提升 6 自由度机械臂的结构刚度
 2042
2042
摘要
本文介绍了一系列设计与工程工作,旨在确保机械臂的挠度不超过 0.3 mm。研究对象为一台机器人机械臂。本研发工作的目的是优化以下机械臂部件的设计:
- 铝制支架
- 钢制 U 形支架
- 钢制「鳍」形支架
所完成工作的结果:
根据支架优化的结果,开发了精细化的机械臂电子模型,并对机械臂在电机产生的最大过载下进行了静强度计算。形成了一份设计修改建议清单。开发了优化后设计的电子模型,包括对结构的校核计算。
未能完全达到所要求的刚度指标。然而,结构刚度得到了显著提升:
- 由垂直载荷引起的位移降低了 57%
- 由沿 X 轴的水平载荷引起的位移降低了 65%
- 由沿 Z 轴的水平载荷引起的位移降低了 66%
- 由绕 X 轴的力矩引起的位移降低了 66%
- 由绕 Y 轴的力矩引起的位移降低了 76%
- 由绕 Z 轴的力矩引起的位移降低了 67%
缩写与符号
| 缩写 | 释义 |
|---|---|
| TOR | 技术要求 |
| EM | 电子模型 |
| FE | 有限单元 |
| FEM | 有限元模型 |
| SSS | 应力-应变状态 |
| CG | 重心 |
| CS | 坐标系 |
引言
