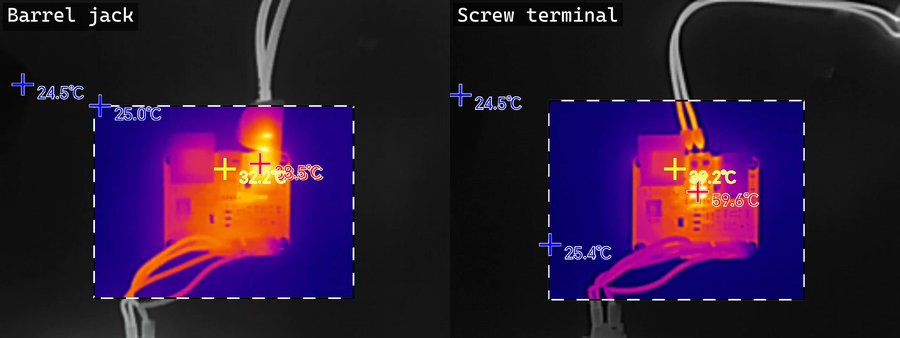
Test de cartes de commande de servos à bus série Waveshare en charge
Test empirique de charge thermique de deux cartes de commande de servos à bus série Waveshare selon ...
Boris Kotov
03 May 2026
Test empirique de charge thermique de deux cartes de commande de servos à bus série Waveshare selon ...
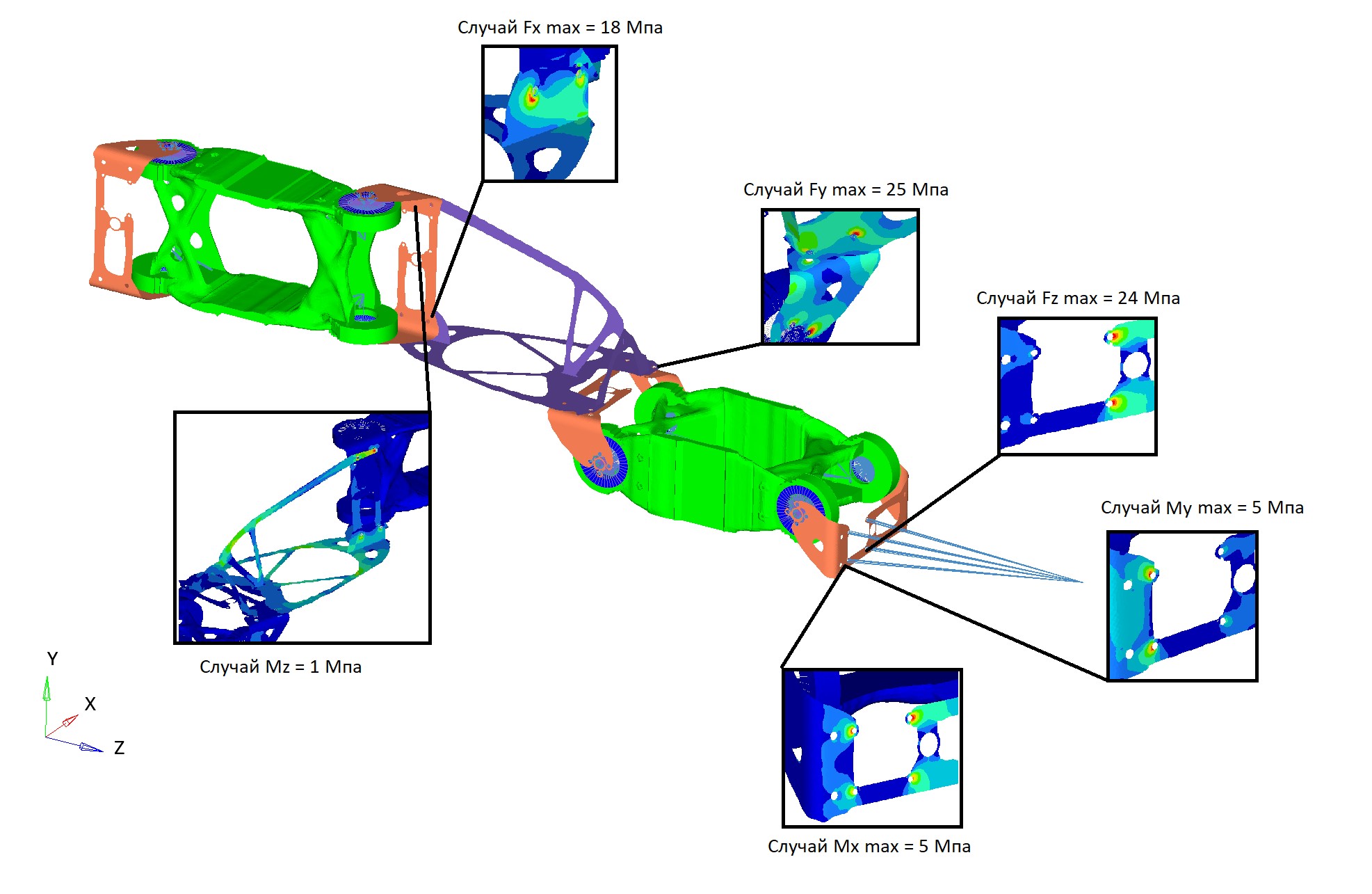
Cette étude présente l’optimisation topologique d’un manipulateur robotique à l’aide de l’algorithme...

