Повышение жёсткости конструкции 6DOF-манипулятора
 2005
2005
Аннотация
В статье представлен комплекс конструкторских и инженерных работ по обеспечению прогиба манипулятора не более 0,3 мм. Объект исследования — робототехнический манипулятор. Цель НИОКР — оптимизировать конструкцию следующих компонентов манипулятора:
- Алюминиевый кронштейн
- Стальной П-образный кронштейн
- Стальной кронштейн «плавник»
Результаты выполненной работы:
По результатам оптимизации кронштейнов разработана уточнённая электронная модель манипулятора, а сам манипулятор рассчитан на статическую прочность при максимальной перегрузке от двигателей. Сформирован перечень предложений по доработке конструкции. Разработана электронная модель оптимизированной конструкции, включая поверочные расчёты.
Полностью достичь требуемой жёсткости не удалось. Однако жёсткость конструкции значительно повысилась:
- Перемещение от вертикальной нагрузки уменьшилось на 57%
- Перемещение от горизонтальной нагрузки по оси X уменьшилось на 65%
- Перемещение от горизонтальной нагрузки по оси Z уменьшилось на 66%
- Перемещение от момента относительно оси X уменьшилось на 66%
- Перемещение от момента относительно оси Y уменьшилось на 76%
- Перемещение от момента относительно оси Z уменьшилось на 67%
Сокращения и обозначения
| Сокращение | Расшифровка |
|---|---|
| TOR | Технические требования |
| EM | Электронная модель |