作为机械臂设计分析的初始数据,客户提供了以曲面构建的轮廓,以及处于折叠状态的机械臂电子模型。在工作范围内,对机械臂进行了分析,并提升了结构的刚度特性,使其能够承受作用于其上的静载荷以及电机产生的过载,同时具有尽可能小的质量。
作为机械臂设计优化的初始数据,客户提供了机械臂的电子模型。在工作范围内,对设计进行了精细化处理,并对其在过载条件下的静强度进行了计算,同时制定了改进建议。
机械臂概念的形成
在工作范围内,需要对机械臂设计进行优化。根据技术要求,机械臂设计的主要要求如下:
- 结构必须能够承受由 1.1 kg 重物产生的静载荷
- 机械臂末端的挠度不应超过 0.3 mm
- 允许的质量增加:不超过 15%
- 必须保持当前每个关节 270° 的弯曲角度
- 不得增加独特(定制制造)零件的数量
机械臂主要部件说明
预期通过改变机械臂主体部分支架的形状来满足刚度要求。
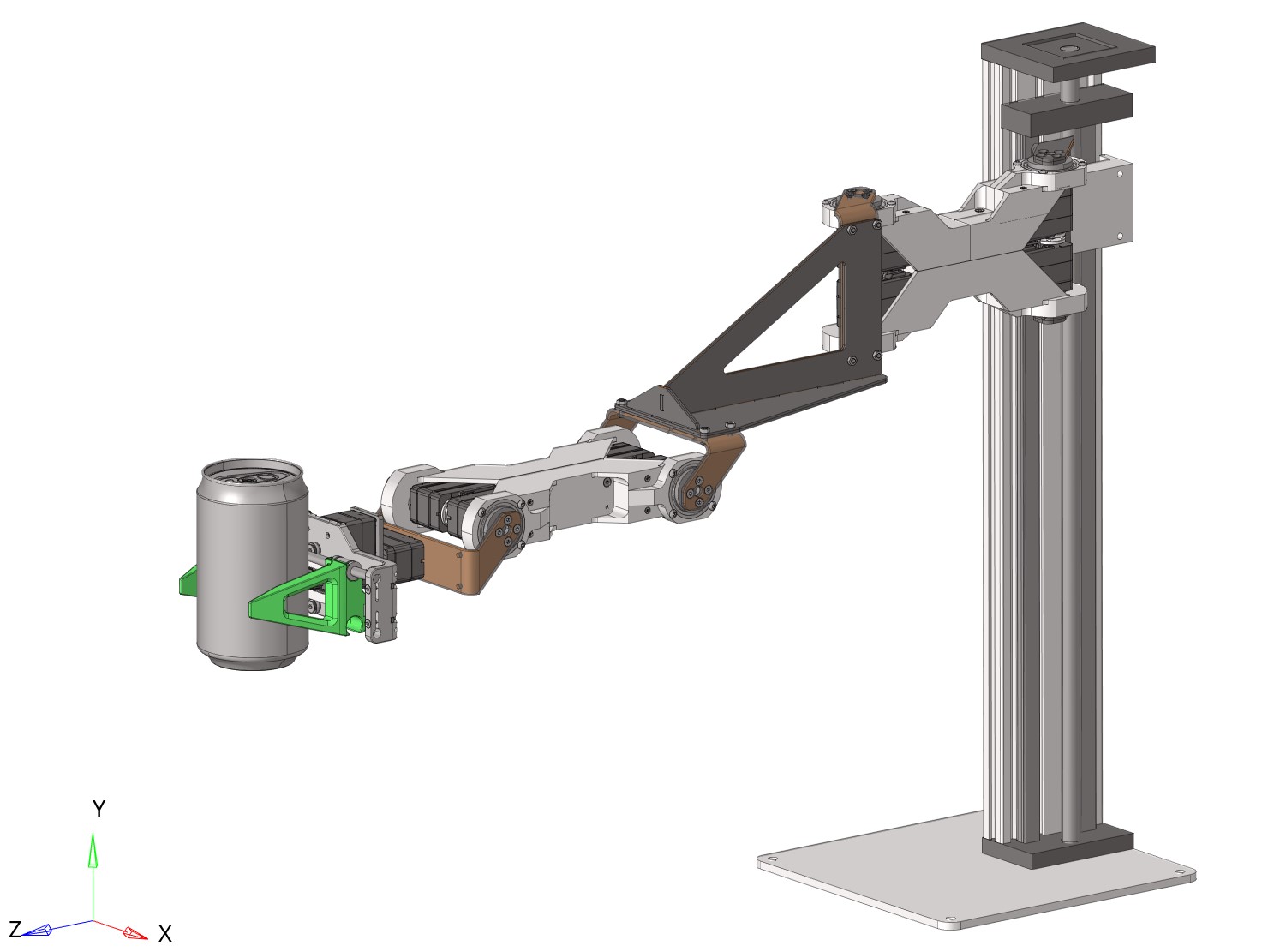
机械臂总览图 1 |
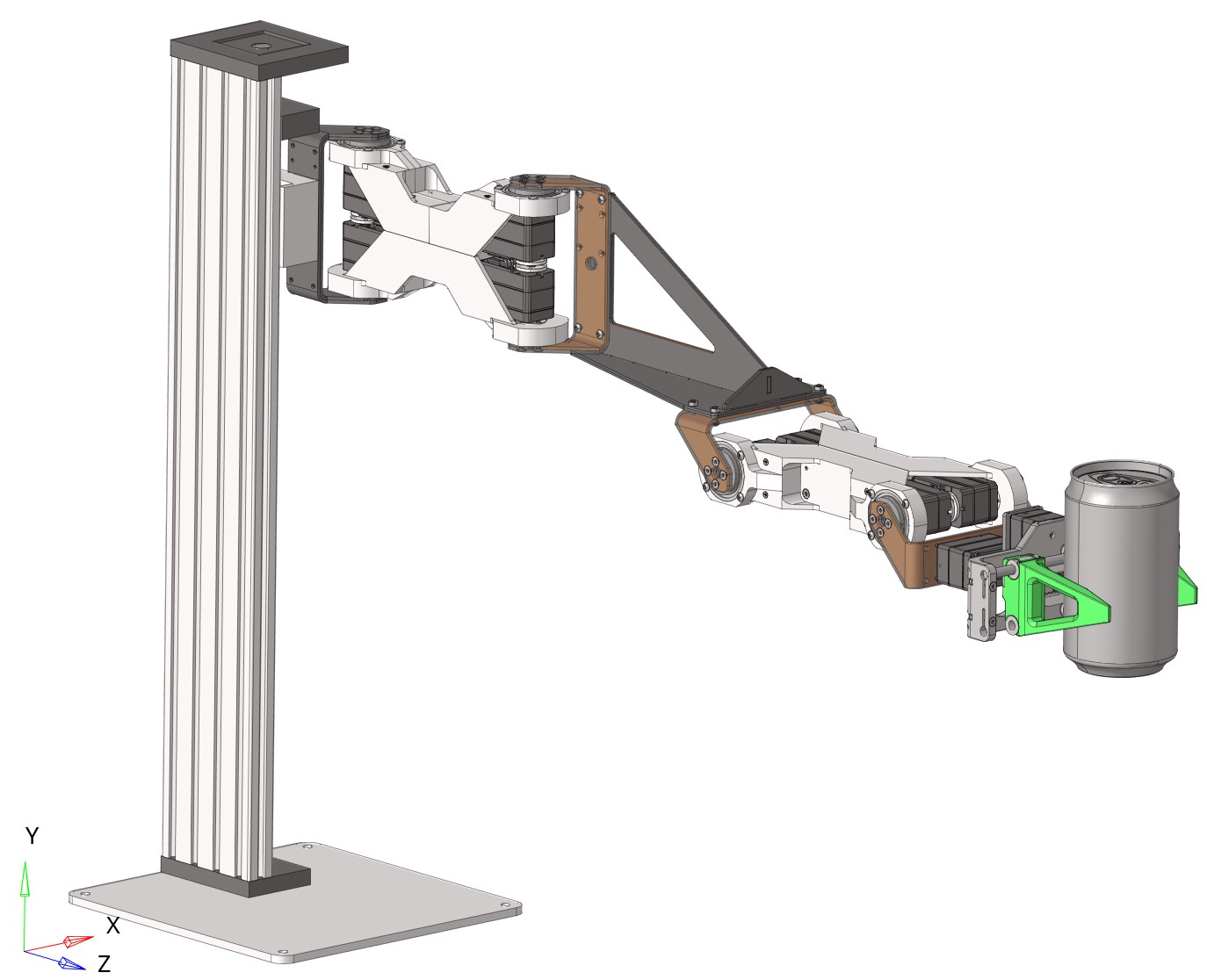
机械臂总览图 2 |
如图 1 所示,机械臂设计由一个底座(图 2)、4 个钢制 U 形支架(图 3)、4 个铝制支架(图 4)、1 个钢制「鳍」形支架(图 5)以及 10 个伺服驱动器组成。
