Entwicklung des Konzeptdesigns für den mobilen Roboter
 3453
3453
Im Mai haben wir eine erste Variante des kompletten Roboterdesigns fertiggestellt. Ich möchte Schritt für Schritt zeigen, womit wir begonnen haben und was am Ende dabei herausgekommen ist.
Ausgangsanforderungen
- Es muss ein 3D-Designkonzept erstellt werden, das die technischen Spezifikationen der Konstruktion berücksichtigt.
- Das Modell soll in einer Umgebung präsentiert werden – in einem Innenraum, gesteuert von einer Person mit der VR-Brille Oculus Quest 3.
- Die Quelldateien müssen bereitgestellt werden.
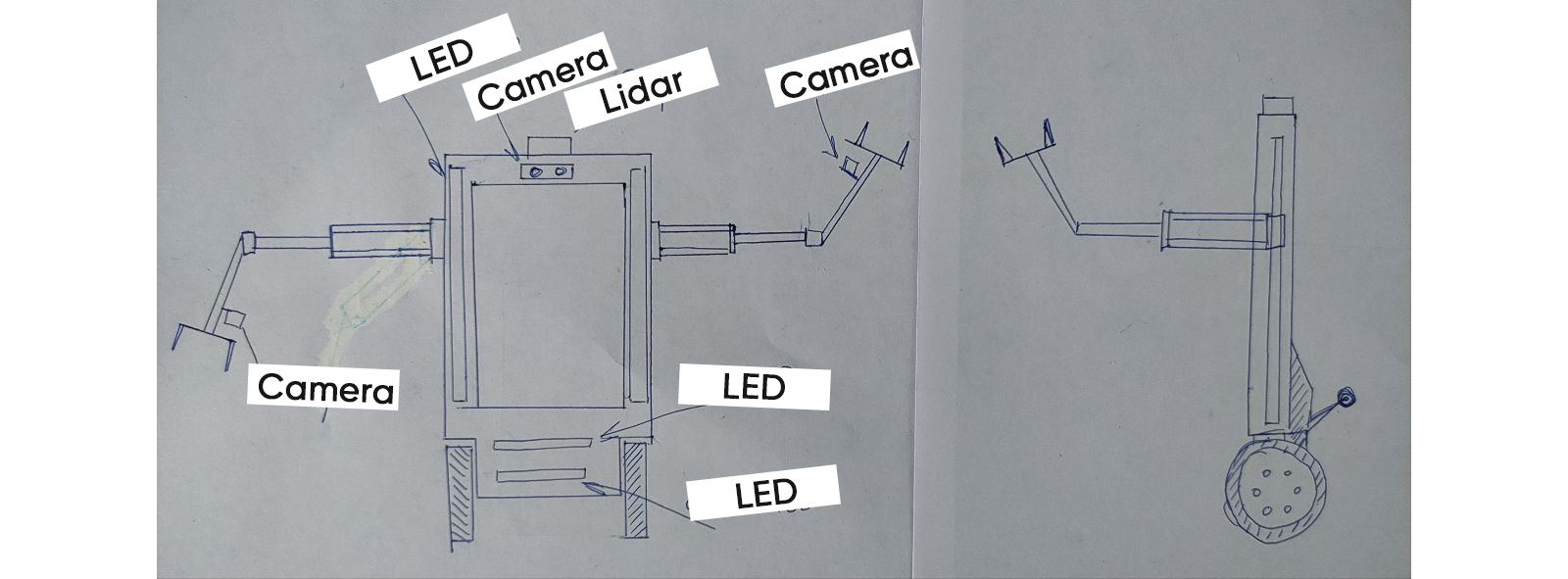
Erstes Konzept. Design von unserem Ingenieur bereitgestellt
Äußere Parameter
- Mattschwarze Farbe. Alternative Farbschemata sind denkbar: Weiß, Gelb.
- Rahmenabmessungen: 350 mm bis 400 mm × (1300 mm – 1400 mm einschließlich Radhöhe).
- Betriebsform – wie bei einem Segway.
- Die Ansicht des oberen П-förmigen Rahmens von vorn und von hinten soll identisch sein.
- Am oberen Rahmen sollen eine Tiefenkamera und ein LiDAR installiert werden.
- An den seitlichen Rahmen sollen LED-Streifen installiert werden.
- LED-Streifen sollen auch an der unteren Plattform installiert werden.
- An den Manipulatoren sollen Tiefenkameras montiert werden, ähnlich der Intel RealSense D405.
