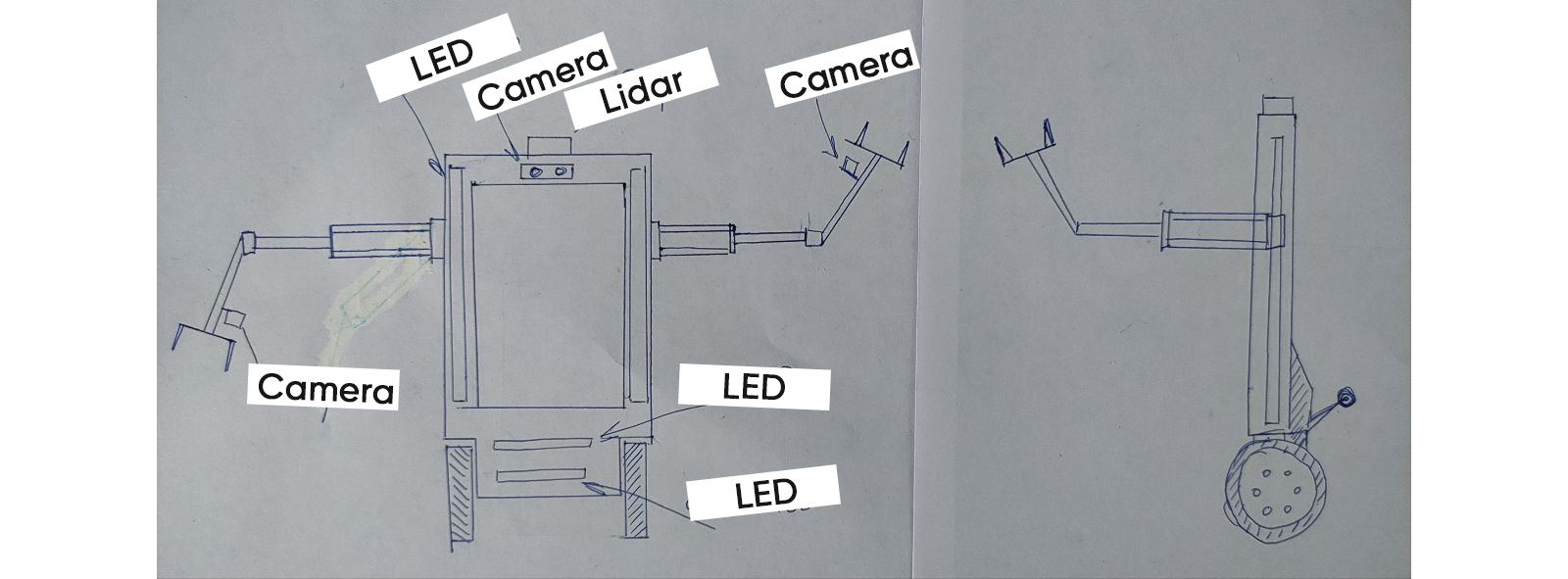
Conceito inicial. Design fornecido pelo nosso engenheiro
Parâmetros externos
- Cor preta fosca. Esquemas de cores alternativos podem ser considerados: branco, amarelo.
- Dimensões do chassi: de 350 mm a 400 mm × (1300 mm – 1400 mm incluindo a altura das rodas).
- Formato de operação – como um Segway.
- A vista do quadro superior em formato de П, pela frente e por trás, deve ser idêntica.
- Uma câmera de profundidade e um LiDAR devem ser instalados no quadro superior.
- Fitas de LED devem ser instaladas nos quadros laterais.
- Fitas de LED também devem ser instaladas na plataforma inferior.
- Câmeras de profundidade semelhantes à Intel RealSense D405 devem ser montadas nos manipuladores.