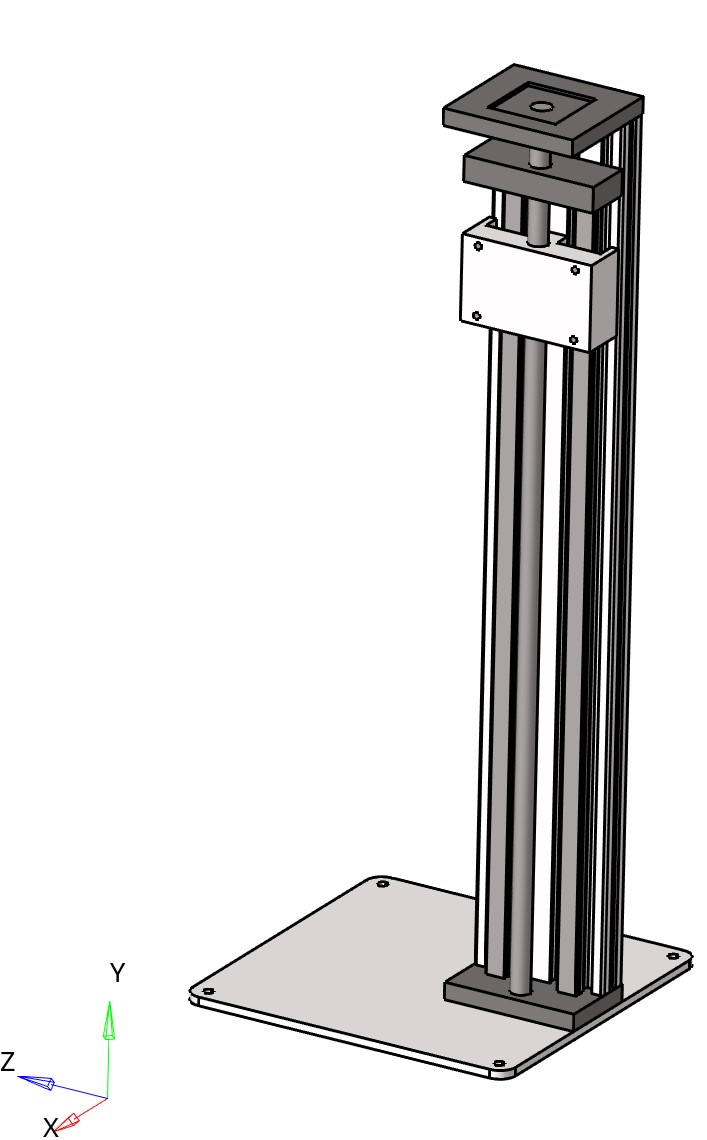
底座总览图
钢制 U 形支架 1 |
钢制 U 形支架 2 |
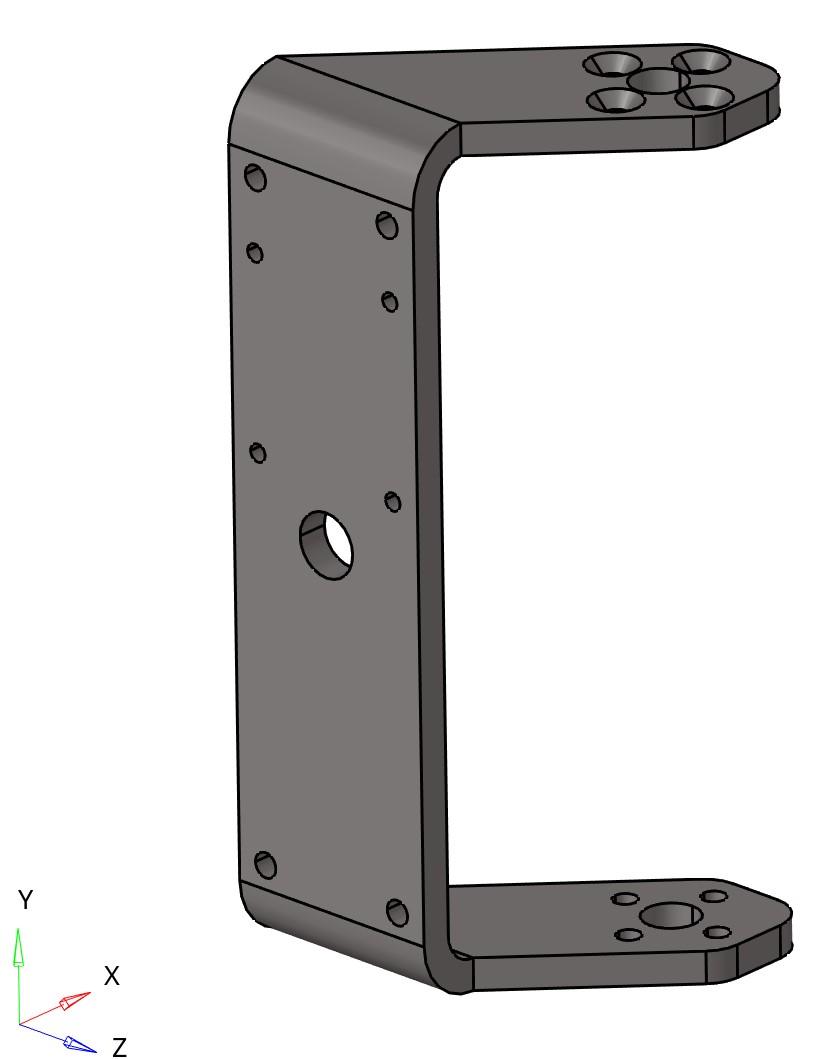
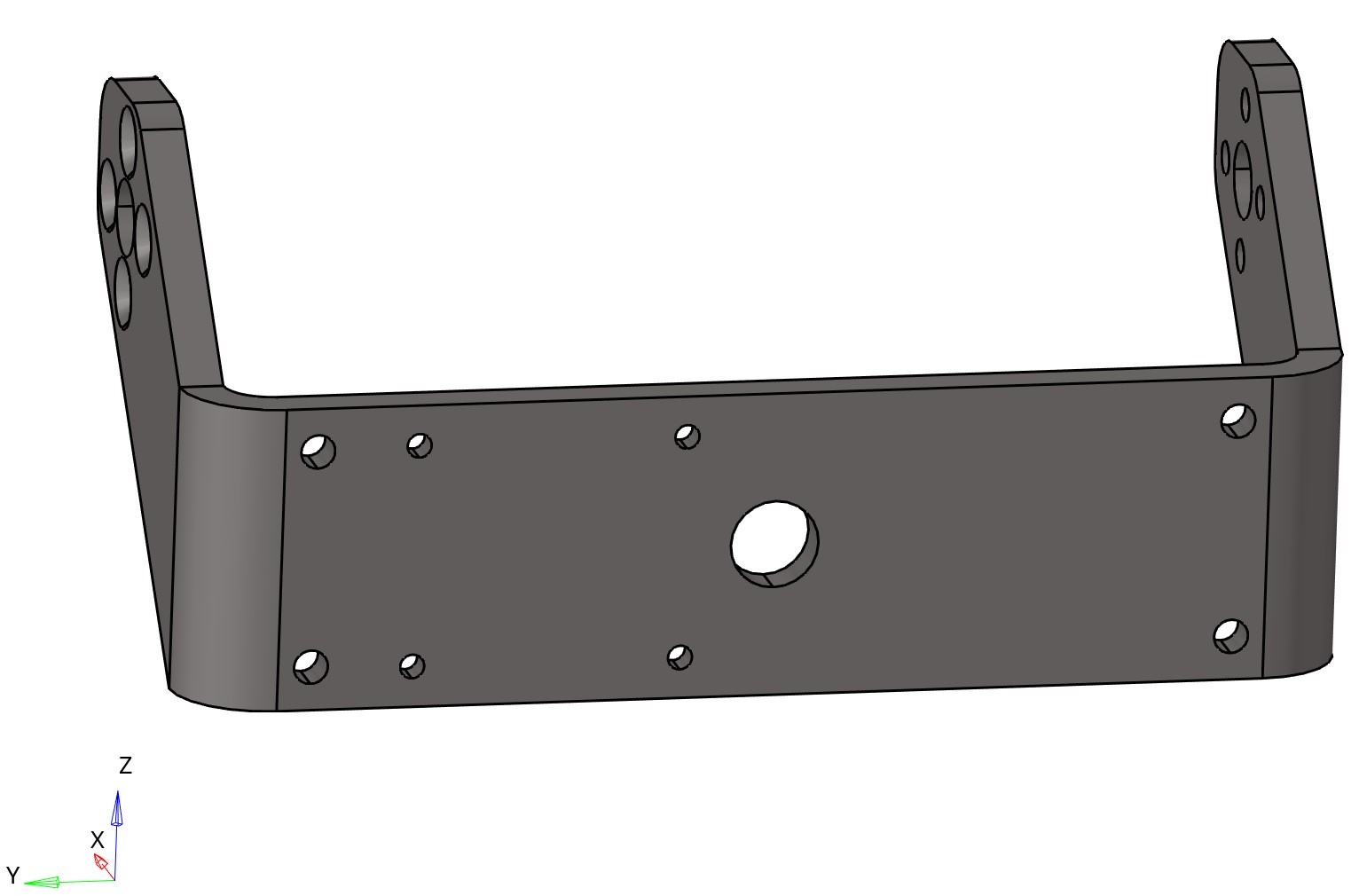
铝制支架 1 |
铝制支架 2 |
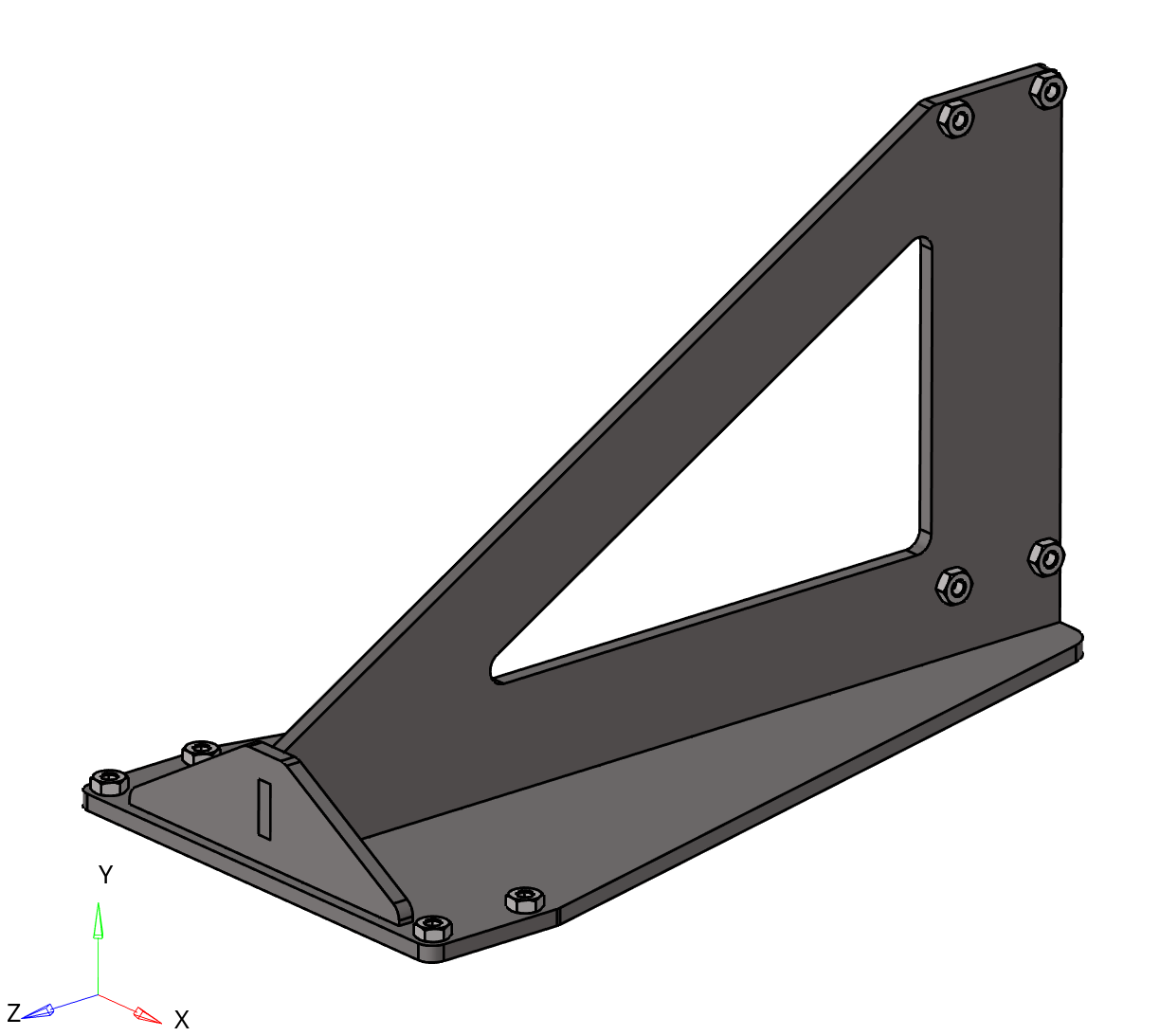
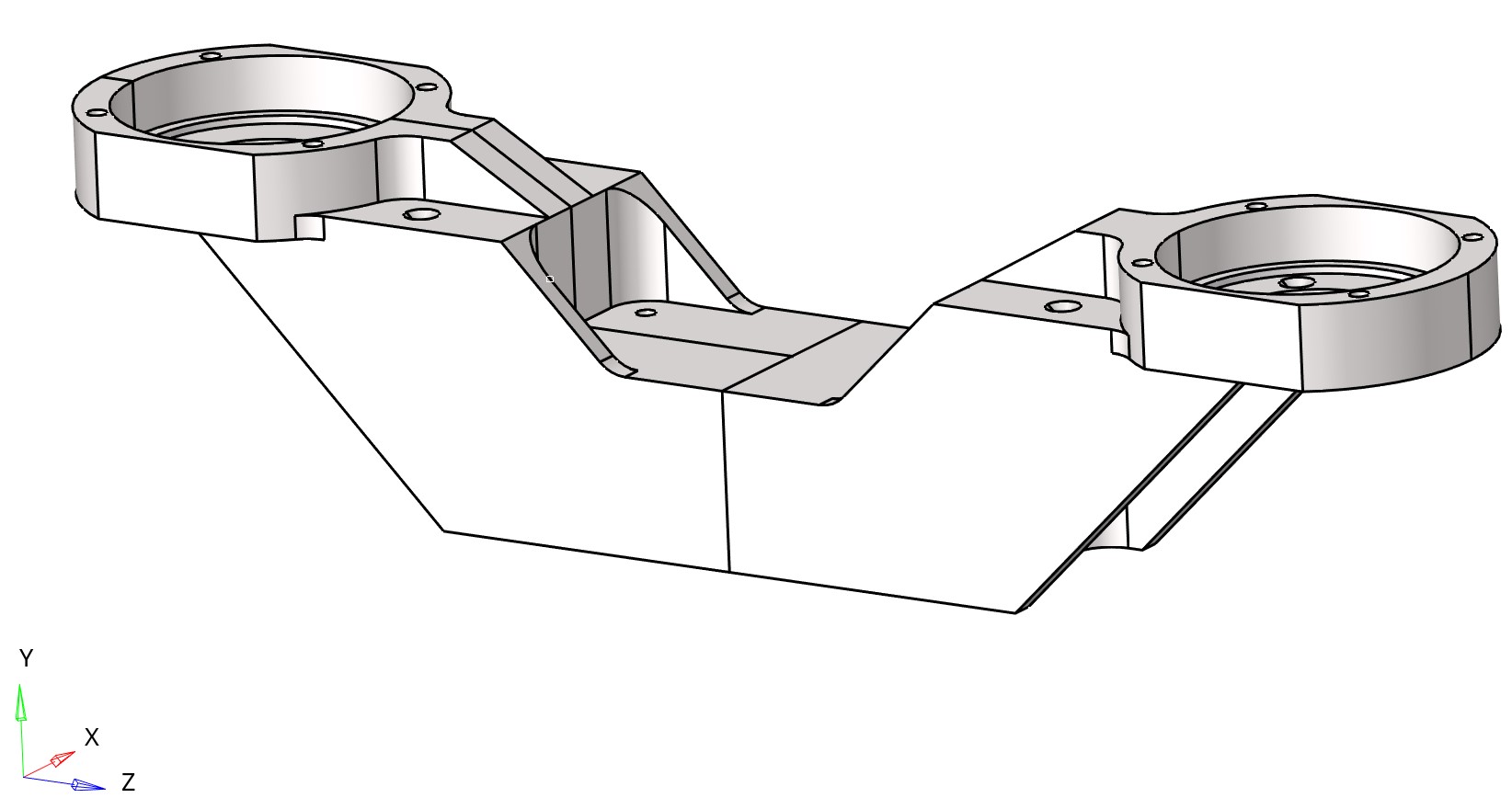
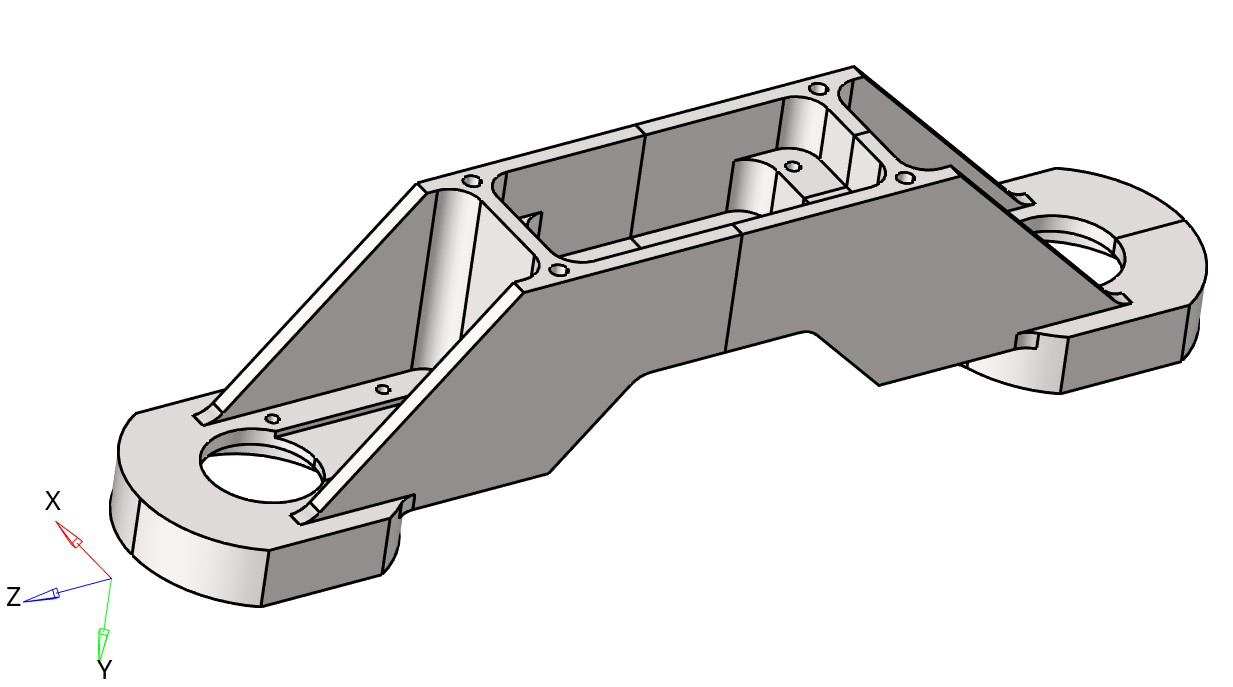
钢制「鳍」形支架
模型中的材料分布图:
钢制单元 |
铝制单元 |
构建有限元模型
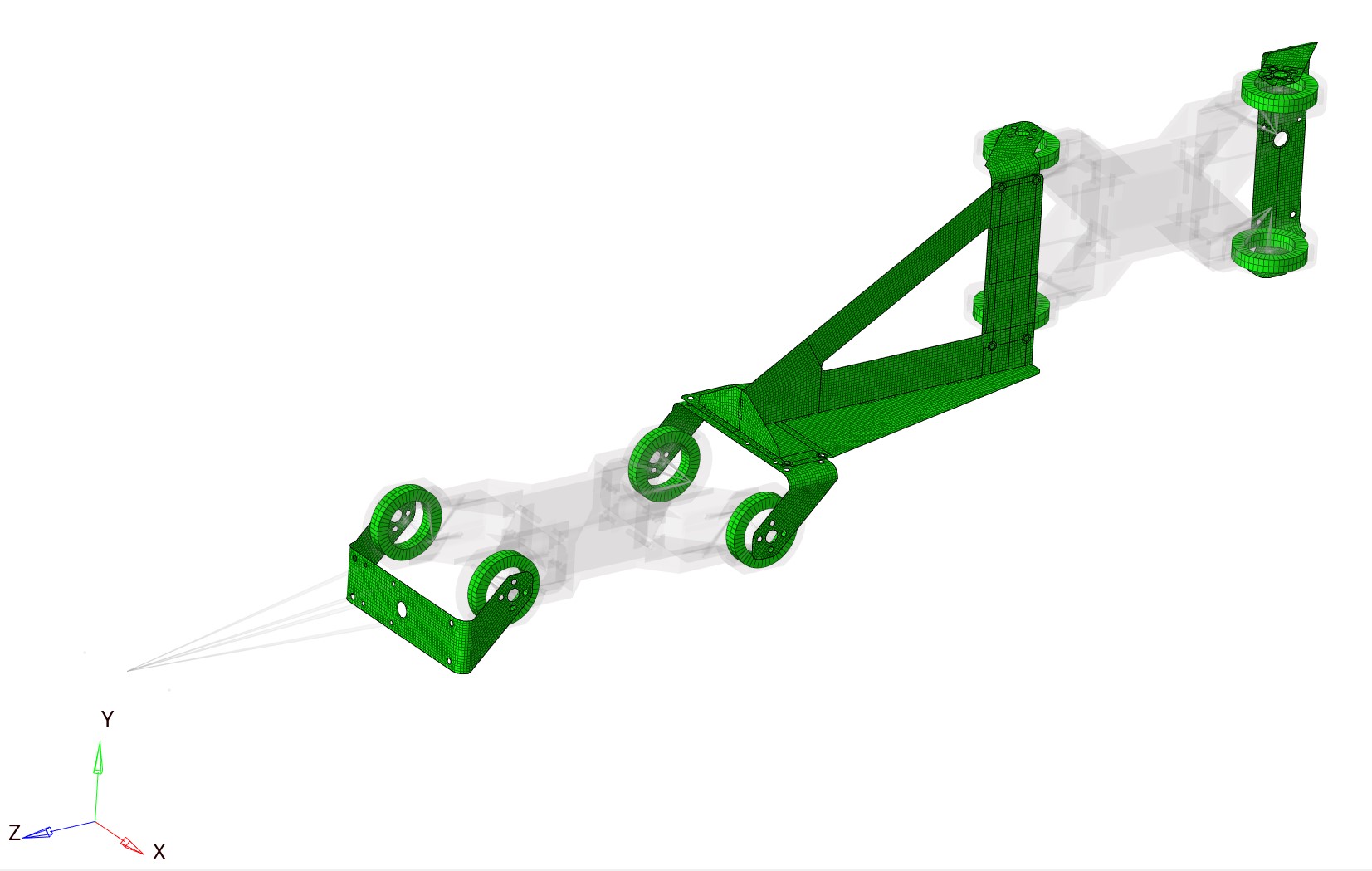
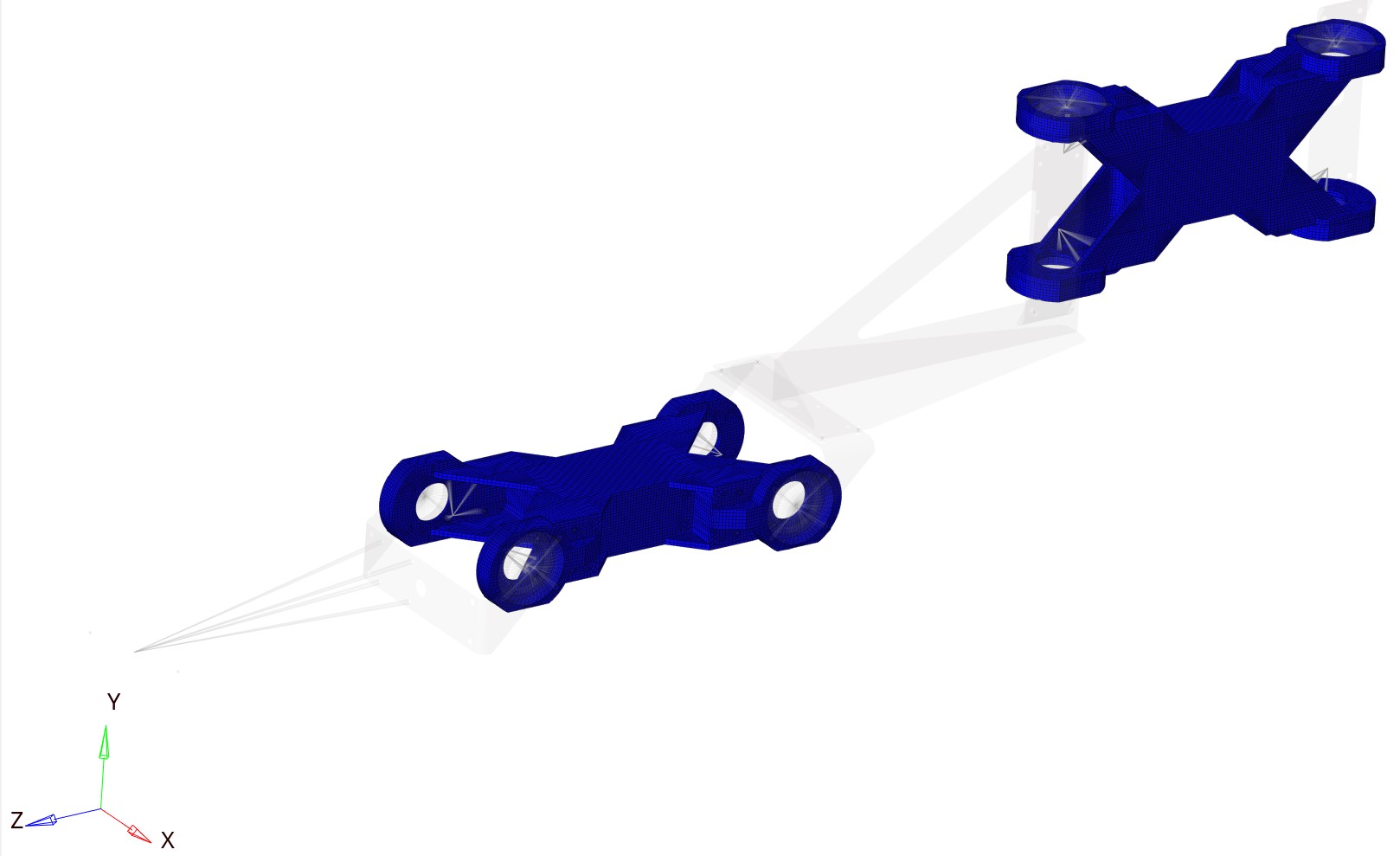
为创建有限元模型,必须对模型进行简化以加快计算速度。决定将底座视为绝对刚性,并用边界条件替代机械臂节点与底座的连接(即固定机械臂与底座的连接点)。同时决定用绝对刚性连杆替代机械臂最后一节连杆(夹爪组件)的建模。

