负载下的 Waveshare 串行总线舵机驱动板测试
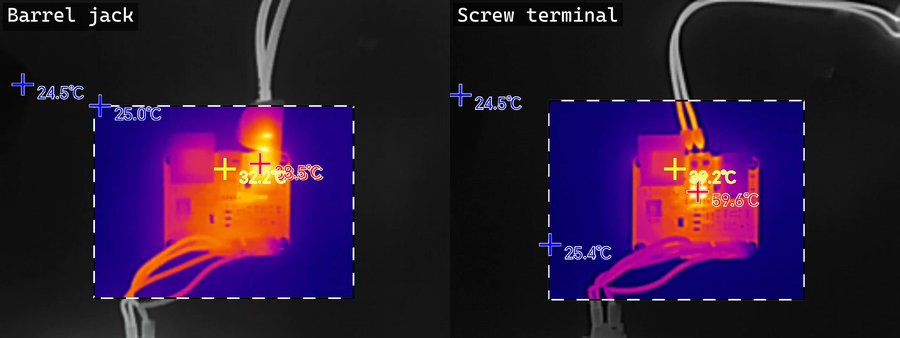
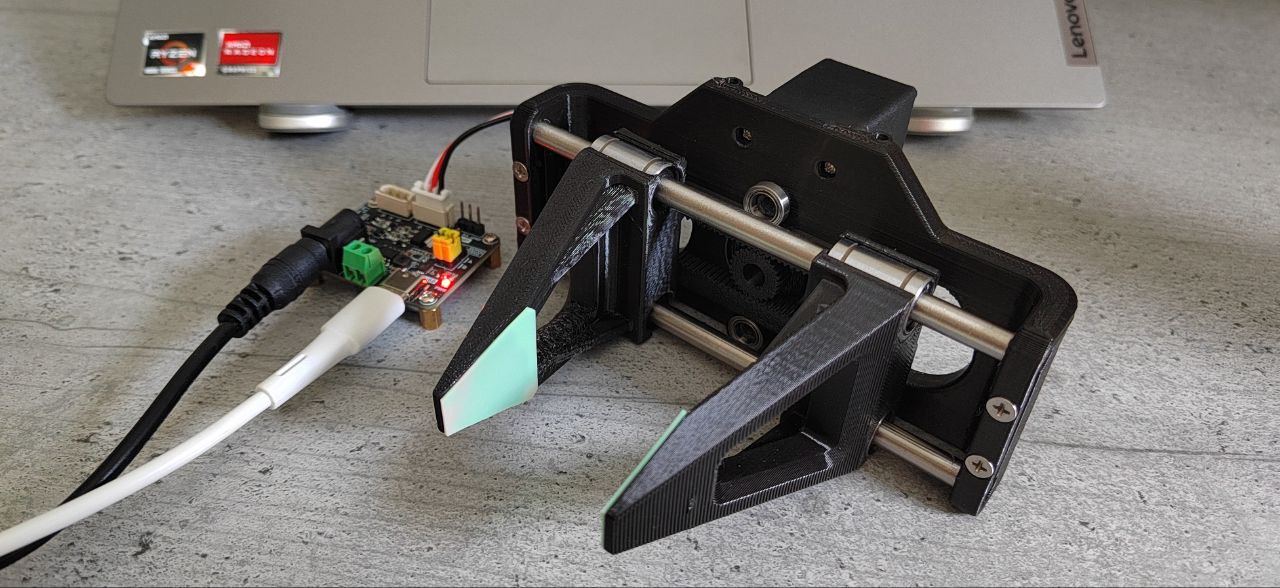
对两块 Waveshare 串行总线舵机驱动板进行的实测热负载测试,涵盖四种场景(2 A / 10 分钟、5 A / 5 分钟、7 A / 2 分钟、10 A / 30 秒),电压 12 V。比较了筒...
Boris Kotov
03 May 2026
对两块 Waveshare 串行总线舵机驱动板进行的实测热负载测试,涵盖四种场景(2 A / 10 分钟、5 A / 5 分钟、7 A / 2 分钟、10 A / 30 秒),电压 12 V。比较了筒...