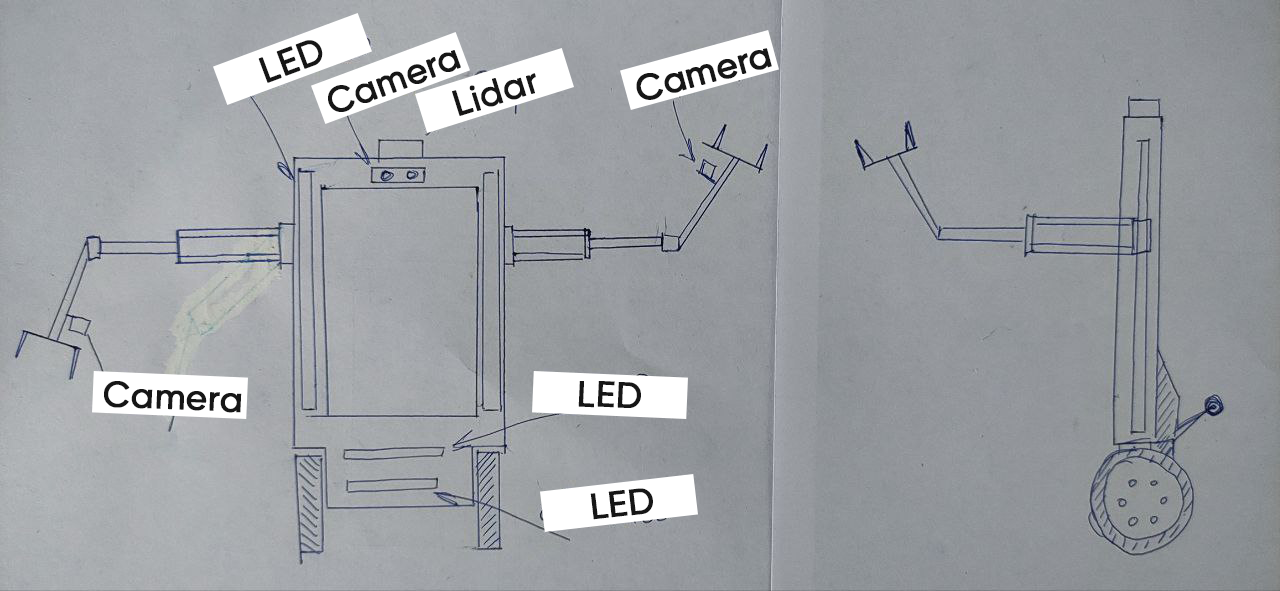
O esboço mostra a posição dos sensores
Mecanismo de equilíbrio
A cauda permanecerá o tempo todo na posição abaixada e terá um formato reto, lembrando a letra П, com um rolete em cada extremidade. Os roletes não são motorizados.
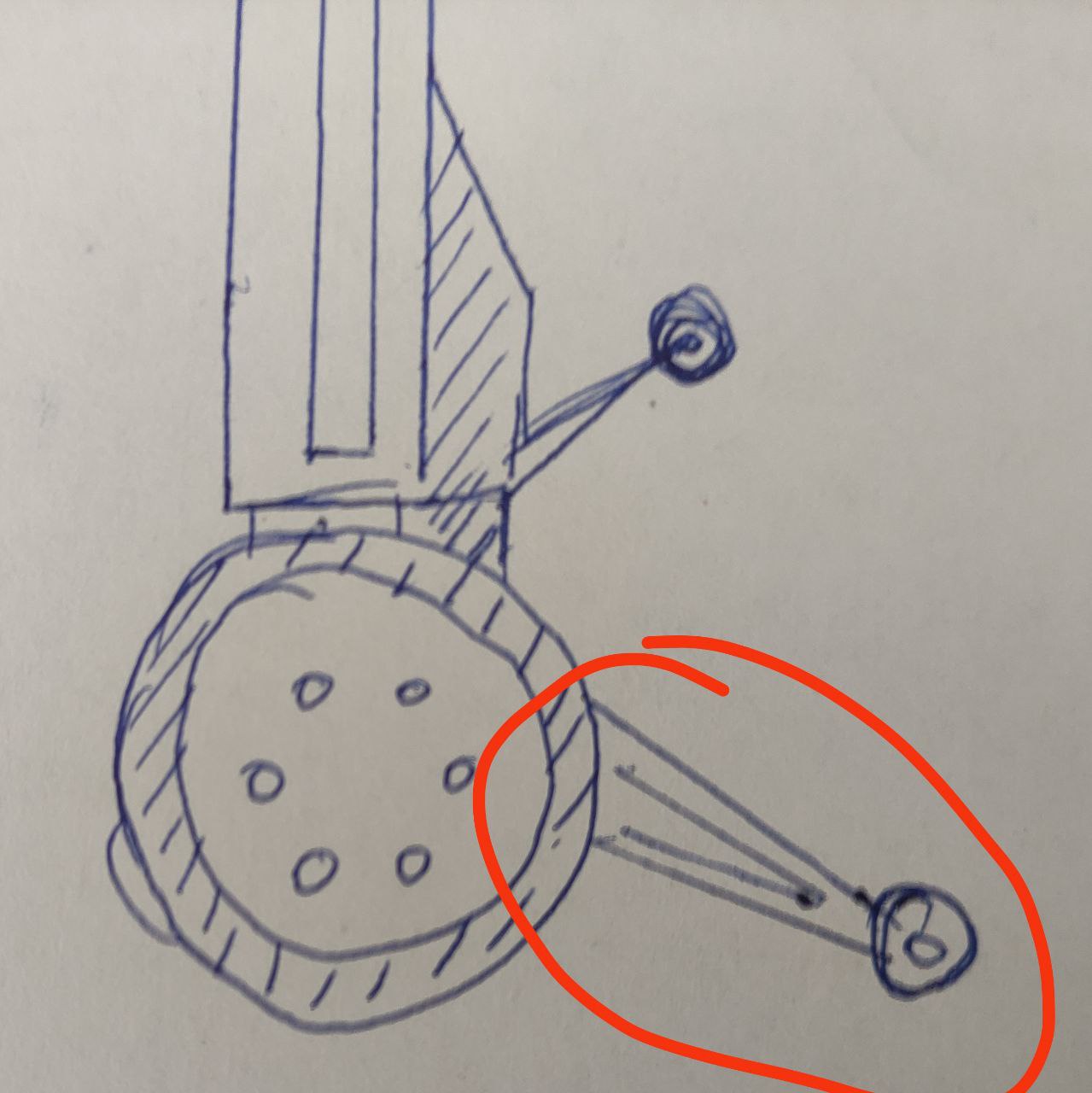
Mecanismo de equilíbrio. Posição inferior. Vista de perfil
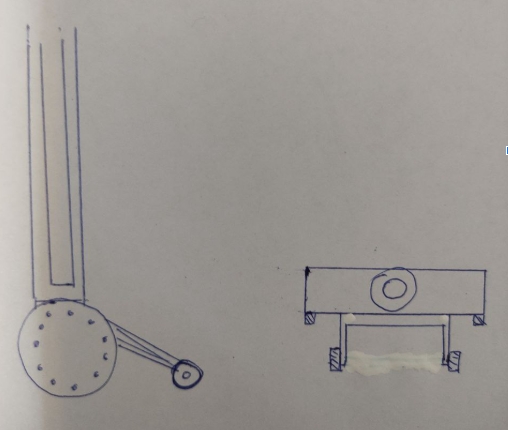
Mecanismo de equilíbrio
Rodas
Rodas giratórias, como na imagem: Rodízios industriais pequenos de 3 polegadas

Rodas traseiras do robô
Manipuladores
- Os manipuladores se estendem por toda a altura da coluna.
- Altura – 1300 mm
- Comprimento – 650 mm
- A saliência na segunda articulação precisa ser ajustada; o engenheiro determinará como removê-la ou deslocar a estrutura para dentro.