Évaluation empirique complète du servomoteur à bus série Feetech STS3250. Les tests révèlent un écar...

Un examen détaillé du servo Feetech STS3215 — ses performances réelles, sa précision et son comporte...
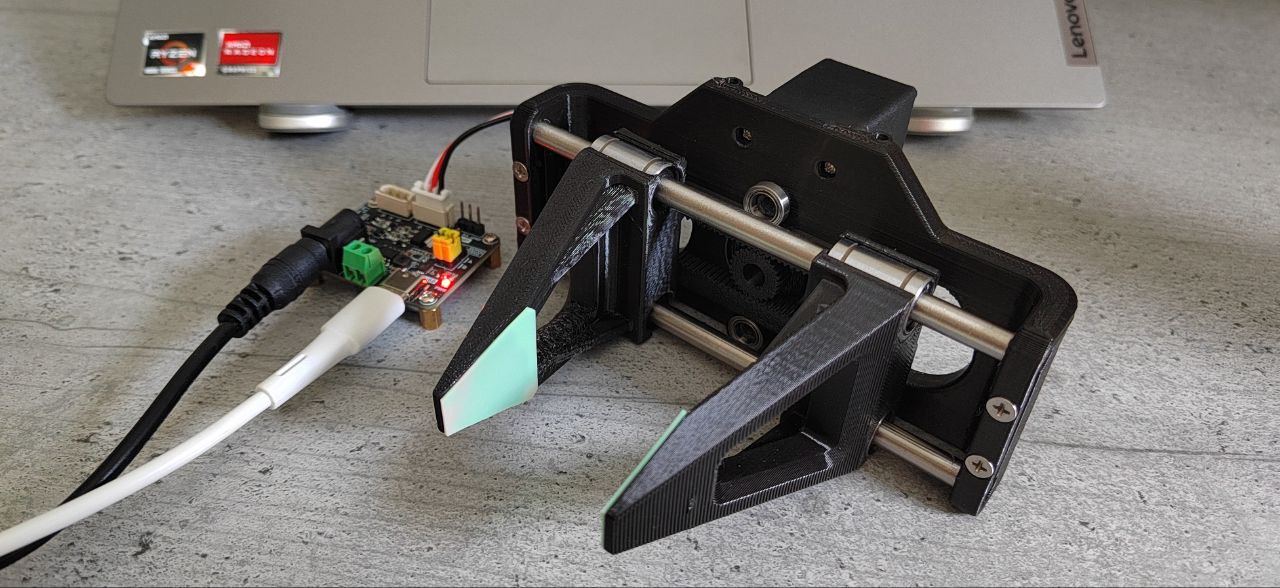
Une pince est un dispositif mécanique ou robotique conçu pour saisir, tenir, manipuler ou transporte...
Je souhaite expliquer comment s’est déroulé le choix du composant le plus important du manipulateur ...