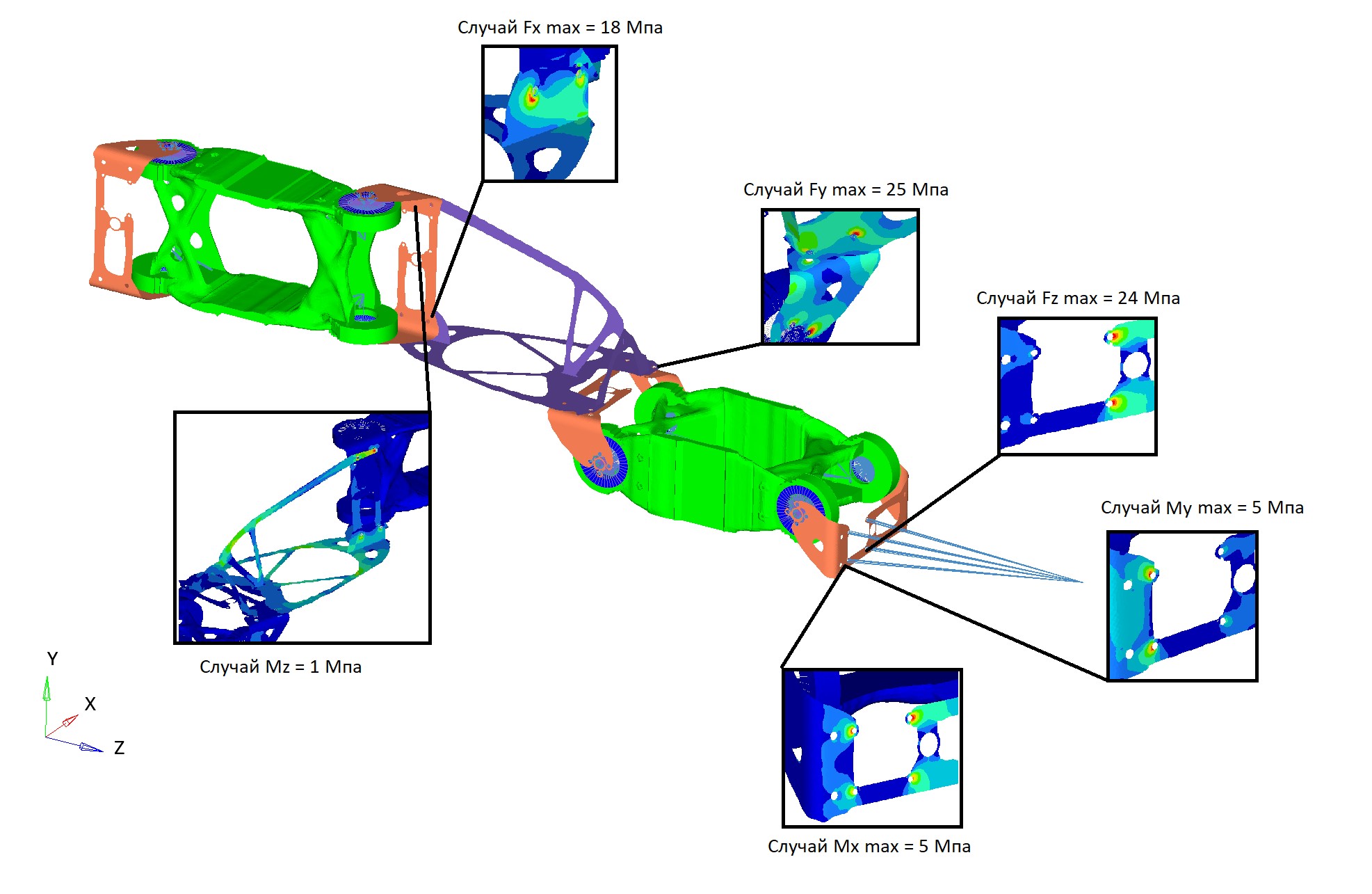
本研究采用 SIMP 算法对机械臂进行拓扑优化,在保持质量约束的同时提升结构刚度。通过有限元分析以及对铝制和钢制支架的迭代优化,刚度显著提高——在所有受载方向上将末端位移降低了 57-76%。

对 Feetech STS3250 串行总线舵机的全面实测评估。测试显示其转速相对额定值偏差为 2-3%,位置重复精度优异(±0.02 mm),机械回差在 0.5° 规格之内。包含对扭矩输出、热行为和...

