Novidades no desenvolvimento do robô educacional
 2021
2021
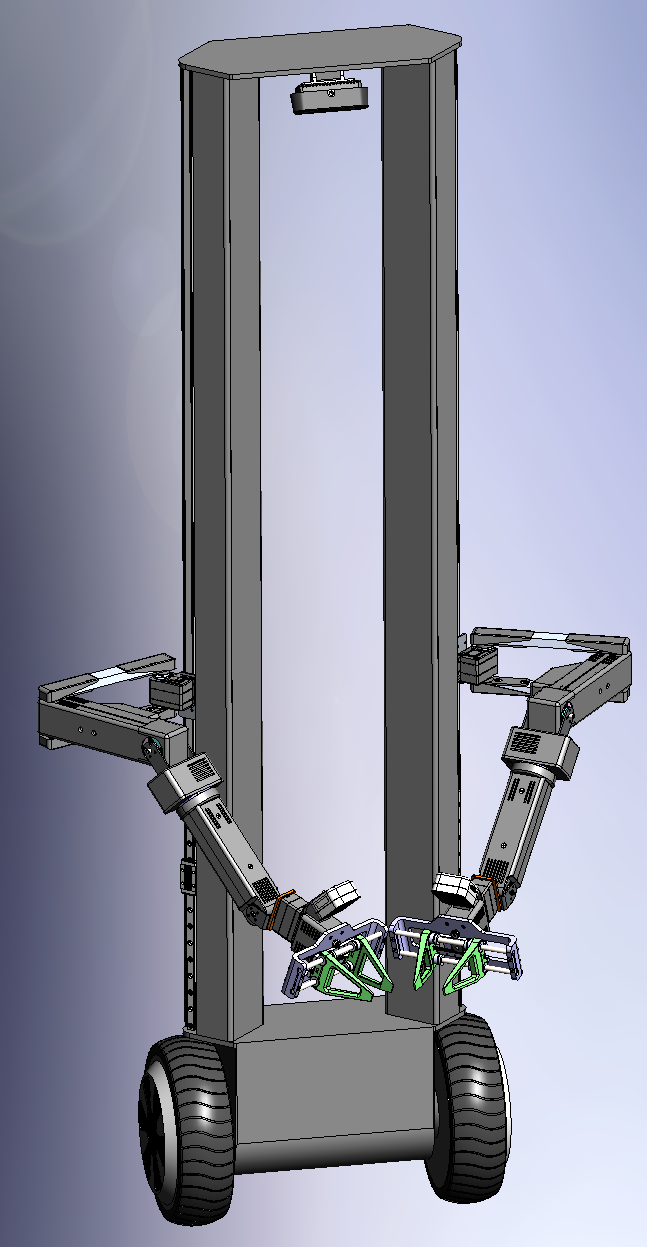
Gostaria de compartilhar o progresso dos últimos dois meses. Concluímos a maior parte do trabalho de projeto dos manipuladores e finalizamos a estrutura principal do robô.
Garras
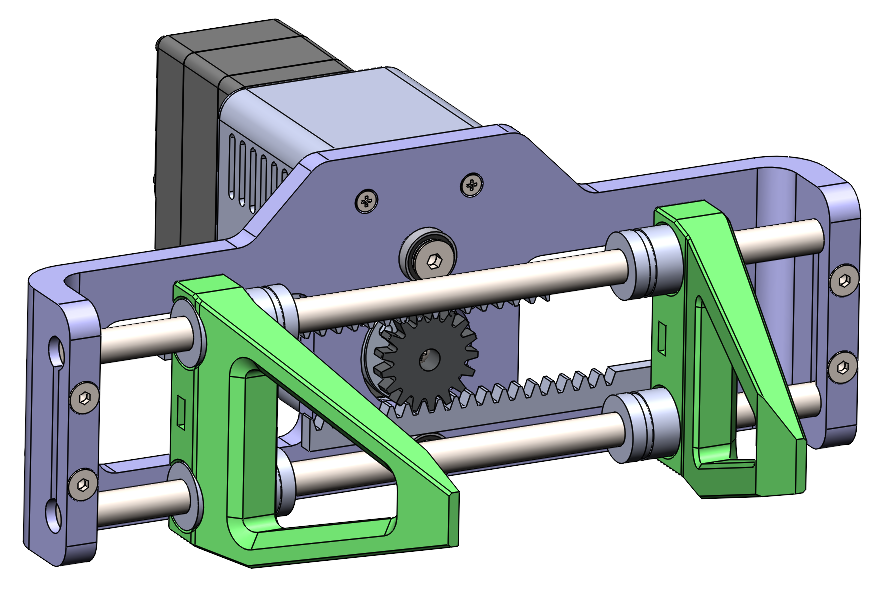
Projeto de garra paralela
Depois de considerar várias opções, decidimos manter um projeto de garra paralela, pois é o mais leve, o mais fácil de produzir e capaz de manipular uma variedade de objetos com formas diferentes.