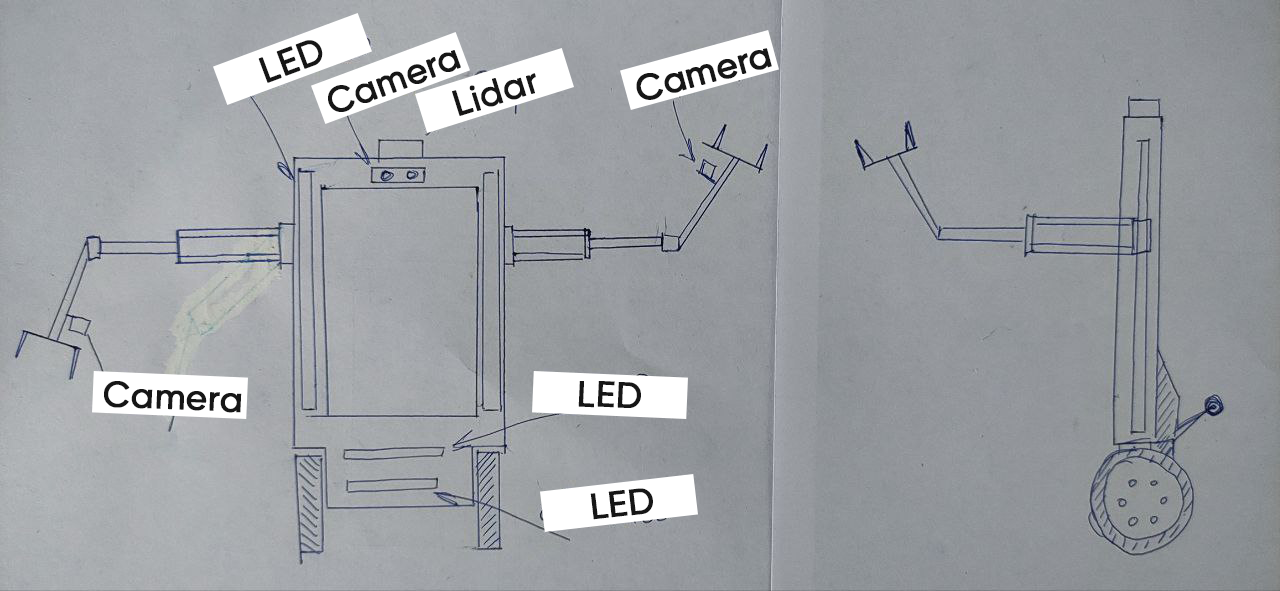
Die Skizze zeigt die Position der Sensoren
Balancemechanismus
Der Schwanz befindet sich die ganze Zeit in einer abgesenkten Position und hat eine gerade Form, die an den Buchstaben П erinnert, mit einer Rolle an jedem Ende. Die Rollen sind nicht angetrieben.
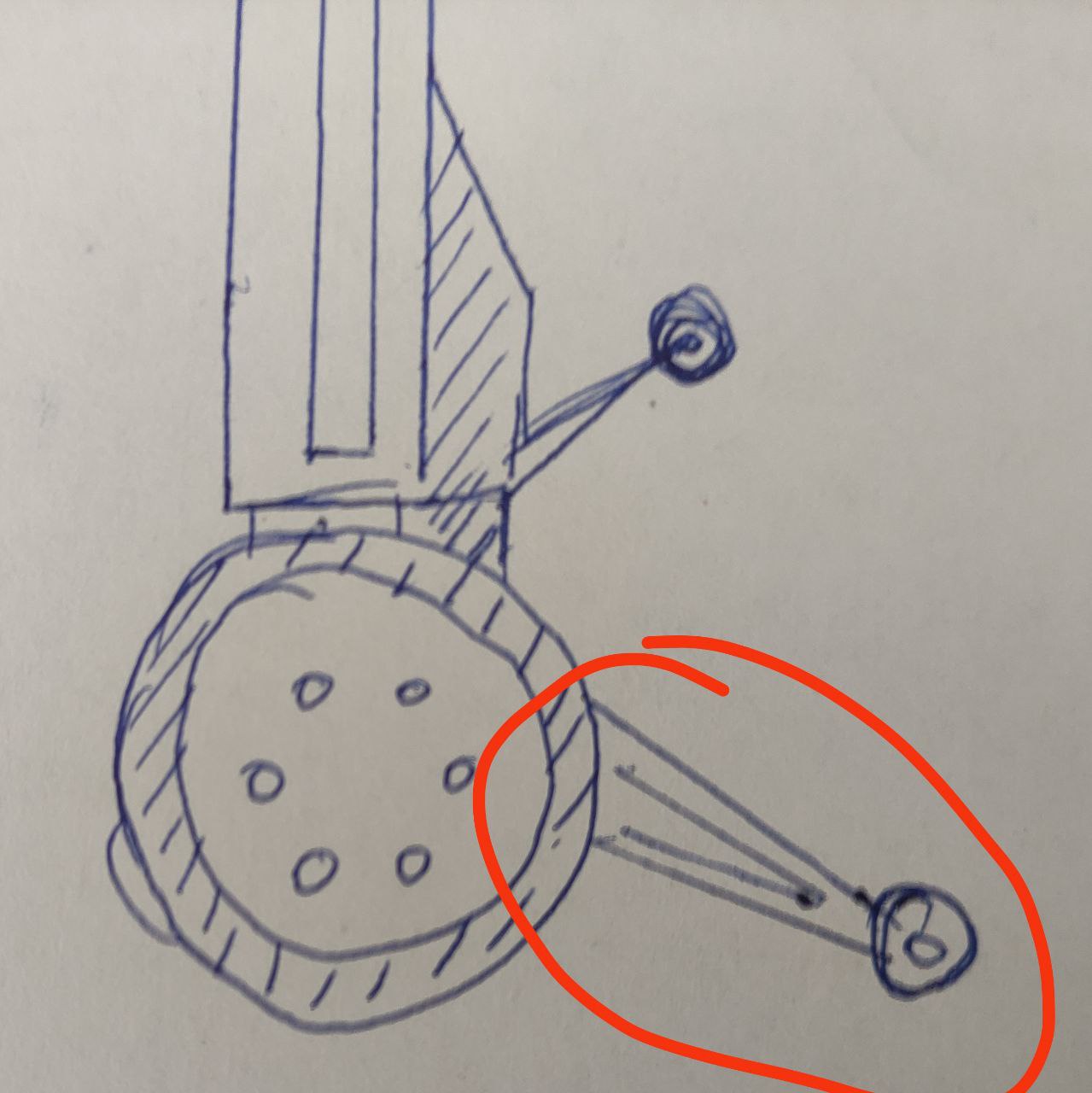
Balancemechanismus. Untere Position. Seitenansicht
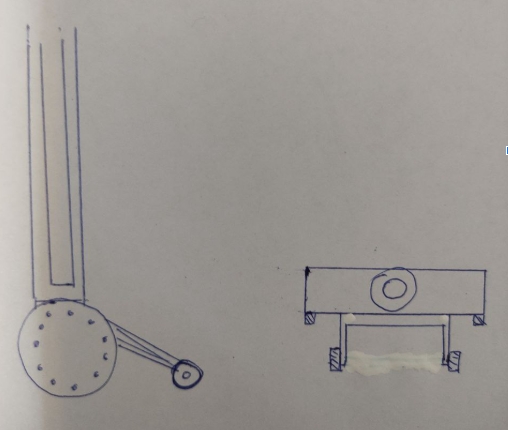
Balancemechanismus
Räder
Schwenkbare Räder, wie auf dem Bild: 3-Zoll-Industrie-Lenkrollen (klein)

Hinterräder des Roboters
Manipulatoren
- Die Manipulatoren reichen über die gesamte Höhe der Säule.
- Höhe – 1300 mm
- Länge – 650 mm
- Der Vorsprung am zweiten Gelenk muss angepasst werden; der Ingenieur legt fest, wie die Konstruktion entfernt oder nach innen verlagert wird.