深入解析 Feetech STS3215 舵机,探究其实际性能、精度与控制特性。我们分析这款经济实惠、功能丰富的舵机在实际负载、速度和精度测试中的表现,揭示对机器人与运动控制设计有价值的洞见。
夹爪是一种用于抓取、握持、操作或搬运物体的机械或机器人装置。它充当机械臂或自动化系统的“手”或末端执行器,使机器人能够通过抓取和释放物体与物理世界交互。
我想谈谈机械臂中最重要的部件——电机——是如何选定的。
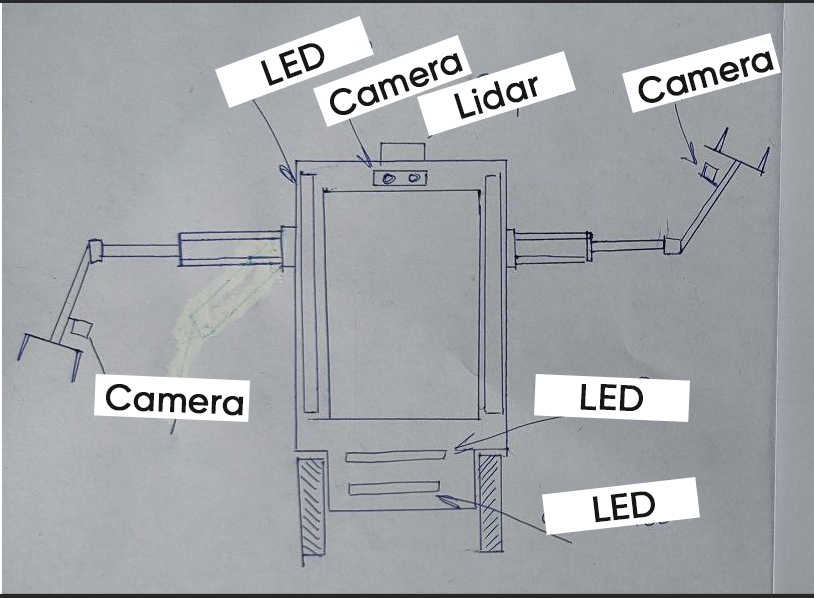
五月,我们完成了 Robo 9 设计的第一个版本,展示了它从最初概念到最终结构的演进。该设计采用哑光黑机身、双机械臂、平衡机构,以及 LiDAR 和深度相机等先进传感器。更新包括用于提升稳定性的大容量...
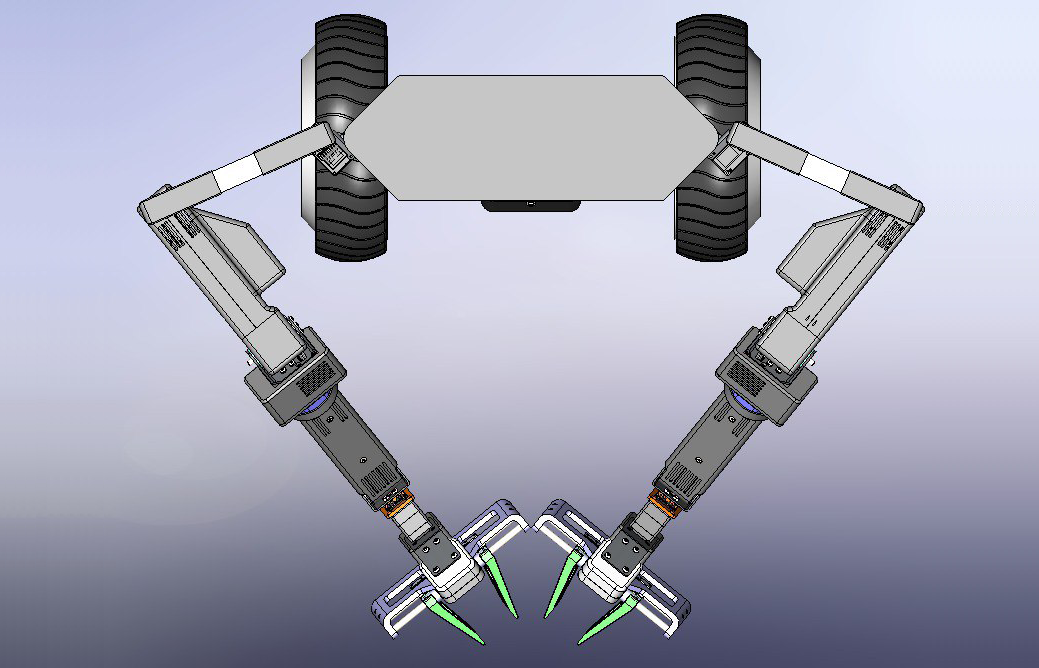
过去两个月,我们推进了 Robo 9 研究型机器人的开发,完成了其结构和双机械臂。它采用轻量化平行夹爪和搭载 Feetech 电机的半龙门式设计,工作半径 650 mm,负载能力 1.5 至 3 kg...
ALOHA 2 打破了这一格局。它不只是又一个研究项目,而是迈向机器人技术普及的大胆一步。凭借开放的硬件设计、模块化组件,以及媲美(甚至超越)昂贵专有系统的能力,ALOHA 2 打造了一个不被付费墙限...
