Neues zur Entwicklung des Bildungsroboters
 2031
2031
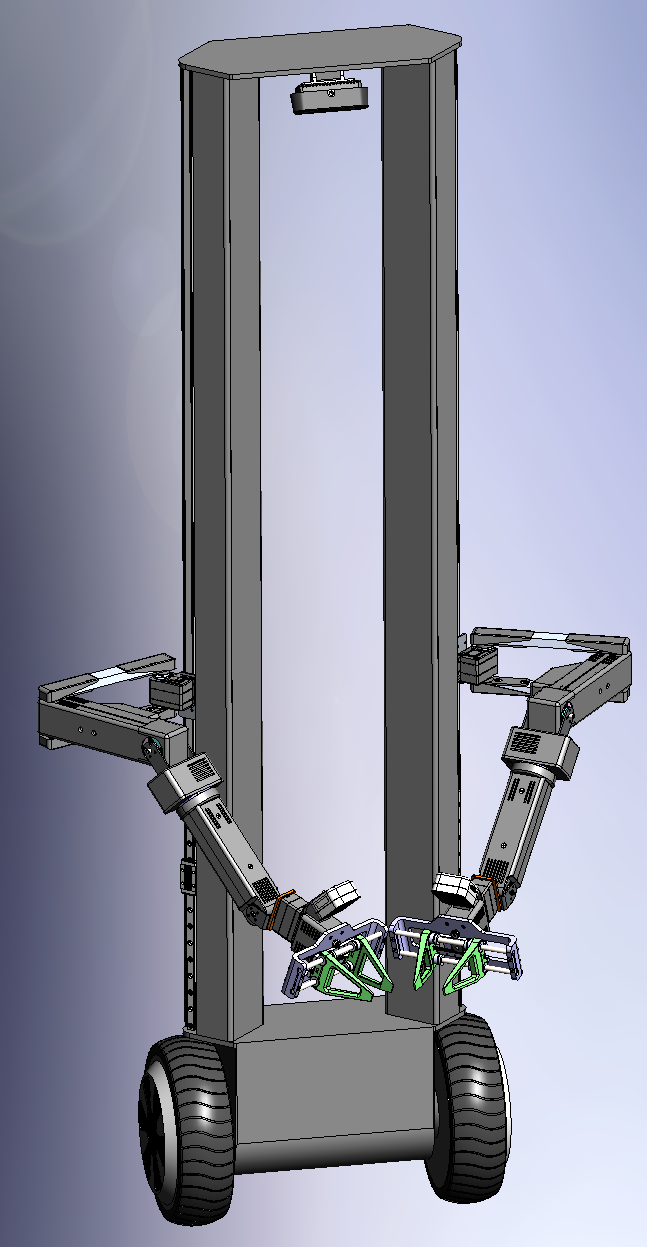
Ich möchte den Fortschritt der letzten beiden Monate mit Ihnen teilen. Wir haben den Großteil der Konstruktionsarbeiten an den Manipulatoren abgeschlossen und die Grundstruktur des Roboters finalisiert.
Greifer
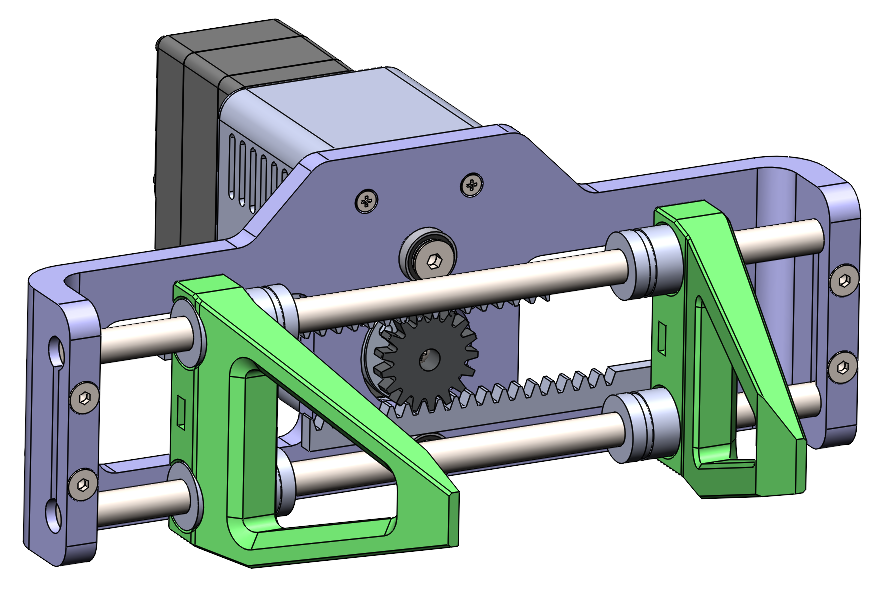
Konstruktion des Parallelgreifers
Nach Abwägung verschiedener Optionen haben wir uns für die Konstruktion eines Parallelgreifers entschieden: Er ist am leichtesten, am einfachsten zu fertigen und in der Lage, eine Vielzahl unterschiedlich geformter Objekte zu handhaben.
