Aumentando a rigidez estrutural do manipulador de 6 GDL
 1899
1899
Resumo
Este artigo apresenta um conjunto de trabalhos de projeto e engenharia para garantir uma deflexão do manipulador de no máximo 0,3 mm. O objeto de pesquisa é um manipulador robótico. O objetivo da P&D é otimizar o projeto dos seguintes componentes do manipulador:
- Suporte de alumínio
- Suporte de aço em forma de U
- Suporte de aço “aleta”
Resultados do trabalho realizado:
Com base nos resultados da otimização dos suportes, foi desenvolvido um modelo eletrônico refinado do manipulador, e o manipulador foi calculado quanto à resistência estática sob sobrecarga máxima dos motores. Foi elaborada uma lista de propostas de modificações de projeto. Foi desenvolvido um modelo eletrônico do projeto otimizado, incluindo cálculos de verificação da estrutura.
Não foi possível alcançar plenamente os resultados de rigidez exigidos. No entanto, a rigidez estrutural aumentou significativamente:
- O deslocamento devido à carga vertical diminuiu 57%
- O deslocamento devido à carga horizontal ao longo do eixo X diminuiu 65%
- O deslocamento devido à carga horizontal ao longo do eixo Z diminuiu 66%
- O deslocamento devido ao momento em torno do eixo X diminuiu 66%
- O deslocamento devido ao momento em torno do eixo Y diminuiu 76%
- O deslocamento devido ao momento em torno do eixo Z diminuiu 67%
Abreviaturas e designações
| Abreviatura | Definição |
|---|---|
| TOR | Requisitos técnicos |
| EM | Modelo eletrônico |
| FE | Elemento finito |
| FEM | Modelo de elementos finitos |
| SSS | Estado de tensão-deformação |
| CG | Centro de gravidade |
| CS | Sistema de coordenadas |
Introdução