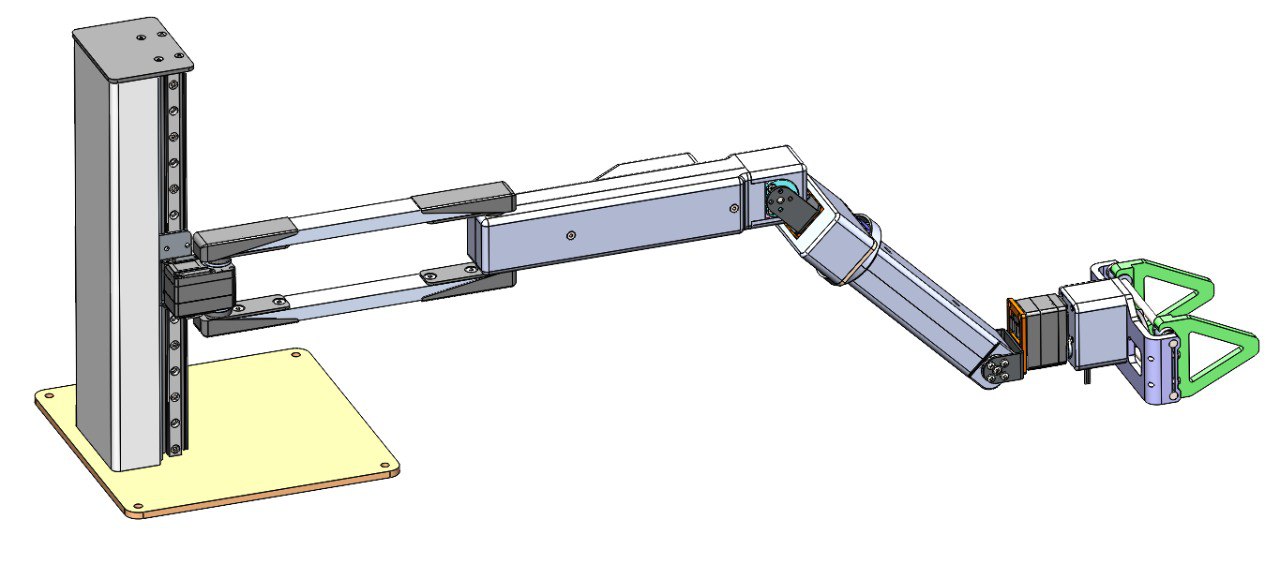
Roboterarm
Konstruktion des Greifers
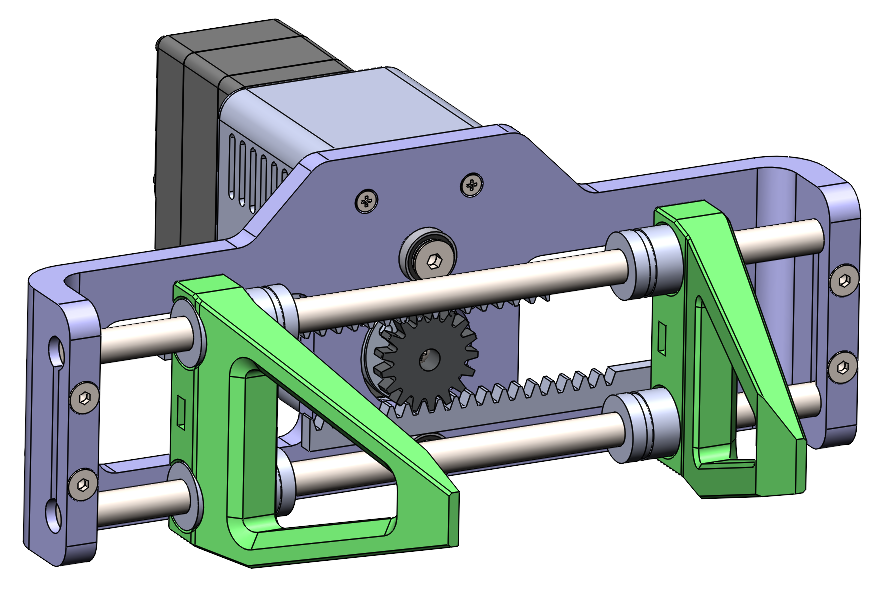
Konstruktion des Parallelgreifers
Position der Manipulatorsäulen
- Die Säulen sollen um 45 Grad gedreht werden, um eine maximale Reichweite zu gewährleisten.