| FE | Конечный элемент |
| FEM | Конечно-элементная модель |
| SSS | Напряжённо-деформированное состояние |
| CG | Центр тяжести |
| CS | Система координат |
Введение
В качестве исходных данных для анализа конструкции манипулятора Заказчик предоставил контур, выполненный в поверхностях, а также ЭМ манипулятора в сложенном виде. В рамках работы проведён анализ манипулятора и повышены жёсткостные свойства конструкции, способной выдерживать действующие на неё статические нагрузки и перегрузки от двигателей при минимально возможной массе.
В качестве исходных данных для оптимизации конструкции манипулятора Заказчик предоставил ЭМ манипулятора. В рамках работы конструкция доработана и рассчитана на статическую прочность при перегрузках, а также разработаны рекомендации по доработке.
Формирование концепции манипулятора
В рамках работы требовалось оптимизировать конструкцию манипулятора. Согласно техническим требованиям, основные требования к конструкции манипулятора таковы:
- Конструкция должна выдерживать статическую нагрузку от груза массой 1,1 кг
- Прогиб наконечника манипулятора не должен превышать 0,3 мм
- Допустимое увеличение массы — не более 15%
- Необходимо сохранить текущие углы изгиба, равные 270° на сустав
- Не увеличивать число уникальных (изготавливаемых на заказ) деталей
Описание основных элементов манипулятора
