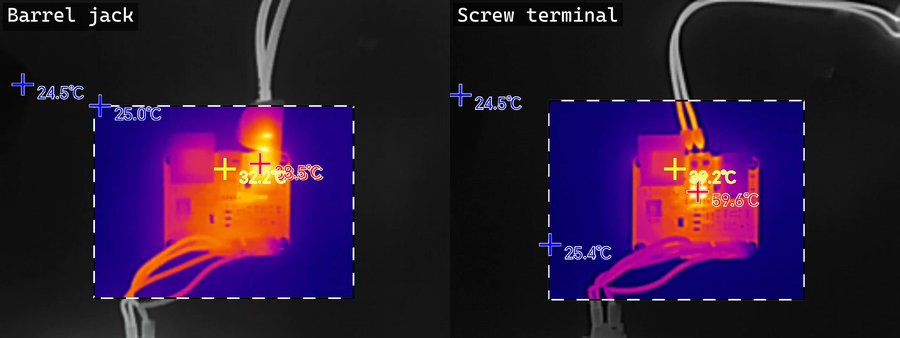
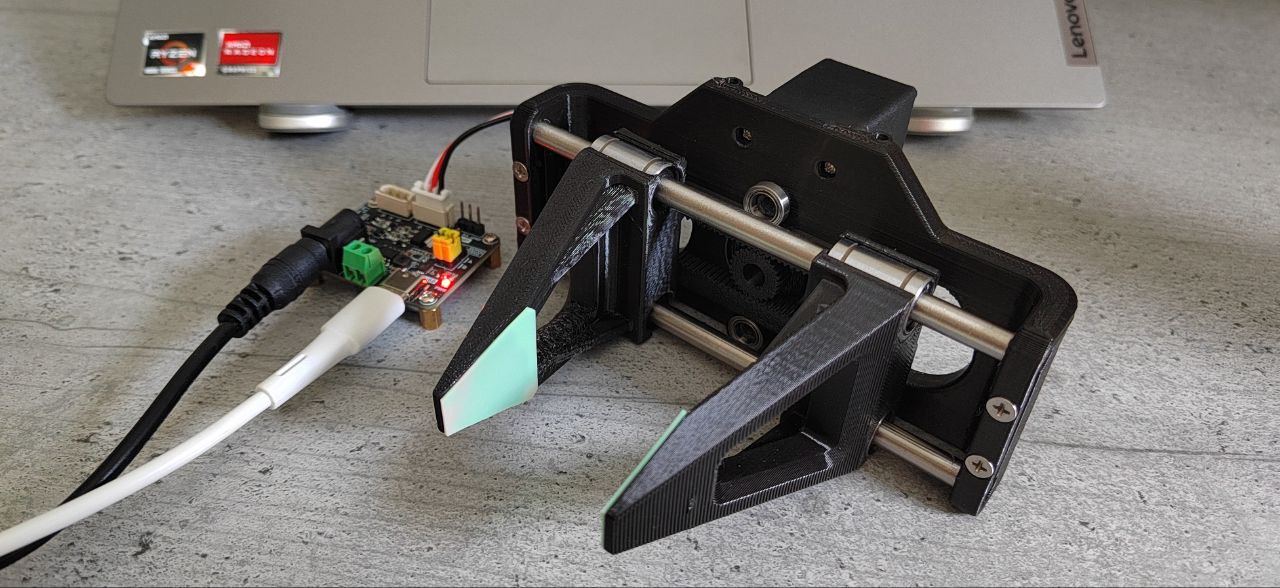
Teste de placas controladoras de servos de barramento serial Waveshare sob carga
Teste empírico de carga térmica de duas placas controladoras de servos de barramento serial Waveshar...
Boris Kotov
03 May 2026
Teste empírico de carga térmica de duas placas controladoras de servos de barramento serial Waveshar...