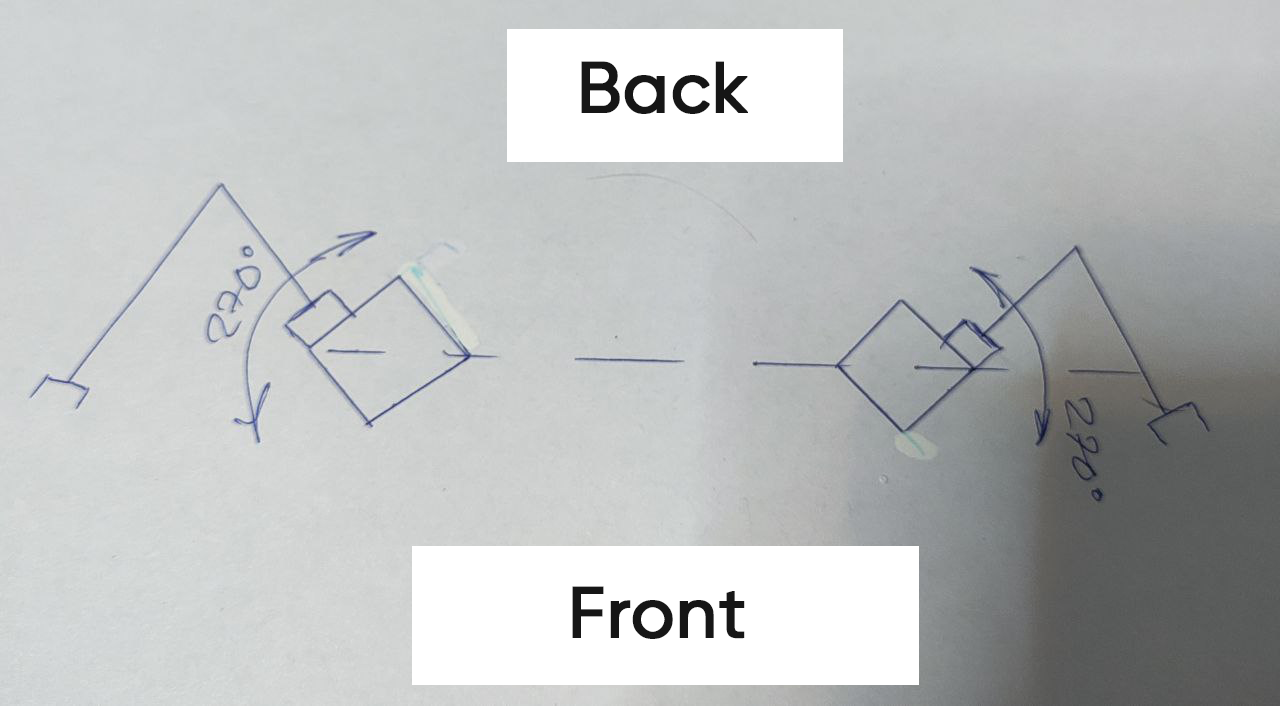
Winkel der Säulen des Hauptrahmens
Die Idee hinter diesem Neigungswinkel der Säulen ist, den Manipulatoren möglichst viel Arbeitsraum zu verschaffen.
Obere Sensoren
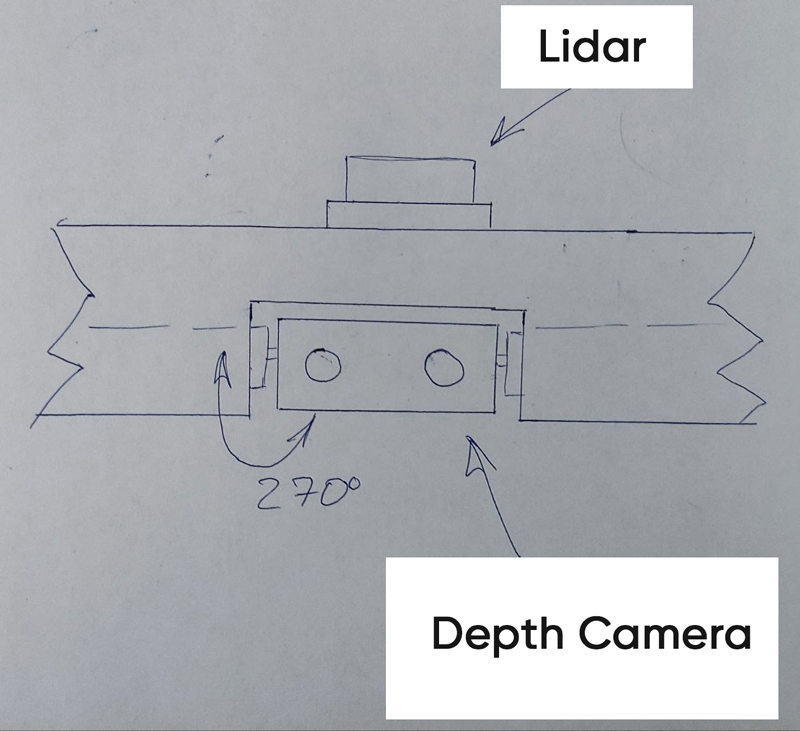
Obere Sensoren
- Die Tiefenkamera soll sich vor und zurück drehen.