Требование по жёсткости предполагается выполнить за счёт изменения формы кронштейнов в основной части манипулятора.
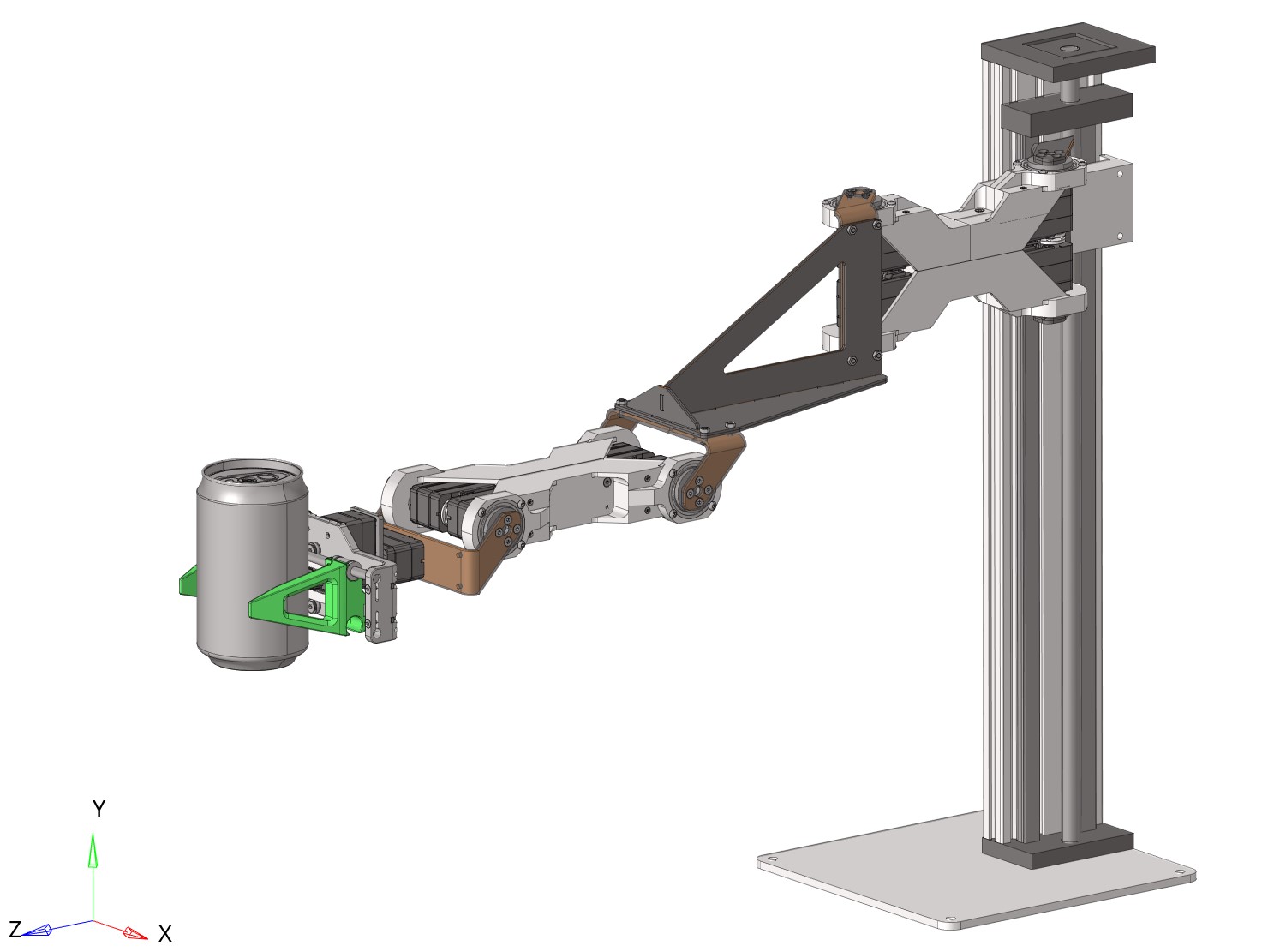
Общий вид манипулятора 1 |
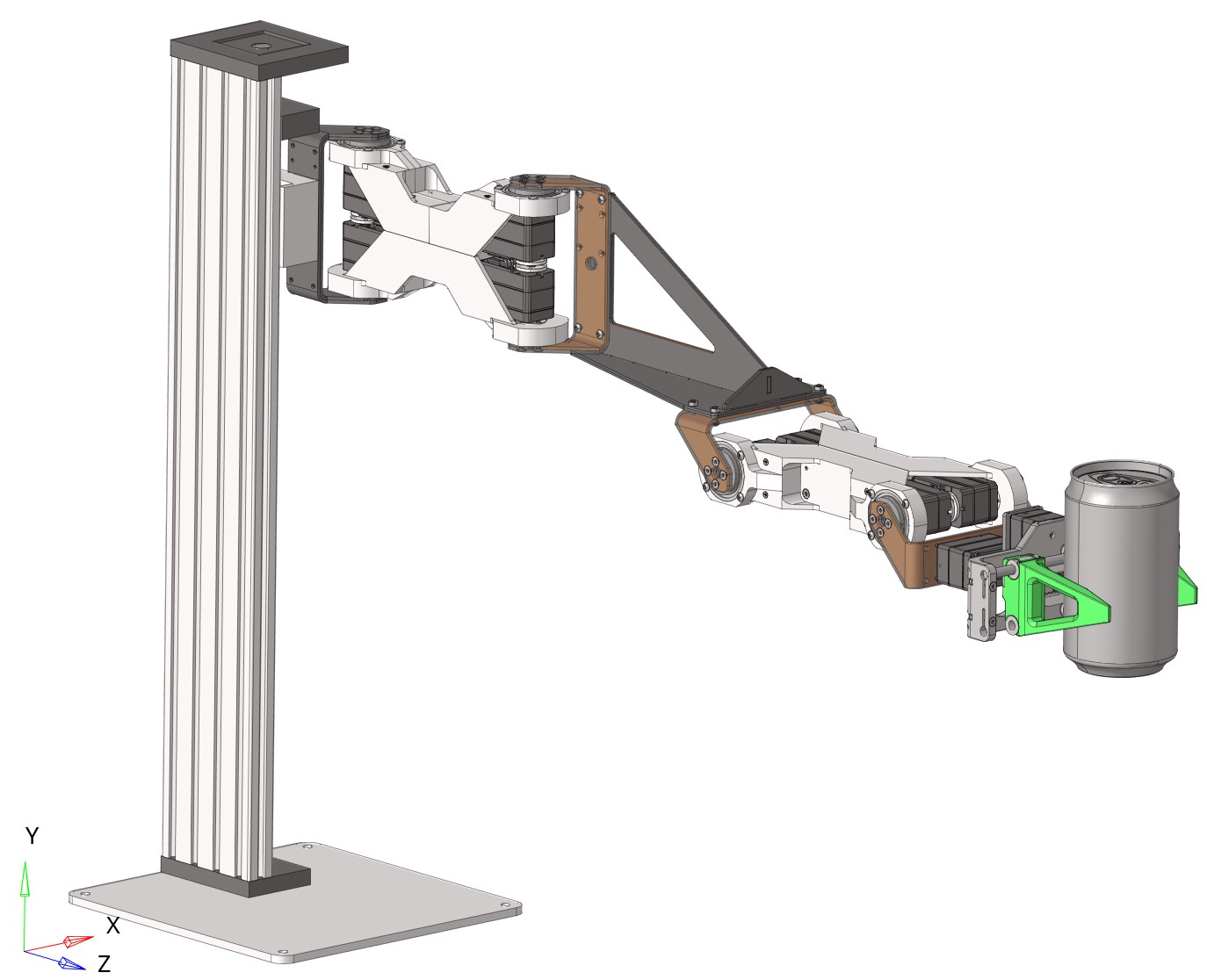
Общий вид манипулятора 2 |
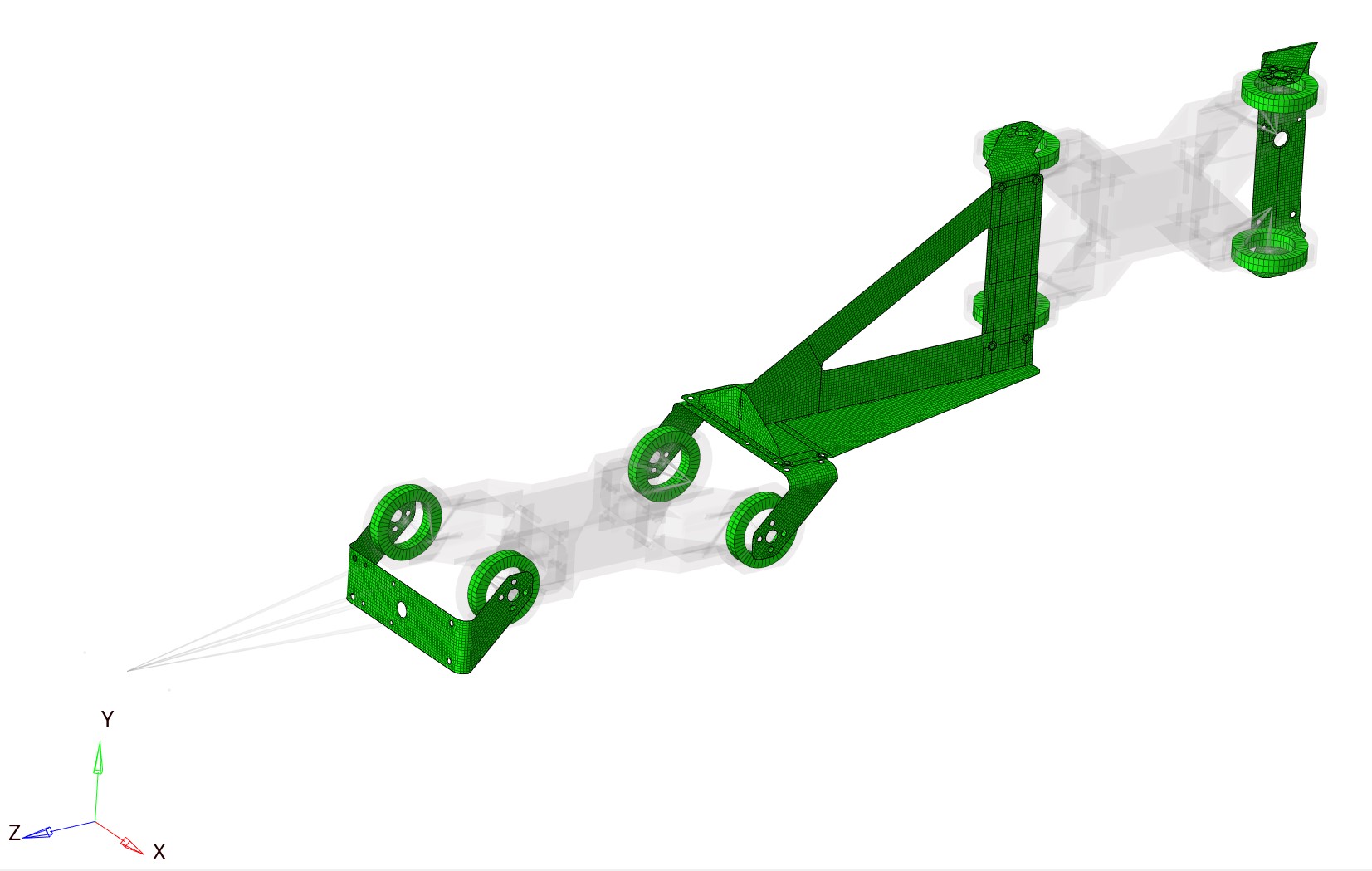
Как видно из рисунка 1, конструкция манипулятора состоит из стойки (рисунок 2), 4 стальных П-образных кронштейнов (рисунок 3), 4 алюминиевых кронштейнов (рисунок 4), 1 стального кронштейна «плавник» (рисунок 5) и 10 сервоприводов.
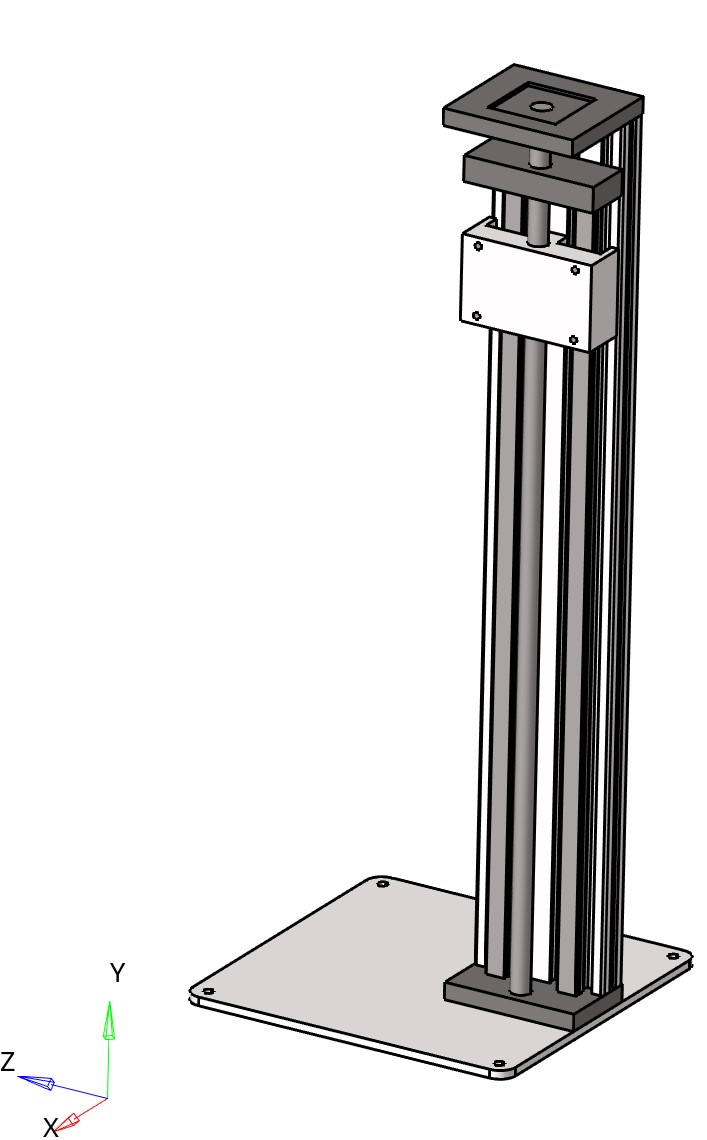
Общий вид стойки
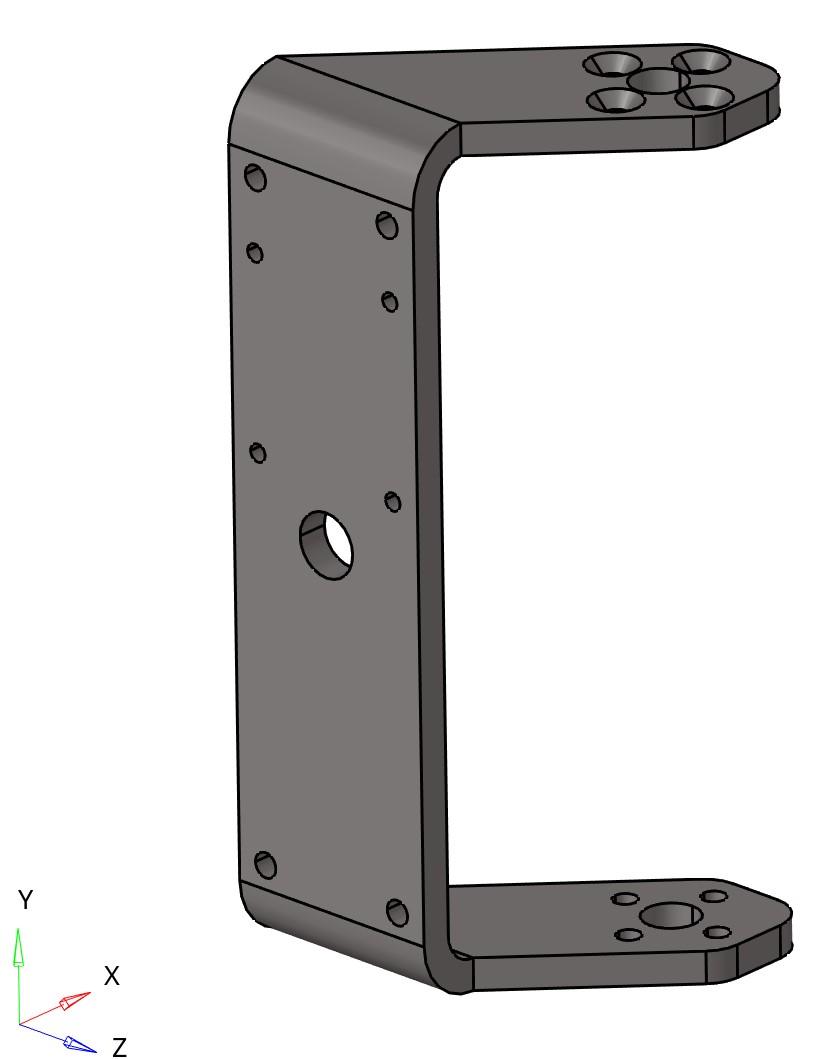
Стальной П-образный кронштейн 1 |
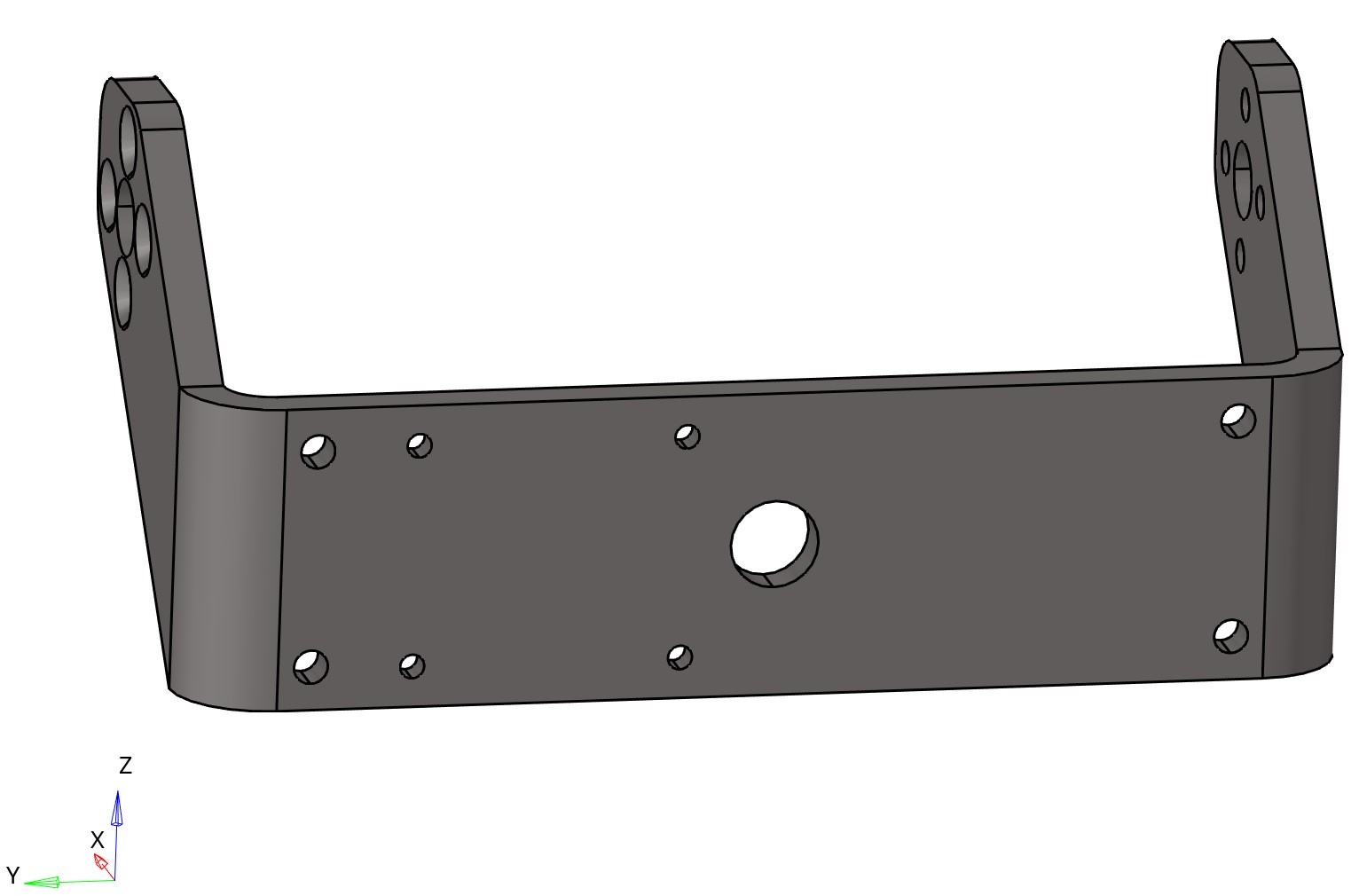
Стальной П-образный кронштейн 2 |
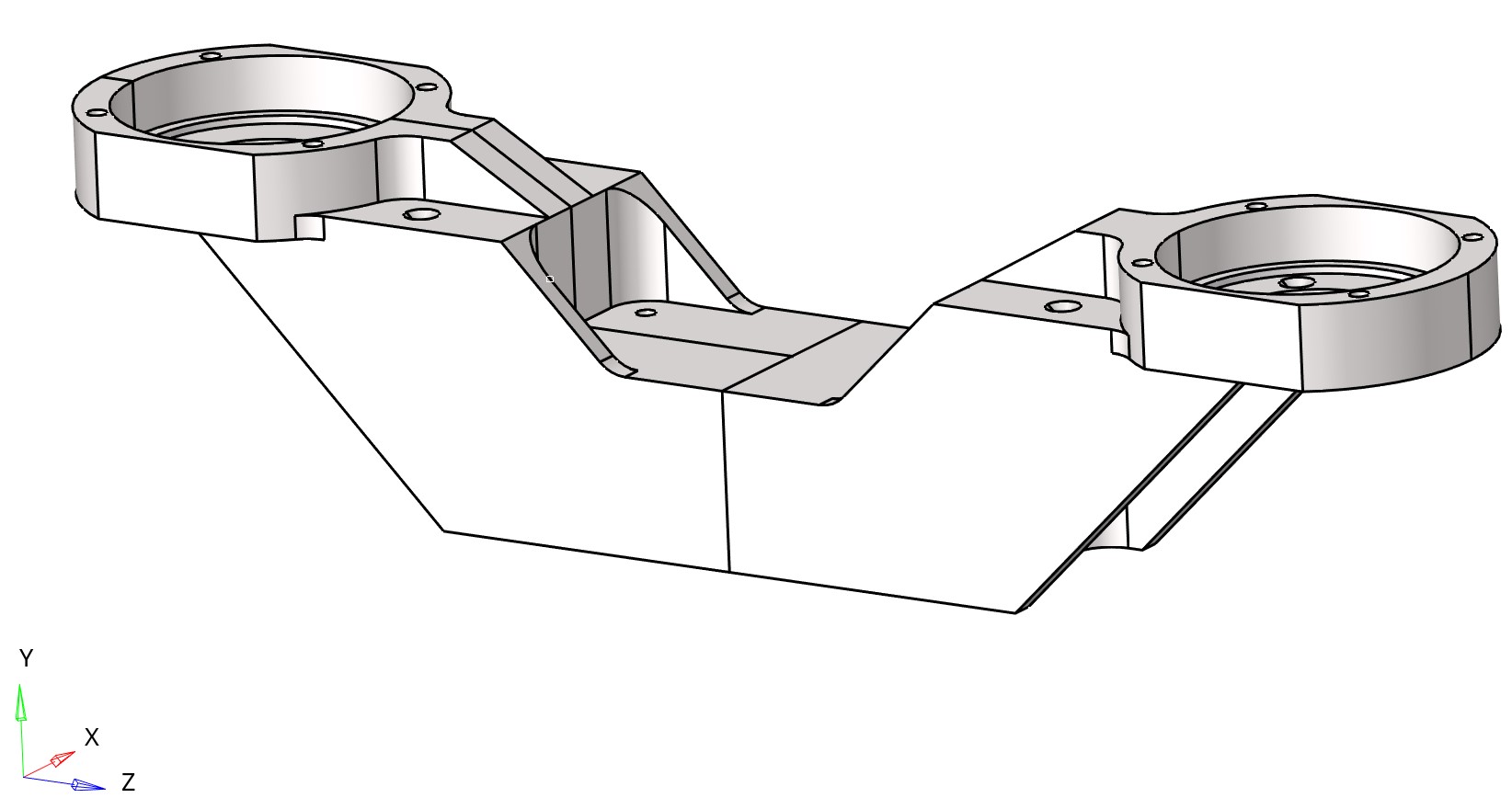
Алюминиевый кронштейн 1 |
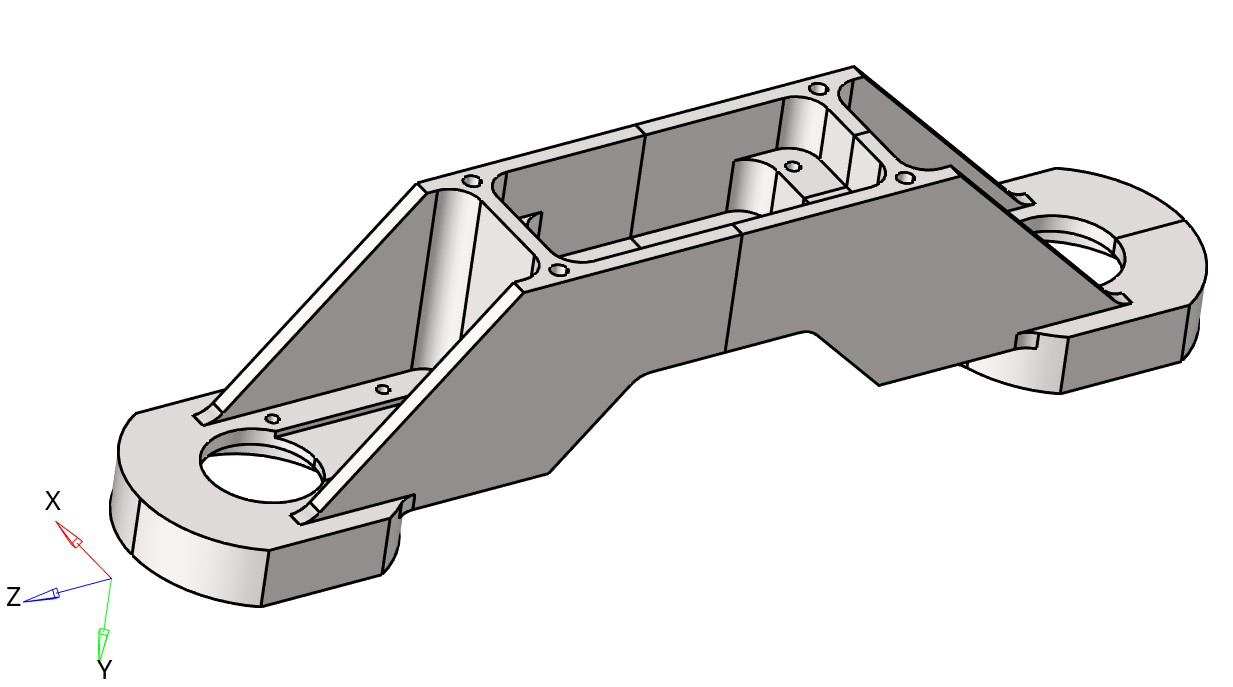
Алюминиевый кронштейн 2 |
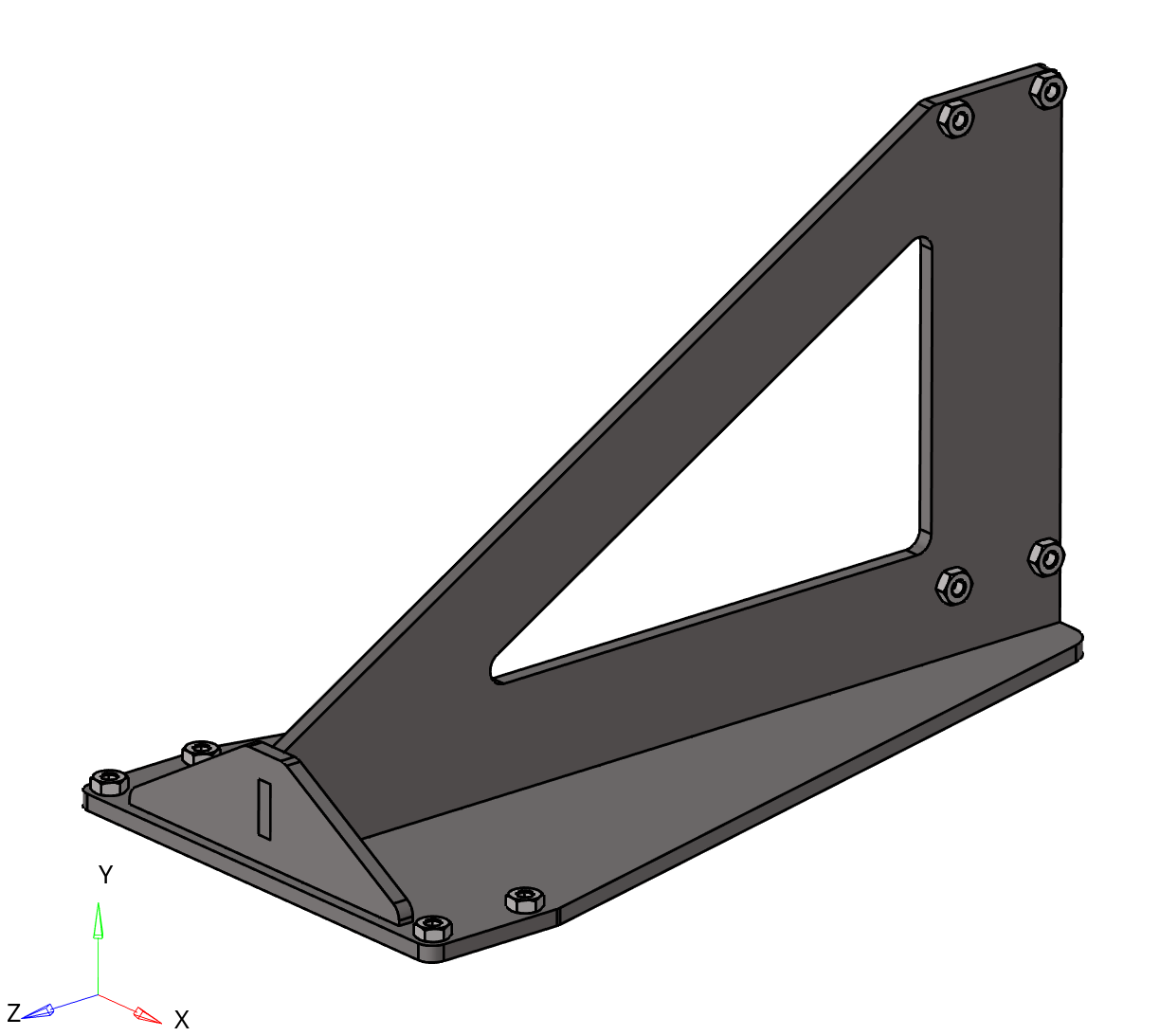
Стальной кронштейн «плавник»
Карта распределения материалов в модели:
Стальные элементы |
Алюминиевые элементы |
Построение конечно-элементной модели
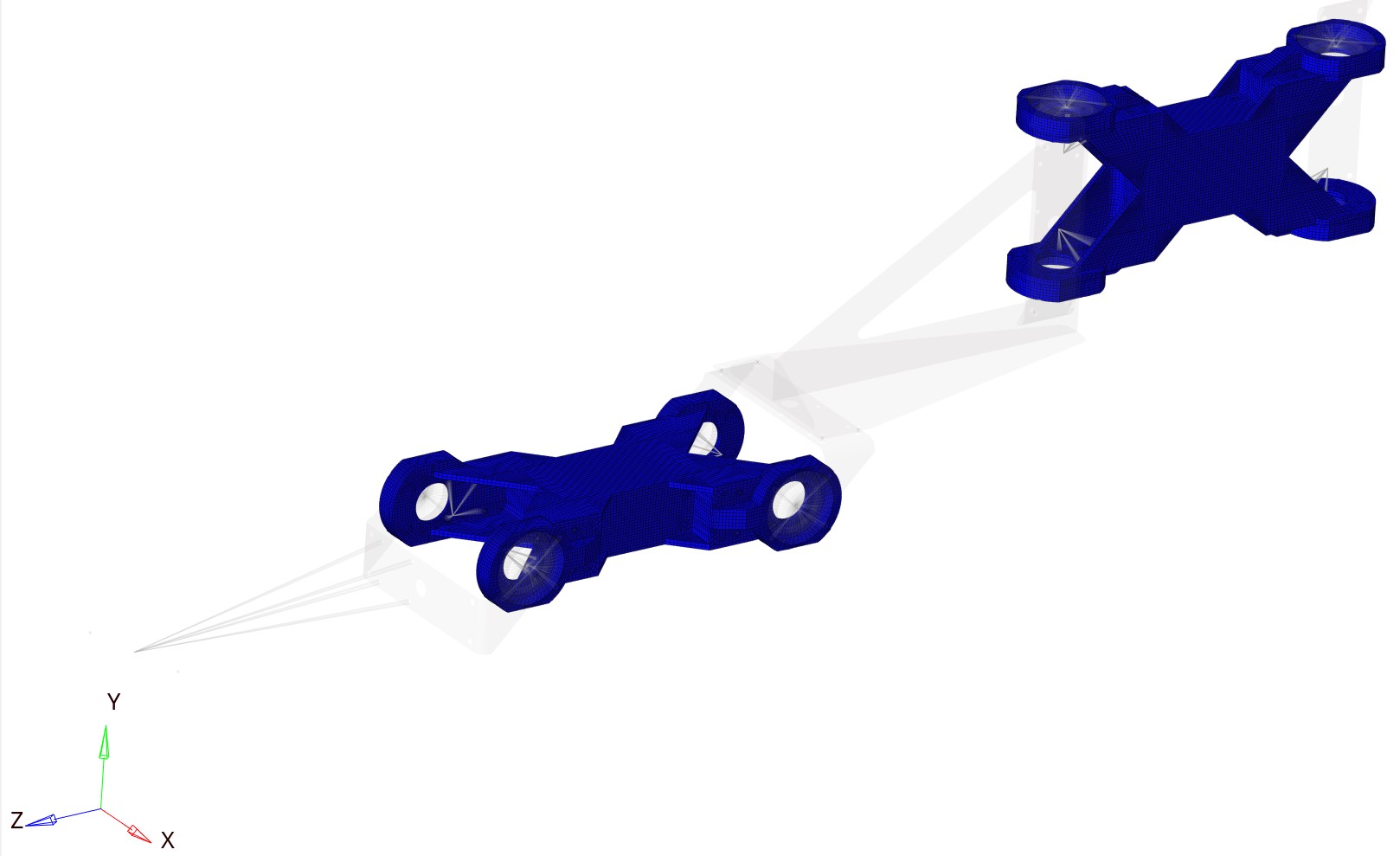
Для создания КЭМ необходимо упростить модель для ускорения расчёта. Стойку решено считать абсолютно жёсткой и заменить крепление узлов манипулятора к стойке граничными условиями (закрепив точки крепления манипулятора к стойке). Также решено заменить моделирование последнего звена манипулятора (узла захвата) абсолютно жёстким звеном.

