Développement du design conceptuel du robot mobile
 3454
3454
En mai, nous avons achevé une première variante du design complet du robot. Je veux montrer étape par étape ce dont nous sommes partis et ce que nous avons finalement obtenu.
Exigences initiales
- Il faut créer un concept de design 3D en tenant compte des caractéristiques techniques de la structure.
- Le modèle doit être présenté dans un environnement — en intérieur, piloté par une personne équipée d’un casque VR Oculus Quest 3.
- Les fichiers sources doivent être fournis.
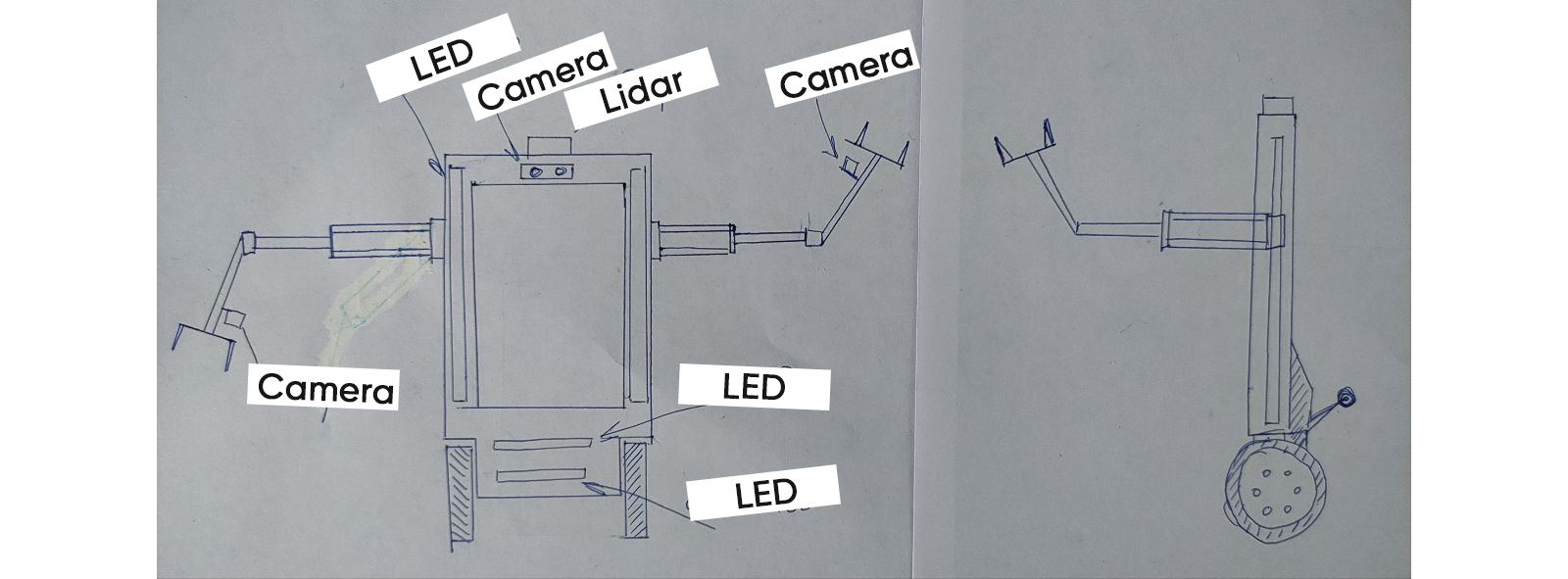
Concept initial. Design fourni par notre ingénieur
Paramètres extérieurs
- Couleur noir mat. Des schémas de couleurs alternatifs peuvent être envisagés : blanc, jaune.
- Dimensions du cadre : de 350 à 400 mm × (1300 à 1400 mm en incluant la hauteur des roues).
- Format de fonctionnement — comme un Segway.
- La vue du cadre supérieur en forme de П, de face et de dos, doit être identique.
- Une caméra de profondeur et un LiDAR doivent être installés sur le cadre supérieur.
- Des bandes LED doivent être installées sur les cadres latéraux.
- Des bandes LED doivent également être installées sur la plateforme inférieure.
- Des caméras de profondeur similaires à l’Intel RealSense D405 doivent être montées sur les manipulateurs.