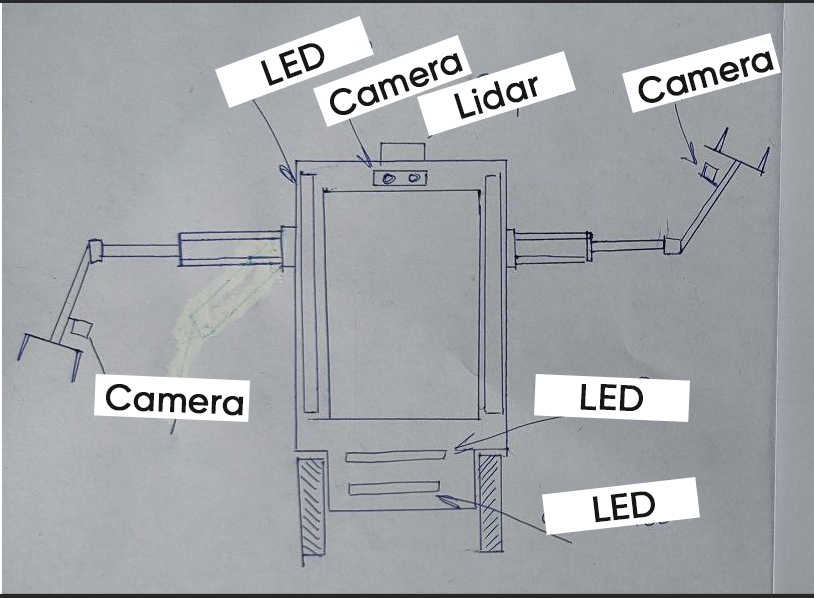
En mai, nous avons achevé la première variante du design de Robo 9, montrant son évolution du concep...
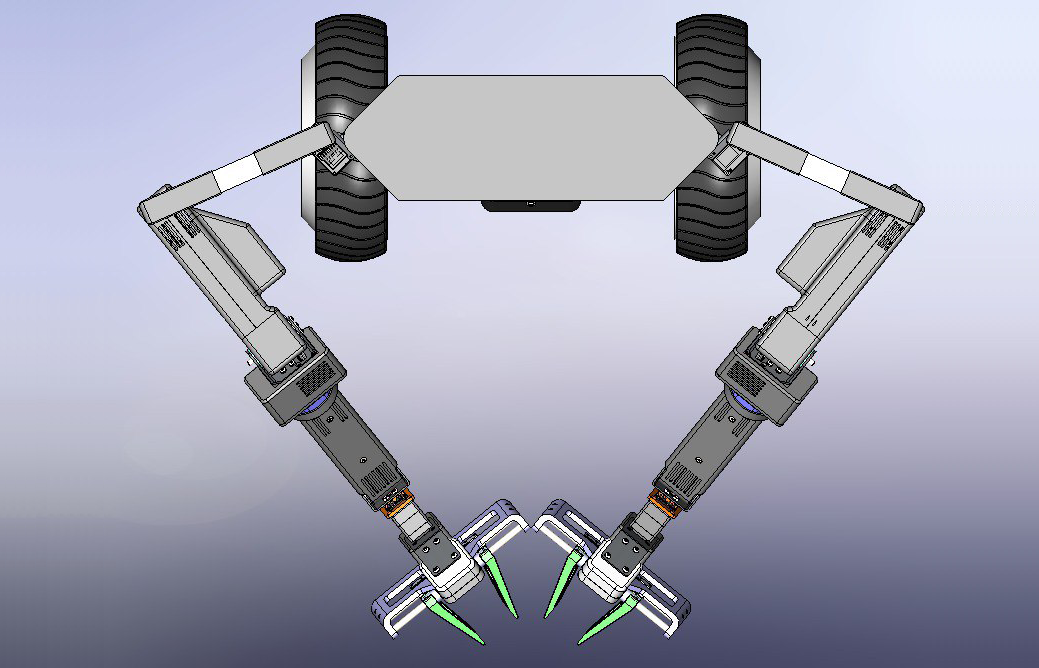
Ces deux derniers mois, nous avons fait progresser le robot de recherche Robo 9, en finalisant sa st...
ALOHA 2 bouscule ce paradigme. Ce n’est pas qu’un projet de recherche de plus : c’est un pas audacie...