Рисунок 8 — общий вид КЭ-модели

Рисунок 9 — типы элементов, использованные в модели
П-образный кронштейн и кронштейн «плавник» решено моделировать плоскими элементами типа QUAD4, поскольку один из размеров детали (толщина) много меньше двух других. QUAD4 — плоский 4-узловой элемент с 6 степенями свободы в узле.

Рисунок 10 — КЭМ стального П-образного кронштейна |

Рисунок 10 — КЭМ стального П-образного кронштейна |

Рисунок 11 — КЭМ стального кронштейна «плавник»
Алюминиевый кронштейн и подшипник решено моделировать объёмными элементами типа HEX8, так как они точнее, чем tetra4. HEX8 — объёмный 8-узловой элемент с 3 степенями свободы в узле.

Рисунок 12 — КЭМ алюминиевого кронштейна |

Рисунок 12 — КЭМ алюминиевого кронштейна |
Моделирование передачи усилий и болтовых соединений
Для моделирования передачи усилий от двигателей к кронштейну и подшипнику решено использовать элемент типа RBE2. Болты, соединяющие элементы, также решено заменить на RBE2. RBE2 — абсолютно жёсткий конечный элемент (перемещение ведущего узла равно перемещению ведомых узлов). Моделирование сервомотора заменяется одним элементом RBE2, где ведомые узлы — точки крепления двигателя, а ведущий узел — элемент RBE2 для подшипника со стальным кронштейном.
Есть 4 способа моделирования болтов:
- Первый способ: моделировать болты двухузловым балочным конечным элементом с 6 степенями свободы в каждом узле и привязать его узлы к поверхности элементами RBE2 или RBE3.
- Второй способ: граничные условия в зоне крепления болта.
- Третий способ: моделировать болты элементом RBE2.
- Четвёртый способ: моделировать болт объёмным восьмиузловым конечным элементом в виде гексаэдра с 3 степенями свободы в каждом узле. Для этого способа необходимо задать контакты между болтом и деталью. Это позволяет точнее моделировать поведение болтового соединения, но усложняет КЭМ.
Мы используем третий способ моделирования для ускорения расчёта и оптимизации.

Рисунок 14 — КЭМ моделирования сервомотора

Рисунок 15 — элементы RBE2, заменяющие болты
Настройка контактного взаимодействия
Между подшипником и алюминиевым кронштейном решено задать контактное взаимодействие типа Slide. Для этого нужно создать контактные поверхности и указать поверхности, которые будут в контакте. После этого необходимо настроить CONTACT: выбрать ведущую поверхность (MASTER) и ведомую (SLAVE). Они различаются тем, что при контакте OPTISTRUCT проверяет, пересекает ли ведомая поверхность плоскость ведущей точками; если да, OPTISTRUCT рассчитает зону контакта по этим точкам пересечения.
Ведущей следует выбирать поверхность с бо́льшим размером элемента. Также важно задать SRCHDIST и CLEARANCE (зазор). Первый параметр указывает, на каком расстоянии считать поверхности контактирующими, а второй задаёт зазор.
В этих расчётах контакт типа SLIDE — это контакт без трения между поверхностями. Есть дополнительная настройка контакта N2S или S2S. Первый тип самый быстрый по вычислительным затратам, но менее точно даёт картину контактного давления. Второй точен, но значительно замедляет расчёт.