Como dados iniciais para a análise do projeto do manipulador, o Cliente forneceu um contorno feito em superfícies, bem como um ME do manipulador na forma recolhida. No âmbito do trabalho, foi realizada uma análise do manipulador e foram aumentadas as propriedades de rigidez da estrutura, capaz de suportar as cargas estáticas e sobrecargas dos motores que atuam sobre ela, mantendo a menor massa possível.
Como dados iniciais para a otimização do projeto do manipulador, o Cliente forneceu um ME do manipulador. No âmbito do trabalho, o projeto foi refinado e calculado quanto à resistência estática em condições de sobrecarga, e foram desenvolvidas recomendações de aprimoramento.
Formação do conceito do manipulador
No âmbito do trabalho, era necessário otimizar o projeto do manipulador. De acordo com os requisitos técnicos, os principais requisitos para o projeto do manipulador são os seguintes:
- A estrutura deve suportar uma carga estática de um peso de 1,1 kg
- A deflexão da ponta do manipulador não deve exceder 0,3 mm
- Aumento de massa permitido: no máximo 15%
- É necessário manter os ângulos de flexão atuais iguais a 270° por junta
- Não aumentar o número de peças exclusivas (fabricadas sob encomenda)
Descrição dos principais elementos do manipulador
Espera-se que o requisito de rigidez seja atendido alterando-se a forma dos suportes na parte principal do manipulador.
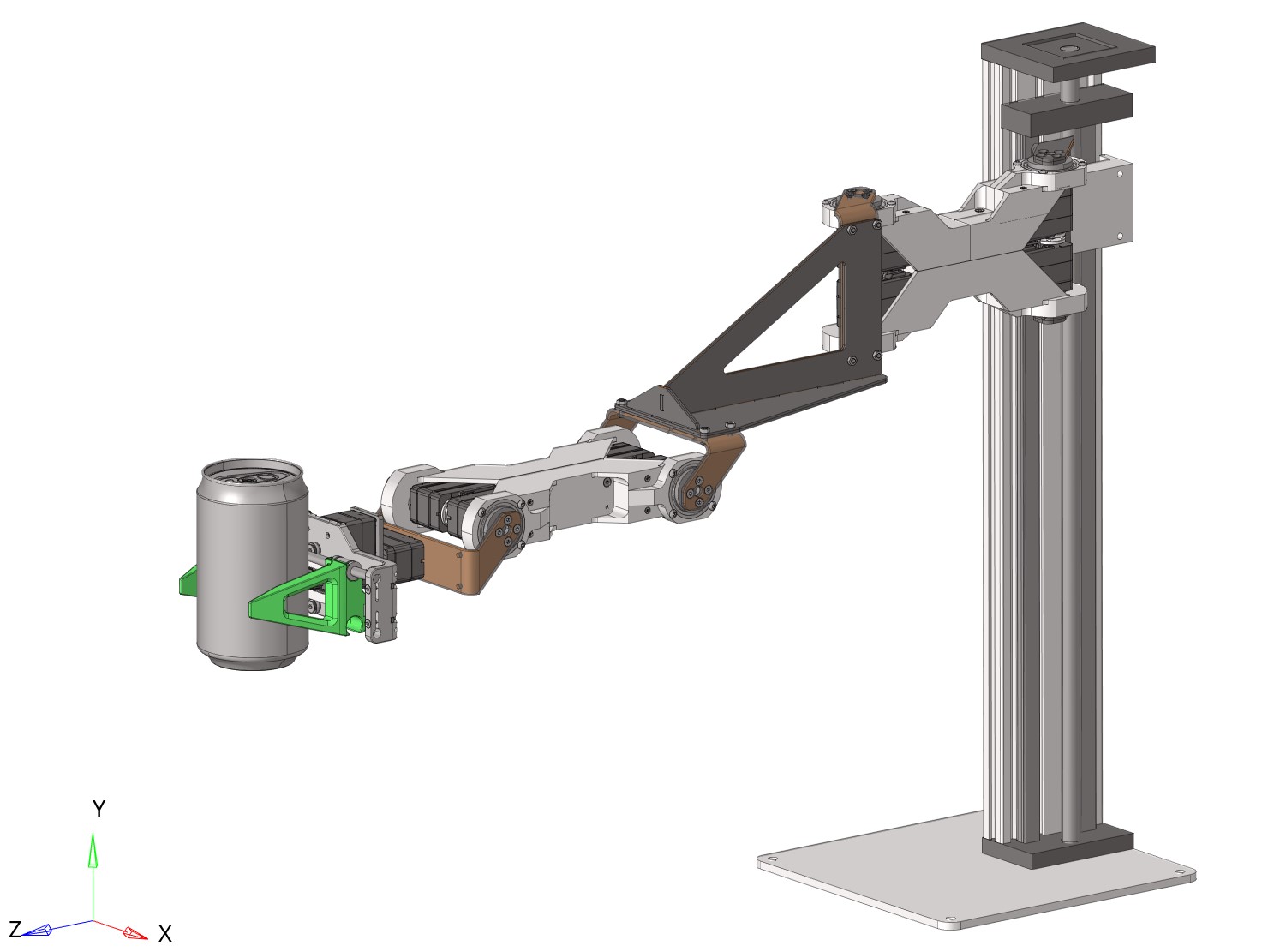
Vista geral do manipulador 1 |
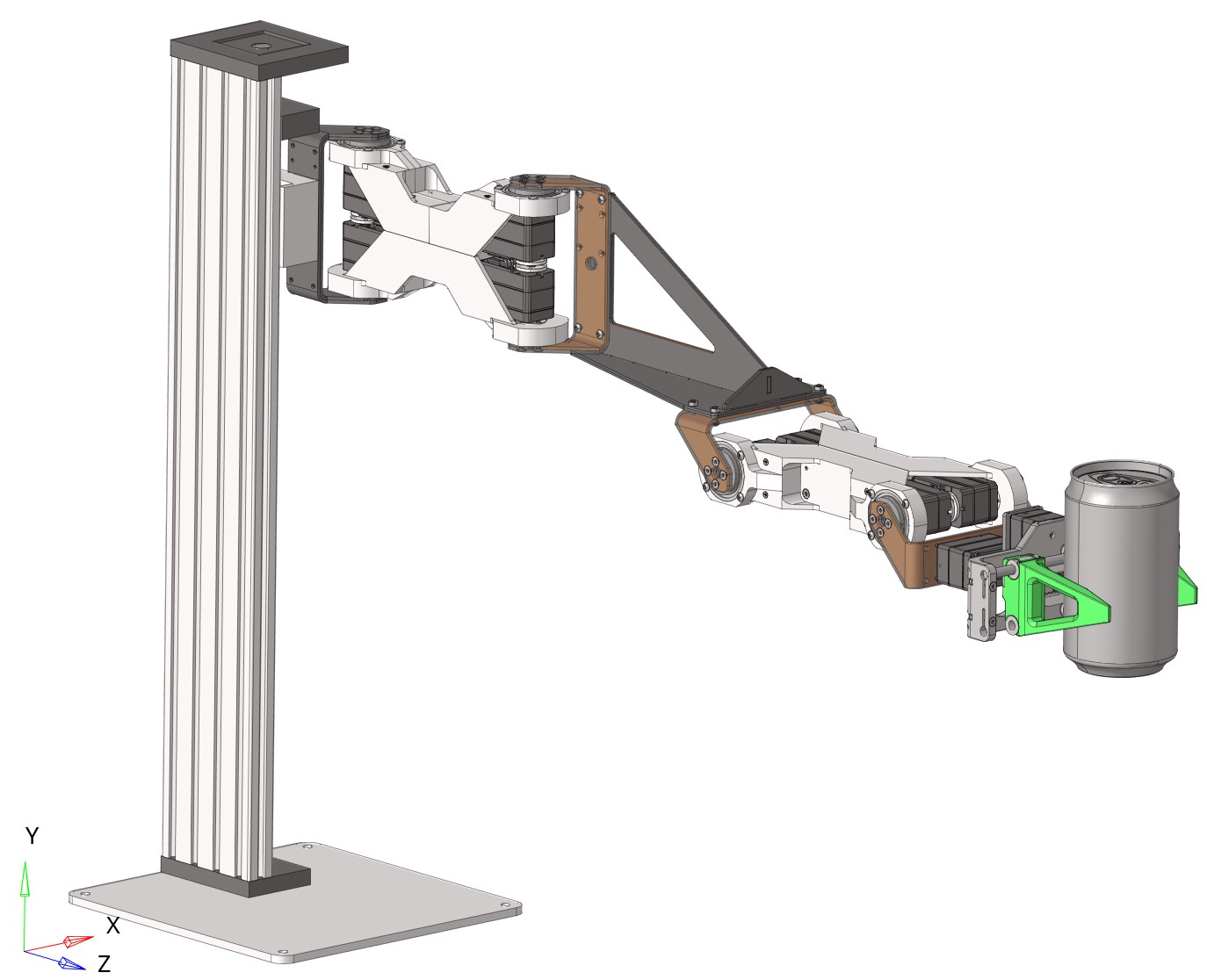
Vista geral do manipulador 2 |
Como se vê na Figura 1, o projeto do manipulador consiste em uma base (Figura 2), 4 suportes de aço em forma de U (Figura 3), 4 suportes de alumínio (Figura 4), 1 suporte de aço “aleta” (Figura 5) e 10 servoacionamentos.