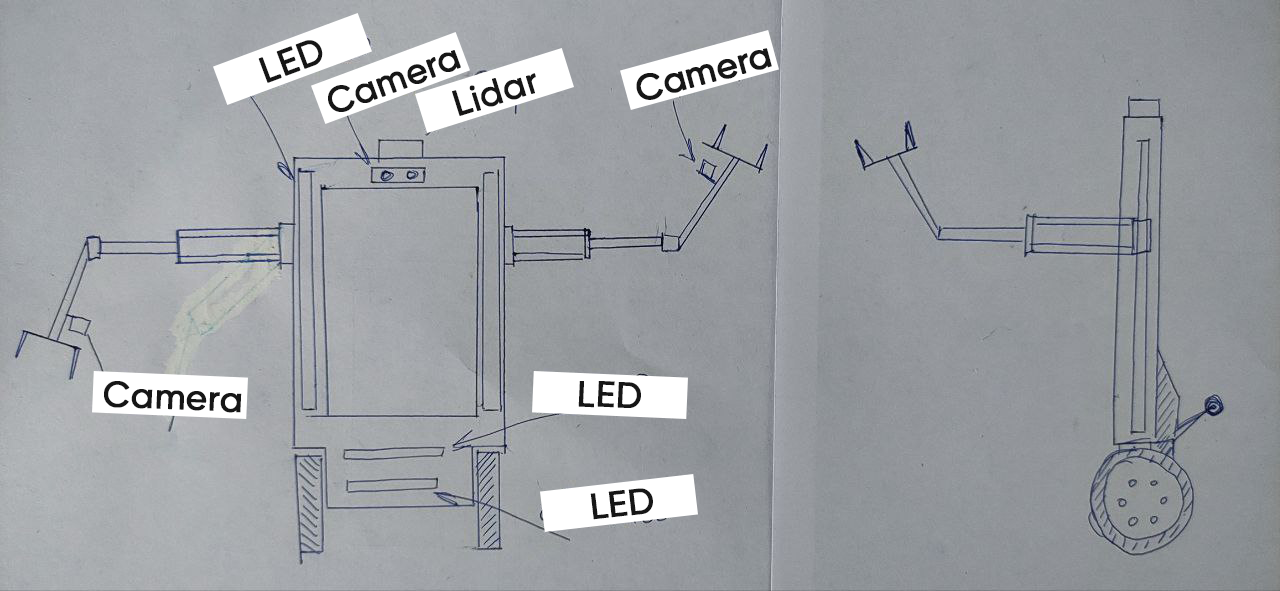
Le croquis montre l’emplacement des capteurs
Mécanisme d’équilibrage
La queue restera tout le temps en position abaissée et aura une forme droite rappelant la lettre П, avec un galet à chaque extrémité. Les galets sont non motorisés.
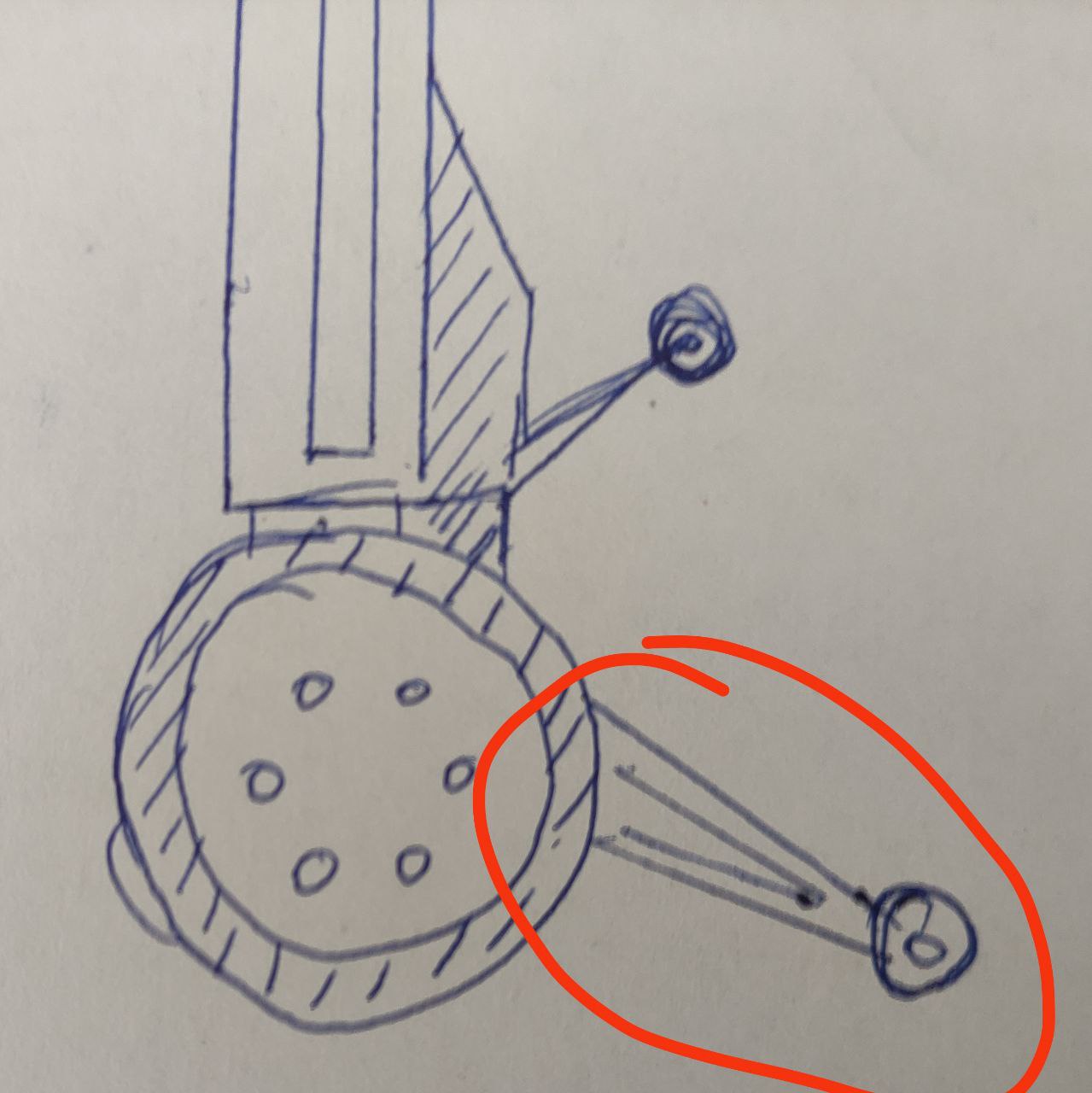
Mécanisme d’équilibrage. Position basse. Vue de profil
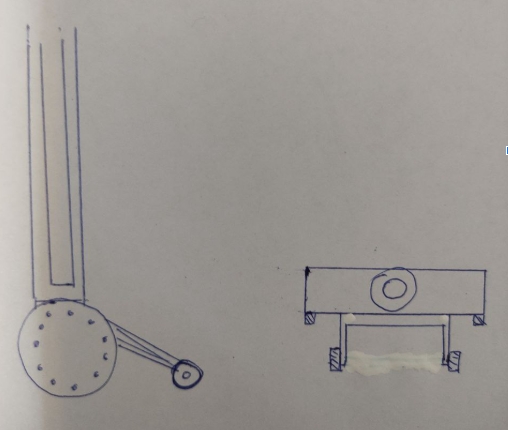
Mécanisme d’équilibrage
Roues
Roues pivotantes, comme sur l’image : Petites roulettes industrielles de 3 pouces

Roues arrière du robot
Manipulateurs
- Les manipulateurs se déploient sur toute la hauteur du montant.
- Hauteur — 1300 mm
- Longueur — 650 mm
- La saillie sur la deuxième articulation doit être retravaillée ; l’ingénieur déterminera comment supprimer ou déplacer la structure vers l’intérieur.