Рисунок 16 — контактное взаимодействие подшипников и кронштейна
Формирование расчётных случаев нагружения
Для расчёта манипулятора на статическую прочность необходимо определить режимы нагружения.
Зададим коэффициент запаса K равным 1,5.
Вертикальная сила вычисляется как масса груза m, умноженная на ускорение свободного падения g и коэффициент запаса K:
$F_y = m cdot g cdot K = 16.18,text{N}$
$F_x = varepsilon cdot R cdot m cdot K = 6.73 text{N}$
$F_z = omega^2 cdot R cdot m cdot K = 72.49 text{N}$
$M_x = left(J_{x,mathrm{cg}} + m cdot d_1^2right) cdot K cdot varepsilon + F_y cdot l_1
= 651 text{N}cdottext{mm}$
$M_y = left(J_{y,mathrm{cg}} + m cdot d_2^2right) cdot K cdot varepsilon + F_x cdot l_2
= 635 text{N}cdottext{mm}$
$M_z = left(J_{z,mathrm{cg}} + m cdot d_3^2right) cdot K cdot varepsilon
= 133 text{N}cdottext{mm}$
Таблица обозначений
| Обозначение | Описание | Единица измерения |
|---|---|---|
| Fy | Вертикальная сила (вес) | N |
| Fx | Горизонтальная сила (касательная сила инерции) | N |
| Fz | Продольная сила (центробежная сила) | N |
| Mx | Суммарный момент относительно оси X | N·mm |
| My | Суммарный момент относительно оси Y | N·mm |
| Mz | Крутящий момент относительно оси Z | N·mm |
| m | Масса груза | t |
| g | Ускорение свободного падения | mm/s² |
| K | Коэффициент запаса | Безразмерная |
| ε | Угловое ускорение | rad/s² |
| ω | Угловая скорость | rad/s |
| R | Расстояние от оси вращения до ЦТ груза | mm |
| J_cg | Момент инерции груза относительно его ЦТ (с индексом x, y, z) | t·mm² |
| d | Расстояние от ЦТ груза до оси вращения (с индексом 1, 2, 3) | mm |
| l | Расстояние от точки приложения силы до оси вращения (с индексом 1, 2) | mm |
5 Анализ результатов
Результаты расчёта оказались следующими:
| Случай нагружения | Fx | Fy | Fz | Mx | My | Mz |
|---|---|---|---|---|---|---|
| Максимальное перемещение (мм) | 1.03 | 1.05 | 0.62 | 0.12 | 0.17 | 0.03 |
| Максимальное напряжение (МПа) | 93 | 92 | 65 | 10 | 14 | 4 |
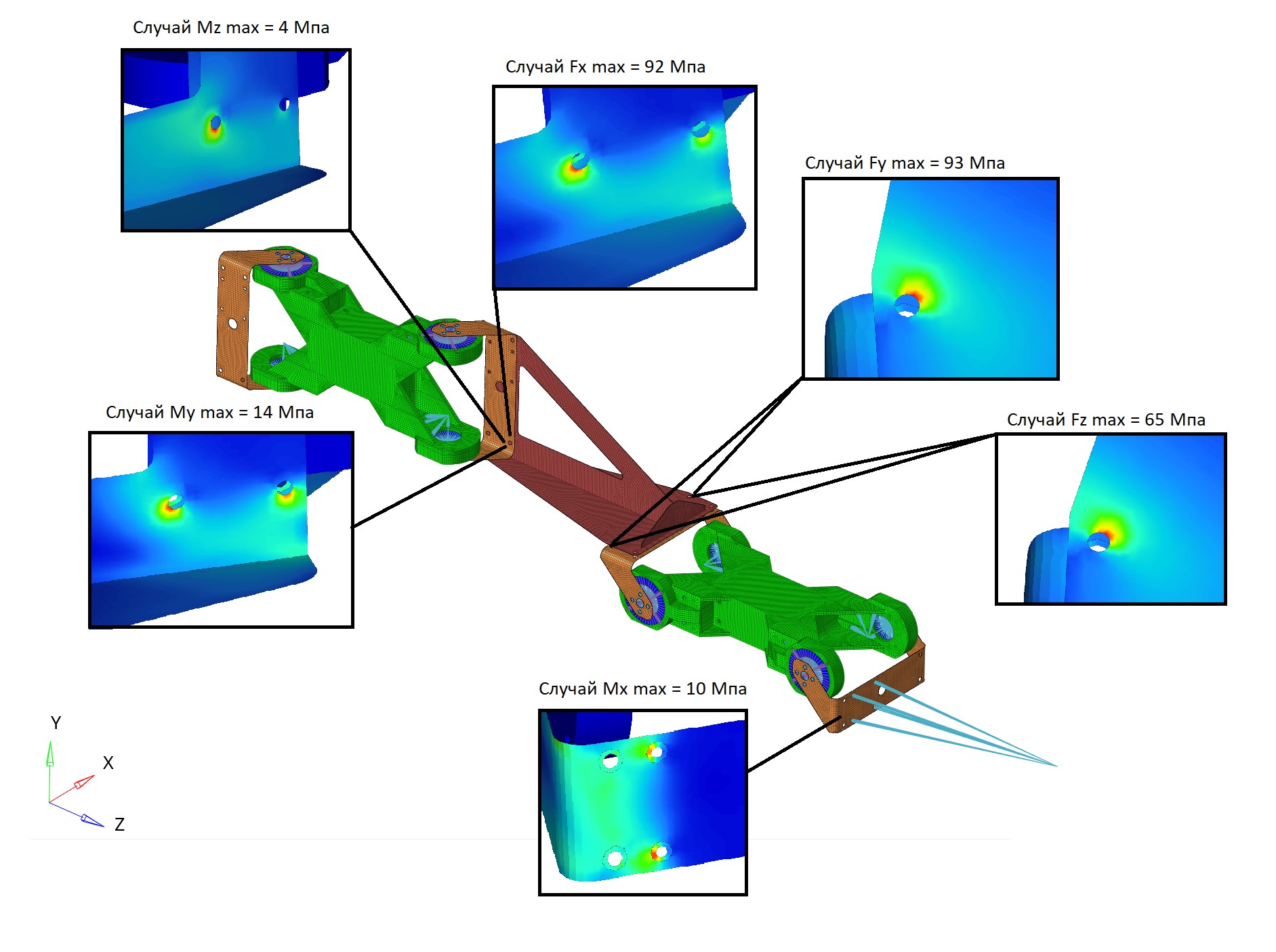
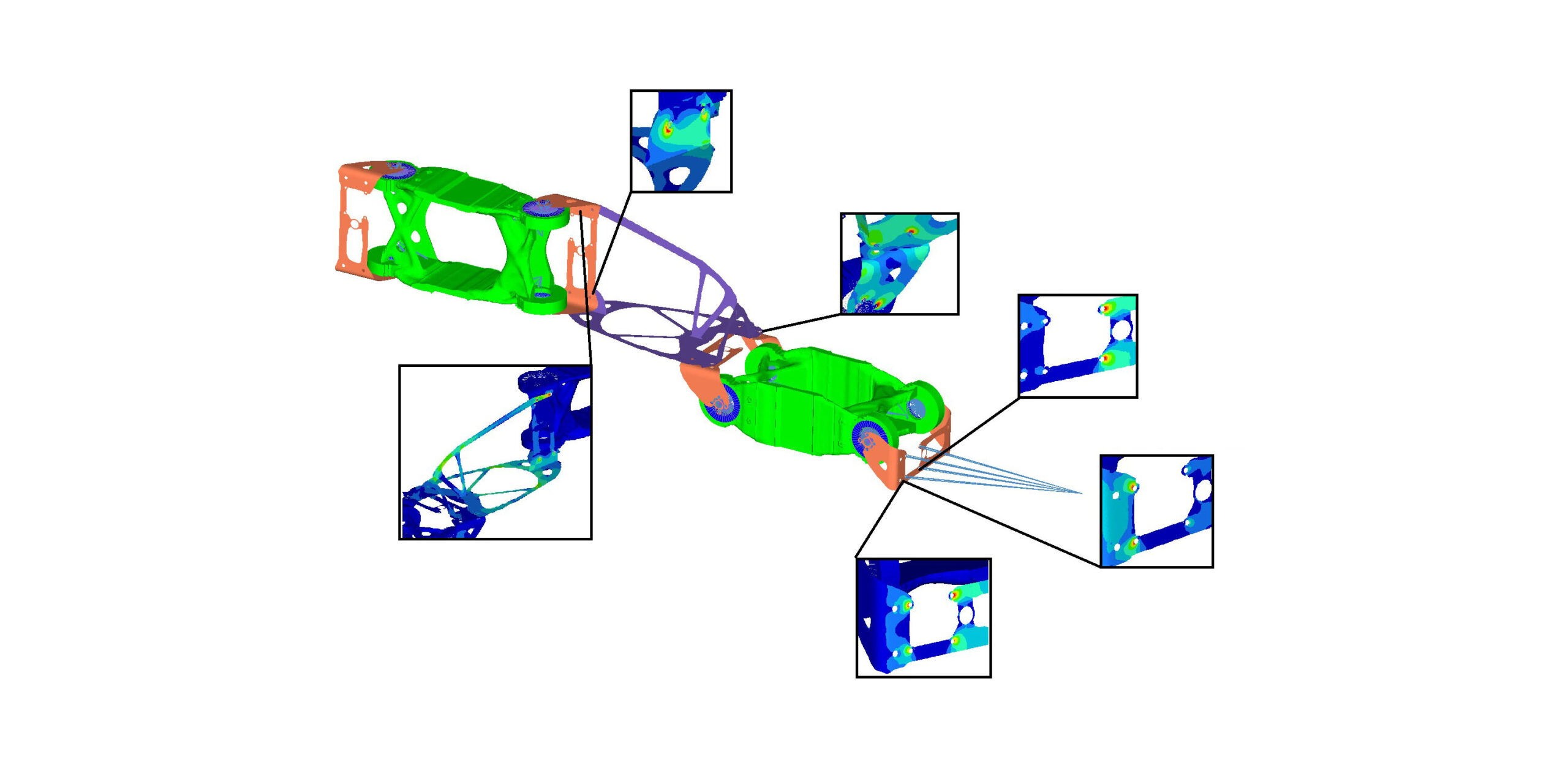
Рисунок 17 — расположение наиболее нагруженных зон, случай нагружения и возникающие в этих зонах напряжения
Максимальные напряжения возникают в узлах крепления болтов к деталям. Наибольшему напряжению подвергается «плавник».
Основы метода топологической оптимизации (по алгоритму SIMP)
Методы оптимизации делятся на две категории — концептуальное проектирование и доработки.
Оптимизация на концептуальном уровне означает проведение оптимизации (топологической или топографической) на начальном этапе проектирования для создания наилучшей формы, от которой можно двигаться дальше.
Программа оптимизации по сути автоматизирует процесс «проектирование — анализ — обратная связь модели — перепроектирование». Это позволяет вносить изменения в конструкцию по проектным критериям без изменения общей топологии. Оптимизация конструкции может базироваться на оптимизации конкретных размеров, формы или произвольно выбранной формы.
Топологическая оптимизация связана с распределением материала и тем, как элементы соединены внутри конструкции. Она рассматривает «эквивалентную плотность», или псевдоплотность каждого элемента, как проектную переменную.
Метод SIMP
Метод топологической оптимизации позволяет определить оптимальное распределение материала в заданной проектной области, соответствующее заданным граничным условиям, режимам нагружения, а также выполняющее наложенные дополнительные ограничения. Идея метода — определить оптимальное распределение материала в каждой части проектной области. Для этого область делится на N элементов. Каждый элемент либо заполнен материалом, либо пуст. Соответственно, число различных комбинаций равно 2^N, где N — число элементов.
Для решения задачи оптимизации методом SIMP плотность материала каждого элемента непрерывно изменяется в диапазоне от 0 до 1 или от $rho_{min} $ — минимальной псевдоплотности до 1:
$0 le rho_{min} le rho le 1$
С учётом этого условия при поиске минимума целевой функции плотность материала варьируется. Для решения задачи предпочтительно использовать «метод штрафа» со степенным представлением упругих свойств материала, которое можно выразить как:
$E(rho_e) = rho_e^{p},E$
где E — модуль упругости, а p — «коэффициент штрафа», всегда больше 1, или для матрицы жёсткости элемента как:
$K(rho_e) = rho_e^{p},K$
где K — матрица жёсткости элемента, а p — «коэффициент штрафа», всегда больше 1.
Податливость и жёсткость
Общую жёсткость конструкции также можно использовать как целевую функцию. Это можно рассматривать как минимизацию податливости при заданном снижении массы. Податливость — мера общей подвижности или «мягкости» конструкции; это величина, обратная жёсткости. Полная податливость равна сумме энергий деформации, или упругой энергии в элементах. Минимизация полной податливости эквивалентна максимизации общей жёсткости.
Алгоритм оптимизации в итеративном процессе стремится определить плотности элементов, минимизирующие общую податливость конструкции:
$C(rho) = sum_{i=1}^{N} rho_i^{p}, mathbf{u}_i^{mathsf{T}}, mathbf{k}_i, mathbf{u}_i$
где u — вектор перемещений i-го элемента, k — матрица жёсткости i-го элемента, ρ — псевдоплотность соответствующего элемента. Уравнение имеет вид:
$K,U = F$
где K — матрица жёсткости, U — матрица перемещений, F — вектор сил.
Технологичность изготовления
Конструкцию, форма которой определена на основе трёхмерной оптимизации, во многих случаях нельзя изготовить стандартными технологиями. Поэтому в таких случаях необходима оценка технологичности геометрии оптимизированных конструкций. Также для решения этой задачи при оптимизации можно задать определённые ограничения, способствующие получению геометрии, готовой к изготовлению различными традиционными производственными технологиями.
Поэтому для оптимизации по приведённому алгоритму для каждой оптимизируемой детали необходимо создать Des space — расширенную геометрию, в которой будет проводиться поиск оптимальной конструкции.