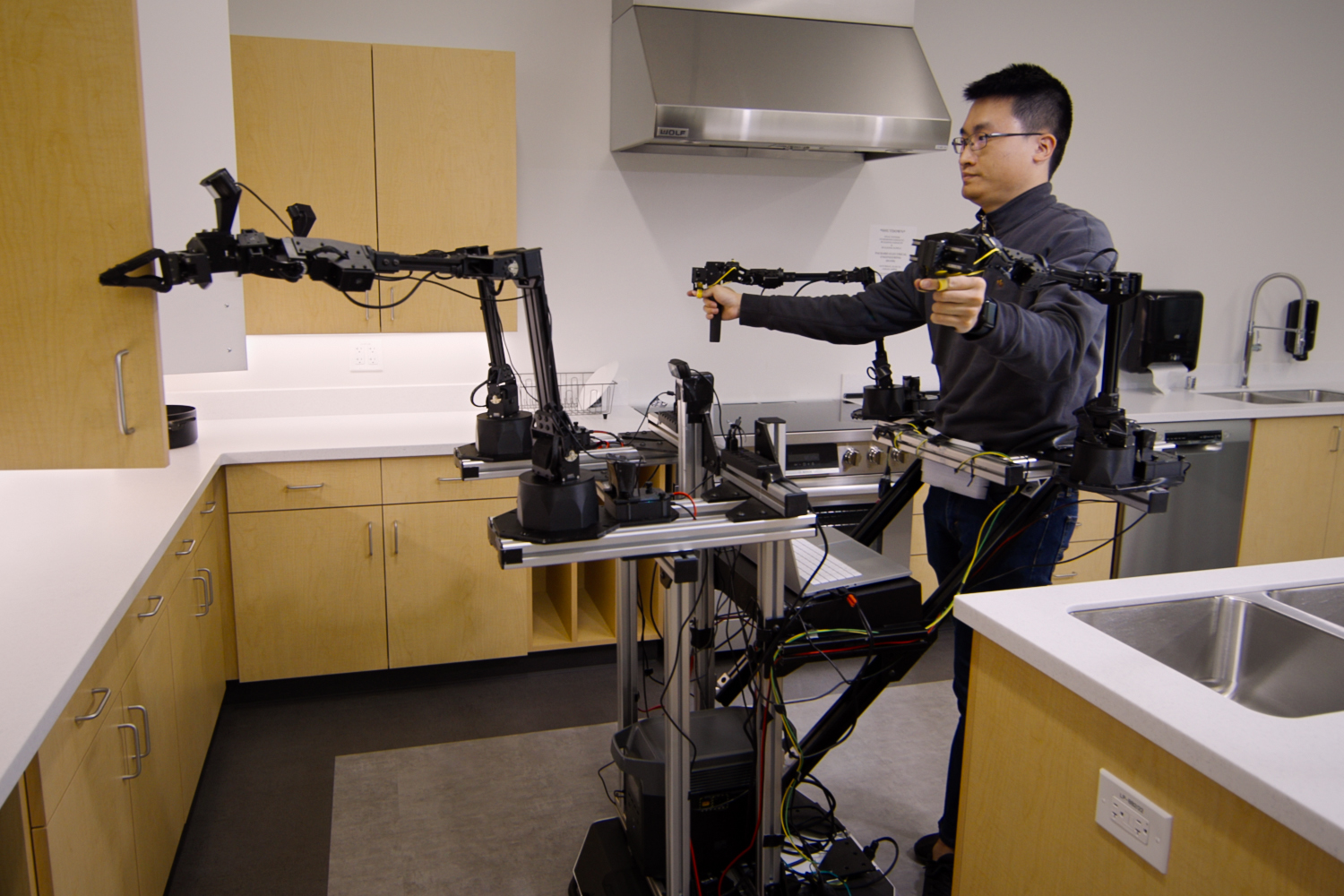
Mobile ALOHA 项目由斯坦福大学团队与 Boston Dynamics AI Institute 合作开发,代表了机器人技术的重大飞跃。它通过引入一种低成本的全身遥操作系统,解决了传统桌面式...
我们重视您的隐私
我们使用 Cookie 来提升您的浏览体验、提供个性化广告或内容并分析我们的流量。您可以全部接受、拒绝非必要 Cookie,或选择允许哪些 Cookie。 隐私政策
管理 Cookie 偏好
网站正常运行所必需,无法关闭。
帮助我们了解访问者如何使用网站。
用于投放相关广告并衡量其效果。
启用增强功能和个性化。