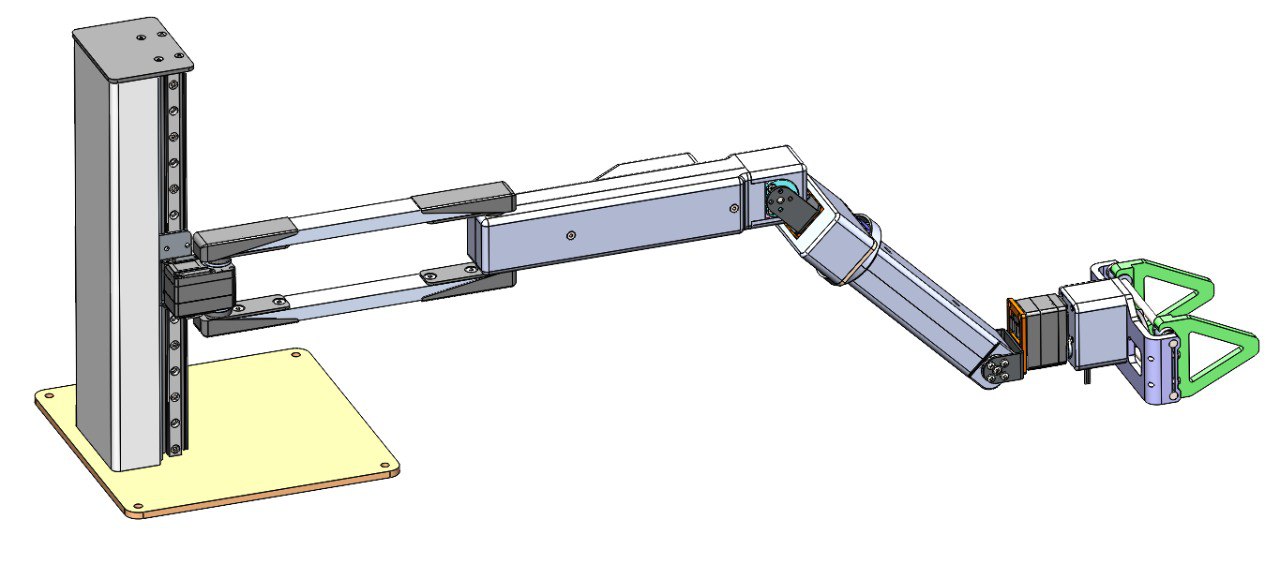
Bras du robot
Conception de la pince
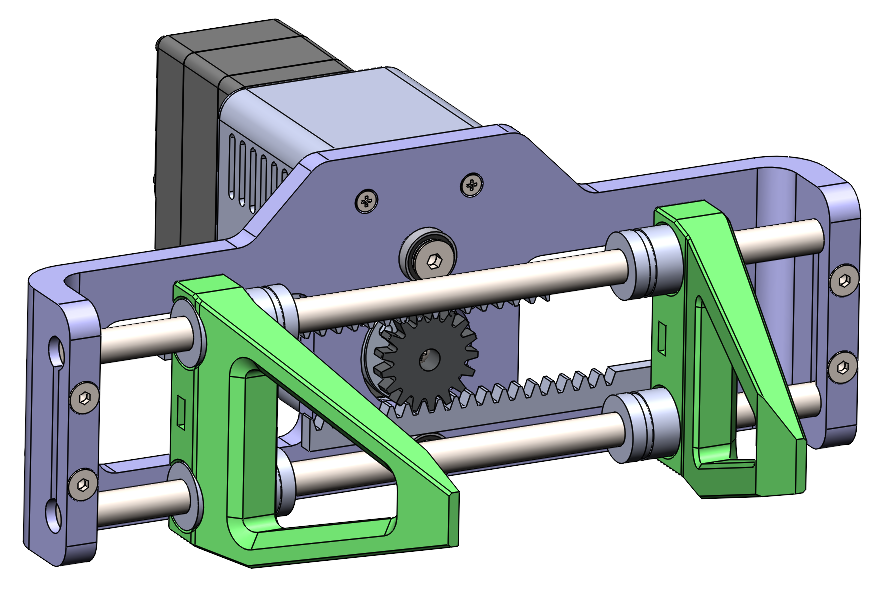
Conception de la pince parallèle
Position des montants des manipulateurs
- Les montants doivent être inclinés à 45 degrés pour assurer une portée maximale.
Angle des montants du cadre principal
L’idée d’un tel angle d’inclinaison des montants est d’offrir le plus d’espace de travail possible aux manipulateurs.