Рисунок 18 — Des space стального П-образного кронштейна |

Рисунок 19 — Des space алюминиевого кронштейна |

Рисунок 20 — Des space стального кронштейна «плавник»
Параметры и ограничения оптимизации
Для проведения оптимизации необходимо создать переменные или параметры (отклики) модели, по которым деталь будет оптимизироваться. Создаём 2 системных отклика, или параметра:
Первый параметр — wcompliance (взвешенная податливость). Соотношение имеет вид:
$C_w = sum_{i} W_i , C_i = frac{1}{2}sum_{i} W_i , mathbf{u}_i^{mathsf{T}} , mathbf{f}_i$
Второй параметр — масса в заданной проектной области. Этот параметр даёт нам массу проектной области. Он может быть определён для всей конструкции, а также для отдельных свойств (компонентов) и материалов или для групп свойств (компонентов) и материалов.
Помимо целевой функции (а именно снижения податливости) необходимо задать ограничения. dconstrain — ограничение, которое решатель не должен нарушать. В расчётах масса не должна отличаться от массы предыдущей детали более чем на 15%. Это значит, что ограничение по массе для каждой проектной зоны будет своим. В этой программе также можно задать ограничение на объём, относительный объём или относительную массу. Разница между относительной массой и относительным объёмом в том, что относительная масса учитывает массу всей модели, а доля объёма — только проектную область.
Чтобы найти наиболее оптимальную форму, необходимо создать целевую функцию. Эта функция — экстремум, который нужно найти. Здесь задаются различные системные отклики (перемещение, угол закрутки, напряжения и т. д.). В данном случае мы задаём wcompliance как функцию, минимум которой будет искать программа.
Затем задаём дополнительные ограничения оптимизации. Помимо массы, дополнительным ограничением будет максимально допустимое напряжение 150 МПа. Этот параметр должен быть ниже предела текучести материала, поскольку при достижении предела текучести деталь пластически деформируется, что может привести к очень серьёзным последствиям. Следует понимать, что значение ограничения по напряжению будет сравниваться с напряжением в элементе по теории фон Мизеса.
Технологические ограничения в OptiStruct
Проблема топологической оптимизации в том, что разработанные концепции конструкции очень часто нетехнологичны. Другая проблема — решение задачи топологической оптимизации может зависеть от сетки, если не принять соответствующие меры.
OptiStruct предлагает несколько методов для учёта технологичности при топологической оптимизации:
mindim — управляет наименьшим размером, который должен сохраняться при поиске топологии, а также минимизирует «шахматный» эффект, создаваемый сеткой, и обеспечивает более дискретную конструкцию. Поскольку оптимизация требует дискретного значения 1 или 0 для элементов, это ограничение обычно повышает чёткость конструкции, устраняя промежуточные элементы, которые иначе могли бы образоваться.
draw direction — при литье или фрезеровании невозможно создать полости, не открытые и не ориентированные в направлении движения формы. Конструкции, полученные топологической оптимизацией, часто содержат полости, непригодные для литья или фрезерования. Преобразовать такое решение в технологичную конструкцию может быть крайне сложно, если не невозможно.
OptiStruct позволяет задавать ограничения направления извлечения, чтобы определённая топология допускала движение формы в заданном направлении.
Доступны два варианта извлечения:
- The “SINGLE” предполагает, что будет использоваться одна форма, движущаяся в заданном направлении извлечения. Нижняя поверхность отливаемой детали — заранее заданная рабочая часть формы.
- The “SPLIT” подразумевает, что для отливки детали, описанной в этой карте DTPL, будут использоваться две формы, расходящиеся в заданном направлении извлечения.
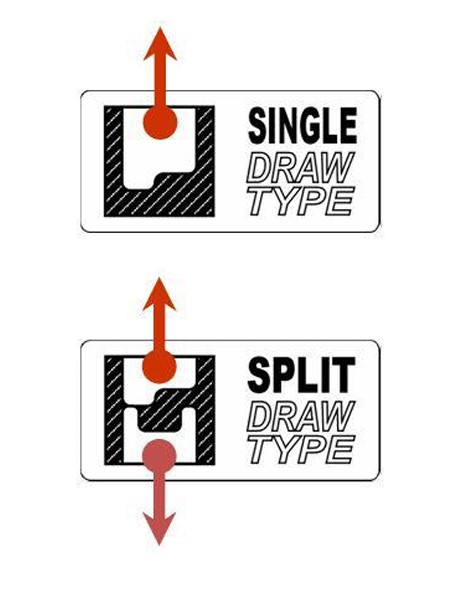
Рисунок 21 — различие между draw single и draw split