Manipulatoren
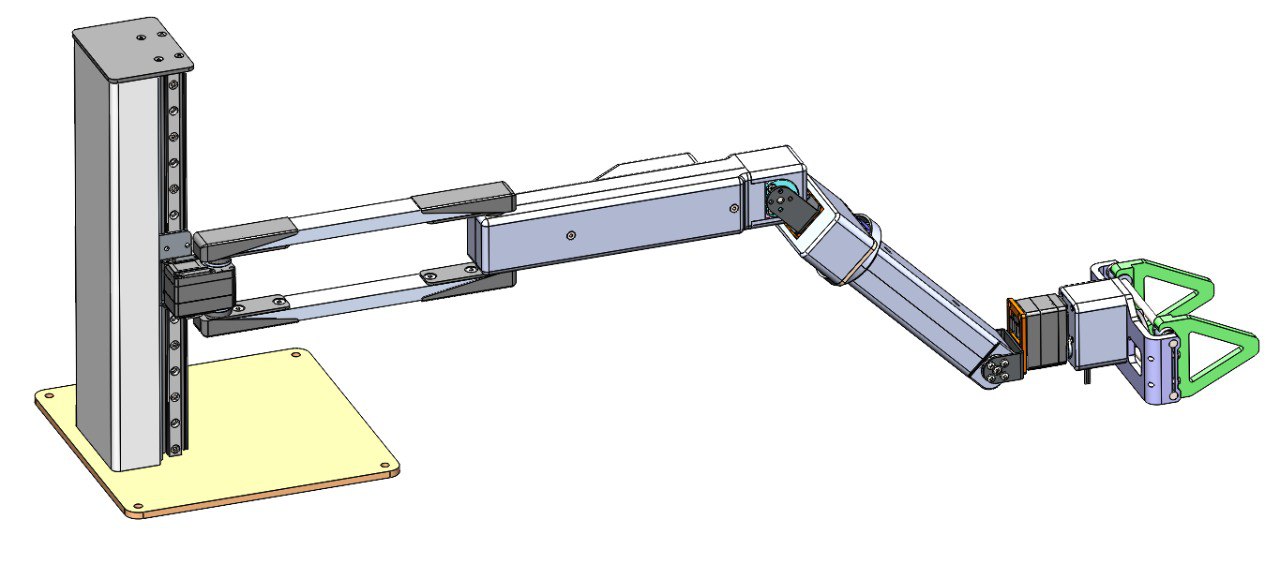
Roboterarm
- Für den Manipulator haben wir uns für eine teils portalartige, teils serielle Bauweise entschieden. Dadurch lässt sich ein Gleichgewicht zwischen dem benötigten Drehmoment der Motoren und der Anzahl der Freiheitsgrade wahren.
- Als Antriebe haben wir die Servomotoren Feetech 3215 und Feetech 3250 gewählt: Sie sind leicht, kostengünstig und bieten ein hohes Drehmoment zusammen mit magnetischen Encodern.
- Die Länge des Manipulators wird etwa 650 mm betragen, und die geschätzte Traglast liegt zwischen 1,5 und 3 kg.
