Обновление по разработке образовательного робота
 2141
2141
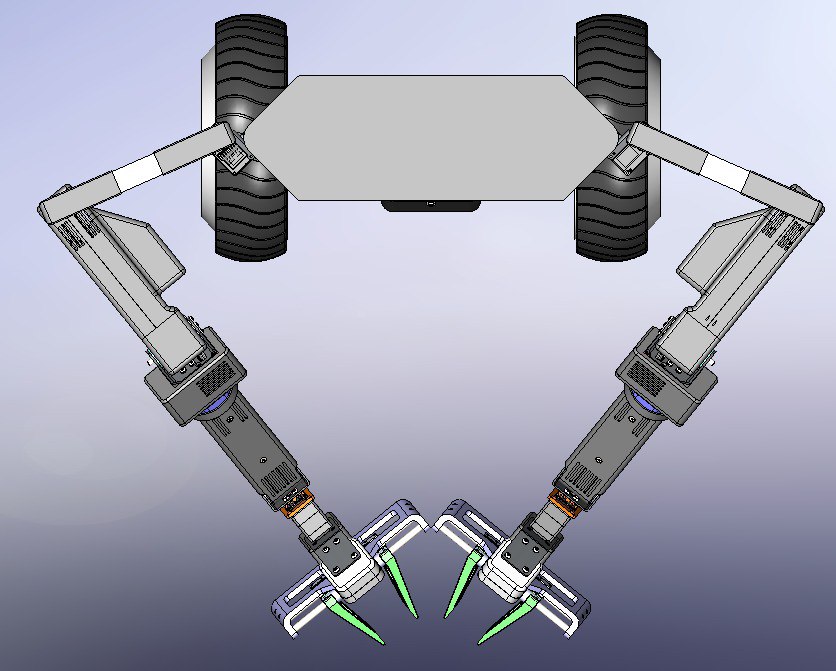
Хочу поделиться прогрессом за последние два месяца. Мы завершили большую часть конструкторских работ по манипуляторам и финализировали основную структуру робота.
Захваты
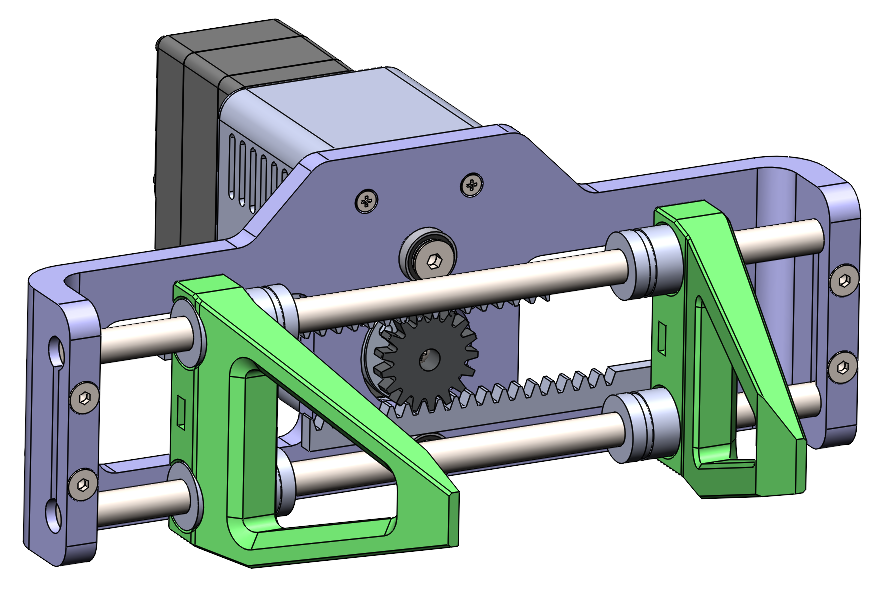
Конструкция параллельного захвата
Рассмотрев разные варианты, мы остановились на конструкции параллельного захвата: он самый лёгкий, проще всего в производстве и способен работать с разнообразными объектами различной формы.