При использовании варианта извлечения «SINGLE» могут возникать ограничения при изготовлении штамповкой или из листового металла. Этот параметр ускоряет эволюцию конструкции, интерпретируемой как 3D-оболочка, 3D-проектная область. Это позволяет проектировать 2D-оболочки или штампованные детали из 3D-проектной области, давая бо́льшую гибкость проектирования.
Деталь может содержать не только проектную область, но и непроектную. Эти непроектные области должны быть заданы как препятствия для процесса. Это сохраняет возможность отлить итоговую конструкцию. Также отметим, что для ограничений направления извлечения есть минимальный размер элемента по умолчанию. Это значение определяется как утроенный средний размер ячейки для соответствующих компонентов. Таким образом, плотность сетки модели и требуемую долю объёма следует выбирать так, чтобы материала хватало для заполнения элементов минимального размера по умолчанию. Пользователь может задать желаемый минимальный размер элемента для каждой части конструкции.
Pattern repetition — приём, позволяющий соединять различные компоненты конструкции так, чтобы создавать похожие топологические паттерны.
Pattern grouping — связывание переменных так, чтобы формировались нужные формы конструкции. Линейные, плоскостные, круговые, радиальные и т. д. Формованные элементы конструкции управляются отдельными переменными, что обеспечивает соответствие конструкции нужному паттерну. Варианты группировки по одной, двум, трём плоскостям и циклической симметрии также используют похожий подход для обеспечения симметрии в решении.
Результаты оптимизации стального кронштейна «плавник»
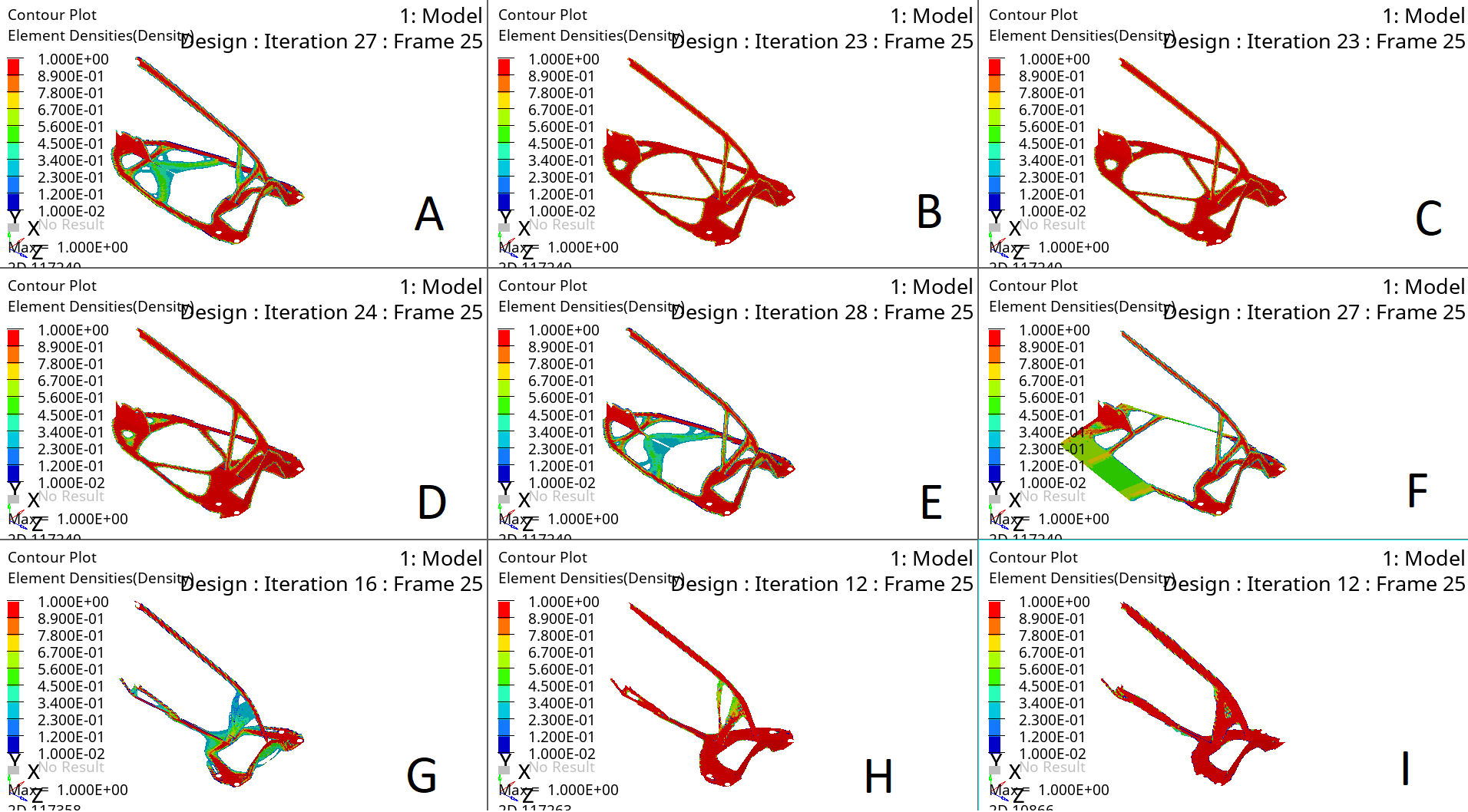
Рисунок 22 — полученные варианты оптимизации «плавника»
| A | B | C | D | E | F | G | H | I | |
|---|---|---|---|---|---|---|---|---|---|
| Материал | Сталь | Сталь | Сталь | Сталь | Сталь | Сталь | Сталь | Сталь | Сталь |
| Толщина | 8 | 6 | 5 | 4 | 3 | 6 | 15 | 8 | 6 |
| Число нагрузок | 6 | 6 | 6 | 6 | 6 | 2 | 1 | 1 | 1 |
Как видно из полученных паттернов оптимизации, плоскость YZ кронштейна отвечает за изгибную жёсткость манипулятора относительно оси X. Эту стенку рекомендуется увеличить до толщины 6 мм; эта часть вносит наибольший вклад в жёсткость по оси Y. Плоскость XZ кронштейна отвечает за изгиб относительно оси Y, и её можно сделать толщиной 3 мм. Выбор конкретного контура и его обводки зависит только от инженера. Красные зоны — наиболее нагруженные, а жёлто-зелёная граница — это опциональные зоны, включать их или нет, решает инженер.
Результаты оптимизации стального П-образного кронштейна
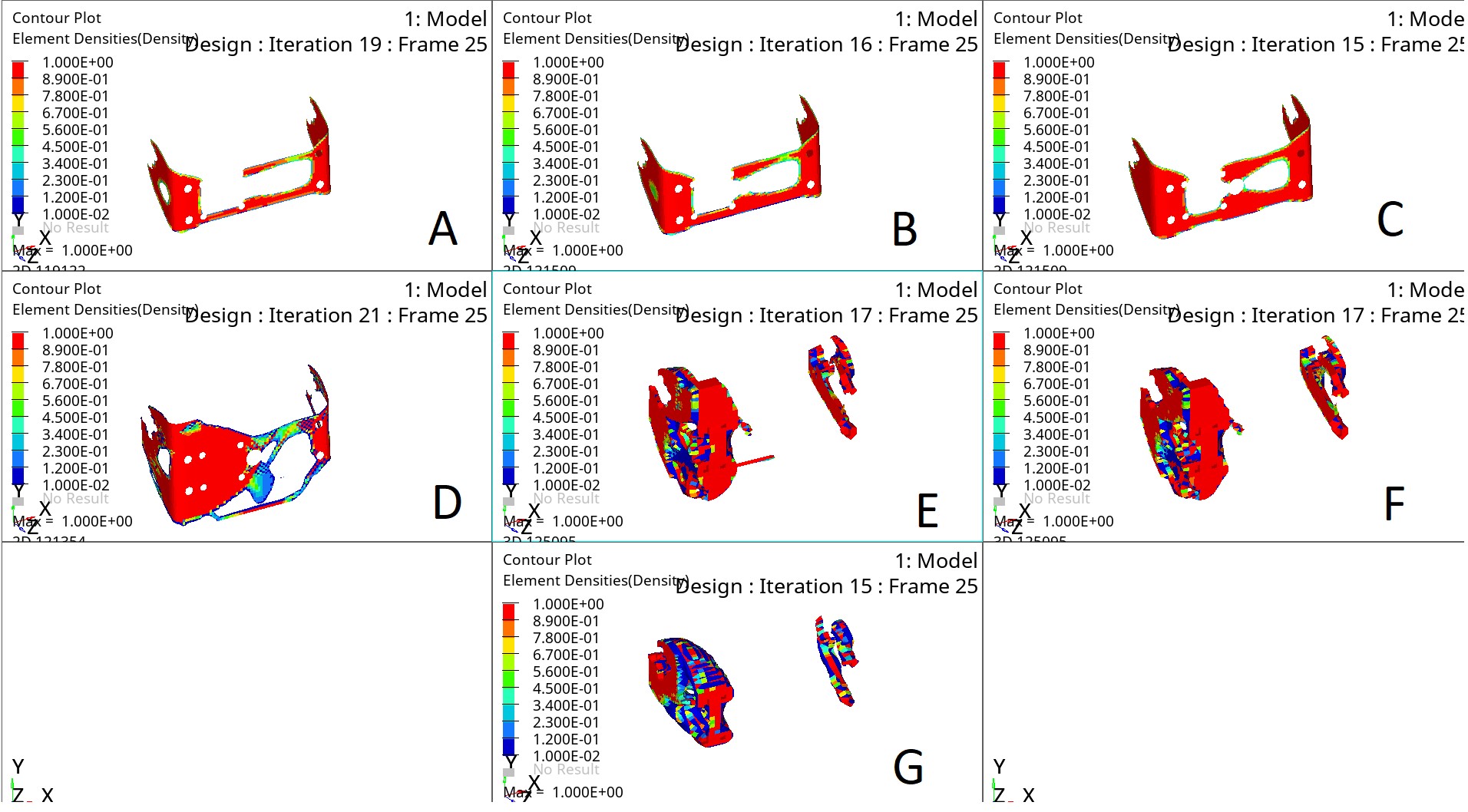
Рисунок 23 — полученные варианты оптимизации стального П-образного кронштейна
| A | B | C | D | E | F | G | |
|---|---|---|---|---|---|---|---|
| Материал | Сталь | Сталь | Сталь | Сталь | Сталь | Сталь | Сталь |
| Толщина | 8 | 6 | 5 | 3 | |||
| Число нагрузок | 6 | 6 | 6 | 1 | 1 | 1 | 1 |
Как видно из полученных паттернов оптимизации стального П-образного кронштейна, центральное отверстие не нагружено. Также рекомендуется расширить основание кронштейна и увеличить толщину до 6 мм.
Результаты оптимизации алюминиевого кронштейна
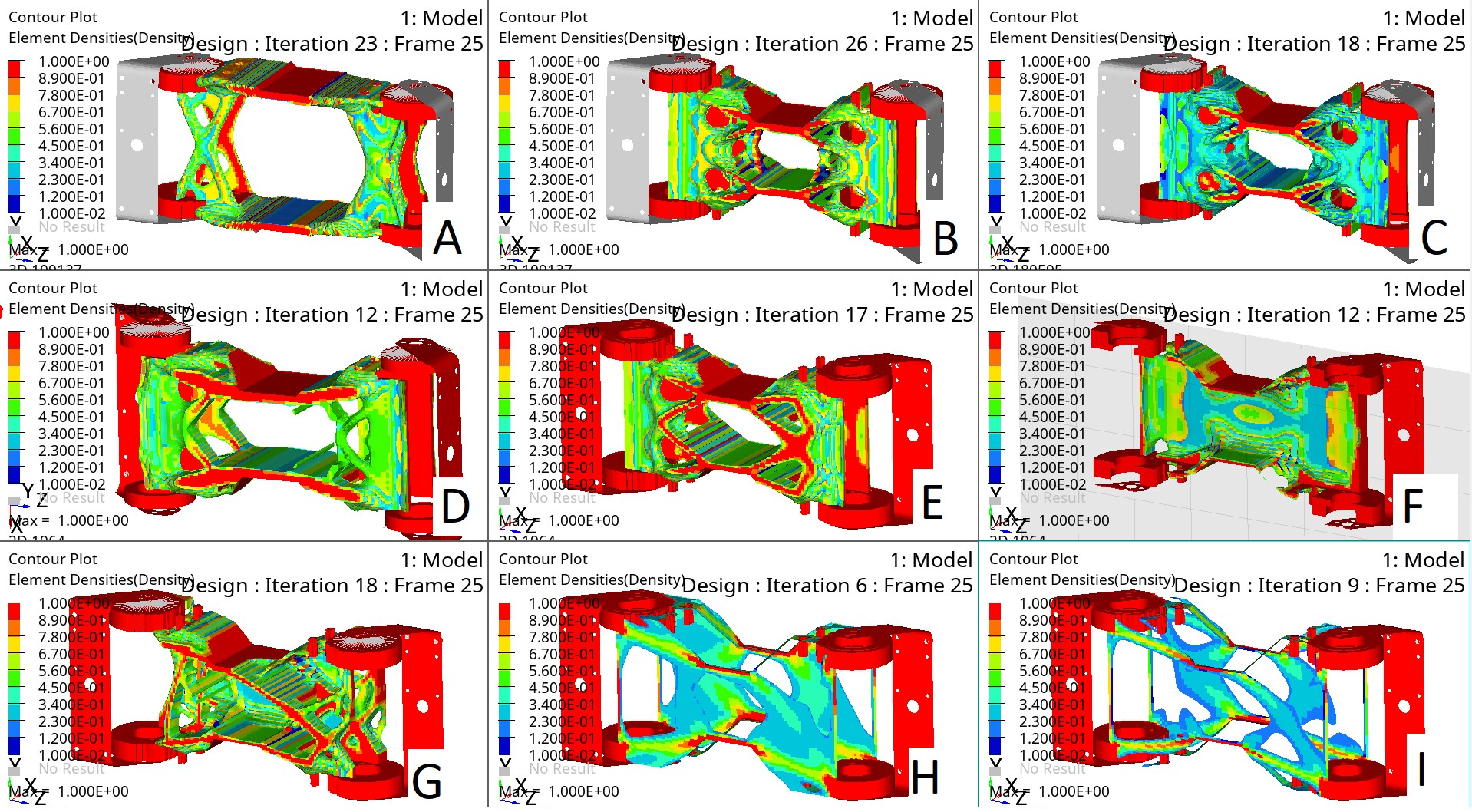
Рисунок 24 — полученные варианты оптимизации алюминиевого кронштейна
| A | B | C | D | E | F | G | H | I | |
|---|---|---|---|---|---|---|---|---|---|
| Материал | Алюминий | Алюминий | Алюминий | Алюминий | Алюминий | Алюминий | Сталь | Сталь | Сталь |
| Симметрия | yes | yes | yes | yes | yes | yes | no | yes | yes |
| Число нагрузок | 6 | 6 | 6 | 6 | 2 | 2 | 1 | 1 | 1 |
Как видно из полученных паттернов оптимизации, заменить алюминиевый кронштейн стальным невозможно из-за слишком малой массы. Большинство паттернов показывают, что лучше распределять массу по стенкам. Этому есть объяснение. Поскольку манипулятор работает на изгиб, оптимизатор стремится к наиболее оптимальной форме сечения на изгиб, то есть к двутавру. Поскольку центральная часть недогружена, а крайние части вносят наибольший вклад в жёсткость.