图 8 — 有限元模型总览

图 9 — 模型中所使用的单元类型
由于零件的某一尺寸(厚度)<< 其他 2 个零件尺寸,决定采用平面 QUAD4 型单元对 U 形支架和「鳍」形支架进行建模。QUAD4 是一种平面 4 节点单元,每个节点具有 6 个自由度。

图 10 — 钢制 U 形支架的有限元模型 |

图 10 — 钢制 U 形支架的有限元模型 |

图 11 — 钢制「鳍」形支架的有限元模型
由于 HEX8 型实体单元比 tetra4 更精确,决定采用其对铝制支架和轴承进行建模。HEX8 是一种实体 8 节点单元,每个节点具有 3 个自由度。

图 12 — 铝制支架的有限元模型 |

图 12 — 铝制支架的有限元模型 |
力传递与螺栓连接的建模
为模拟从电机到支架和轴承的力传递,决定采用 RBE2 型单元进行建模。同时决定用 RBE2 替代连接各单元的螺栓。RBE2 是一种绝对刚性的有限单元(主节点的位移等于从节点的位移)。伺服电机的建模由 1 个 RBE2 单元替代,其中从节点为电机安装节点,主节点为轴承与钢制支架所用的 RBE2 单元。
螺栓建模有 4 种方法:
- 第一种方法:使用每个节点具有 6 个自由度的梁双节点有限单元对螺栓建模,并使用 RBE2 或 RBE3 单元将其节点绑定到表面。
- 第二种方法:在螺栓连接区域施加边界条件。
- 第三种方法:使用 RBE2 单元对螺栓建模。
- 第四种方法:使用六面体形式的实体八节点有限单元(每个节点具有 3 个自由度)对螺栓建模。采用此方法时,必须指定螺栓与零件之间的接触。这能够更精确地模拟螺栓连接的行为,但会使有限元模型变得复杂。
我们将采用第三种建模方法,以加快计算和优化速度。

图 14 — 伺服电机建模的有限元模型

图 15 — 替代螺栓的 RBE2 单元
接触相互作用的设置
在轴承与铝制支架之间,决定创建 Slide 型接触相互作用。为此,必须创建接触面并指定将要发生接触的表面。之后,必须配置 CONTACT:选择主表面(MASTER)和从表面(SLAVE)。两者的区别在于,在接触过程中,OPTISTRUCT 会检查从表面是否以点的形式与主表面的平面相交;若相交,OPTISTRUCT 将根据这些相交点计算接触区域。
应选择单元尺寸较大的表面作为主表面。同样重要的是指定 SRCHDIST 和 CLEARANCE(间隙)。第一个参数表示在多大距离内将表面视为接触,而第二个参数表示间隙。
在这些分析中,SLIDE 型接触是一种表面之间无摩擦的接触类型。还有一项附加的接触设置 N2S 或 S2S。第一种接触类型在计算性能方面最快,但对接触压力分布的呈现精度较低。第二种较为精确,但会显著减慢计算速度。