Манипуляторы
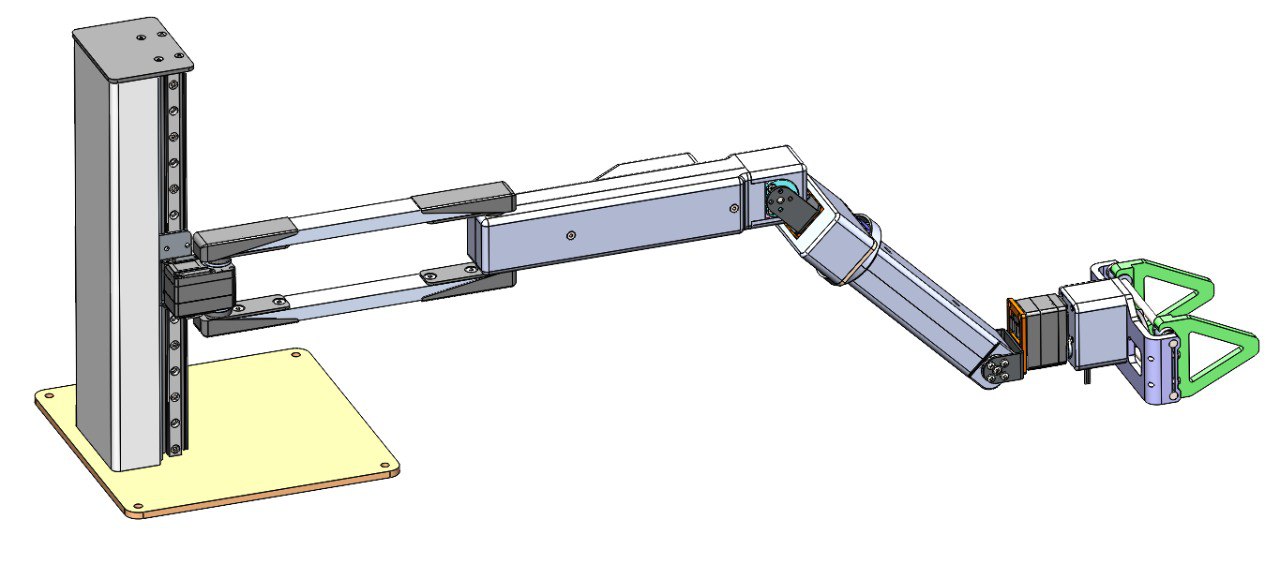
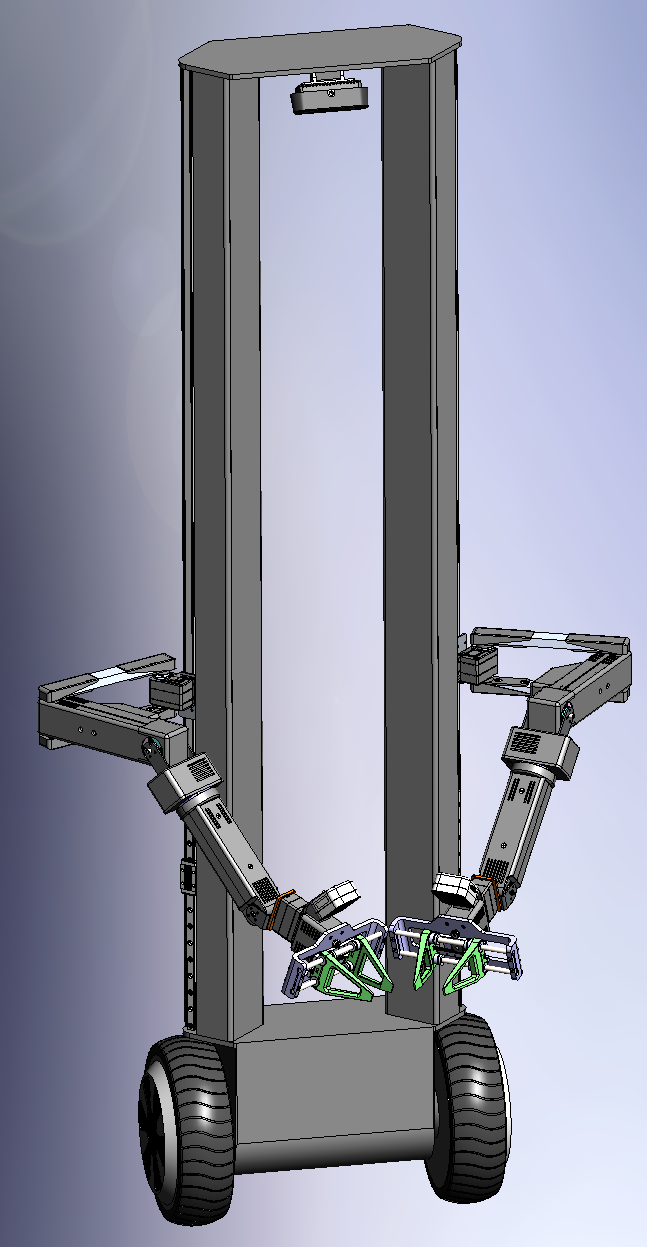
Манипулятор робота
- Для манипулятора мы выбрали полупортальную, полупоследовательную схему. Это позволяет сохранить баланс между требуемым крутящим моментом двигателей и числом степеней свободы.