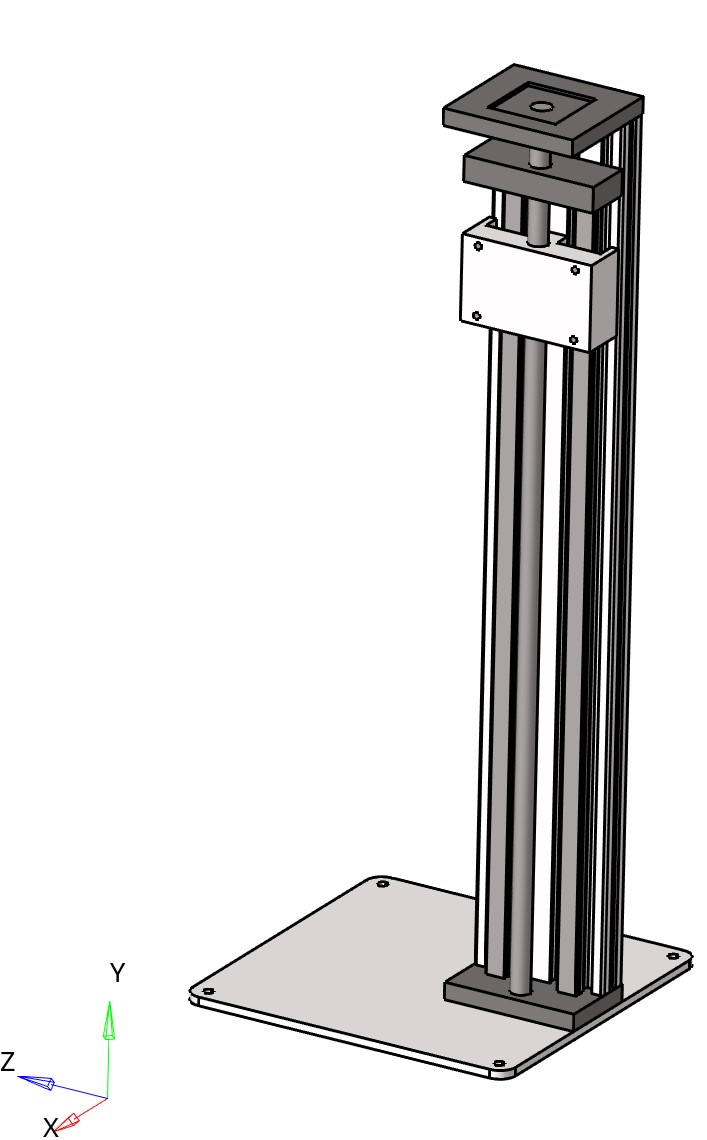
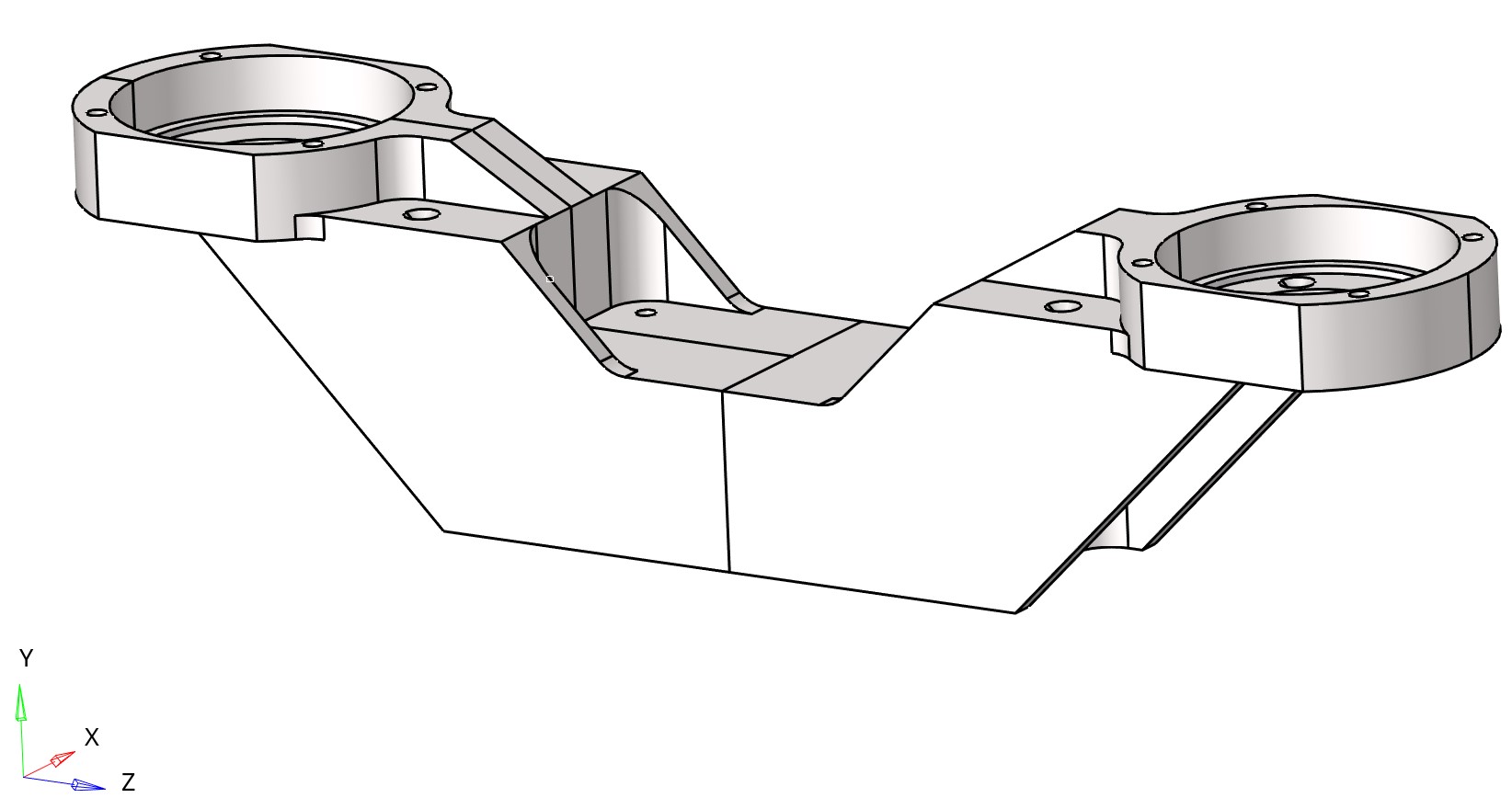
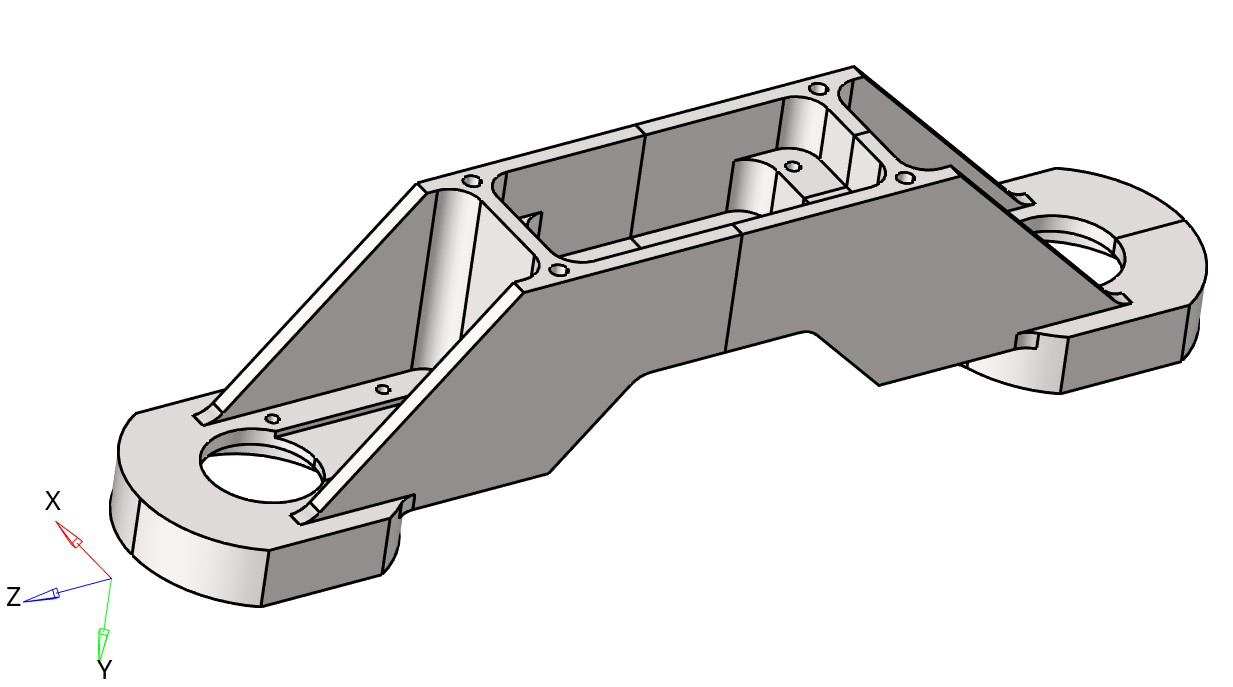
Vista geral da base
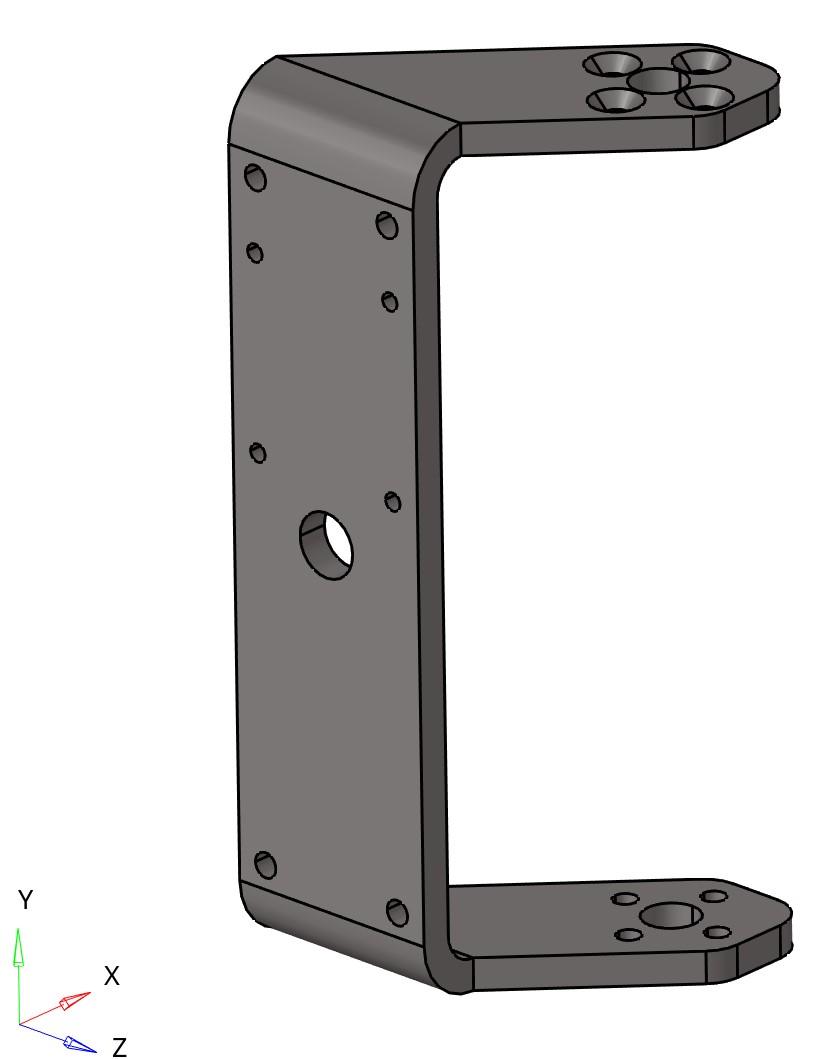
Suporte de aço em forma de U 1 |
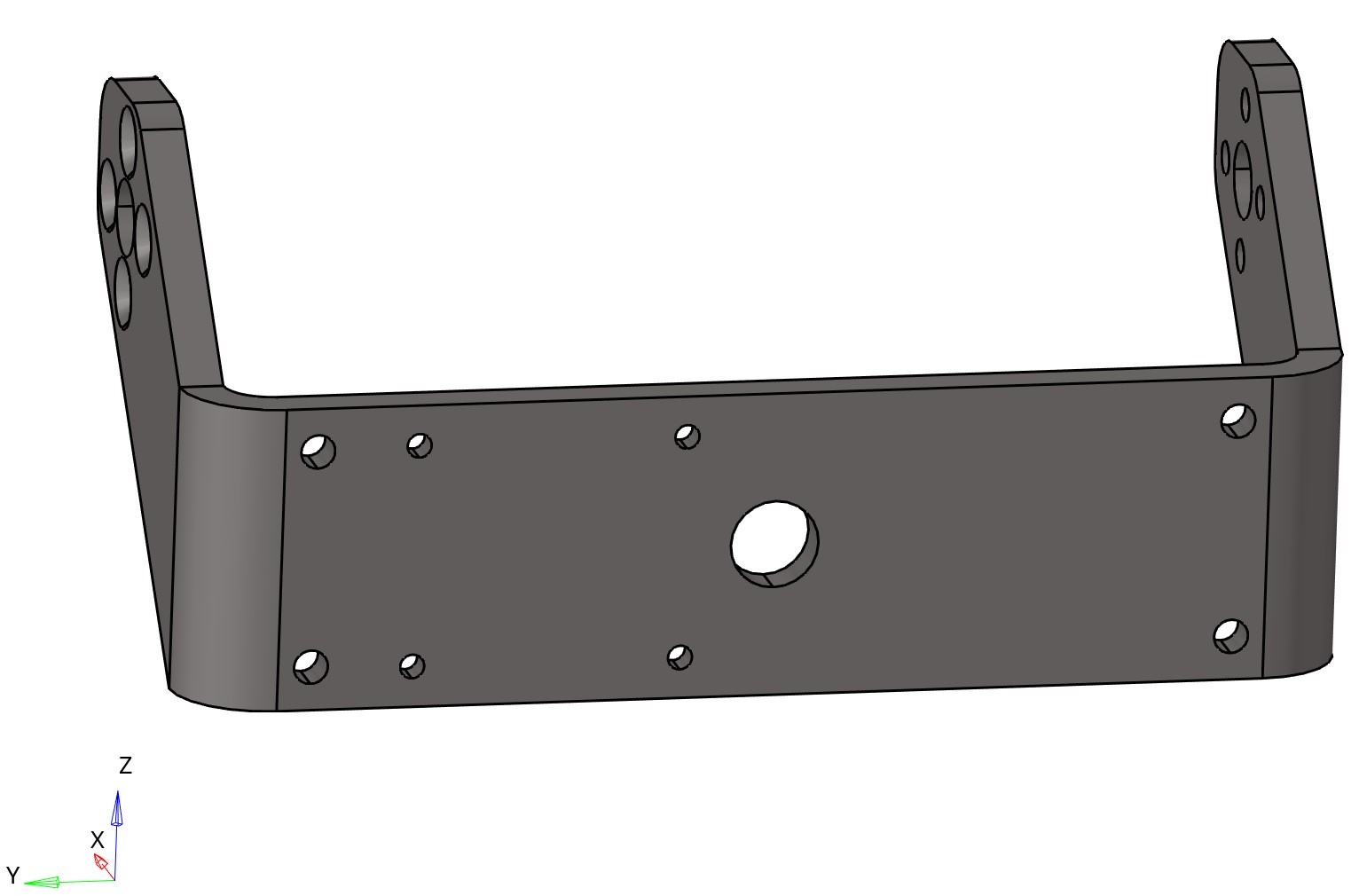
