教育机器人研发进展
 2093
2093
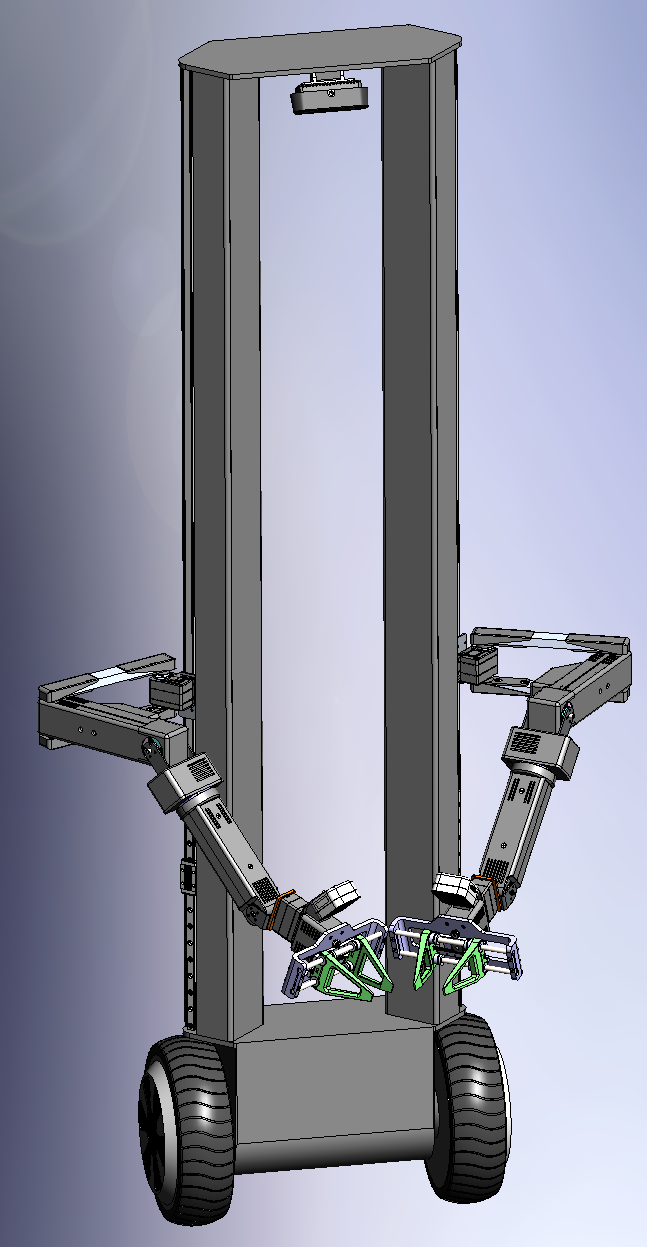
我想分享一下过去两个月取得的进展。我们已经完成了机械臂的大部分设计工作,并最终确定了机器人的主体结构。
夹爪
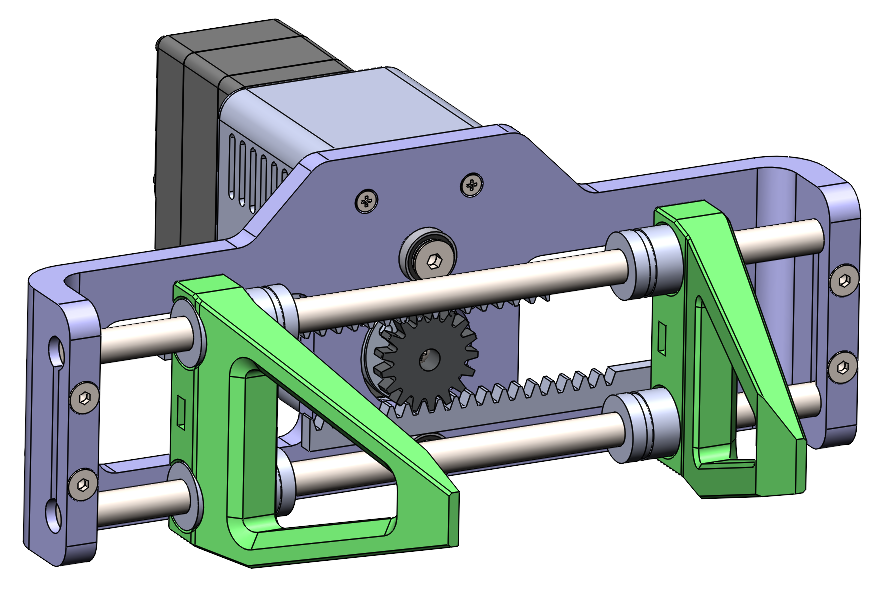
平行夹爪设计
在权衡了多种方案后,我们决定采用平行夹爪设计:它最轻、最易于生产,并且能够抓取各种不同形状的物体。
机械臂
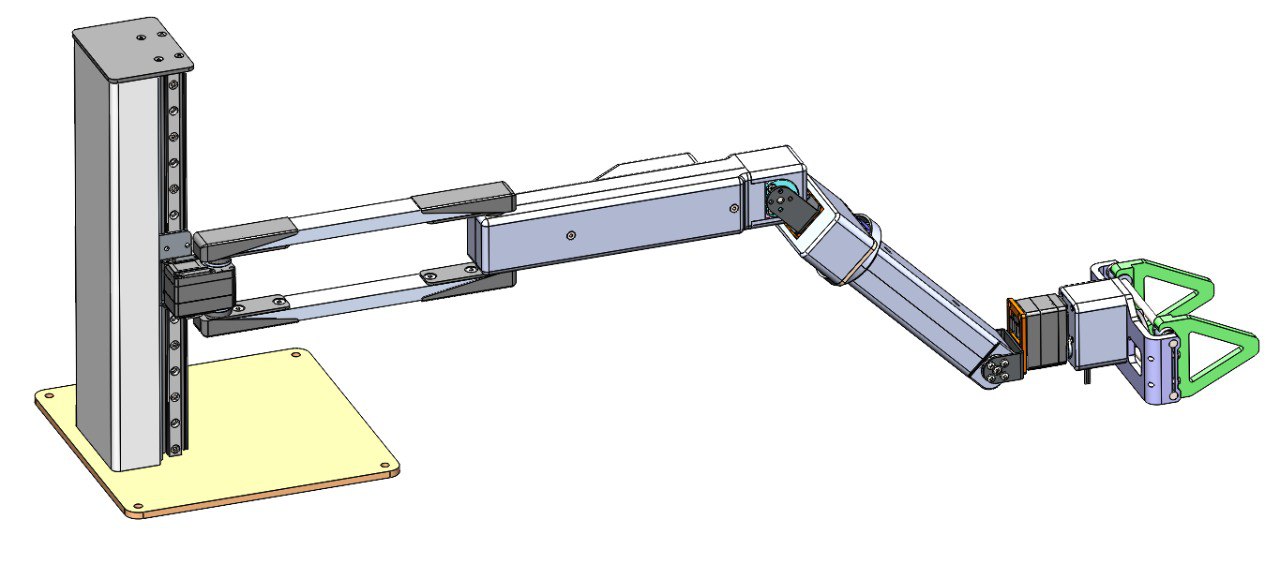
机器人机械臂
- 我们决定为机械臂采用半龙门、半串联的设计方案。这使我们能够在电机所需的扭矩与自由度数量之间保持平衡。