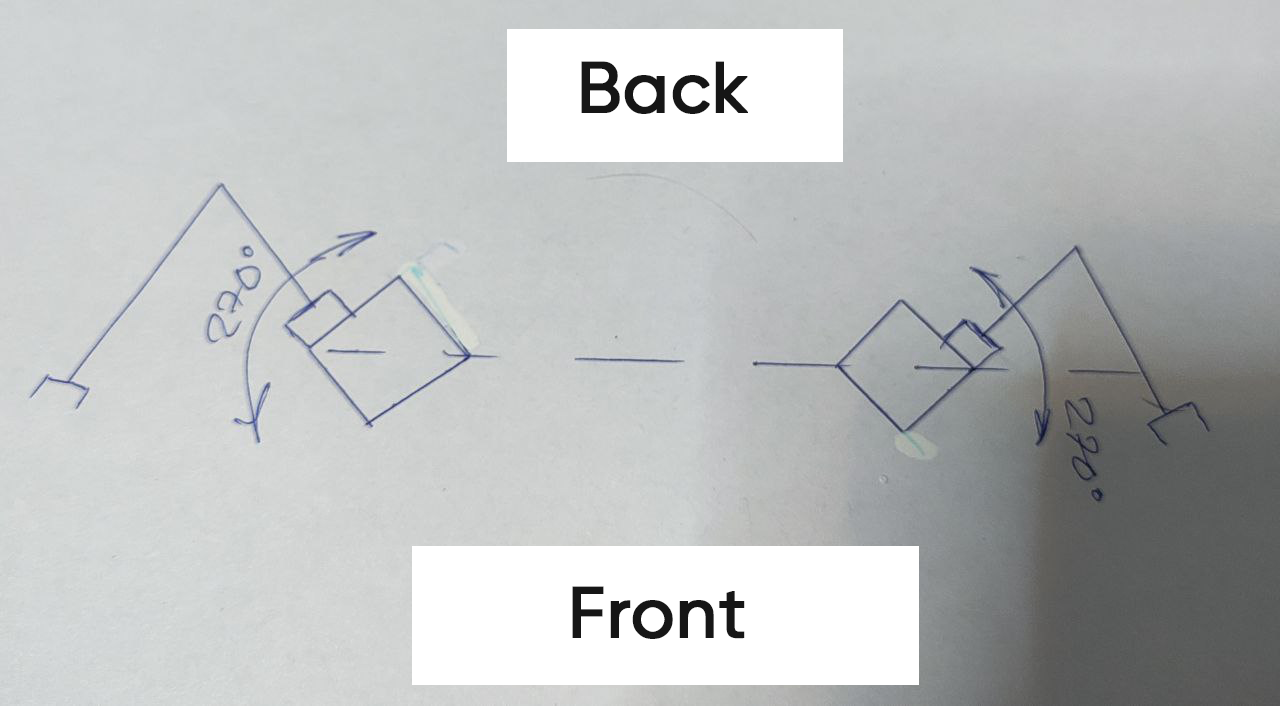
Capteurs supérieurs
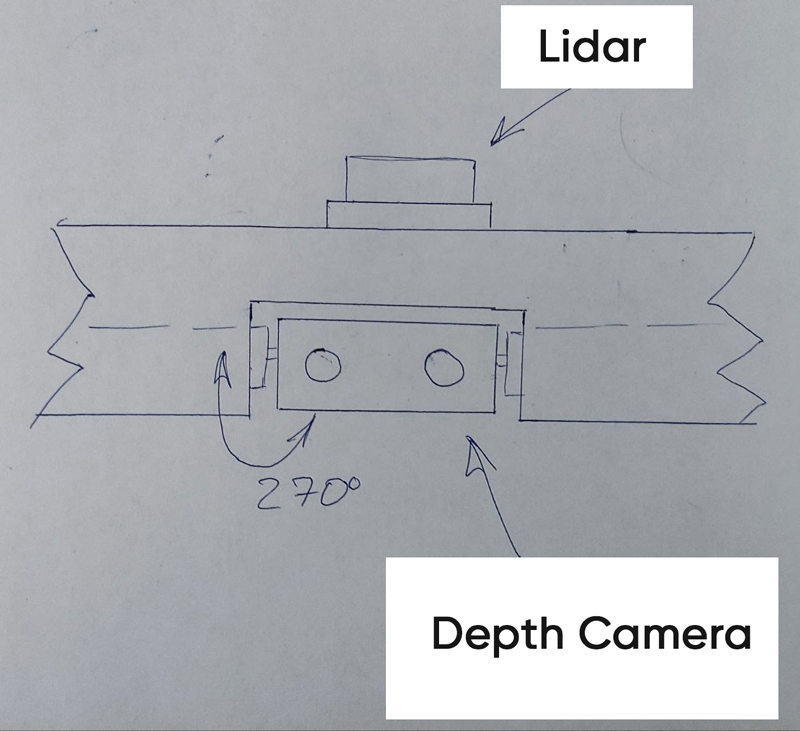
Capteurs supérieurs
- La caméra de profondeur doit pivoter d’avant en arrière.