Manipuladores
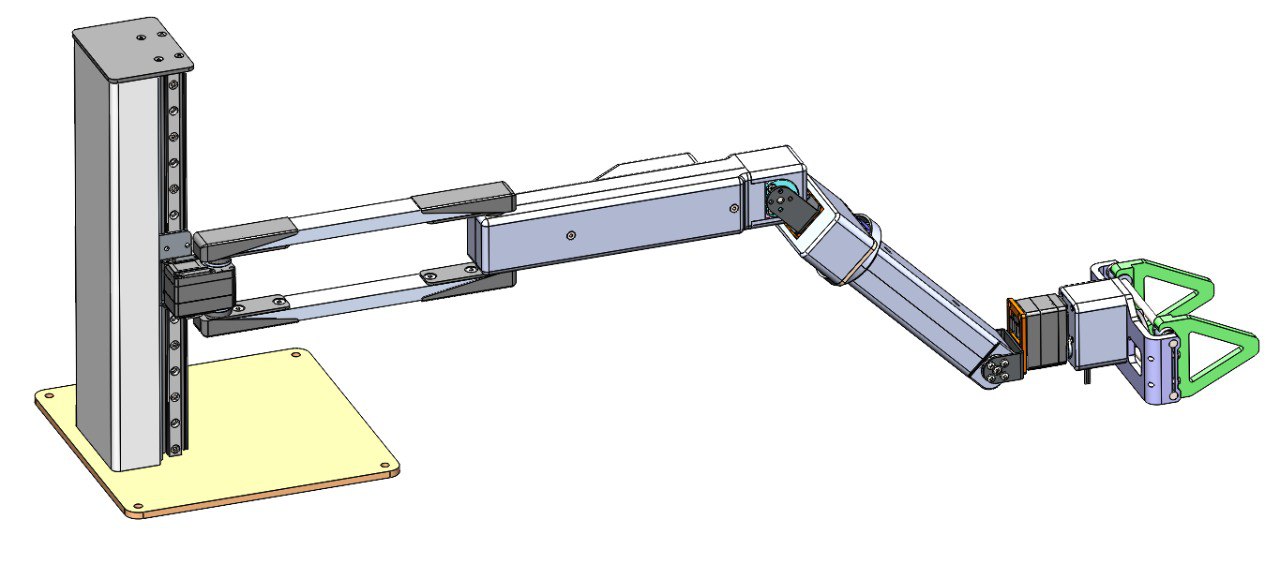
Braço do robô
- Decidimos usar um design semi-pórtico e semi-serial para o manipulador. Isso nos permite manter um equilíbrio entre o torque exigido dos motores e o número de graus de liberdade.
- Para os motores, escolhemos os servomotores Feetech 3215 e Feetech 3250, pois são leves, de baixo custo e oferecem alto torque junto com encoders magnéticos.
- O comprimento do manipulador será de aproximadamente 650 mm, e a capacidade de carga estimada fica entre 1,5 e 3 kg.