- Anfangs wollte ich 3D-LiDARs verwenden, deshalb habe ich eines oben platziert.
Motoren der unteren Räder
- Größe: 8,5 Zoll
- 8,5-Zoll-Räder für Elektroroller

Vordere Motorräder
Erste Version des Hauptrahmens des Roboters

Erste Version des Hauptrahmens des Roboters. Vorderansicht

Erste Version des Hauptrahmens des Roboters. Seitenansicht

Erste Version des Hauptrahmens des Roboters. Rückansicht
In dieser Version:
- Wir haben uns für ein schweres Heck statt eines adaptiven Schwanzes entschieden. Anfangs dachte ich an einen Wassertank, denn wir benötigen etwa 20 kg Gegengewicht, um das nach vorn kippende Moment auszugleichen, wenn die Arme mit maximaler Last ausgestreckt sind.
- Der Designer hat die Farbe Orange verwendet, damit der Roboter aus großer Entfernung sichtbar ist.
Erste Version des Hauptrahmens des Roboters

Zweite Version des Hauptrahmens des Roboters. Vorderansicht

Zweite Version des Hauptrahmens des Roboters. Vorderansicht
Änderungen
- Wir sind zu Schwarz gewechselt, da hochfeste Konstruktionskunststoffe meist schwarz sind.
- Wir haben uns für eine flache Rückseite entschieden, damit künftige Nutzer etwas darauf abstellen können.
- Statt eines Wassertanks haben wir leistungsstarke Akkus gefunden, mit denen sich das nach vorn kippende Moment ausgleichen lässt.
- Der Designer hat vordere Leuchten an der mobilen Basis sowie LiDAR und Tiefenkamera oben am Rahmen ergänzt.
Neueste Version des Konzeptdesigns. Aber nicht die endgültige …

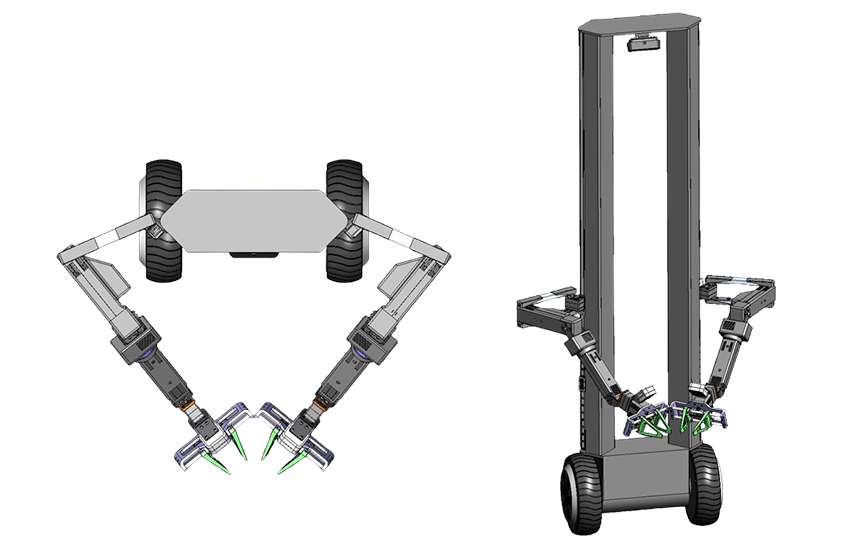
Designkonzept Roboter V0. Vorderansicht

Designkonzept Roboter V0. Rückansicht
- Der Designer hat 2 Manipulatoren ergänzt.
- Rücklicht.
- Ein Not-Aus-Knopf, um jegliches mögliche extreme Verhalten zu verhindern. Wie im folgenden viralen Video:
https://youtu.be/1eYZr9vdGl8?si=-7L6Zf6fB64xzQUC - Zweites LiDAR
Anmerkungen
Das endgültige Design wird sich vom aktuellen unterscheiden.
- Derzeit arbeiten wir an der Kompensation des Spiels der Motoren mithilfe einer Doppel-Servo-Konstruktion, sodass die endgültigen Arme eine andere Konstruktion haben werden.
- Statt 3D-LiDARs werden wir wahrscheinlich eine Kombination von Sensoren verwenden: 2D- und 1D-LiDARs sowie Ultraschall-Abstandssensoren.
Melde dich an, um einen Kommentar zu hinterlassen.