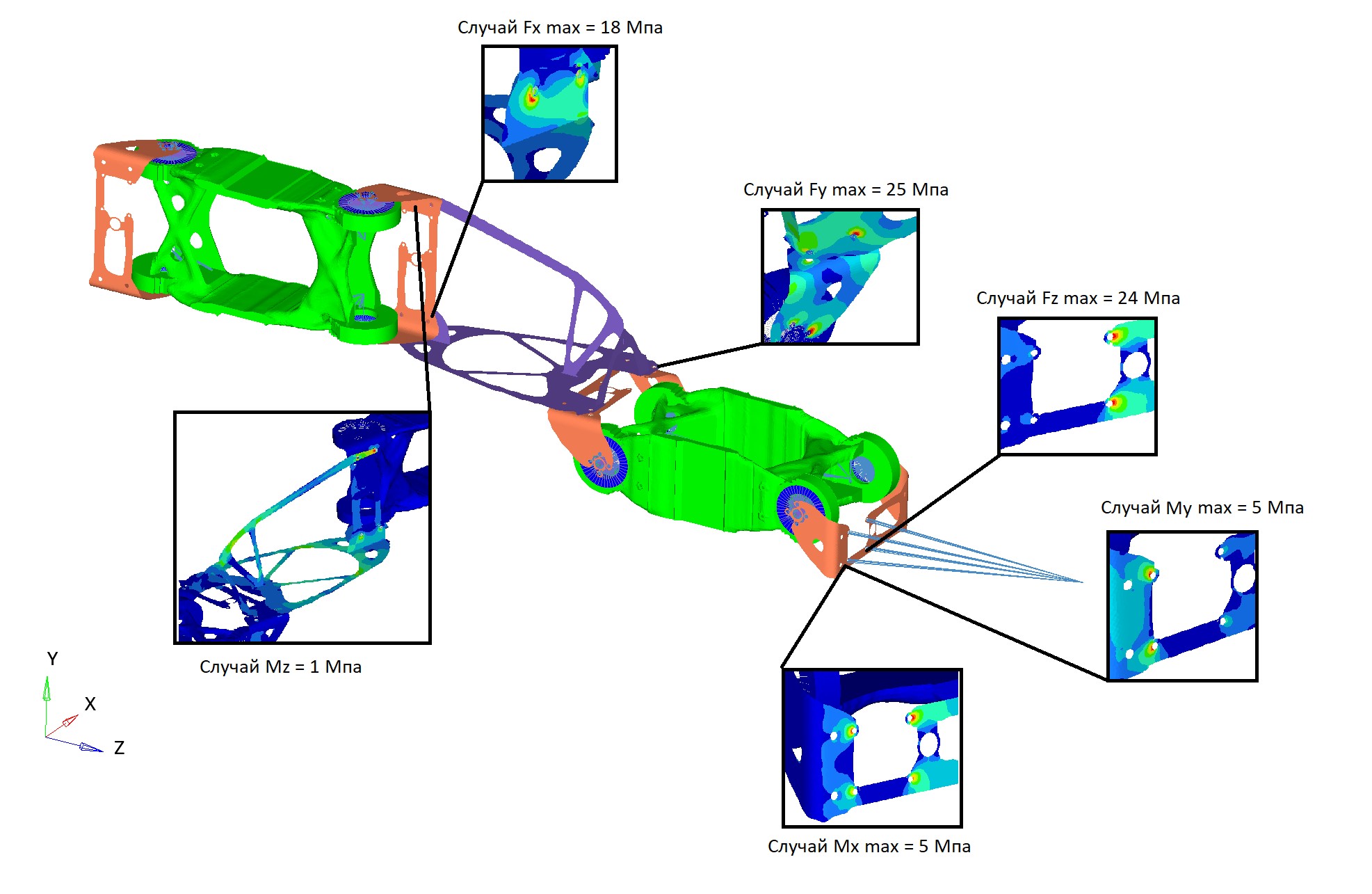
Este estudo apresenta a otimização topológica de um manipulador robótico usando o algoritmo SIMP par...

Avaliação empírica completa do servomotor de barramento serial Feetech STS3250. Os testes revelam de...

Uma análise detalhada do servo Feetech STS3215 — explorando seu desempenho real, precisão e comporta...
Uma garra é um dispositivo mecânico ou robótico projetado para agarrar, segurar, manipular ou transp...
Quero comentar como foi feita a seleção do componente mais importante do manipulador robótico: os mo...