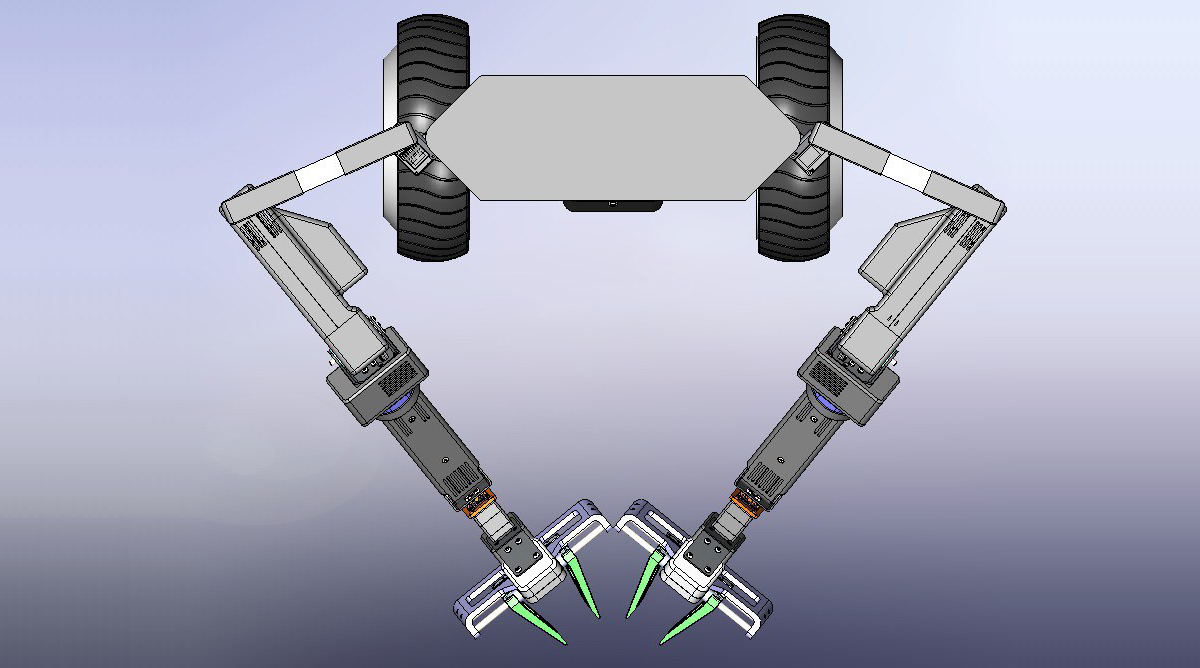
As principais características atuais do robô são
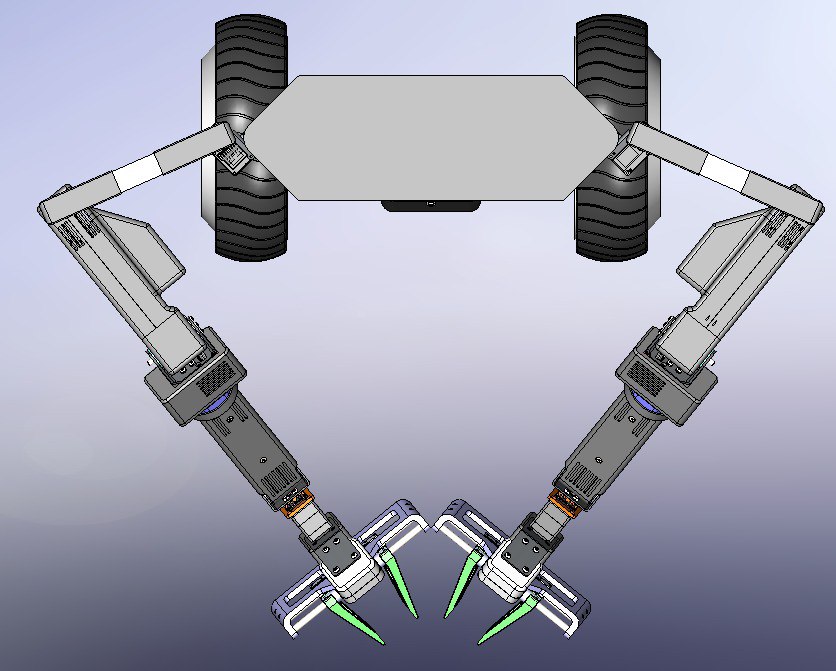
– Tipo de locomoção — semelhante a um Segway.
– Capacidade de elevar os manipuladores até uma altura de 1400 mm.
– Capacidade de carga de cada manipulador — 1500 g.
– Comprimento dos manipuladores — 650 mm.
– A direção escolhida para a primeira versão do robô é um robô de pesquisa para escolas, universidades e laboratórios.
Em maio, pretendo publicar um render do conceito do futuro robô, que refletirá de perto o design final.
esse robo educacional vai ser perfeito pra escola onde dou aula, anciosos por aqui!!!
qual faixa etaria vcs estao mirando com esse projeto?
Estamos mirando do ensino fundamental II até o universitário, com níveis de complexidade ajustáveis. A base é a mesma, mas o material e os desafios escalam conforme a idade e a experiência.
Muito obrigado pela explicação.
Acompanhando de perto o desenvolvimento. A escolha de manter a plataforma programável em blocos e em Python é acertada, pois acompanha o aluno do iniciante ao avançado.
vai ter material didatico/curriculo pronto junto com o robô?
Sim, estamos desenvolvendo um currículo completo com lições graduais e projetos práticos junto com o robô. A ideia é que o professor possa adotar sem precisar montar tudo do zero.
Era exatamente o que eu precisava.