Suporte de aço em forma de U 2 |
Suporte de alumínio 1 |
Suporte de alumínio 2 |
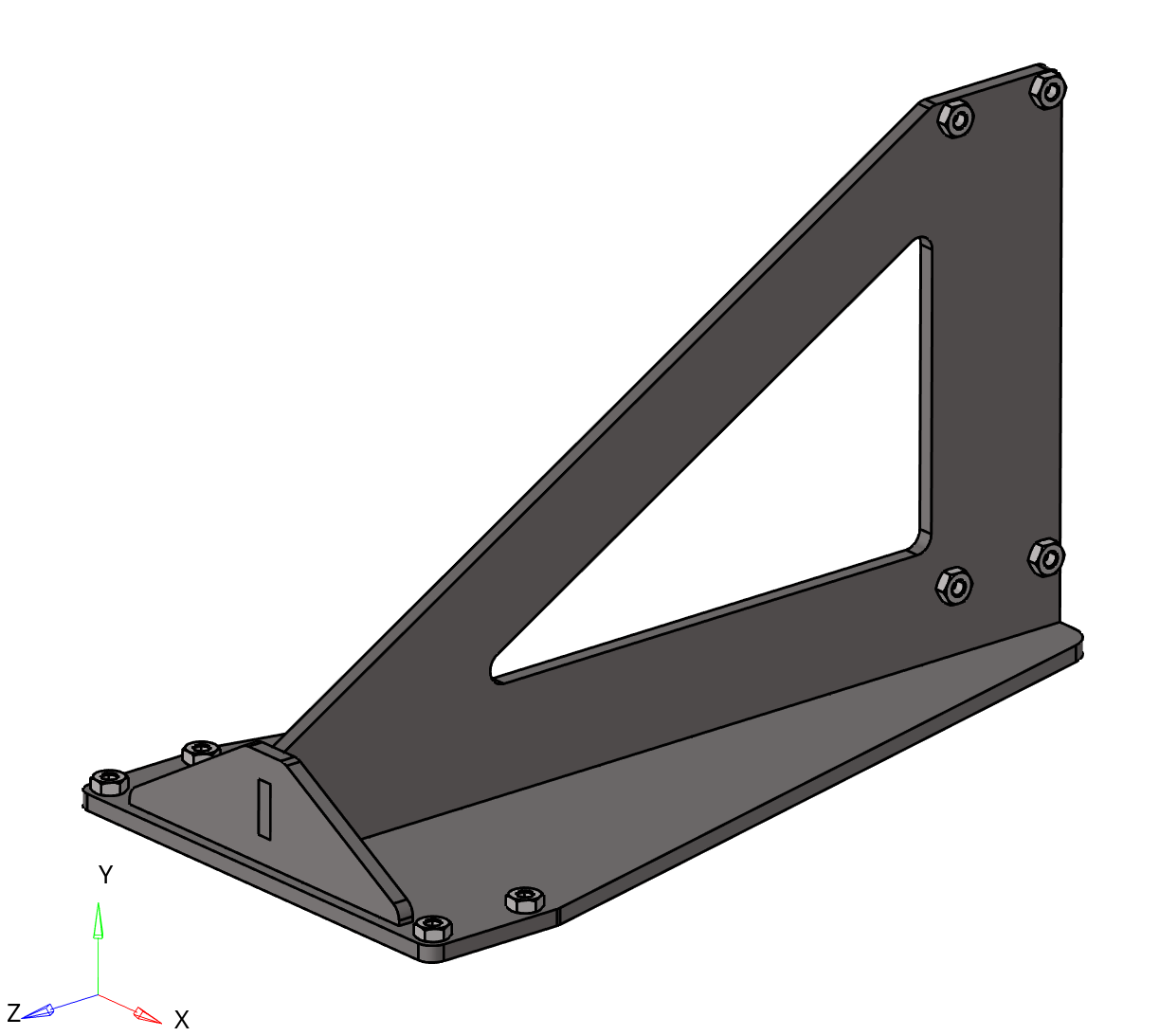
Suporte de aço aleta
Mapa de distribuição de materiais no modelo:
Elementos de aço |
Elementos de alumínio |
Construção do modelo de elementos finitos
