Le point sur le développement du robot éducatif
 2026
2026
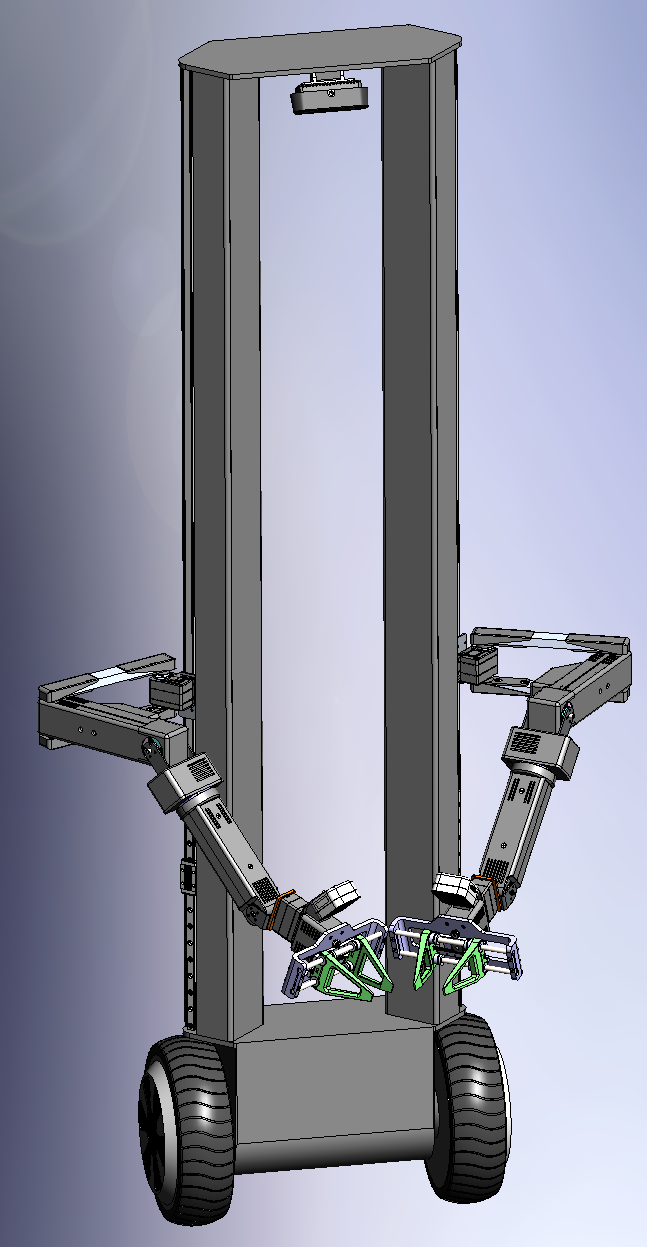
J’aimerais partager les progrès réalisés au cours des deux derniers mois. Nous avons achevé la majeure partie du travail de conception des manipulateurs et finalisé la structure principale du robot.
Pinces
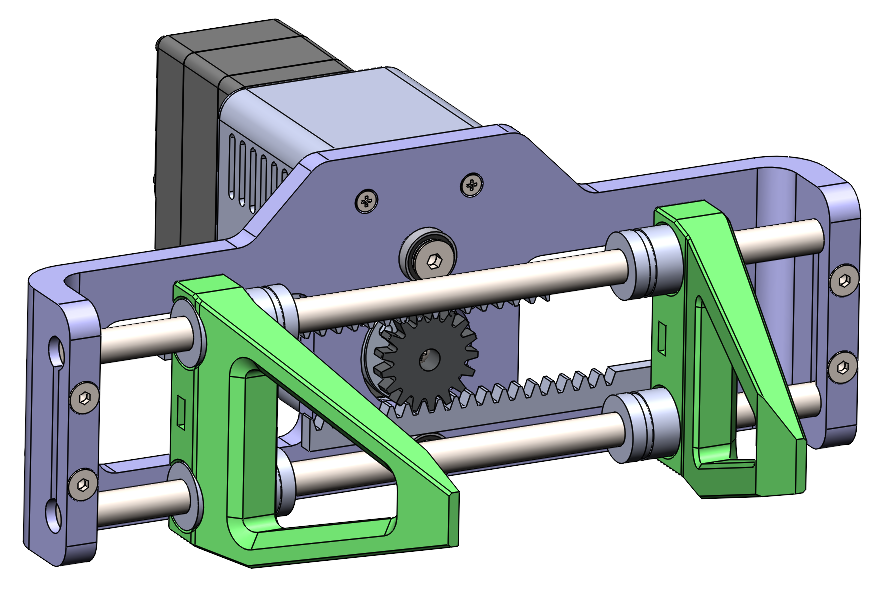
Conception de la pince parallèle
Après avoir étudié différentes options, nous avons décidé de retenir une conception de pince parallèle, car c’est la plus légère, la plus simple à produire et capable de manipuler une grande variété d’objets de formes différentes.