- 在电机方面,我们选用了 Feetech 3215 和 Feetech 3250 伺服电机:它们重量轻、成本低,并且在配备磁编码器的同时提供高扭矩。
- 机械臂的长度约为 650 mm,预计负载能力在 1.5 至 3 kg 之间。
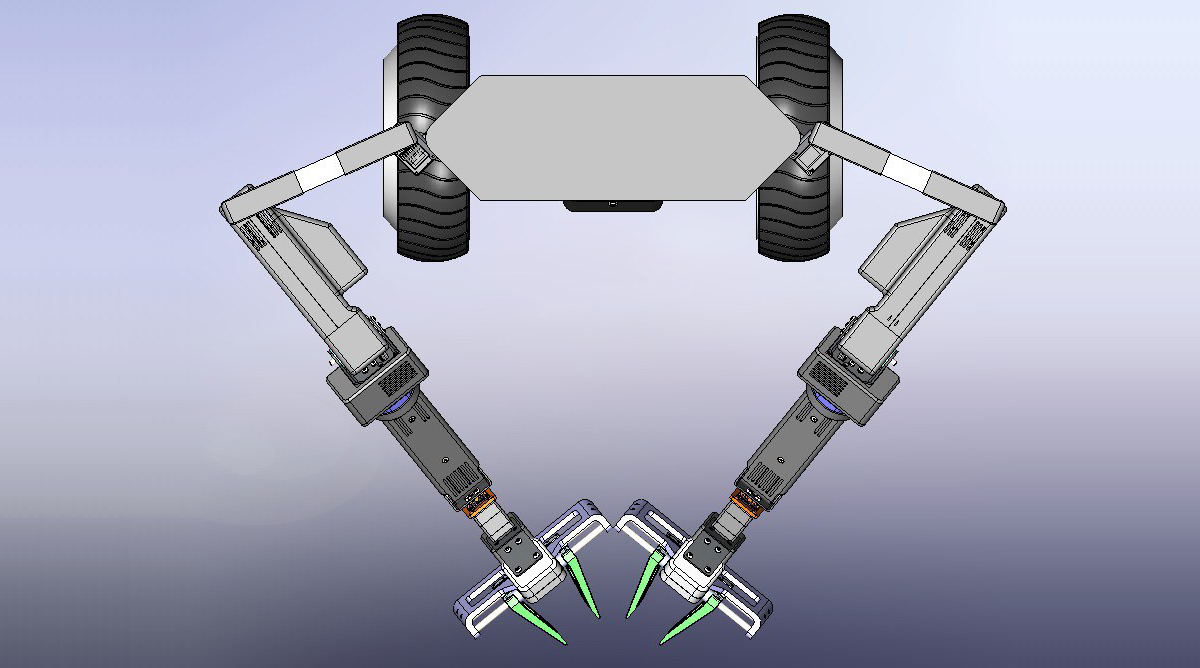
机器人当前的主要特性如下
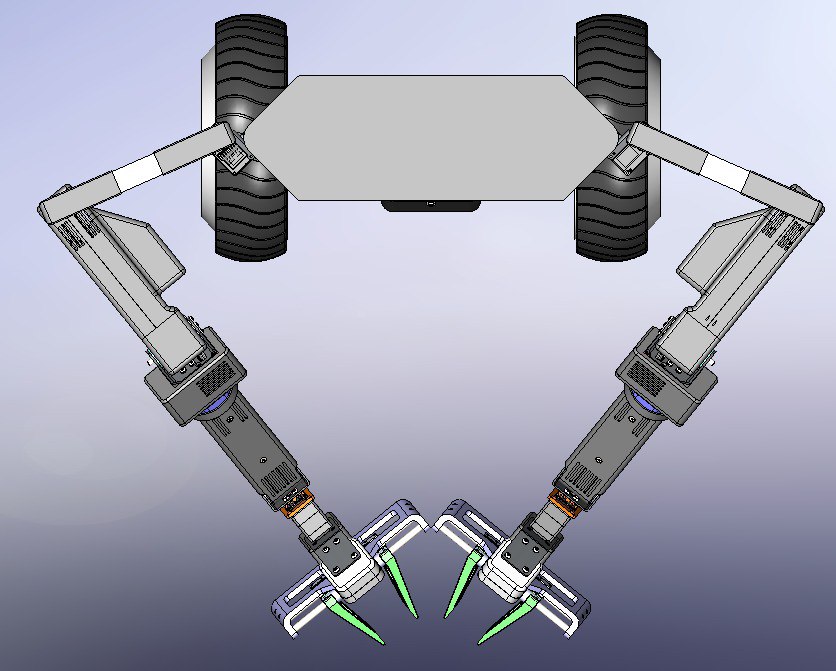
– 移动方式 — 类似 Segway。
– 可将机械臂抬升至最高 1400 mm 的高度。
– 每条机械臂的负载能力 — 1500 g。
– 机械臂的长度 — 650 mm。
– 机器人第一个版本选定的方向是面向中小学、大学和实验室的探索型机器人。
我计划在五月发布未来机器人概念的渲染图,它将非常接近最终的设计。
请问这个教育机器人面向的是中学还是大学 课程配套有没有一起做
我们同时覆盖中学和大学,通过不同难度的课程模块适配。配套课程和教材正在同步开发,会随硬件一起提供,降低老师的备课门槛。
有道理,谢谢。
教育机器人这个方向很有意义 期待量产 学校真的需要这种好上手的平台
想问下编程接口支持图形化还是只能写代码 我们初中生为主 怕门槛太高
两者都支持。低年级可以用图形化积木快速上手,高年级或进阶学生可以切换到Python等代码方式。同一套硬件兼顾不同层次,正是为了平滑过渡。
正是我需要的。
进展不错!! 希望价格能亲民点 让更多普通学校也用得起