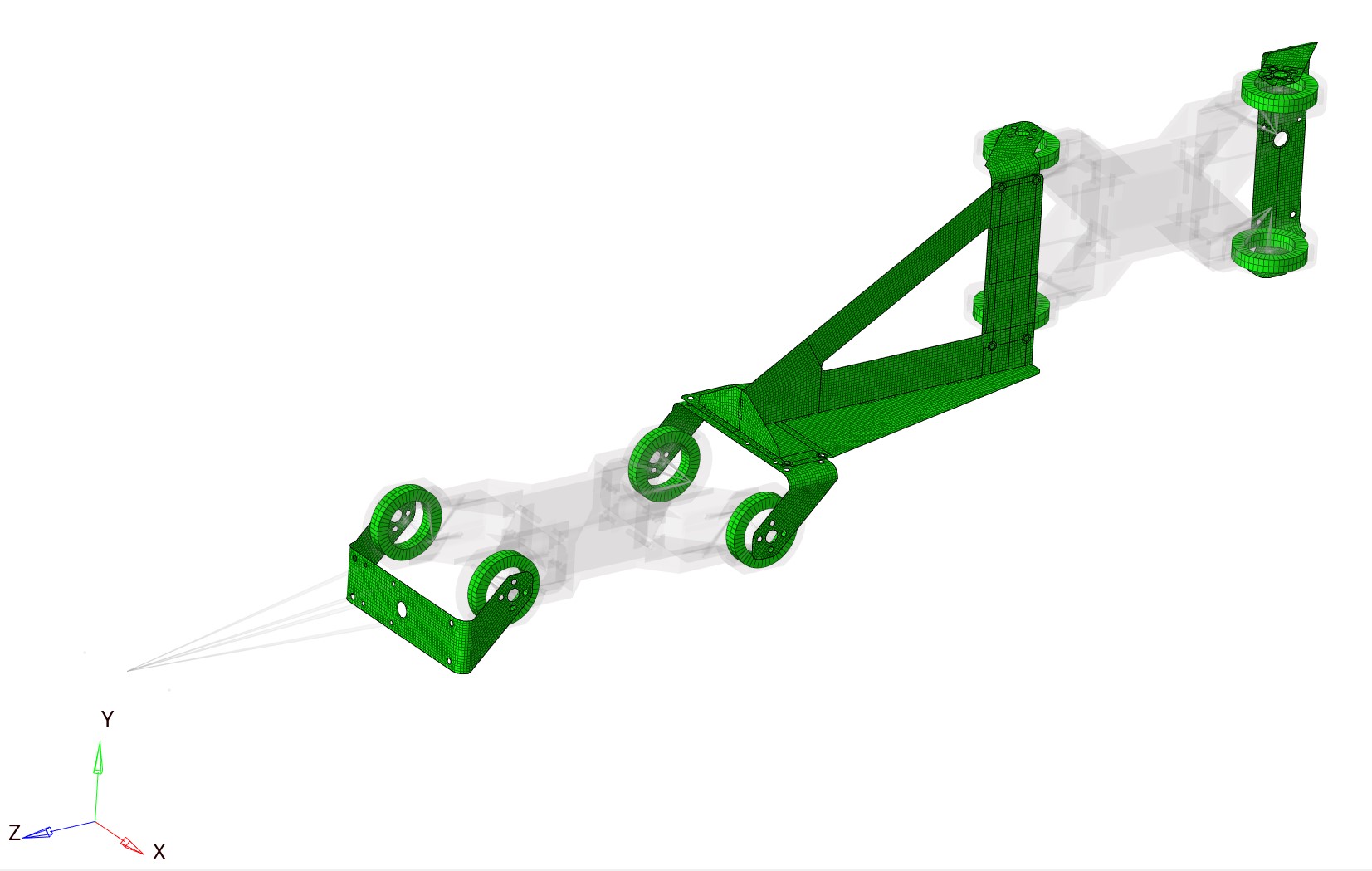
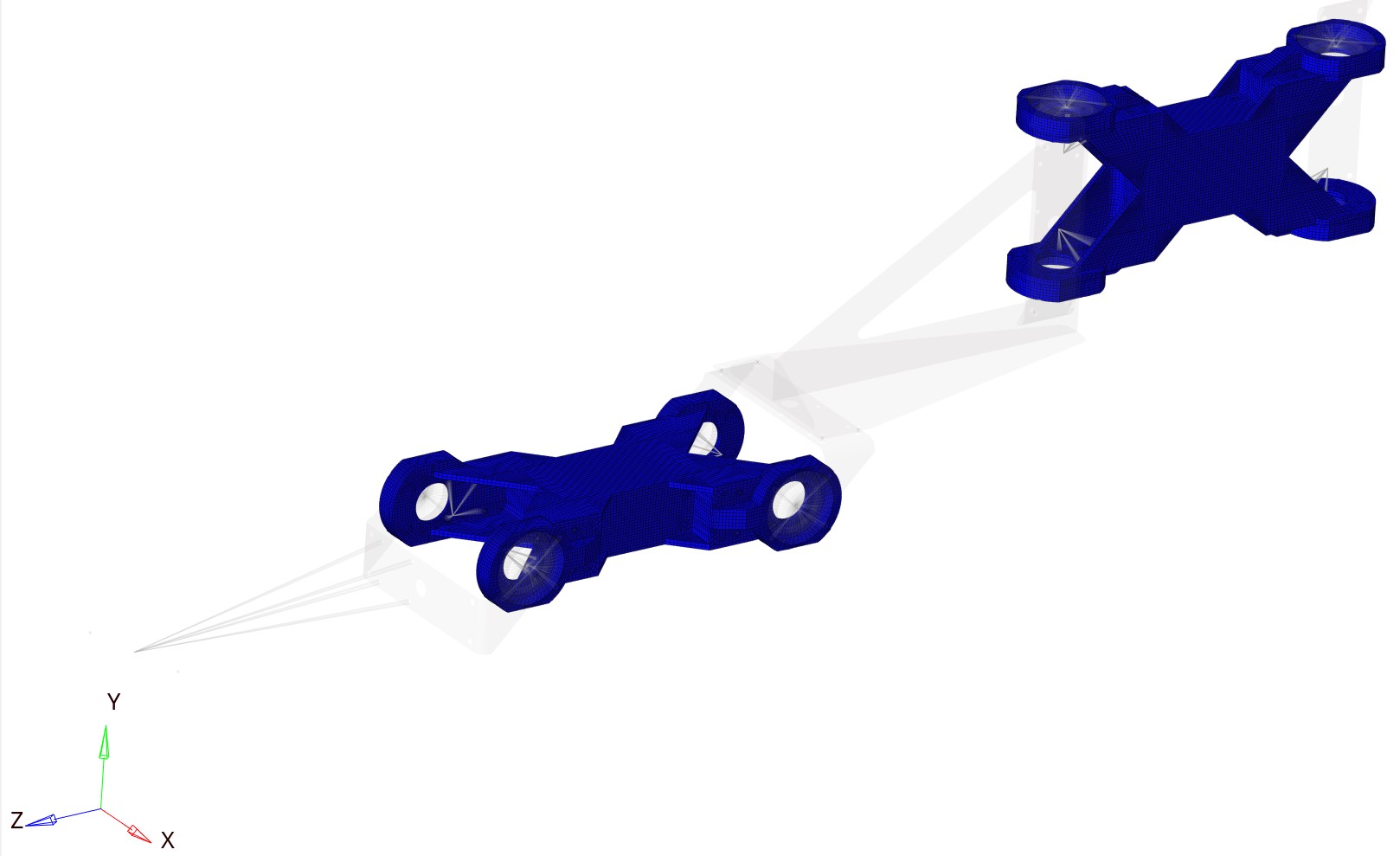
Para criar o MEF, é necessário simplificar o modelo para acelerar o cálculo. Decidiu-se considerar a base como absolutamente rígida e substituir a fixação dos nós do manipulador à base por condições de contorno (fixando os pontos de fixação do manipulador à base). Também se decidiu substituir a modelagem do último elo do manipulador (conjunto da garra) por um elo absolutamente rígido.

Figura 8 – vista geral do modelo de EF

Figura 9 – tipos de elementos usados no modelo
Decidiu-se modelar o suporte em forma de U e o suporte “aleta” com elementos planos do tipo QUAD4, já que uma das dimensões da peça (espessura) << que as outras 2 dimensões da peça. O QUAD4 é um elemento plano de 4 nós com 6 graus de liberdade por nó.