图 16 — 轴承与支架的接触相互作用
载荷工况的形成
为计算机械臂的静强度,必须确定加载模式。
我们将安全系数 K 定为 1.5。
垂直力的计算方式为:载荷质量 m 乘以重力加速度 g 再乘以安全系数 K:
$F_y = m cdot g cdot K = 16.18,text{N}$
$F_x = varepsilon cdot R cdot m cdot K = 6.73 text{N}$
$F_z = omega^2 cdot R cdot m cdot K = 72.49 text{N}$
$M_x = left(J_{x,mathrm{cg}} + m cdot d_1^2right) cdot K cdot varepsilon + F_y cdot l_1
= 651 text{N}cdottext{mm}$
$M_y = left(J_{y,mathrm{cg}} + m cdot d_2^2right) cdot K cdot varepsilon + F_x cdot l_2
= 635 text{N}cdottext{mm}$
$M_z = left(J_{z,mathrm{cg}} + m cdot d_3^2right) cdot K cdot varepsilon
= 133 text{N}cdottext{mm}$
符号参照表
| 符号 | 说明 | 计量单位 |
|---|---|---|
| Fy | 垂直力(重力) | N |
| Fx | 水平力(切向惯性力) | N |
| Fz | 纵向力(离心力) | N |
| Mx | 绕 X 轴的总力矩 | N·mm |
| My | 绕 Y 轴的总力矩 | N·mm |
| Mz | 绕 Z 轴的扭矩 | N·mm |
| m | 载荷质量 | t |
| g | 重力加速度 | mm/s² |
| K | 安全系数 | 无量纲 |
| ε | 角加速度 | rad/s² |
| ω | 角速度 | rad/s |
| R | 从旋转轴到载荷重心的距离 | mm |
| J_cg | 载荷绕其重心的转动惯量(带下标 x、y、z) | t·mm² |
| d | 从载荷重心到旋转轴的距离(带下标 1、2、3) | mm |
| l | 从力作用点到旋转轴的距离(带下标 1、2) | mm |
5 结果分析
分析结果如下:
| 载荷工况 | Fx | Fy | Fz | Mx | My | Mz |
|---|---|---|---|---|---|---|
| 最大位移(mm) | 1.03 | 1.05 | 0.62 | 0.12 | 0.17 | 0.03 |
| 最大应力(MPa) | 93 | 92 | 65 | 10 | 14 | 4 |
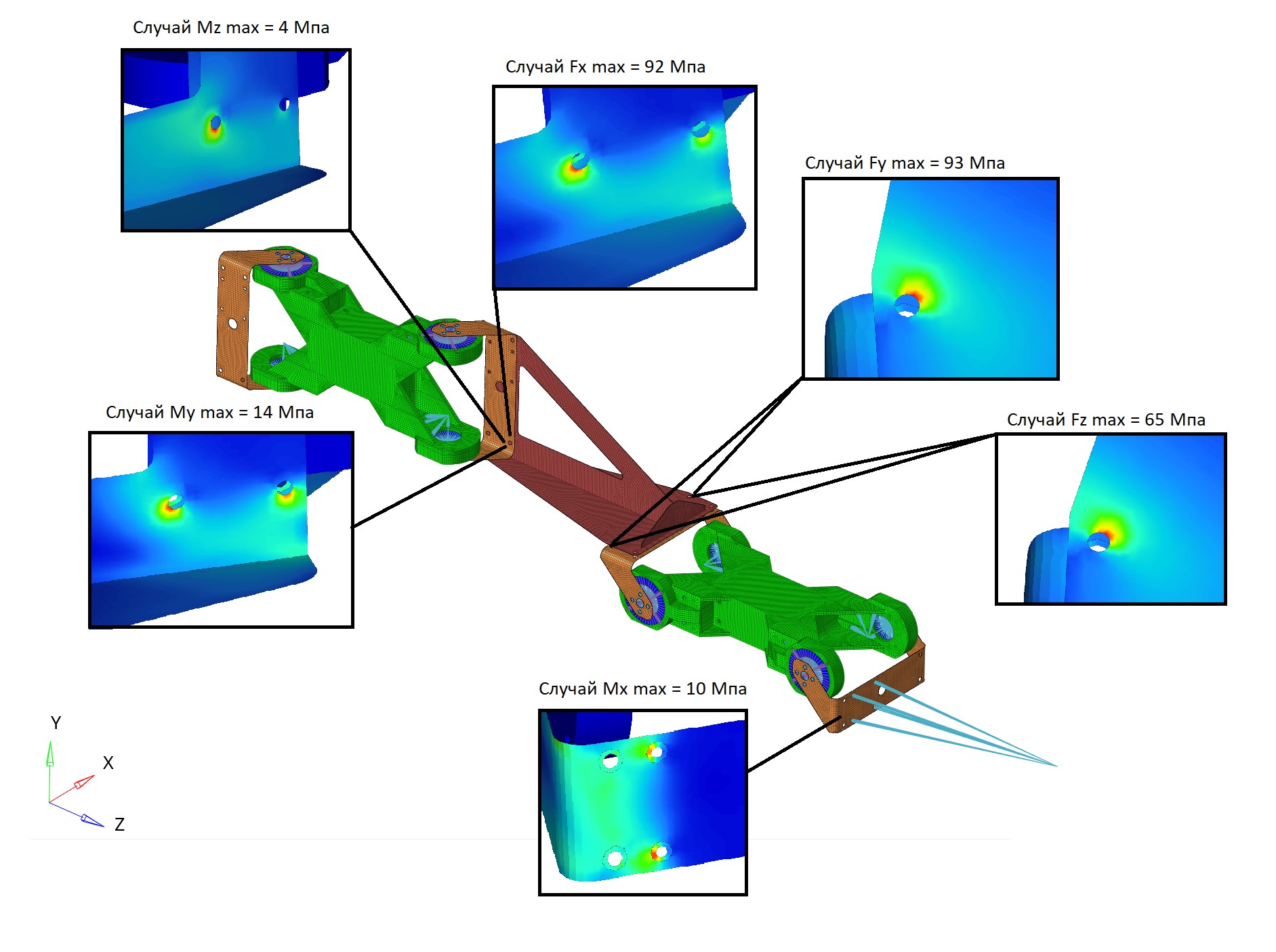
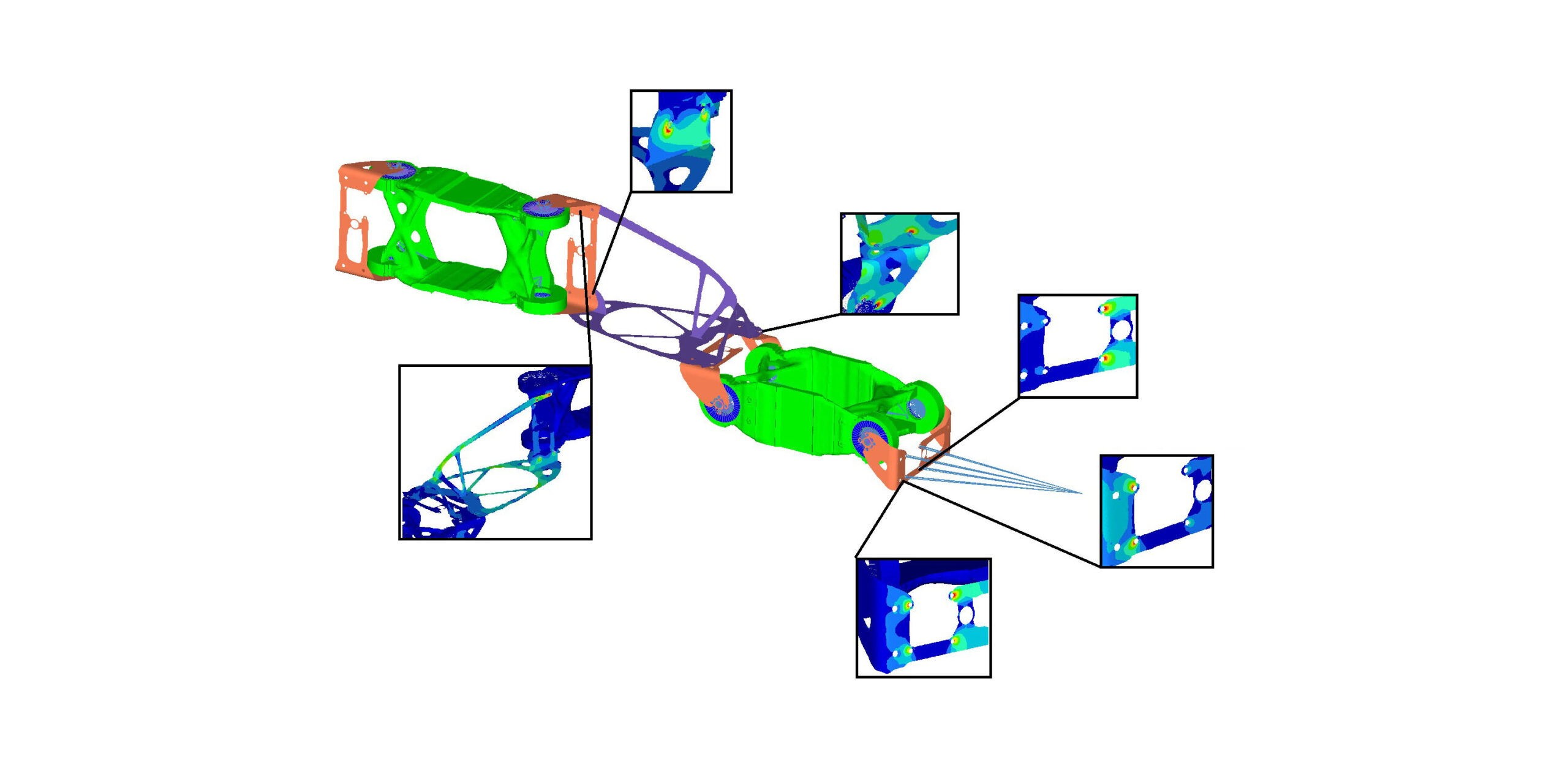
图 17 — 受载最严重区域的位置、载荷工况以及这些区域中出现的应力
最大应力出现在螺栓与零件的连接节点处。鳍形件承受的应力最高。
拓扑优化方法基础(采用 SIMP 算法)
优化方法分为两类 — 概念设计与改进。
概念层面的优化是指在设计过程的初始阶段进行优化(拓扑优化或形貌优化),以获得最佳形状,并以此为基础继续推进。
优化程序本质上将设计 — 分析 — 模型反馈 — 再设计的过程自动化。这使得可以在不改变整体拓扑的情况下,根据设计准则对结构进行修改。设计优化可以基于特定尺寸、形状或任意选定形状的优化。
拓扑优化与材料分布以及结构内部各单元的连接方式相关。它将每个单元的「等效密度」或伪密度视为设计变量。
SIMP 方法
拓扑优化方法能够确定在给定设计区域内材料的最优分布,使其符合给定的边界条件、加载模式,并满足所施加的附加约束。该方法的思想是确定设计区域中每一部分材料的最优分布。为此,将设计区域划分为 N 个单元。每个单元或者填充材料,或者为空。因此,不同组合的数量为 2^N,其中 N 为单元数量。
为采用 SIMP 方法求解优化问题,每个单元的材料密度在 0 到 1 的范围内连续变化,或从 $rho_{min} $ — 最小伪密度变化到 1:
$0 le rho_{min} le rho le 1$
在考虑这一条件的前提下,在求解目标函数的最小值时,材料密度会发生变化。为求解该问题,最好采用「惩罚法」,即对材料的弹性性能使用幂次表示,可表示为:
$E(rho_e) = rho_e^{p},E$
其中 E 为弹性模量,p 为「惩罚系数」,其始终大于 1;或对于单元刚度矩阵表示为:
$K(rho_e) = rho_e^{p},K$
其中 K 为单元刚度矩阵,p 为「惩罚系数」,其始终大于 1。
柔度与刚度
结构的整体刚度也可用作目标函数。这同样可视为在给定质量缩减下使柔度最小化。柔度是衡量结构整体可动性或「柔软度」的指标 — 它是刚度的倒数。总柔度等于各单元中应变能或弹性能之和。使总柔度最小化等价于使总刚度最大化。
优化算法通过迭代过程力求确定使结构整体柔度最小化的单元密度:
$C(rho) = sum_{i=1}^{N} rho_i^{p}, mathbf{u}_i^{mathsf{T}}, mathbf{k}_i, mathbf{u}_i$
其中 u 为第 i 个单元的位移向量,k 为第 i 个单元的刚度矩阵,ρ 为相应单元的伪密度。该方程的形式为:
$K,U = F$
其中 K 为刚度矩阵,U 为位移矩阵,F 为力向量。
可制造性考量
基于三维优化确定形状的结构,在许多情况下无法采用标准工艺进行制造。因此,在这种情况下,有必要对优化后结构几何形状的可制造性进行评估。此外,为解决这一问题,可以在优化过程中设定某些约束,从而有助于获得可通过各种传统生产工艺制造的几何形状。
因此,为按照上述算法进行优化,对于每个待优化的零件,都必须创建一个 Des space — 一个扩展的几何体,将在其中搜索最优设计。

