Novedades en el desarrollo del robot educativo
 2024
2024
Me gustaría compartir el progreso de los últimos dos meses. Hemos completado la mayor parte del trabajo de diseño de los manipuladores y finalizado la estructura principal del robot.
Pinzas
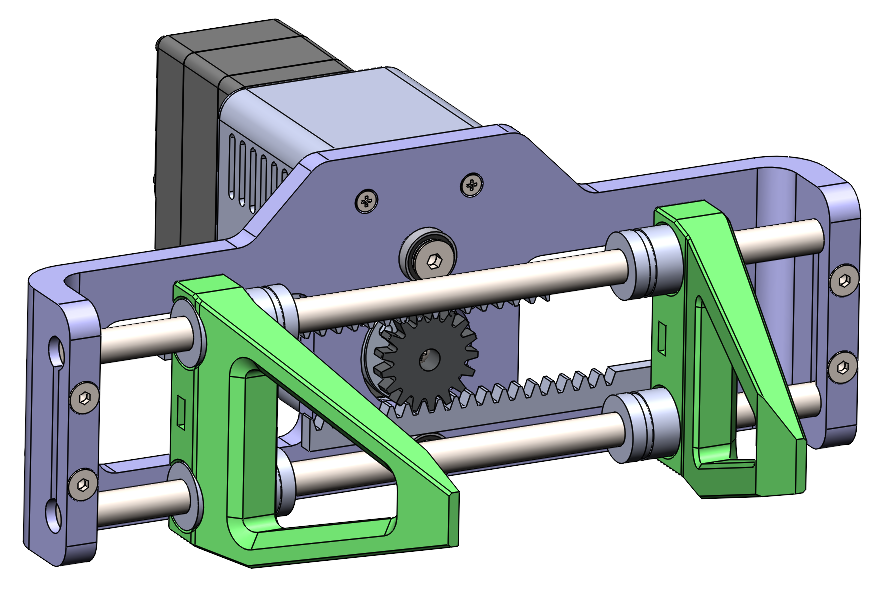
Diseño de pinza paralela
Tras considerar varias opciones, decidimos quedarnos con un diseño de pinza paralela, ya que es el más ligero, el más fácil de fabricar y capaz de manejar una variedad de objetos de distintas formas.
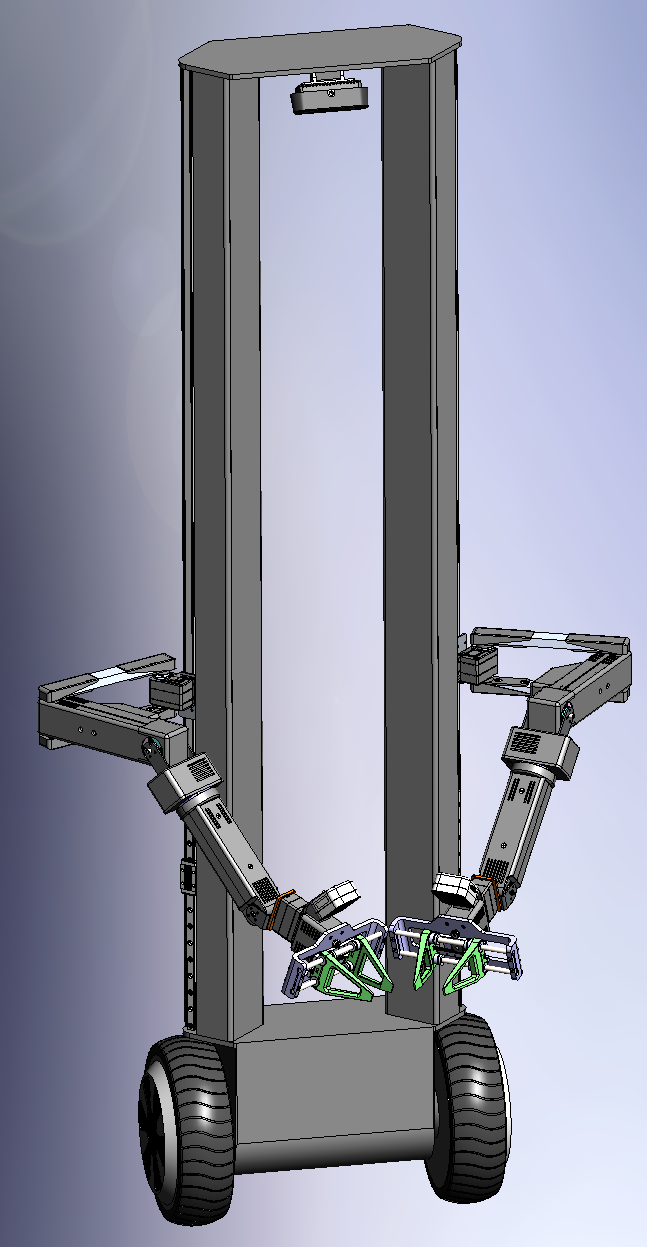
Manipuladores
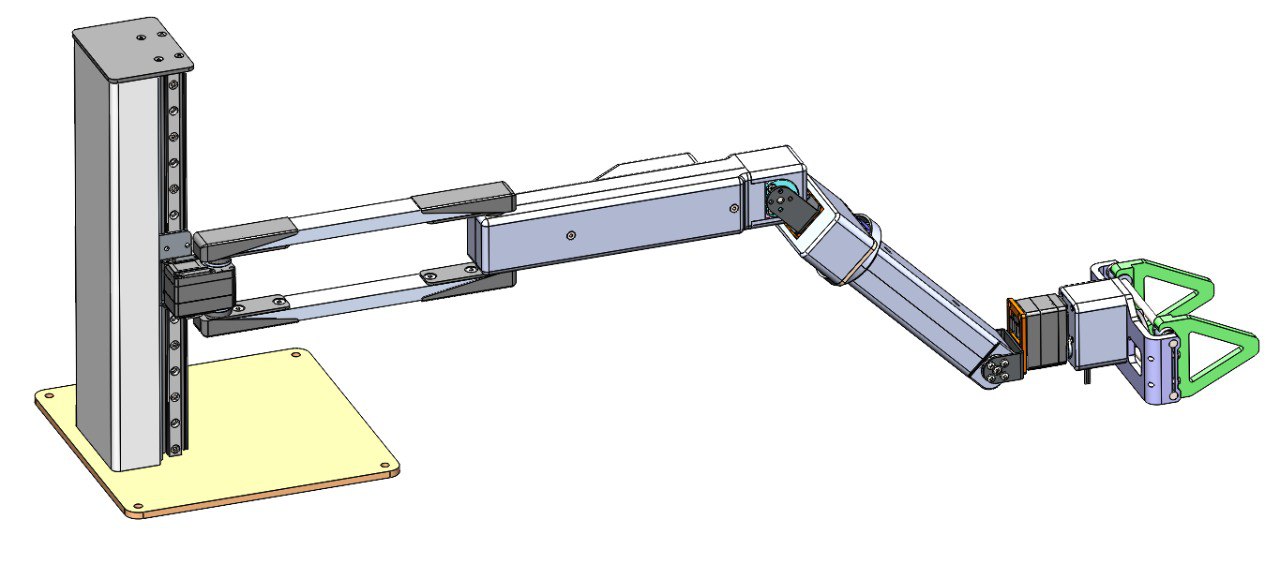
Brazo del robot
- Decidimos usar un diseño semipórtico y semiserie para el manipulador, lo que nos permite mantener un equilibrio entre el par requerido de los motores y el número de grados de libertad.
- Como motores, elegimos los servomotores Feetech 3215 y Feetech 3250, ya que son ligeros, económicos y ofrecen un alto par junto con codificadores magnéticos.