- Au départ, je pensais utiliser des LiDAR 3D, j’en ai donc placé un en haut.
Moteurs des roues inférieures
- Taille : 8,5 pouces
- Roues de 8,5 pouces pour trottinettes électriques

Roues motrices électriques avant
Première version du cadre principal du robot

Première version du cadre principal du robot. Vue de face

Première version du cadre principal du robot. Vue de profil

Première version du cadre principal du robot. Vue de dos
Dans cette version :
- Nous avons décidé d’utiliser une partie arrière lourde au lieu d’une queue adaptative. Au départ, je pensais à un réservoir d’eau, car il faut environ 20 kg de contrepoids pour compenser le moment de basculement vers l’avant lorsque les bras sont déployés avec une charge maximale.
- Le designer a utilisé la couleur orange pour rendre le robot visible de loin.
Première version du cadre principal du robot

Deuxième version du cadre principal du robot. Vue de face

Deuxième version du cadre principal du robot. Vue de face
Modifications
- Nous sommes passés à la couleur noire, car les plastiques techniques résistants sont le plus souvent noirs.
- Nous avons décidé de rendre la surface arrière plate afin que les futurs utilisateurs puissent y poser quelque chose.
- Au lieu d’un réservoir d’eau, nous avons trouvé des batteries robustes que nous pouvons utiliser pour compenser le moment de basculement vers l’avant.
- Le designer a ajouté des feux avant sur la base mobile, un LiDAR et une caméra de profondeur en haut du cadre.
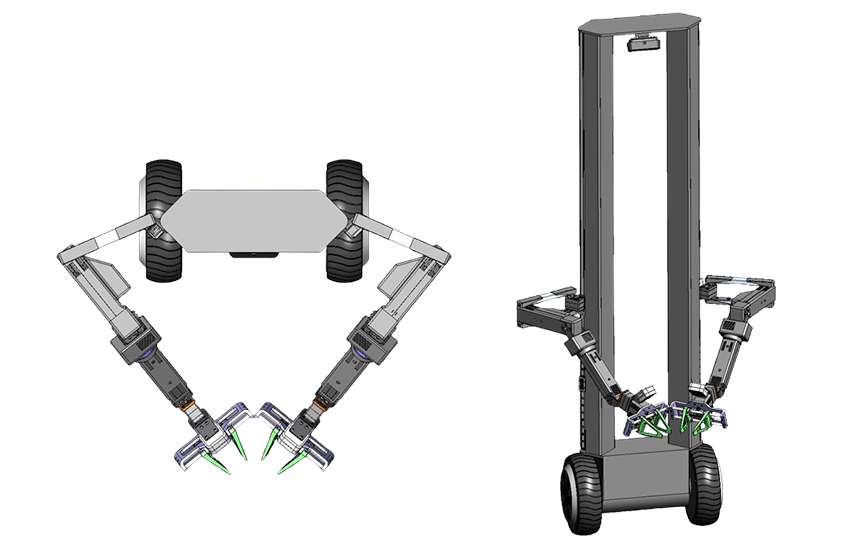
Dernière version du design conceptuel. Mais pas définitive…

Design conceptuel du robot V0. Vue de face

Design conceptuel du robot V0. Vue de dos
- Le designer a ajouté 2 manipulateurs.
- Feu arrière.
- Un bouton d’arrêt pour prévenir tout comportement anormal possible. Comme dans la vidéo virale suivante :
https://youtu.be/1eYZr9vdGl8?si=-7L6Zf6fB64xzQUC - Deuxième LiDAR
Remarques
Le design final différera de l’actuel.
- Nous travaillons actuellement à compenser le jeu des moteurs à l’aide d’un schéma à double servomoteur ; les bras finaux auront donc une conception différente.
- Au lieu des LiDAR 3D, nous utiliserons probablement une combinaison de capteurs : des LiDAR 2D et 1D ainsi que des télémètres à ultrasons.
Connectez-vous pour laisser un commentaire.