图 18 — 钢制 U 形支架的 Des space |

图 19 — 铝制支架的 Des space |

图 20 — 钢制「鳍」形支架的 Des space
优化参数与约束
为进行优化,必须创建模型的变量或参数(响应),并据此对零件进行优化。我们创建 2 个系统响应或参数:
第一个参数 — wcompliance(加权柔度)。其关系式的形式为:
$C_w = sum_{i} W_i , C_i = frac{1}{2}sum_{i} W_i , mathbf{u}_i^{mathsf{T}} , mathbf{f}_i$
第二个参数 — 给定设计空间内的质量。该参数为我们提供设计区域的质量。它可以针对整个结构定义,也可以针对单个属性(组件)和材料,或针对属性(组件)和材料的分组进行定义。
除目标函数(即降低柔度)之外,还必须指定约束。 dconstrain 是求解器不应违反的约束。在计算中,质量与前一零件质量的差异不应超过 15%。这意味着每个设计区域的质量约束将各不相同。在该程序中,还可以指定对体积、相对体积或相对质量的约束。相对质量与相对体积的区别在于,相对质量在计算中包含整个模型的质量,而体积分数仅考虑设计区域。
为找到最优形状,必须创建一个目标函数。该函数即我们必须找到的极值。此处指定各种系统响应(位移、扭转角、应力等)。在本例中,我们指定 wcompliance 作为程序将要搜索其最小值的函数。
然后我们设置附加的优化约束。除质量之外的附加约束还包括 最大允许应力 150 MPa。该参数应低于材料的屈服强度,因为当达到屈服强度时,零件将发生塑性变形,可能导致非常严重的后果。应当理解,应力约束值将与按照 von Mises 理论计算的单元中的应力进行比较。
OptiStruct 中的制造约束
拓扑优化的问题在于,所得出的设计概念往往不可制造。另一个问题是,如果不采取适当措施,拓扑优化问题的解可能依赖于网格。
OptiStruct 提供了几种不同的方法,以在执行拓扑优化时考虑可制造性:
mindim — 控制在搜索拓扑时应保留的最小尺寸,同时最大限度地减少网格所产生的棋盘格效应,并提供更为离散的设计。由于优化要求单元取 1 或 0 的离散值,该约束通常通过消除原本可能形成的中间单元来提高设计的清晰度。
draw direction — 在铸造或铣削过程中,无法形成那些不开放且未沿模具滑动方向对齐的型腔。拓扑优化所得出的设计往往包含不适合铸造或铣削的型腔。将这样的设计方案转化为可制造的设计可能极为困难,甚至无法实现。
OptiStruct 允许设置 draw direction 约束,从而使某一拓扑允许模具沿给定方向滑动。
提供两种拔模选项:
- The “SINGLE” 选项假定将使用一个模具,沿给定的拔模方向运动。被铸零件的底面是模具预先定义的工作部分。
- The “SPLIT” 选项意味着将使用两个模具来铸造该 DTPL 卡片中所描述的零件,并沿给定的拔模方向分离。
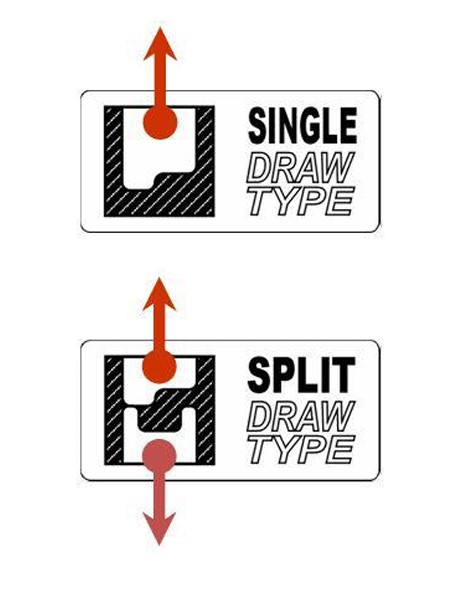
图 21 — draw single 与 draw split 之间的区别
在使用「SINGLE」拔模选项时,制造冲压件或钣金件时可能会受到约束。该参数加速了可解释为 3D 壳体、3D 设计区域的结构的演化。这使得能够从 3D 设计区域设计出 2D 壳体或冲压件,从而提供更大的设计灵活性。