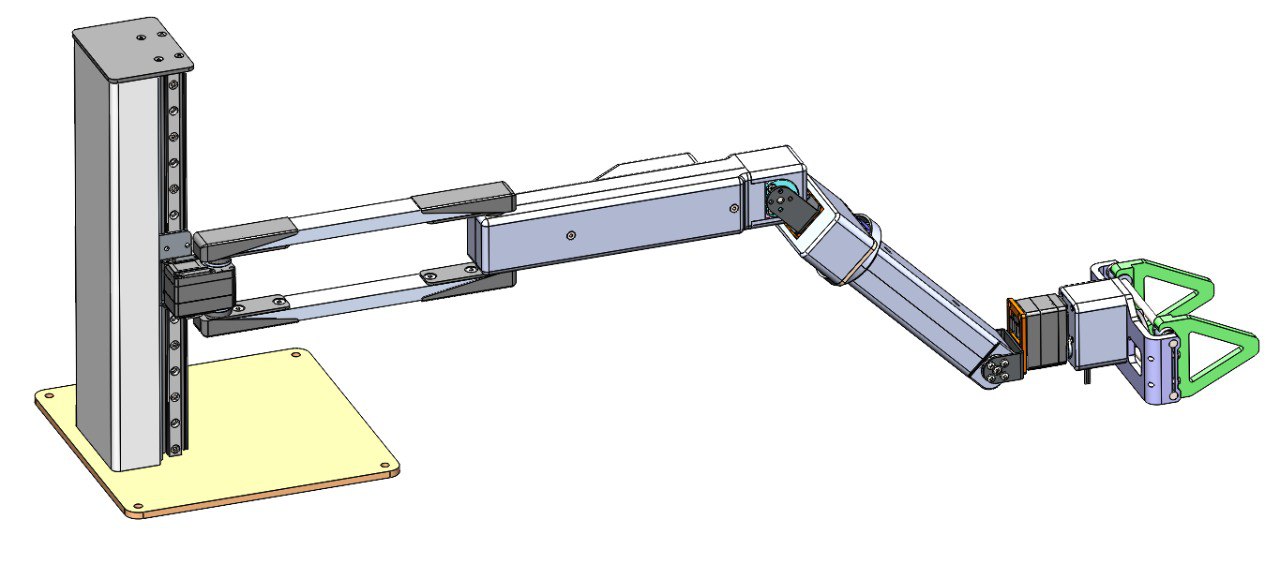
Braço do robô
Design da garra
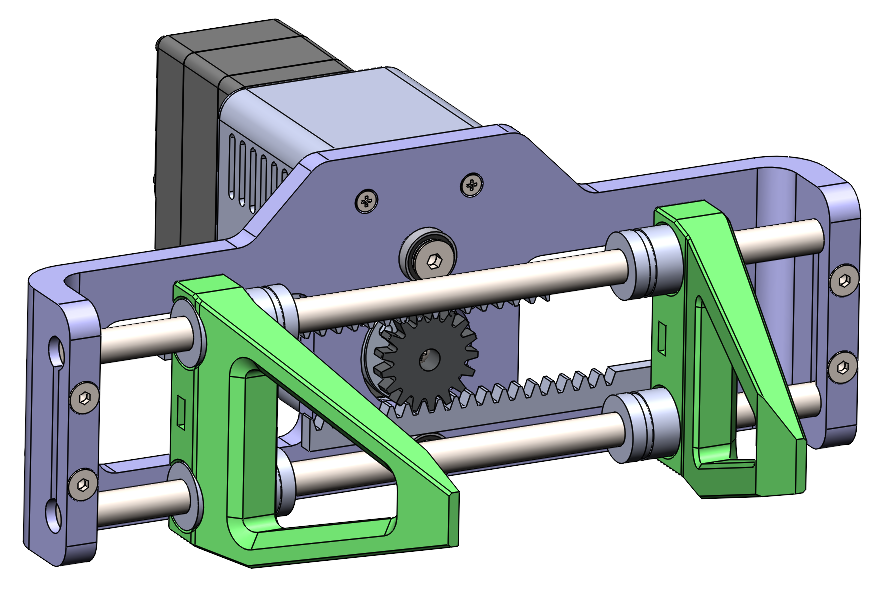
Design da garra paralela
Posição das colunas dos manipuladores
- As colunas devem ser giradas em um ângulo de 45 graus para garantir o máximo alcance.
Ângulo das colunas do chassi principal
A ideia desse ângulo de inclinação das colunas é proporcionar o máximo possível de espaço de trabalho para os manipuladores.