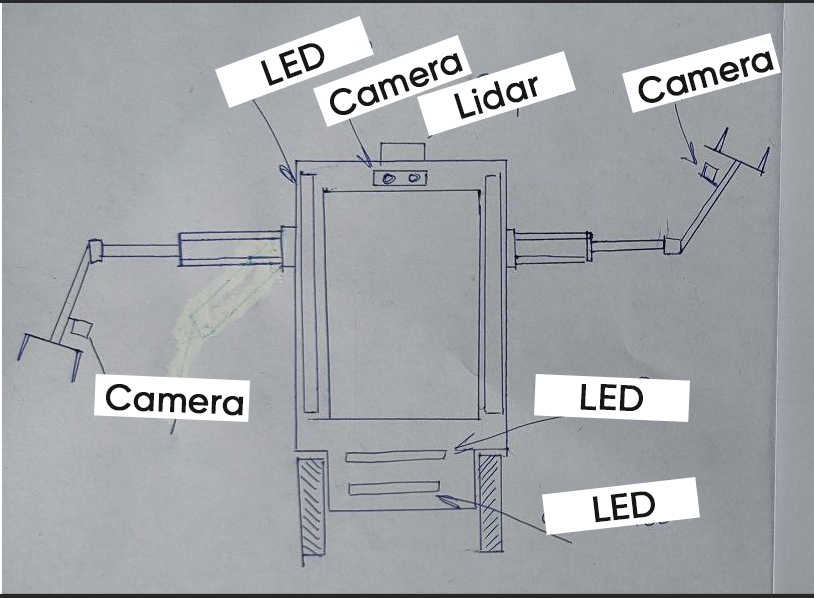
Em maio, concluímos a primeira variação do design do Robo 9, mostrando sua evolução do conceito inic...
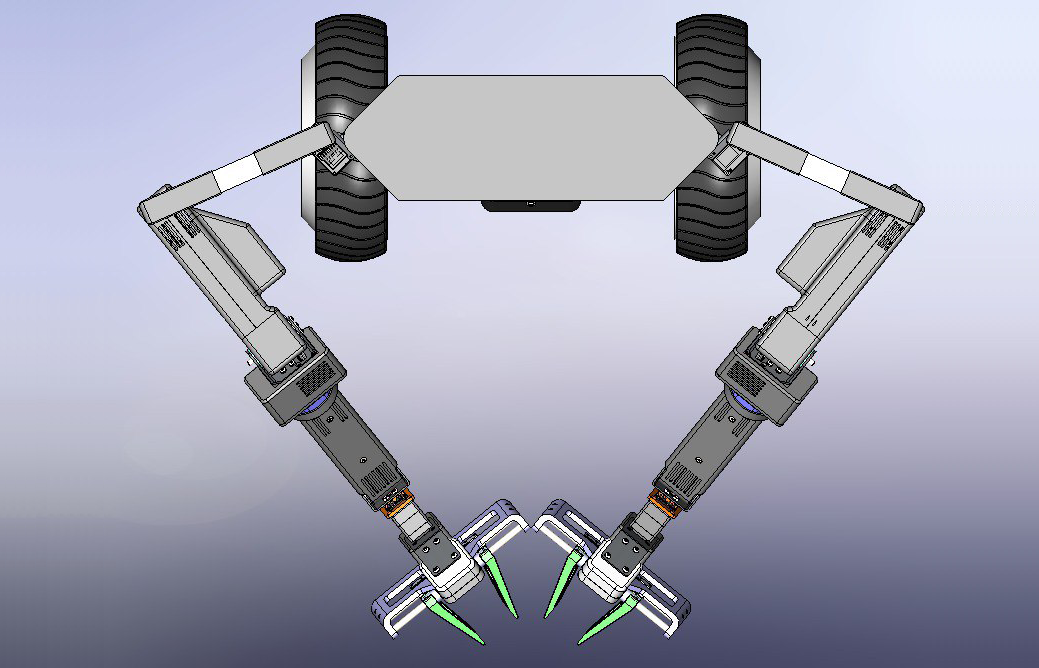
Nos últimos dois meses, avançamos com o robô de pesquisa Robo 9, finalizando sua estrutura e os dois...
O ALOHA 2 rompe esse paradigma. Não é apenas mais um projeto de pesquisa — é um passo ousado rumo à ...