零件不仅可以包含设计区域,还可以包含非设计区域。这些非设计区域必须被定义为该工艺的障碍。这样可以保留铸造最终设计的能力。还需注意,配合 draw direction 约束使用时存在默认的最小单元尺寸。该值定义为相应组件平均网格尺寸的三倍。因此,应选择模型的网格密度和所需的体积分数,使其有足够的材料来填充默认最小尺寸的单元。用户可以为每个结构部件指定所需的最小单元尺寸。
Pattern repetition — 是一种允许以特定方式连接各结构组件以形成相似拓扑图样的技术。
Pattern grouping — 关联变量以形成所需的结构形状。线性、平面、圆形、径向等。成形的结构单元由各个变量控制,从而确保设计与所需图样相符。单平面、双平面、三平面以及循环对称的 pattern grouping 选项也采用类似的方法,以确保在解中产生对称性。
钢制「鳍」形支架的优化结果
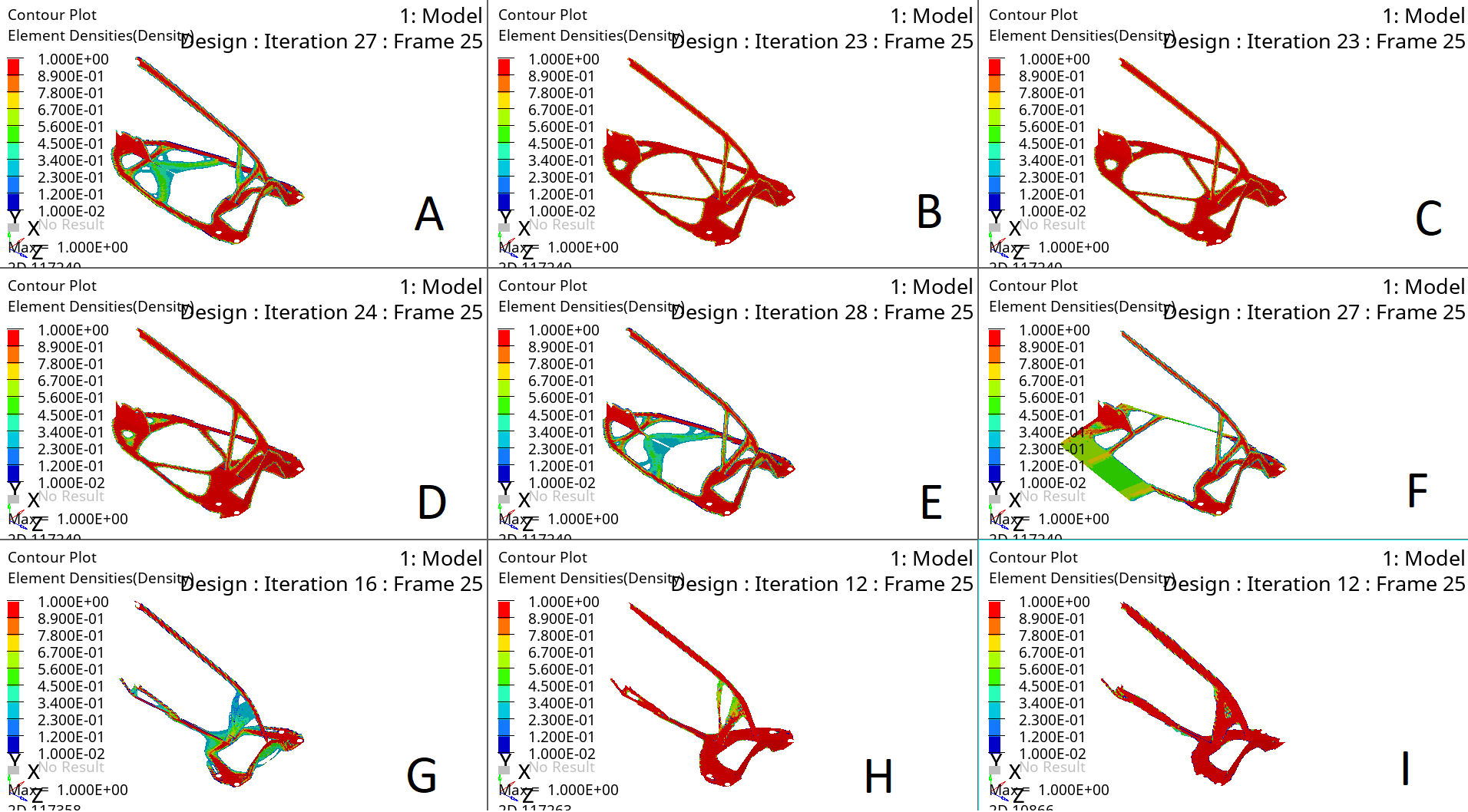
图 22 — 所获得的鳍形件优化方案
| A | B | C | D | E | F | G | H | I | |
|---|---|---|---|---|---|---|---|---|---|
| 材料 | 钢 | 钢 | 钢 | 钢 | 钢 | 钢 | 钢 | 钢 | 钢 |
| 厚度 | 8 | 6 | 5 | 4 | 3 | 6 | 15 | 8 | 6 |
| 载荷数量 | 6 | 6 | 6 | 6 | 6 | 2 | 1 | 1 | 1 |
从所获得的优化图样可以看出,支架的 YZ 平面负责机械臂绕 X 轴的弯曲刚度。建议将此壁的厚度增加到 6 mm;该部分对沿 Y 轴的刚度贡献最大。支架的 XZ 平面负责绕 Y 轴的弯曲,该平面可制成 3 mm 厚。具体轮廓及其勾勒的选择完全取决于工程师。红色区域是受载最严重的区域,而黄绿色边界表示可选区域,是否将其纳入由工程师决定。
钢制 U 形支架的优化结果
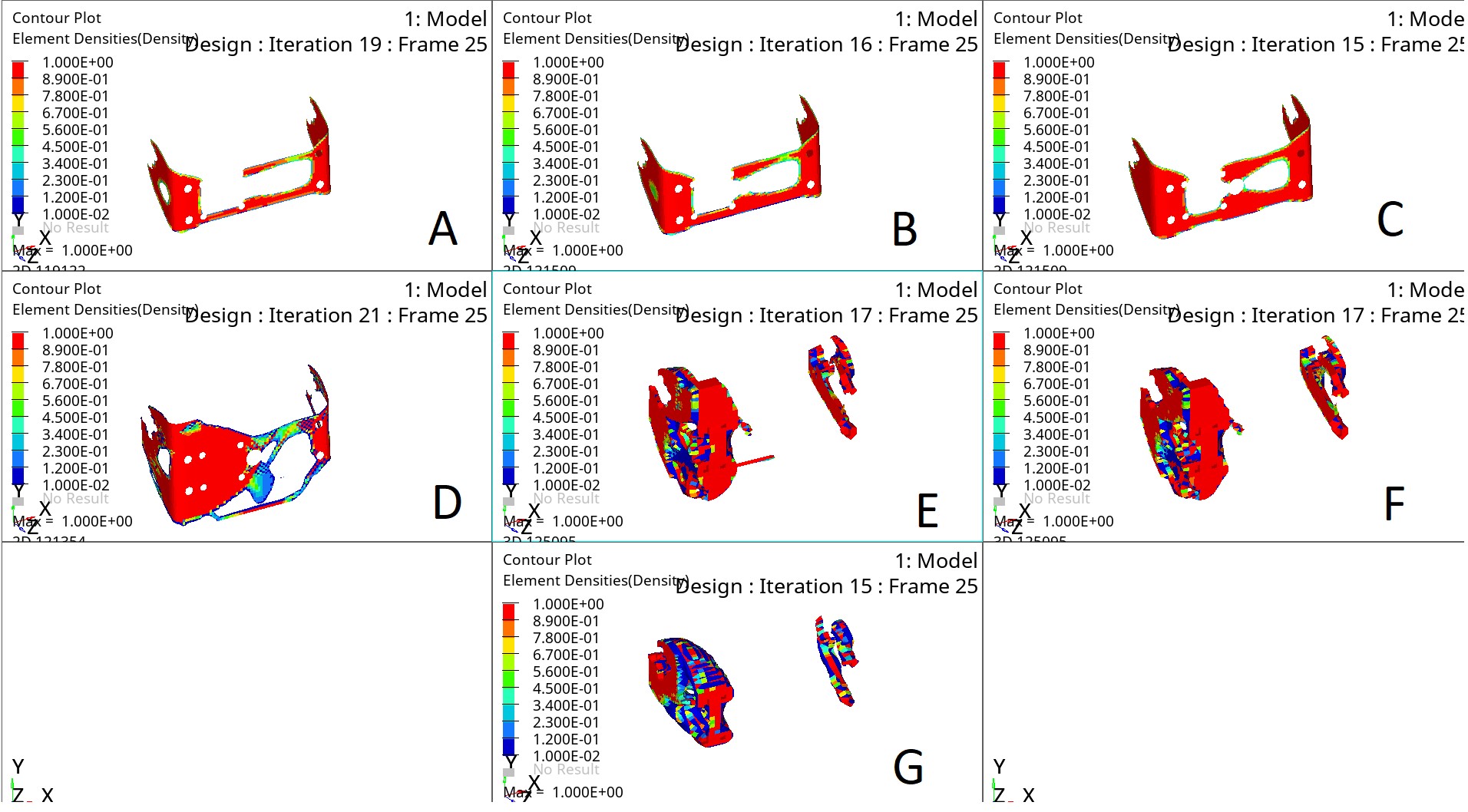
图 23 — 所获得的钢制 U 形支架优化方案
| A | B | C | D | E | F | G | |
|---|---|---|---|---|---|---|---|
| 材料 | 钢 | 钢 | 钢 | 钢 | 钢 | 钢 | 钢 |
| 厚度 | 8 | 6 | 5 | 3 | |||
| 载荷数量 | 6 | 6 | 6 | 1 | 1 | 1 | 1 |
从所获得的钢制 U 形支架优化图样可以看出,中央孔不受载。同时建议扩大支架底座并将厚度增加到 6 mm。
铝制支架的优化结果
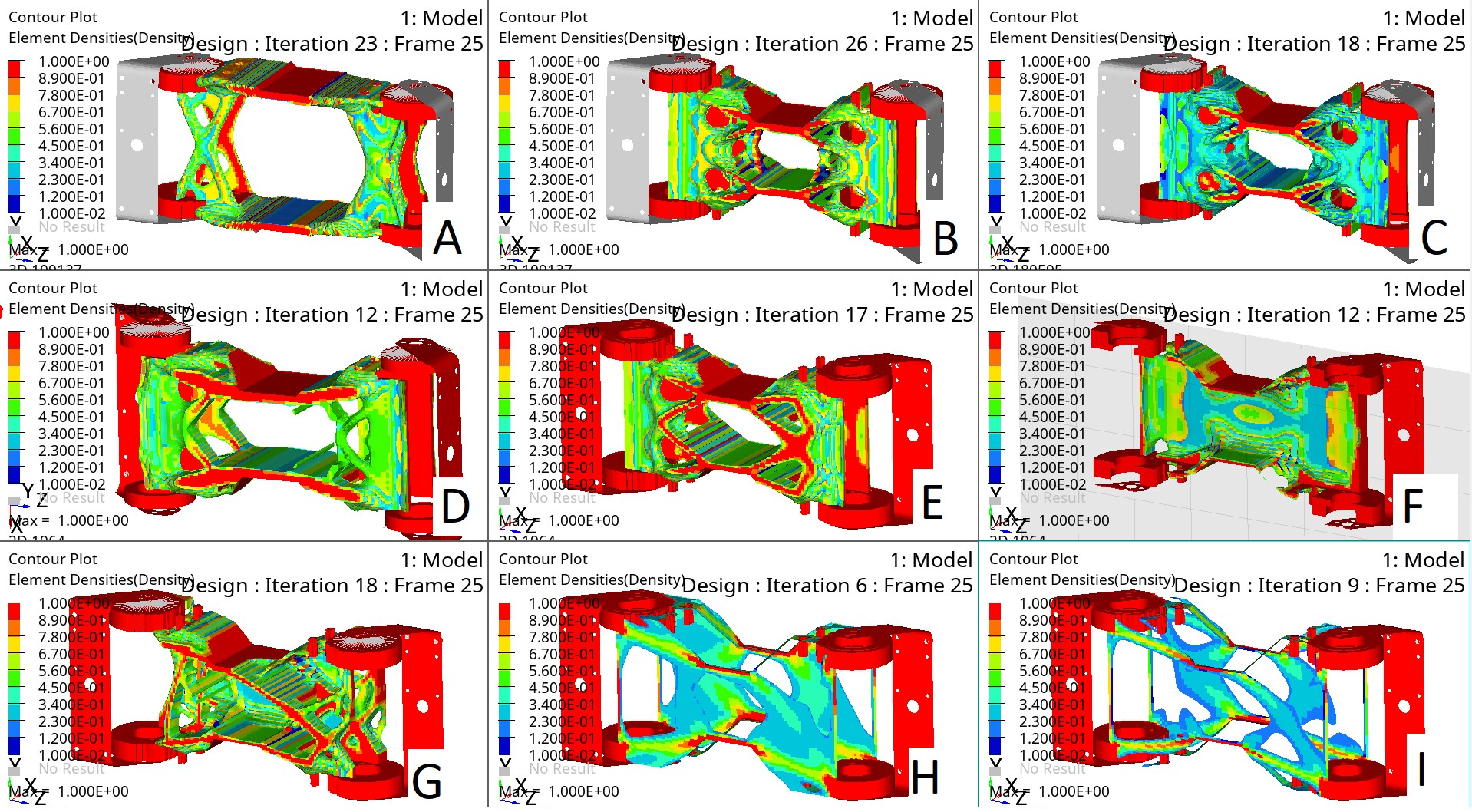
图 24 — 所获得的铝制支架优化方案
| A | B | C | D | E | F | G | H | I | |
|---|---|---|---|---|---|---|---|---|---|
| 材料 | 铝 | 铝 | 铝 | 铝 | 铝 | 铝 | 钢 | 钢 | 钢 |
| 对称性 | yes | yes | yes | yes | yes | yes | no | yes | yes |
| 载荷数量 | 6 | 6 | 6 | 6 | 2 | 2 | 1 | 1 | 1 |
从所获得的优化图样可以看出,由于质量过小,无法将铝制支架替换为钢制支架。大多数优化图样表明,最好将质量沿壁分布。对此有一个解释。由于机械臂承受弯曲作用,优化器力求获得最优的弯曲截面形状,即工字梁。因为中央部分受载不足,而最外侧部分对刚度的贡献最大。