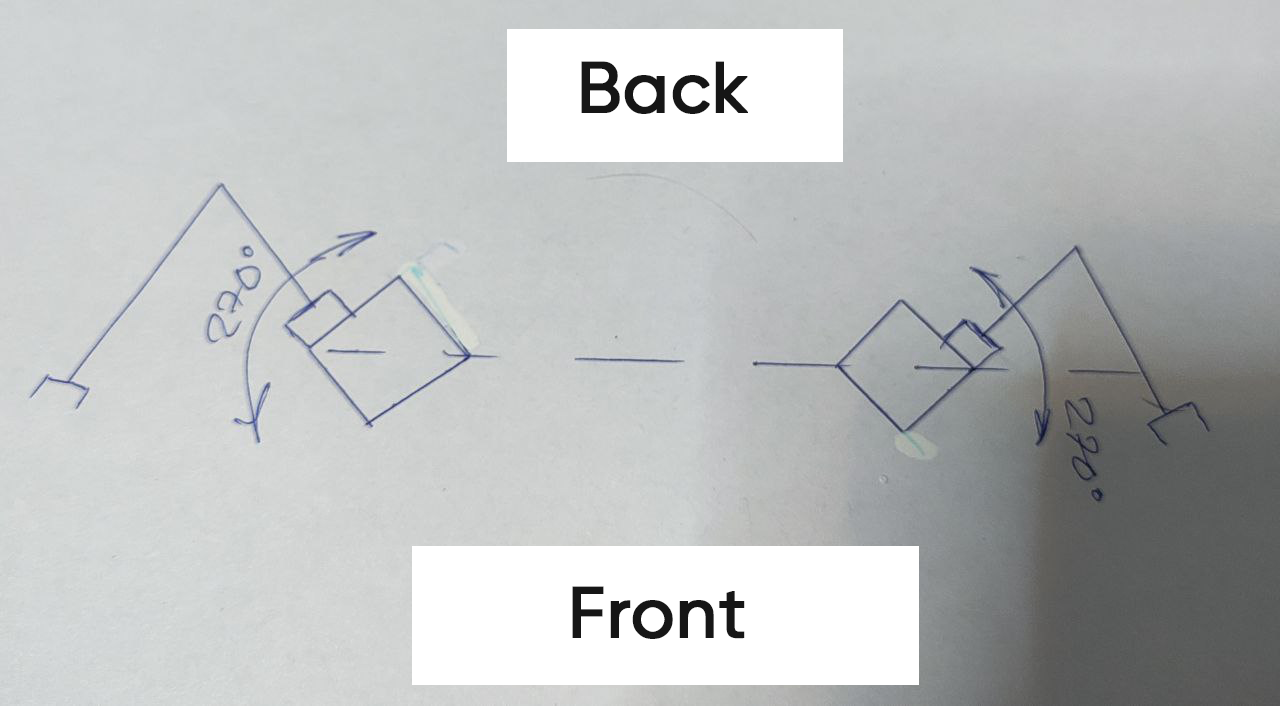
Sensores superiores
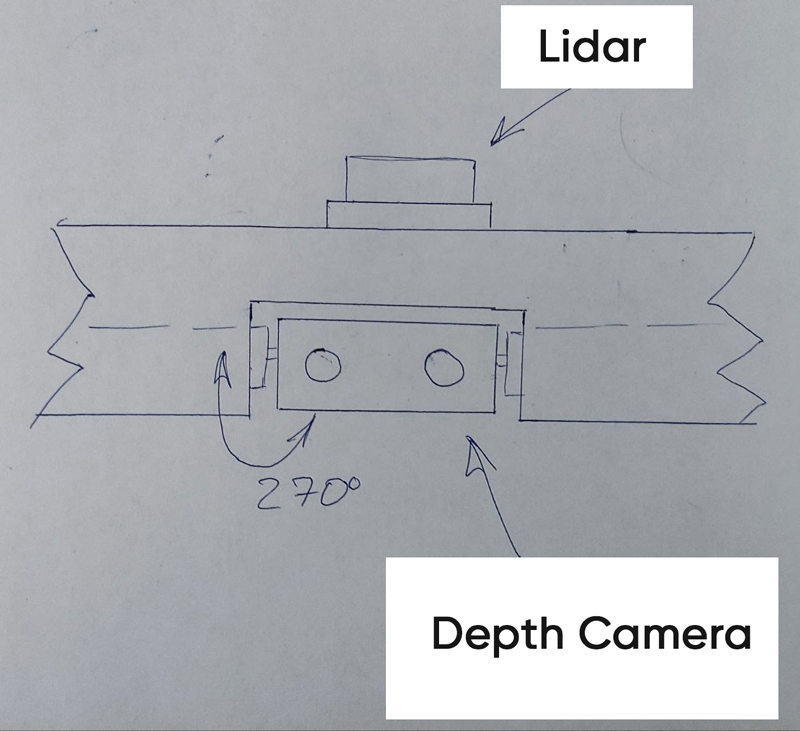
Sensores superiores
- A câmera de profundidade deve girar para frente e para trás.