Manipulateurs
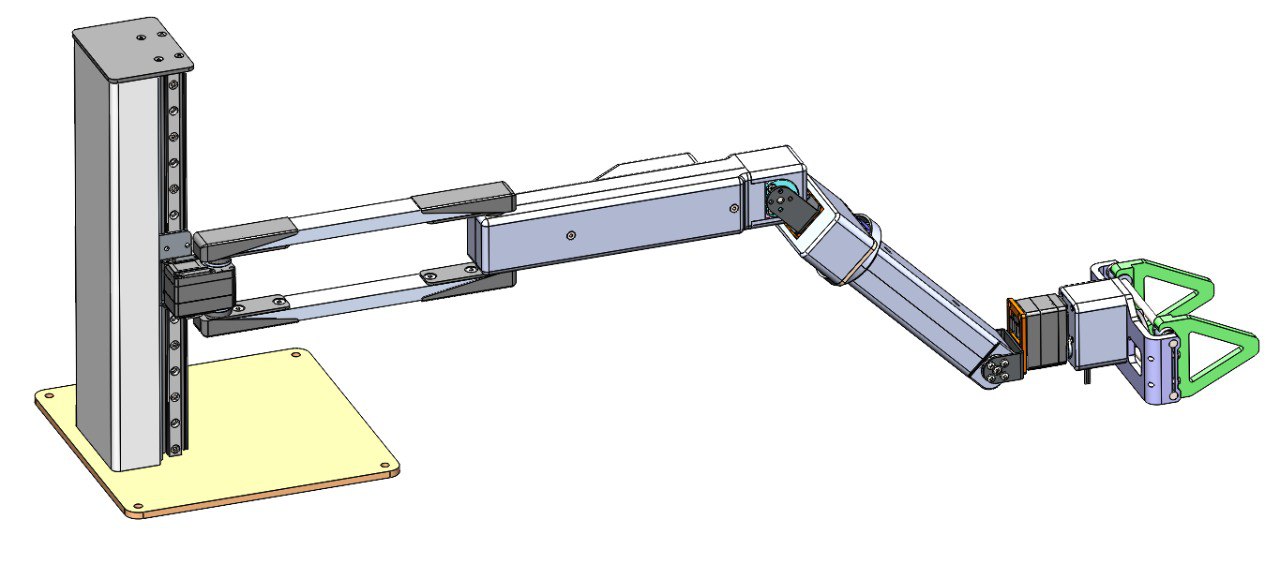
Bras du robot
- Nous avons décidé d’adopter une architecture semi-portique et semi-sérielle pour le manipulateur. Cela nous permet de maintenir un équilibre entre le couple requis des moteurs et le nombre de degrés de liberté.
- Pour les moteurs, nous avons choisi les servomoteurs Feetech 3215 et Feetech 3250, car ils sont légers, peu coûteux et offrent un couple élevé ainsi que des encodeurs magnétiques.
- La longueur du manipulateur sera d’environ 650 mm, et la capacité de charge utile estimée est comprise entre 1,5 et 3 kg.