- В качестве приводов мы выбрали сервомоторы Feetech 3215 и Feetech 3250: они лёгкие, недорогие и обеспечивают высокий крутящий момент вместе с магнитными энкодерами.
- Длина манипулятора составит около 650 мм, а расчётная грузоподъёмность — от 1,5 до 3 кг.
Текущие основные характеристики робота
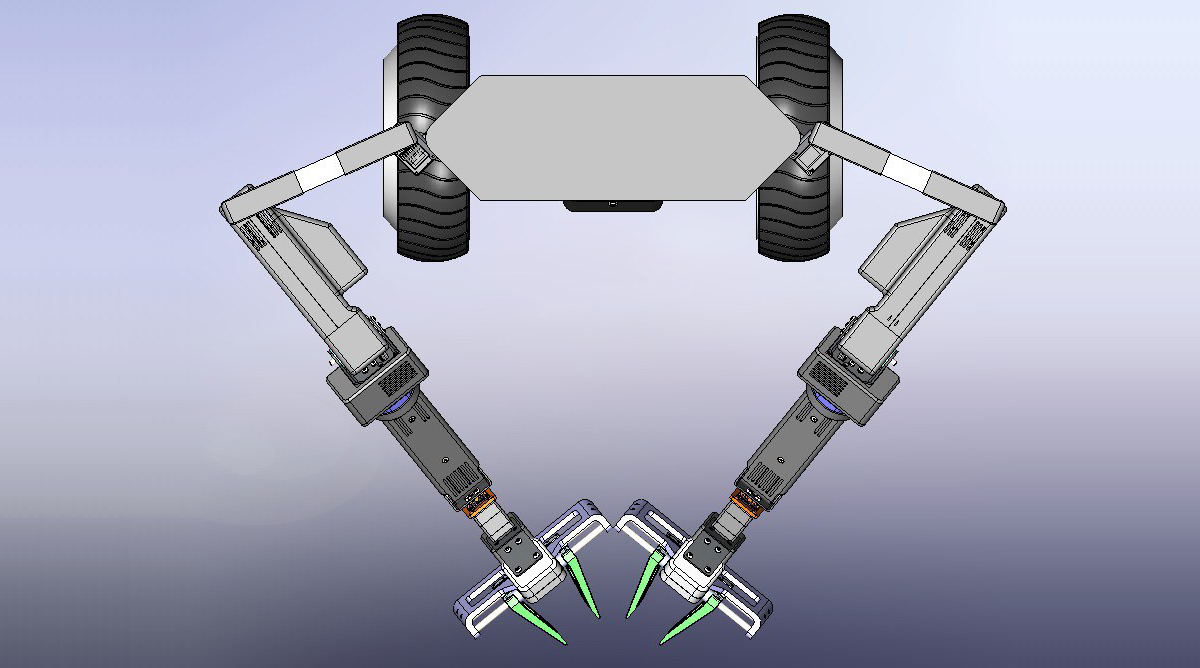
– Тип передвижения — аналогично Segway.
– Возможность поднимать манипуляторы на высоту до 1400 мм.
– Грузоподъёмность каждого манипулятора — 1500 г.
– Длина манипуляторов — 650 мм.
– Выбранное направление для первой версии робота — исследовательский робот для школ, университетов и лабораторий.
В мае я планирую опубликовать рендер концепта будущего робота, который близко отразит итоговый дизайн.
ждём в наши школы!
приятно видеть что проект для образования делают серьёзно а не просто перекрашенный конструктор, для кружка важно чтобы дети могли реально программировать и видеть результат а не собирать готовое по схеме, надеюсь упор будет именно на это
веду робототехнику в школе несколько лет и главная боль это надёжность техники, дети ломают всё, поэтому очень прошу при разработке думать не только о возможностях но и о ремонтопригодности, чтобы сломанный узел можно было быстро заменить силами учителя а не отправлять весь робот в сервис, и желательно чтобы запчасти были доступные и недорогие, а ещё критично нормальное русскоязычное ПО и документация потому что не у всех преподавателей есть время разбираться в англоязычных мануалах, если эти моменты учтёте цены вам не будет в наших условиях
А будет ли методичка для учителей или только сам робот?
Да, мы готовим комплект методических материалов и поурочные сценарии вместе с роботом. Без методики железо в школе работает плохо, это для нас приоритет.