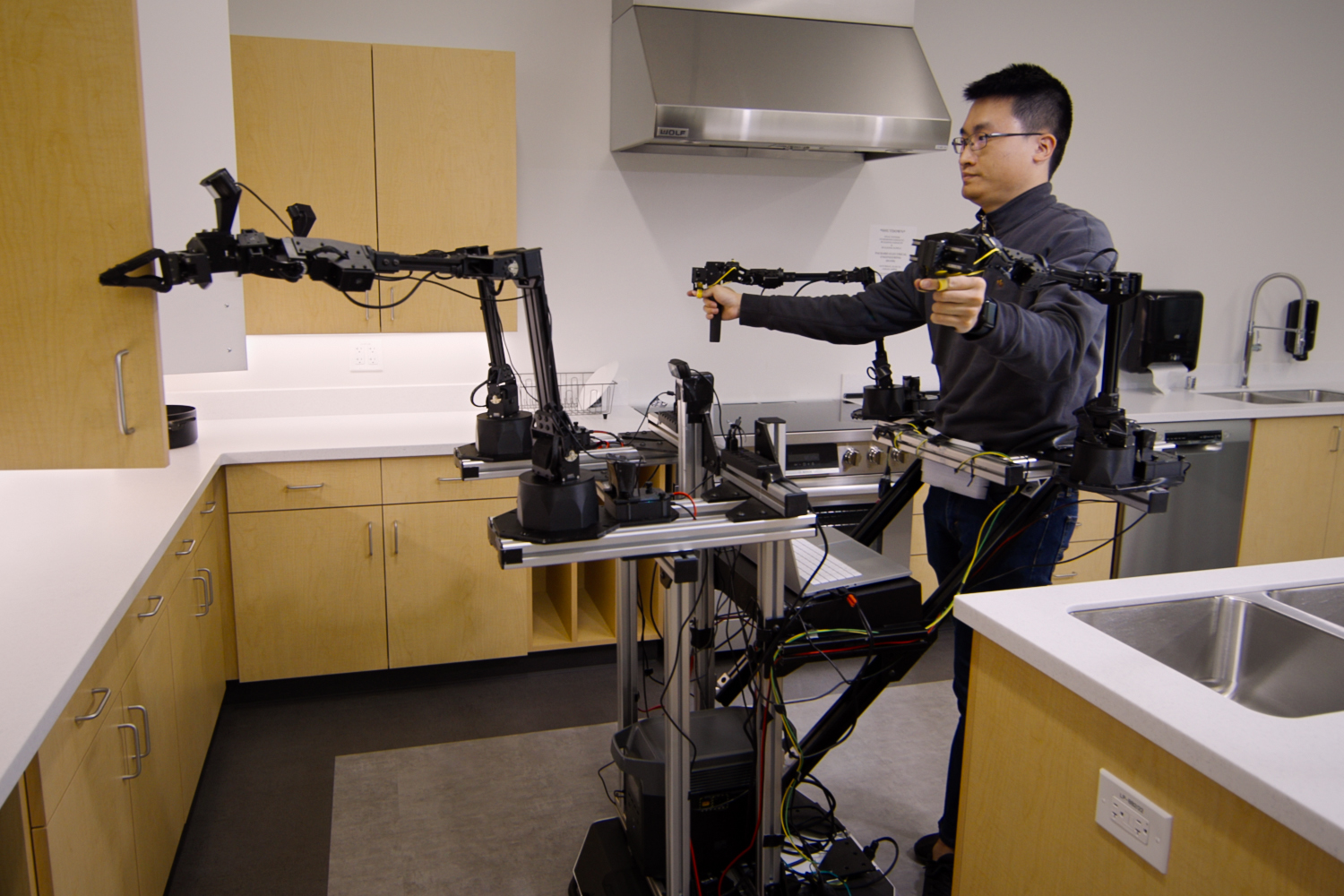
Le projet Mobile ALOHA, développé par une équipe de l’Université de Stanford en collaboration avec l...
Nous respectons votre vie privée
Nous utilisons des cookies pour améliorer votre expérience de navigation, diffuser des publicités ou des contenus personnalisés et analyser notre trafic. Vous pouvez tout accepter, refuser les cookies non essentiels ou choisir lesquels autoriser. Politique de confidentialité
Gérer les préférences de cookies
Indispensables au fonctionnement du site ; ne peuvent pas être désactivés.
Nous aident à comprendre comment les visiteurs utilisent le site.
Servent à diffuser des publicités pertinentes et à mesurer leur performance.
Activent des fonctionnalités améliorées et la personnalisation.