教育用ロボット開発アップデート
 2049
2049
この2か月間の進捗を共有したいと思います。マニピュレータの設計作業の大半を完了し、ロボットの基本構造を確定しました。
グリッパー
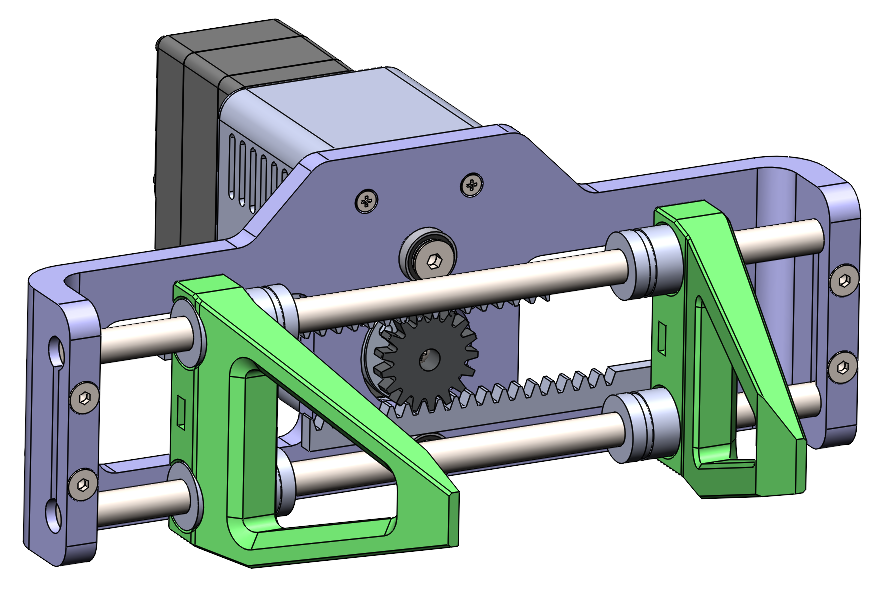
平行グリッパーの設計
さまざまな選択肢を検討した結果、平行グリッパーの設計を採用することにしました。最も軽量で、製造が容易であり、形状の異なるさまざまな物体を扱えるためです。
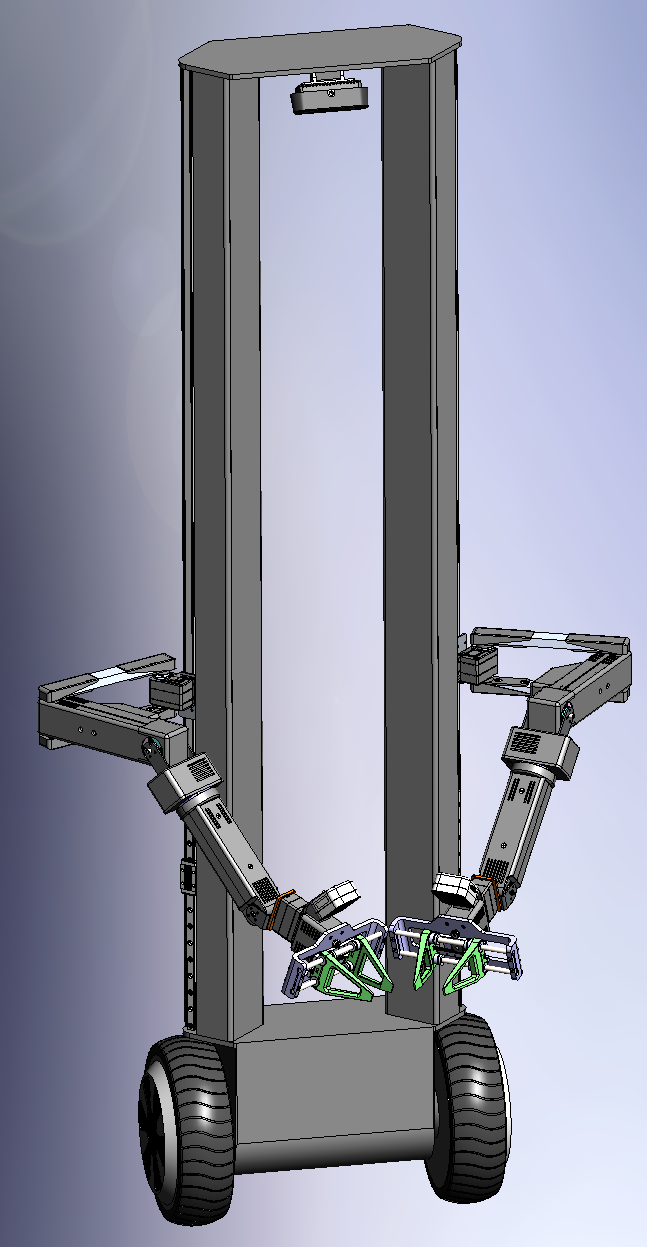
マニピュレータ
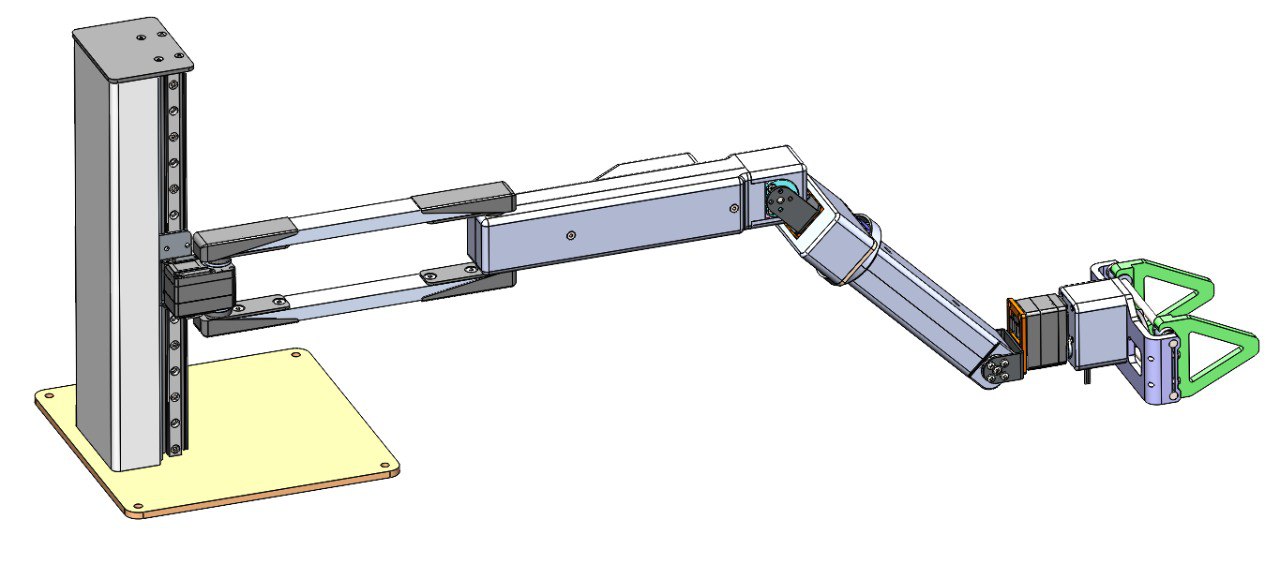
ロボットアーム