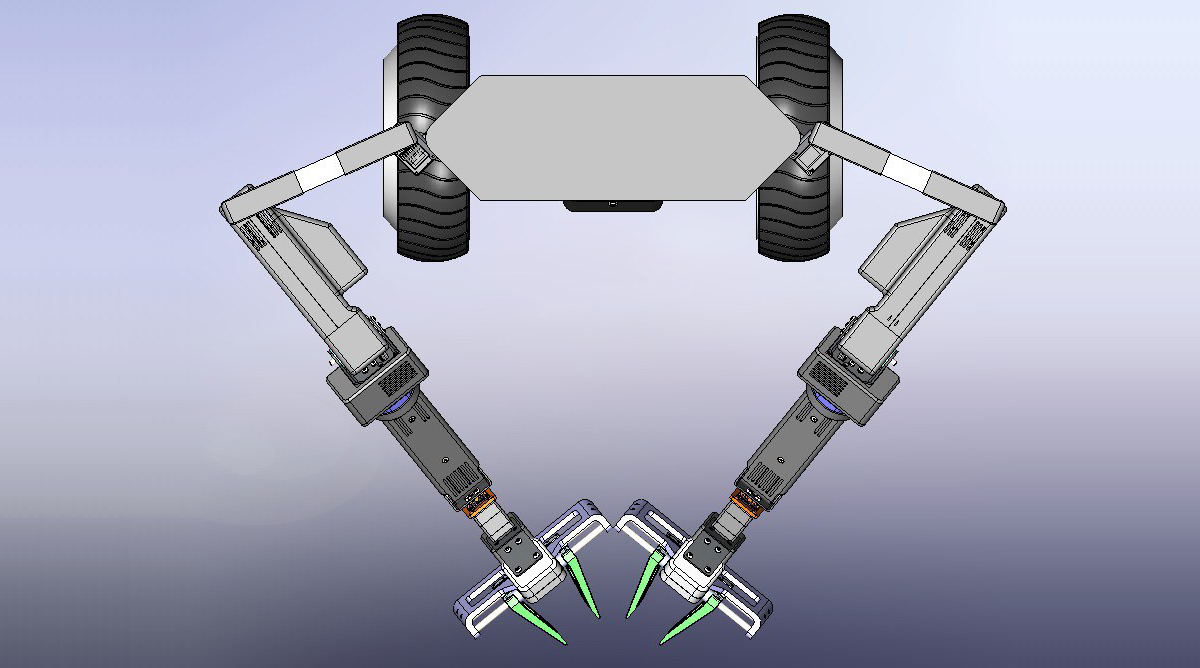
Die aktuellen Hauptmerkmale des Roboters sind
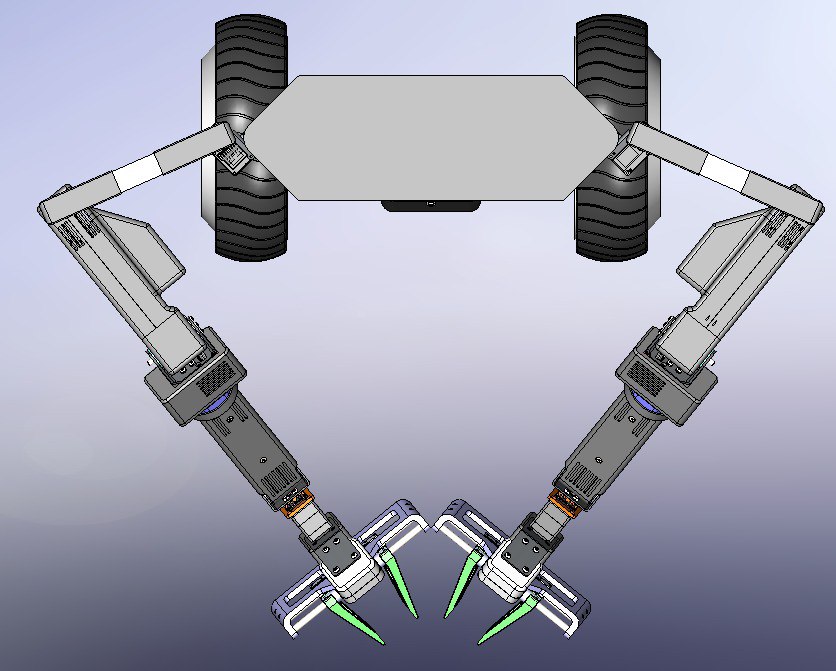
– Bewegungsart – ähnlich wie bei einem Segway.
– Fähigkeit, die Manipulatoren bis auf eine Höhe von 1400 mm anzuheben.
– Traglast jedes Manipulators – 1500 g.
– Länge der Manipulatoren – 650 mm.
– Die gewählte Ausrichtung für die erste Version des Roboters ist ein Forschungsroboter für Schulen, Universitäten und Labore.
Im Mai plane ich, ein Rendering des Konzepts des zukünftigen Roboters zu veröffentlichen, das dem endgültigen Design sehr nahekommen wird.
schön zu sehen wie das projekt vorankommt, die curriculum-anbindung klingt durchdacht
Als Lehrkraft an einer Realschule würde ich das gerne pilotieren, gibt es ein Programm für Testklassen?
Ja, wir planen ein Pilotprogramm für Schulen und freuen uns über interessierte Lehrkräfte. Melden Sie sich gern über das Kontaktformular, dann nehmen wir Sie in die Liste auf.
Wird es Unterrichtsmaterial auf Deutsch geben oder zunächst nur auf Englisch?
Wir entwickeln die Begleitmaterialien von Anfang an mehrsprachig, Deutsch ist dabei eine der ersten Sprachen. Mehr dazu kündigen wir im nächsten Update an.
Danke für die ausführliche Antwort.
Freue mich riesig auf den Bildungsroboter, genau sowas fehlt an Schulen!!!