图 25 — 弯曲刚度最高的截面
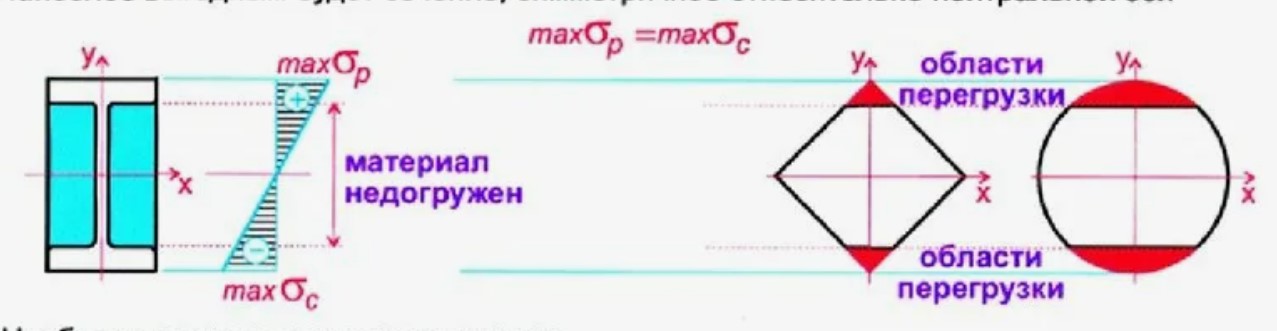
图 25 — 弯曲刚度最高的截面
校核分析
在选定形状后,必须进行校核分析:

图 26 — 优化后结构的有限元模型
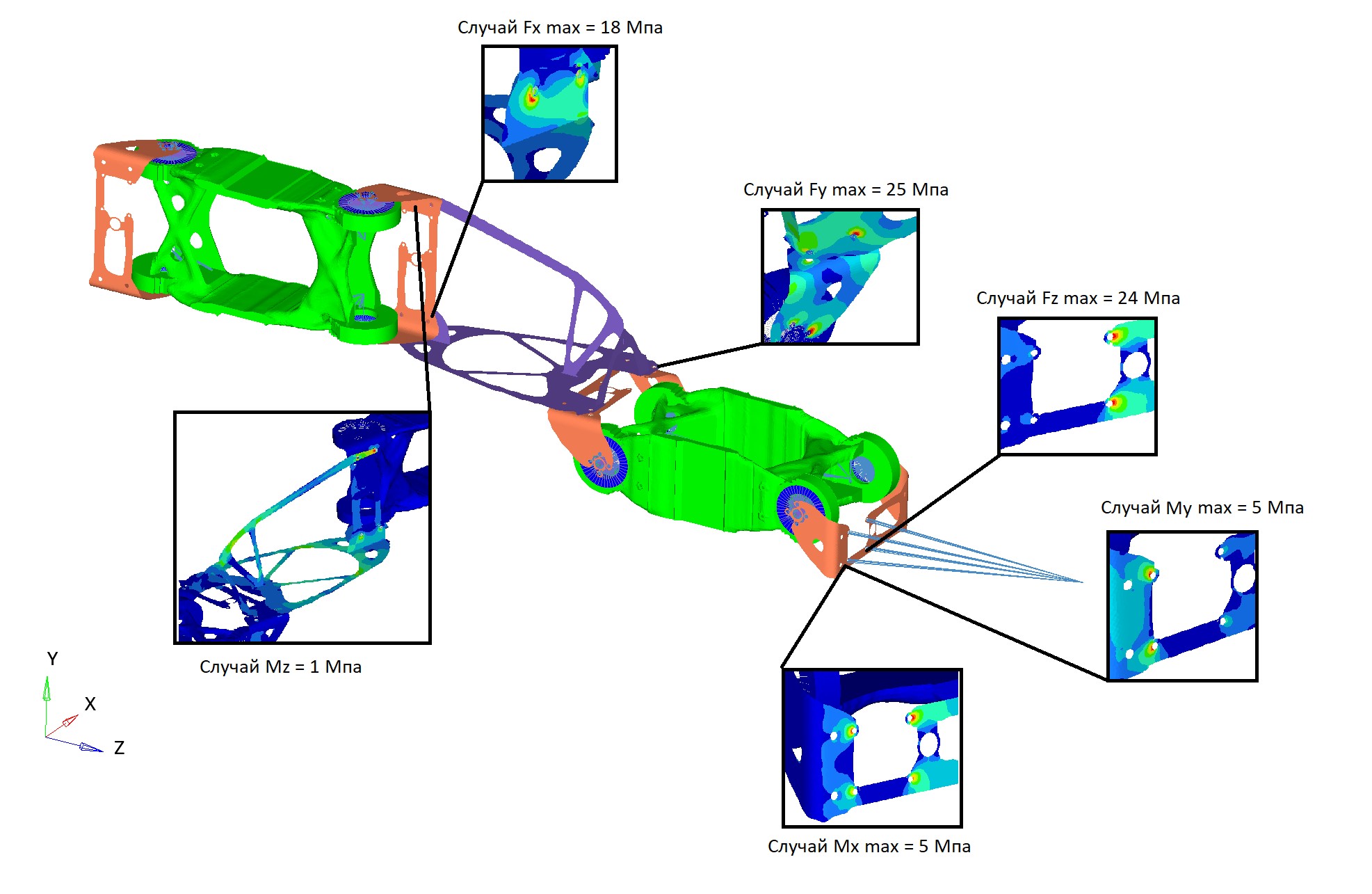
图 27 — 所获得的优化后结构计算结果
优化后设计的结果
| 载荷工况 | Fx | Fy | Fz | Mx | My | Mz |
|---|---|---|---|---|---|---|
| 最大位移(mm) | 0.41 | 0.31 | 0.21 | 0.04 | 0.05 | 0.01 |
| 最大应力(MPa) | 18 | 25 | 24 | 5 | 5 | 1 |
最大应力出现在螺栓与零件的连接节点处。

图 28 — 结构刚度得到提升的机械臂最终版本
对比:原始设计与优化后设计
| 参数 | 原始设计 | 优化后设计 |
|---|---|---|
| 质量 | 1.937 kg | 2.376 kg |
| 最大应力 | 93 MPa | 25 MPa |
| 由 Fy 引起的挠度 | 1.05 mm | 0.41 mm |
| 由 Fx 引起的挠度 | 1.03 mm | 0.31 mm |
| 由 Fz 引起的挠度 | 0.62 mm | 0.21 mm |
| 由 Mx 引起的挠度 | 0.12 mm | 0.04 mm |
| 由 My 引起的挠度 | 0.17 mm | 0.05 mm |
| 由 Mz 引起的挠度 | 0.03 mm | 0.01 mm |
结论
技术要求未能满足; to ensure 所要求的刚度,允许的质量应在当前值基础上增加 15% 以上。实现了显著的刚度改善:通过对关键结构单元的拓扑优化,实现了柔度的降低。机械臂的位移根据载荷工况降低了 57–76%。
未能达到目标指标:尽管有显著改善,机械臂末端的最终挠度(最大位移 0.41 mm)仍超过了技术要求所规定的值(不超过 0.3 mm)。因此,技术规范的主要要求未能完全满足。
为达成所要求参数的建议
为达成所要求的参数,可考虑以下方案:
- 提高允许的质量,超出当前 15% 的约束
- 增加非相同结构单元的数量,使从机械臂安装底座起的每个后续结构单元更轻
- 将铝制支架替换为钢制支架 — 由于铝的弹性模量为 70 GPa,而钢为 200 GPa,在相同载荷下这将使零件的刚度提高 2.5 倍
- 考虑替代材料,其弹性模量高于铝且密度低于钢
- 将质心尽可能靠近底座,以减小转动惯量
优化方法的有效性
拓扑优化方法的应用已证明其在给定设计区域(Des space)内寻找材料最优分布方面的有效性。该方法使我们能够识别零件的受载区与非受载区,并就改变其几何形状提出具体建议。然而,所得方案的可制造性并非最佳。
所获得的具体设计方案
对于三个优化后的支架,均获得了若干方案,并以此为基础开发了新的几何形状。需要理解的是,在勾勒结构单元时,由于所获得形状的边界不清晰,质量会大于计算值,而在勾勒时则会设定清晰的边界。
For the steel U-shaped bracket: 建议扩大底座,并将负责弯曲刚度的壁厚增加到 6 mm。
For the aluminum bracket: 优化器表明了将质量沿壁分布、力求工字梁形状的合理性。
For the steel “fin” bracket: 建议将竖直壁的厚度增加到 6 mm。底座可保持 3 mm,或增加到 6 mm 厚。
强度校核
对优化后结构的校核分析表明,零件中的最大应力显著降低(从 93 MPa 降至 25 MPa),远低于材料的屈服强度,并提供了更高的安全裕度。同时,满足了质量约束(增加不超过 15%)。
最终总结
获得了刚度和强度更高的机械臂结构,但其仍未完全满足挠度 ≤ 0.3 mm 的初始要求。所获得的结果和方法论为旨在完全满足技术要求的进一步设计迭代奠定了坚实的基础,这可能通过采用刚度更高的材料或对运动学方案进行额外修改来实现。
请问提升刚性是优先换材料还是优先改结构 比如加筋和换铝型材哪个收益更大
通常先改结构收益更大也更便宜。合理的加筋、增大截面惯性矩、缩短力臂往往比单纯换材料更有效。结构优化到位后再考虑用铝合金或碳纤进一步提升。
帮助很大,谢谢。
想问下用碳纤维管做连杆比铝管刚性提升明显吗 还是说重量轻了但是刚度其实差不多
碳纤维管的比刚度(刚度重量比)明显优于铝管,同等重量下刚度更高,或同等刚度下更轻。但接头连接处是难点,处理不好容易在节点失效,反而限制整体刚性。
现在清楚了,谢谢。
关节刚度比连杆刚度更要命。减速器背隙是大头。
刚性这块太关键了 我的臂末端一加载就肉眼可见的变形