Рисунок 25 — наиболее жёсткое сечение на изгиб
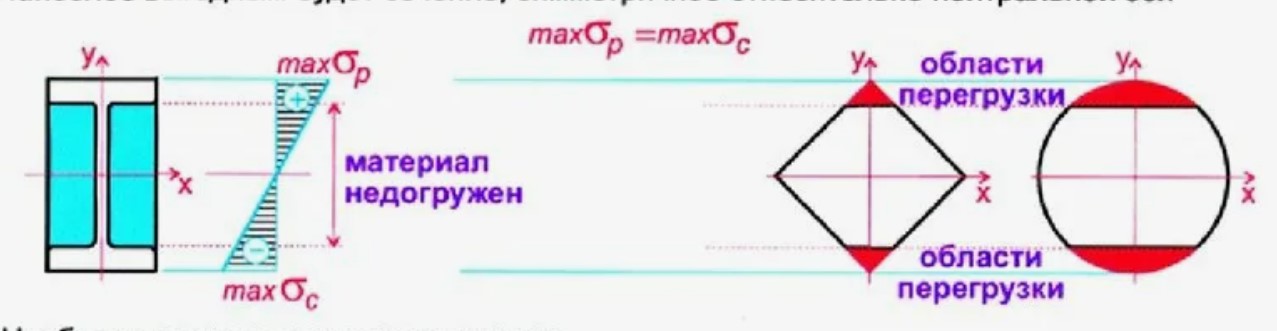
Рисунок 25 — наиболее жёсткое сечение на изгиб
Поверочный расчёт
После выбора формы необходимо выполнить поверочный расчёт:

Рисунок 26 — КЭМ оптимизированной конструкции
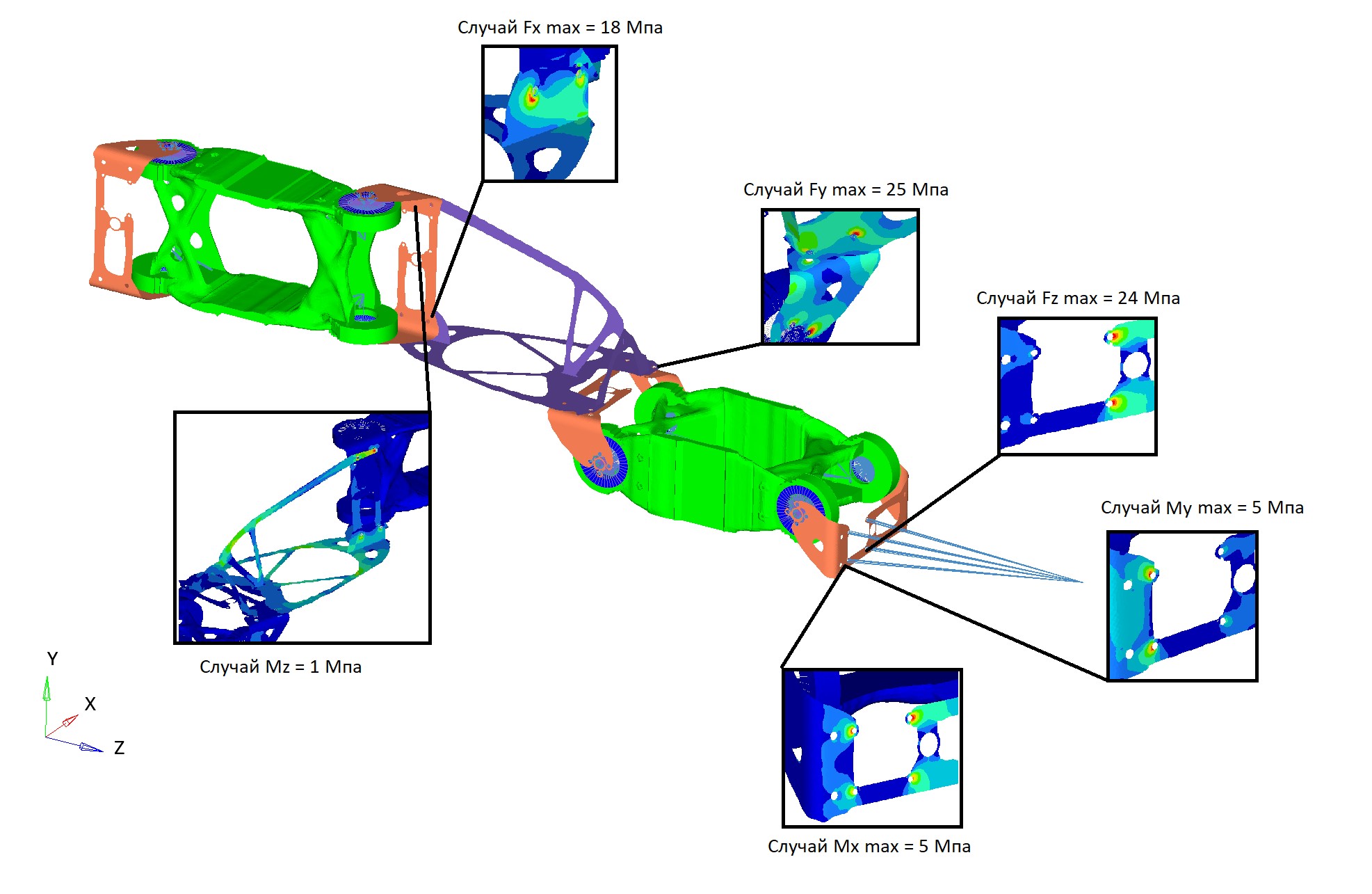
Рисунок 27 — полученные результаты расчёта оптимизированной конструкции
Результаты оптимизированной конструкции
| Случай нагружения | Fx | Fy | Fz | Mx | My | Mz |
|---|---|---|---|---|---|---|
| Максимальное перемещение (мм) | 0.41 | 0.31 | 0.21 | 0.04 | 0.05 | 0.01 |
| Максимальное напряжение (МПа) | 18 | 25 | 24 | 5 | 5 | 1 |
Максимальные напряжения возникают в узлах крепления болтов к деталям.

Рисунок 28 — финальная версия манипулятора с повышенной жёсткостью конструкции
Сравнение: исходная и оптимизированная конструкция
| Параметр | Исходная конструкция | Оптимизированная конструкция |
|---|---|---|
| Масса | 1.937 kg | 2.376 kg |
| Макс. напряжение | 93 MPa | 25 MPa |
| Прогиб от Fy | 1.05 mm | 0.41 mm |
| Прогиб от Fx | 1.03 mm | 0.31 mm |
| Прогиб от Fz | 0.62 mm | 0.21 mm |
| Прогиб от Mx | 0.12 mm | 0.04 mm |
| Прогиб от My | 0.17 mm | 0.05 mm |
| Прогиб от Mz | 0.03 mm | 0.01 mm |
Выводы
Технические требования не выполнены; to ensure требуемой жёсткости допустимую массу следует увеличить более чем на 15% от текущего значения. Достигнуто значительное повышение жёсткости: в результате топологической оптимизации ключевых элементов конструкции снижена податливость. Перемещения манипулятора уменьшились на 57–76% в зависимости от случая нагружения.
Целевой показатель не достигнут: несмотря на значительное улучшение, итоговый прогиб наконечника манипулятора (максимальное перемещение 0,41 мм) превысил значение, требуемое техническими требованиями (не более 0,3 мм). Таким образом, основное требование технического задания полностью выполнить не удалось.
Рекомендации по достижению требуемых параметров
Для достижения требуемых параметров рассмотрите следующие варианты:
- Увеличить допустимую массу сверх текущего ограничения в 15%
- Увеличить число неодинаковых элементов конструкции, делая каждый последующий элемент от основания крепления манипулятора легче
- Заменить алюминиевые кронштейны стальными — поскольку у алюминия модуль упругости 70 ГПа, а у стали 200 ГПа, это повысит жёсткость детали в 2,5 раза при той же нагрузке
- Рассмотреть альтернативные материалы с более высоким модулем упругости, чем у алюминия, и меньшей плотностью, чем у стали
- Сместить центр масс как можно ближе к основанию, чтобы уменьшить моменты инерции
Эффективность метода оптимизации
Применение метода топологической оптимизации доказало свою эффективность для поиска оптимального распределения материала в заданных проектных областях (Des space). Метод позволил выявить нагруженные и ненагруженные зоны деталей и сформулировать конкретные рекомендации по изменению их геометрии. Однако технологичность решений не самая лучшая.
Полученные конкретные конструктивные решения
Для каждого из трёх оптимизированных кронштейнов получены варианты, на основе которых разработаны новые геометрии. Важно понимать, что при обводке элементов конструкции масса будет больше расчётной из-за нечётких границ полученных форм, тогда как при обводке задаётся чёткая граница.
For the steel U-shaped bracket: Рекомендуется расширить основание и увеличить толщину стенки, отвечающей за изгибную жёсткость, до 6 мм.
For the aluminum bracket: Оптимизатор показал целесообразность распределения массы по стенкам, стремясь к форме двутавра.
For the steel “fin” bracket: Рекомендуется увеличить толщину вертикальной стенки до 6 мм. Основание можно оставить 3 мм или увеличить до 6 мм.
Проверка прочности
Поверочный расчёт оптимизированной конструкции показал, что максимальные напряжения в деталях значительно снизились (с 93 МПа до 25 МПа), что существенно ниже предела текучести материалов и обеспечивает повышенный запас прочности. При этом ограничение по массе было соблюдено (увеличение не более 15%).
Итоговое заключение
Получена более жёсткая и прочная конструкция манипулятора, которая, однако, не полностью удовлетворяет исходному требованию по прогибу ≤ 0,3 мм. Полученные результаты и методика — надёжная основа для дальнейших итераций проектирования, направленных на полное выполнение технических требований, возможно за счёт использования более жёстких материалов или дополнительных изменений кинематической схемы.
жёсткость рулит, согласен на все 100
отличная тема которую вечно недооценивают, добавлю что увеличение сечения звена работает до определённого предела, потом растёт только масса а жёсткость почти нет, гораздо эффективнее работать над геометрией сечения и треугольными рёбрами жёсткости, у меня замена сплошного звена на коробчатый профиль с рёбрами дала прирост жёсткости при том же весе, а ещё сильно помогло заменить пластиковые проставки в узлах крепления на металлические потому что именно они сминались под нагрузкой и давали основной увод кончика, так что советую сначала найти где реально податливость измерением а не на глаз потом усиливать адресно
по опыту скажу что прогиб руки чаще приходит не от самих звеньев а от люфта в редукторах и слабого крепления моторов, можно поставить хоть стальные звенья но если привод болтается в посадке точность всё равно уплывёт, так что начинать надо со стыков
А что больше всего даёт по жёсткости — материал звеньев или проработка стыков суставов?
На практике стыки суставов дают больше: даже жёсткое звено бесполезно, если оно болтается в соединении. Мы в первую очередь боремся с податливостью в подшипниковых узлах и креплениях приводов.
Очень помогли, спасибо.