- Inicialmente pensei em usar LiDARs 3D, então coloquei um no topo.
Motores das rodas inferiores
- Tamanho: 8,5 polegadas
- Rodas de 8,5 polegadas para patinetes elétricos

Rodas dianteiras com motor elétrico
Primeira versão do chassi principal do robô

Primeira versão do chassi principal do robô. Vista frontal

Primeira versão do chassi principal do robô. Vista de perfil

Primeira versão do chassi principal do robô. Vista traseira
Nesta versão:
- Decidimos usar uma traseira pesada em vez de uma cauda adaptativa. Inicialmente pensei em usar um tanque de água, porque precisamos de cerca de 20 kg de contrapeso para compensar o momento de tombamento para a frente quando os braços estão estendidos com o peso máximo.
- O designer usou a cor laranja para tornar o robô visível a longa distância.
Primeira versão do chassi principal do robô

Segunda versão do chassi principal do robô. Vista frontal

Segunda versão do chassi principal do robô. Vista frontal
Alterações
- Mudamos para a cor preta, porque os plásticos de engenharia resistentes são, na maioria, pretos.
- Decidimos usar uma superfície plana na traseira para permitir que futuros usuários coloquem algo em cima.
- Em vez de um tanque de água, encontramos baterias de alta capacidade que podemos usar para compensar o momento de tombamento para a frente.
- O designer adicionou luzes dianteiras na base móvel, além de um LiDAR e uma câmera de profundidade no topo do chassi.
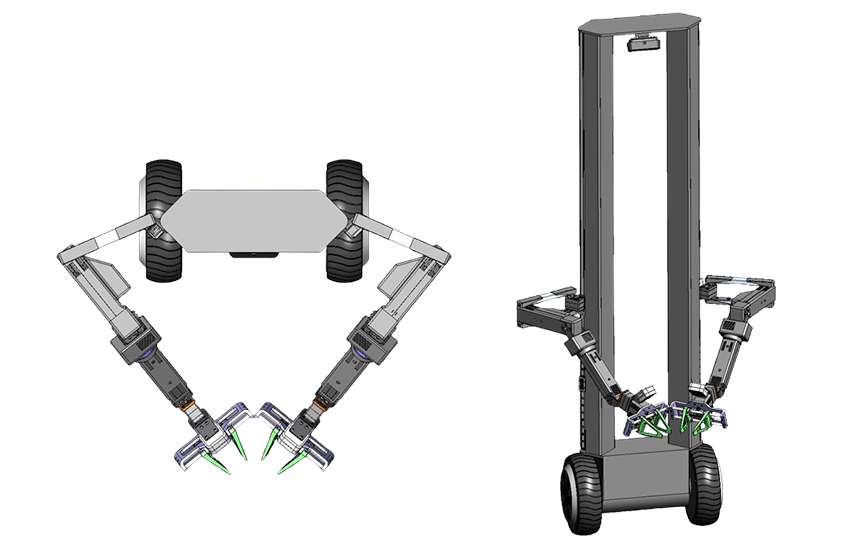
Última versão do design conceitual. Mas não a final…

Conceito de design do robô V0. Vista frontal

Conceito de design do robô V0. Vista traseira
- O designer adicionou 2 manipuladores.
- Luz traseira.
- Botão de parada para evitar qualquer possível comportamento extremo. Como no vídeo viral a seguir:
https://youtu.be/1eYZr9vdGl8?si=-7L6Zf6fB64xzQUC - Segundo LiDAR
Observações
O design final será diferente do atual.
- Atualmente, estamos trabalhando na compensação da folga dos motores usando um design de servo duplo. Por isso, os braços finais terão um design diferente.
- Em vez de LiDARs 3D, provavelmente usaremos uma combinação de sensores, como LiDARs 2D e 1D e sensores ultrassônicos de distância.
Entre para deixar um comentário.