- マニピュレータには、セミガントリー・セミシリアルの設計を採用することにしました。これにより、モーターに必要なトルクと自由度の数とのバランスを保つことができます。
- モーターには、Feetech 3215 および Feetech 3250 のサーボモーターを選びました。軽量で低コストでありながら、磁気エンコーダーとともに高いトルクを発揮するためです。
- マニピュレータの長さは約 650 mm で、想定される可搬重量は 1.5〜3 kg です。
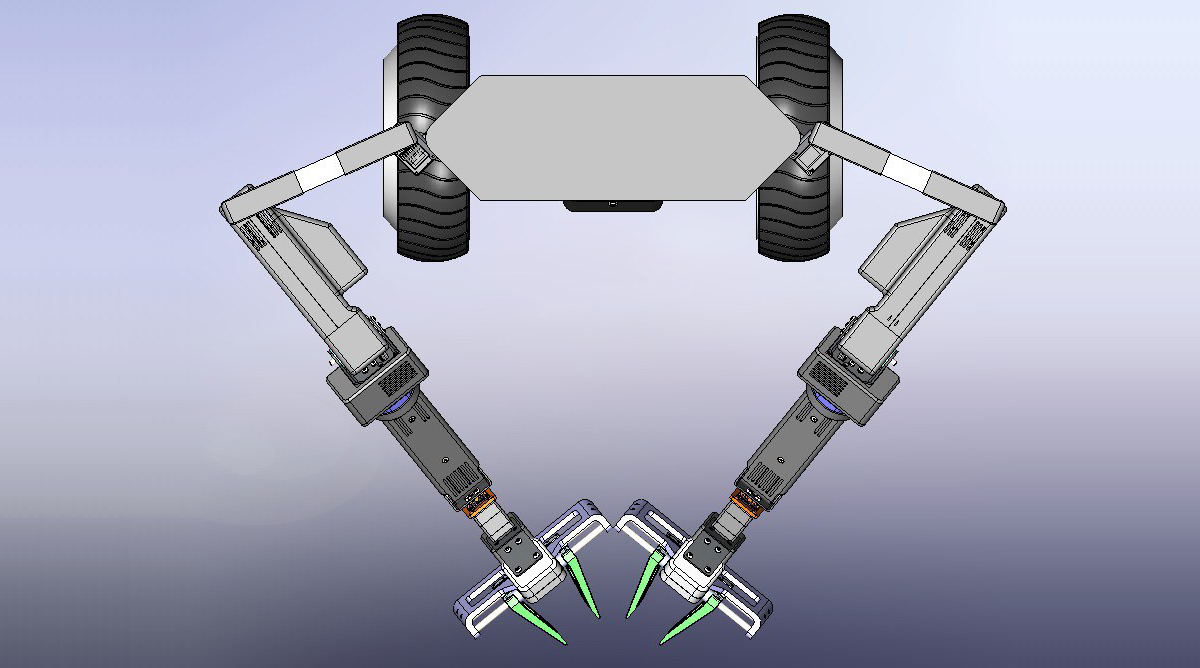
ロボットの現時点での主な仕様は次のとおりです
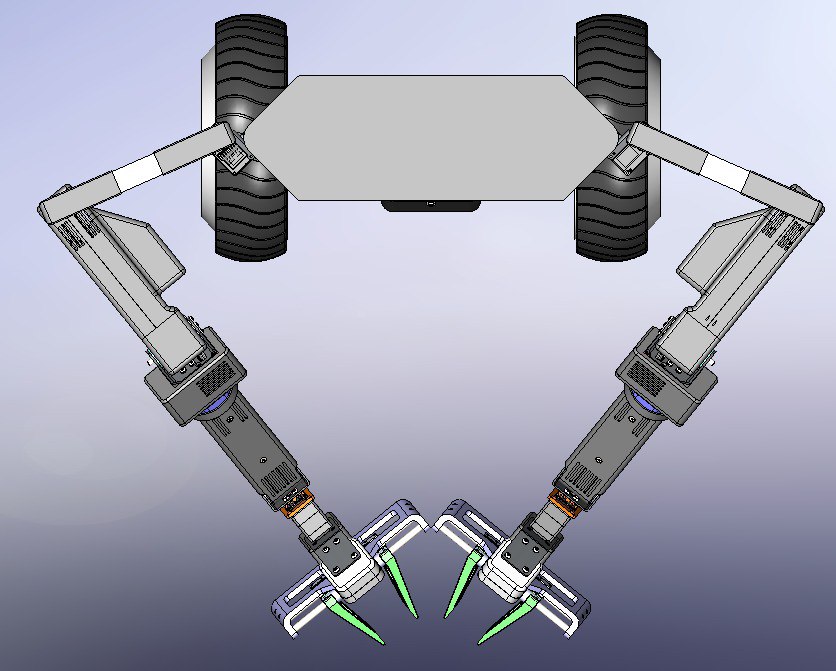
– 移動方式 – Segway に類似。
– マニピュレータを最大 1400 mm の高さまで持ち上げる能力。
– 各マニピュレータの可搬重量 – 1500 g。
– マニピュレータの長さ – 650 mm。
– ロボットの初版で選んだ方向性は、学校・大学・研究所向けの探索用ロボットです。
5月には、将来のロボットのコンセプトレンダリングを公開する予定で、最終的なデザインに近いものになります。
対象年齢ってどのくらいを想定してますか中学生でもいけます?
中学生から大学初年度までを想定しています。教材を段階的に用意しているので習熟度に合わせて使えます。
教育用ロボの開発アップデート楽しみにしてました!!! 学校で使えるの待ってます
価格次第で導入したい。
カリキュラム込みで提供されるなら現場としてはすごく助かります先生の負担減るので
はい、指導案とサンプル課題をセットで提供予定です。教える側の準備負担を減らすことを重視しています。