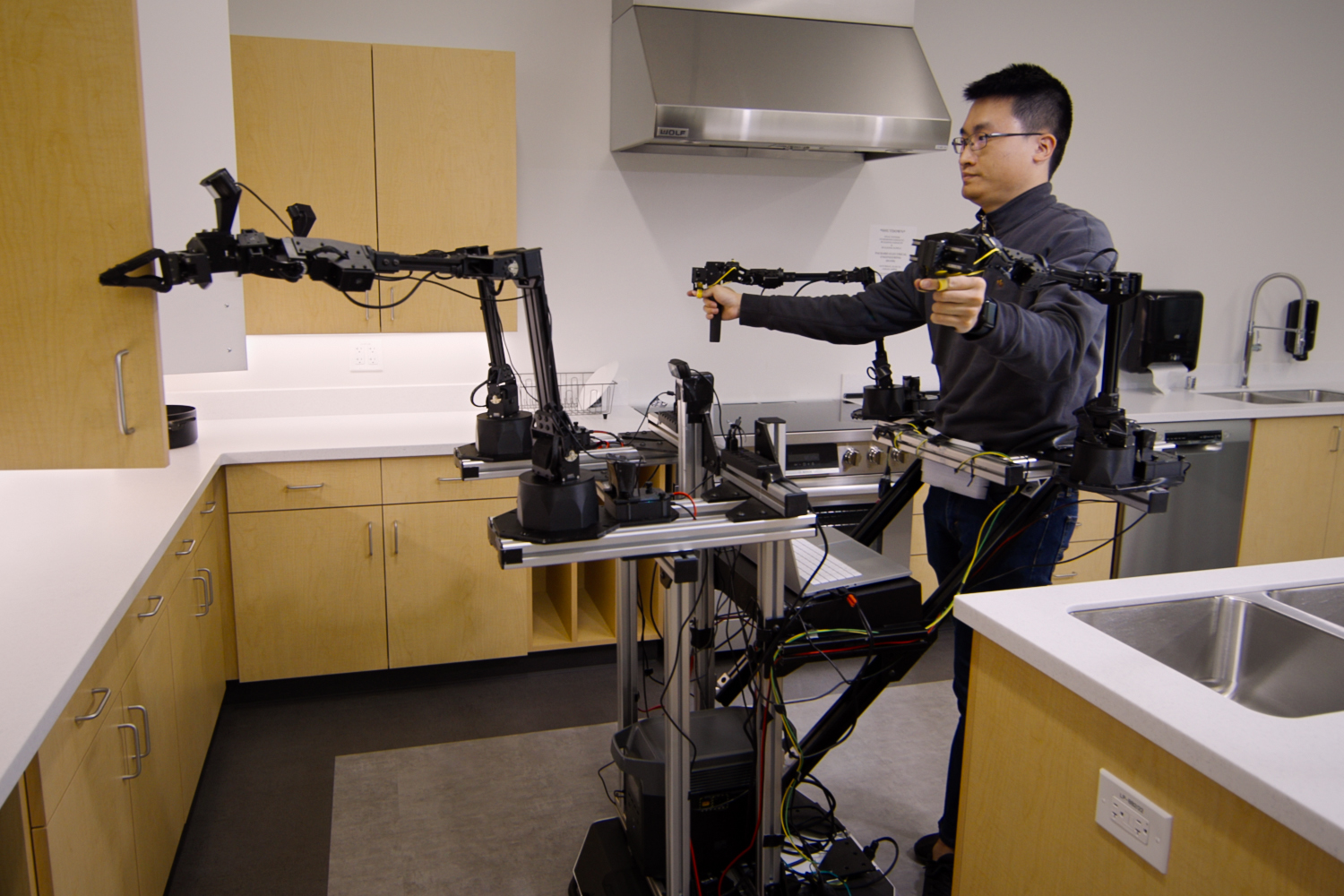
O projeto Mobile ALOHA, desenvolvido por uma equipe da Universidade de Stanford em colaboração com o...
Valorizamos sua privacidade
Usamos cookies para melhorar sua experiência de navegação, exibir anúncios ou conteúdo personalizados e analisar nosso tráfego. Você pode aceitar todos, rejeitar os não essenciais ou escolher quais permitir. Política de Privacidade
Gerenciar preferências de cookies
Essenciais para o funcionamento do site; não podem ser desativados.
Ajudam-nos a entender como os visitantes usam o site.
Usados para exibir anúncios relevantes e medir seu desempenho.
Habilitam funcionalidades aprimoradas e personalização.