- La longitud del manipulador será de aproximadamente 650 mm y la capacidad de carga estimada está entre 1,5 y 3 kg.
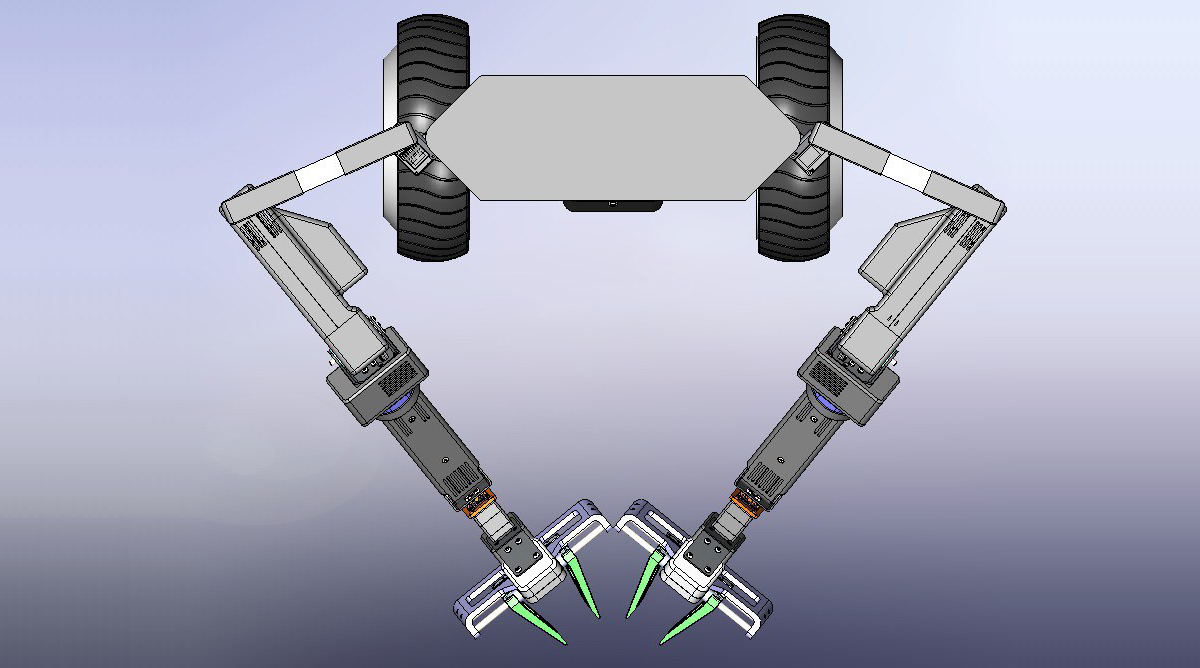
Las principales características actuales del robot son
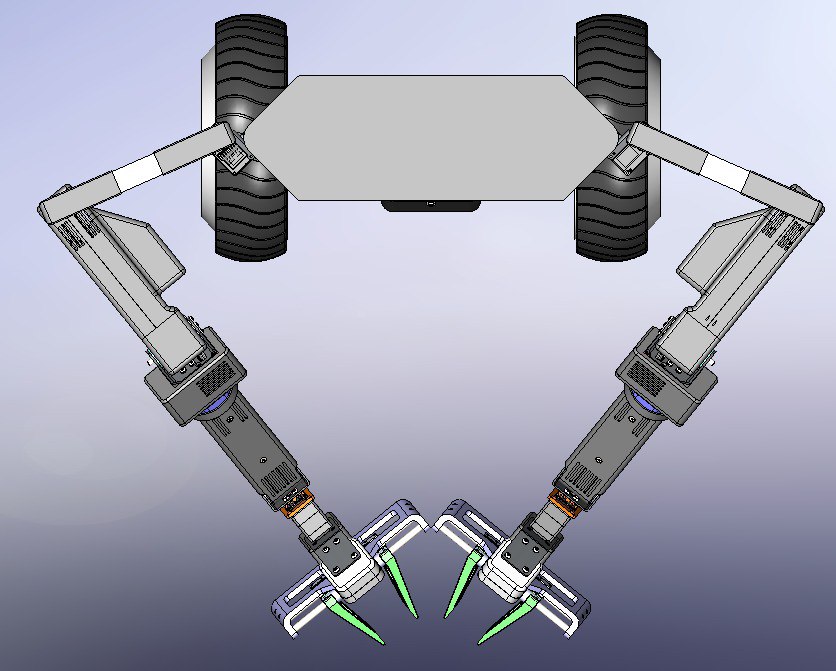
– Tipo de movimiento — similar al de un Segway.
– Capacidad de elevar los manipuladores hasta una altura de 1400 mm.
– Capacidad de carga de cada manipulador — 1500 g.
– Longitud de los manipuladores — 650 mm.
– La dirección elegida para la primera versión del robot es un robot exploratorio para escuelas, universidades y laboratorios.
En mayo tengo previsto publicar un render del concepto del futuro robot, que reflejará de cerca el diseño definitivo.
Llevamos en mi universidad tiempo buscando una plataforma robótica abierta que sirva tanto para prácticas de iniciación como para proyectos de fin de grado más ambiciosos, y por lo que vais enseñando este robot podría encajar perfectamente en ese hueco. La clave para nosotros es que sea ampliable y que la documentación esté a la altura, porque hemos tenido malas experiencias con kits cerrados que dejan de tener soporte a los dos años y se convierten en chatarra cara. Si mantenéis el carácter abierto y publicáis bien el material didáctico, tenéis un cliente seguro en nuestro departamento. Os animo a seguir compartiendo el progreso con este detalle.
Como docente de secundaria sigo este desarrollo con mucho interés. Lo que más valoro de vuestro enfoque es que no escondéis las tripas del robot: que los alumnos vean los servos, el cableado y la mecánica enseña mucho más que una caja cerrada. Espero que el precio final sea asumible para un centro público, que es donde más falta hace este tipo de material.
¿tendrá un entorno de programación por bloques para los más pequeños además de Python?
Sí, el plan es ofrecer programación por bloques para los primeros cursos y una transición gradual a Python para niveles superiores, de modo que el mismo robot sirva a distintas edades. Queremos que crezca con el alumno.
Qué ganas de ver el robot educativo terminado, pinta genial.