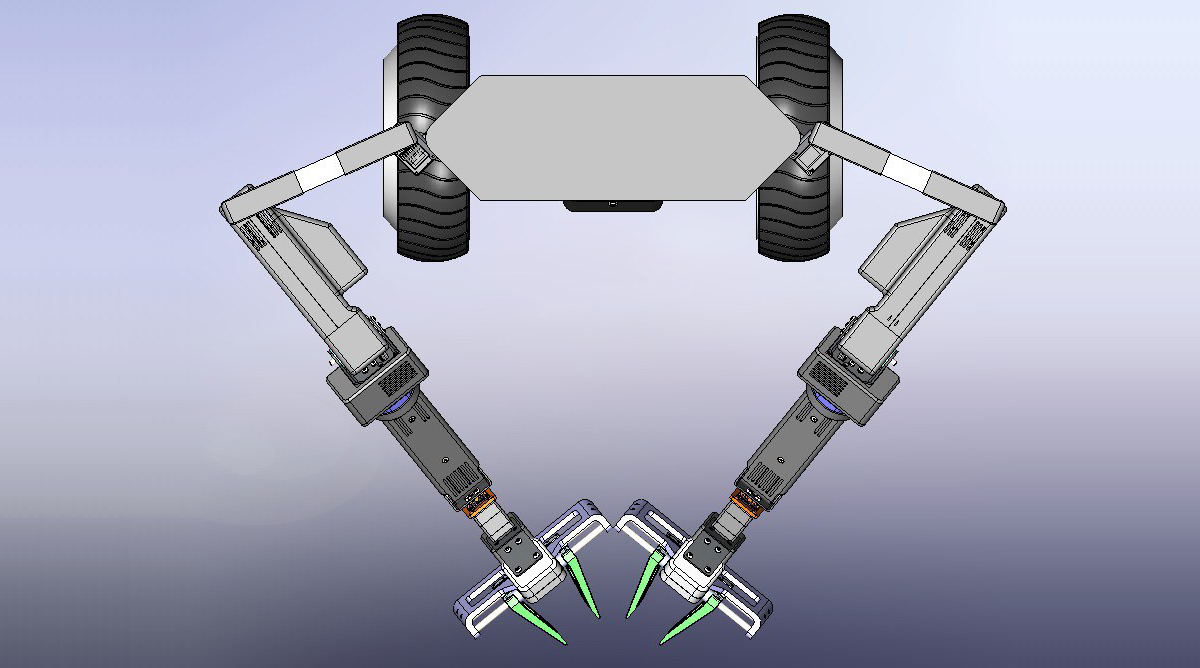
Les principales caractéristiques actuelles du robot sont les suivantes
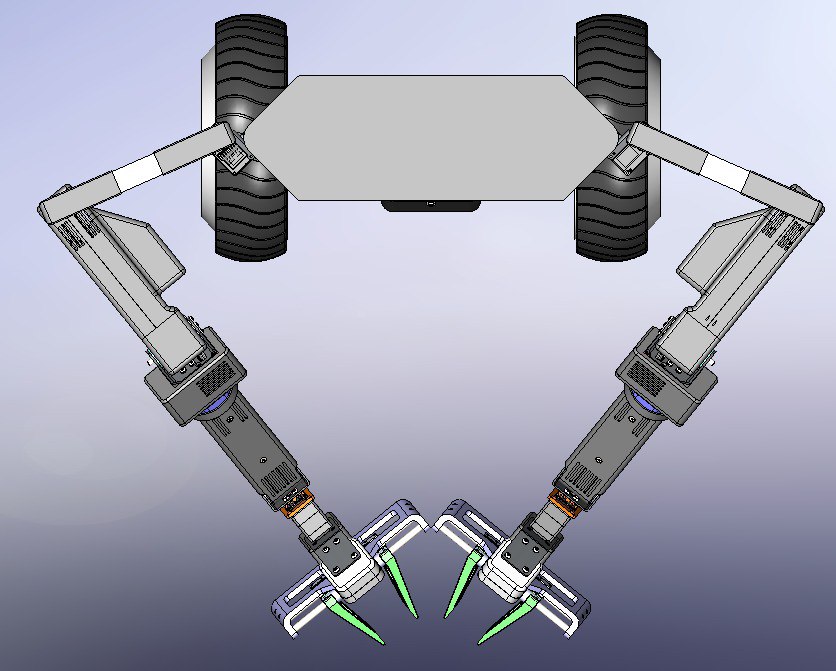
– Type de déplacement — similaire à un Segway.
– Capacité à élever les manipulateurs jusqu’à une hauteur de 1400 mm.
– Capacité de charge utile de chaque manipulateur — 1500 g.
– Longueur des manipulateurs — 650 mm.
– L’orientation choisie pour la première version du robot est celle d’un robot d’exploration destiné aux écoles, aux universités et aux laboratoires.
En mai, je prévois de publier un rendu du concept du futur robot, qui reflétera fidèlement le design final.
hâte de voir le robot éducatif finalisé, ça manque cruellement d’options open source pour les écoles
le fait que ce soit ouvert et modifiable c’est exactement ce qu’il faut en contexte pédagogique, bravo pour la démarche
super initiative, mes élèves vont adorer
il sera dispo pour les universités à quel horizon et dans quelle gamme de prix ?
On vise une disponibilité pour la rentrée prochaine, avec un tarif pensé pour les budgets pédagogiques — nettement sous les plateformes propriétaires équivalentes. On communiquera les détails dès que la production pilote sera bouclée.
Merci pour la réponse détaillée.