Figura 10 – MEF do suporte de aço em forma de U |

Figura 10 – MEF do suporte de aço em forma de U |

Figura 11 – MEF do suporte de aço “aleta”
Decidiu-se modelar o suporte de alumínio e o rolamento com elementos sólidos do tipo HEX8, pois são mais precisos que os tetra4. O HEX8 é um elemento sólido de 8 nós com 3 graus de liberdade por nó.

Figura 12 – MEF do suporte de alumínio |

Figura 12 – MEF do suporte de alumínio |
Modelagem da transmissão de forças e das conexões aparafusadas
Para modelar a transmissão de forças dos motores ao suporte e ao rolamento, decidiu-se modelá-la com um elemento do tipo RBE2. Também se decidiu substituir os parafusos que conectam os elementos por RBE2. O RBE2 é um elemento finito absolutamente rígido (o deslocamento do nó mestre é igual ao deslocamento dos nós escravos). A modelagem do servomotor é substituída por 1 elemento RBE2, em que os nós escravos são os nós de fixação do motor e o nó mestre é o elemento RBE2 do rolamento com o suporte de aço.
Há 4 maneiras de modelar parafusos:
- Primeira maneira: modelar os parafusos usando um elemento finito de viga de dois nós com 6 graus de liberdade em cada nó e vincular seus nós à superfície usando elementos RBE2 ou RBE3.
- Segunda maneira: condições de contorno na zona de fixação do parafuso.
- Terceira maneira: modelar os parafusos usando um elemento RBE2.
- Quarta maneira: modelar o parafuso usando um elemento finito sólido de oito nós na forma de um hexaedro com 3 graus de liberdade em cada nó. Para este método, é necessário especificar contatos entre o parafuso e a peça. Isso permite modelar com mais precisão o comportamento da conexão aparafusada, mas complica o MEF.
Usaremos o terceiro método de modelagem para acelerar o cálculo e a otimização.

Figura 14 – MEF da modelagem do servomotor

Figura 15 – elementos RBE2 substituindo os parafusos
Configuração da interação de contato
Entre o rolamento e o suporte de alumínio, decidiu-se criar uma interação de contato do tipo Slide. Para isso, é necessário criar superfícies de contato e especificar as superfícies que estarão em contato. Em seguida, é preciso configurar o CONTACT: selecionar a superfície mestre (MASTER) e a superfície escrava (SLAVE). Elas diferem no fato de que, durante o contato, o OPTISTRUCT verifica se a superfície escrava intersecta o plano da superfície mestre com pontos; se sim, o OPTISTRUCT calculará a área de contato com base nesses pontos de interseção.
A superfície mestre deve ser escolhida como a superfície com o maior tamanho de elemento. Também é importante especificar SRCHDIST e CLEARANCE (folga). O primeiro parâmetro indica a que distância considerar as superfícies em contato, enquanto o segundo parâmetro indica a folga.
Nessas análises, o contato do tipo SLIDE é um tipo de contato em que não há atrito entre as superfícies. Há uma configuração adicional de contato, N2S ou S2S. O primeiro tipo de contato é o mais rápido em termos de poder computacional, mas fornece com menor precisão a imagem da pressão de contato. O segundo é preciso, mas retarda significativamente o cálculo.

Figura 16 – interação de contato dos rolamentos e do suporte
Formação dos casos de carregamento
Para calcular o manipulador quanto à resistência estática, é necessário determinar os modos de carregamento.
Vamos definir o fator de segurança K como 1,5.
A força vertical é calculada como a massa da carga m vezes a aceleração da gravidade g vezes o fator de segurança K:
$F_y = m cdot g cdot K = 16.18,text{N}$
$F_x = varepsilon cdot R cdot m cdot K = 6.73 text{N}$
$F_z = omega^2 cdot R cdot m cdot K = 72.49 text{N}$
$M_x = left(J_{x,mathrm{cg}} + m cdot d_1^2right) cdot K cdot varepsilon + F_y cdot l_1
= 651 text{N}cdottext{mm}$
$M_y = left(J_{y,mathrm{cg}} + m cdot d_2^2right) cdot K cdot varepsilon + F_x cdot l_2
= 635 text{N}cdottext{mm}$
$M_z = left(J_{z,mathrm{cg}} + m cdot d_3^2right) cdot K cdot varepsilon
= 133 text{N}cdottext{mm}$
Tabela de referência de símbolos
| Símbolo | Descrição | Unidade de medida |
|---|---|---|
| Fy | Força vertical (peso) | N |
| Fx | Força horizontal (força de inércia tangencial) | N |
| Fz | Força longitudinal (força centrífuga) | N |
| Mx | Momento total em torno do eixo X | N·mm |
| My | Momento total em torno do eixo Y | N·mm |
| Mz | Momento de torção em torno do eixo Z | N·mm |
| m | Massa da carga | t |
| g | Aceleração da gravidade | mm/s² |
| K | Fator de segurança | Adimensional |
| ε | Aceleração angular | rad/s² |
| ω | Velocidade angular | rad/s |
| R | Distância do eixo de rotação ao CG da carga | mm |
| J_cg | Momento de inércia da carga em torno de seu CG (com índice x, y, z) | t·mm² |
| d | Distância do CG da carga ao eixo de rotação (com índice 1, 2, 3) | mm |
| l | Distância do ponto de aplicação da força ao eixo de rotação (com índice 1, 2) | mm |
5 Análise dos resultados
Os resultados do cálculo foram os seguintes:
| Caso de carregamento | Fx | Fy | Fz | Mx | My | Mz |
|---|---|---|---|---|---|---|
| Deslocamento máximo (mm) | 1.03 | 1.05 | 0.62 | 0.12 | 0.17 | 0.03 |
| Tensão máxima (MPa) | 93 | 92 | 65 | 10 | 14 | 4 |
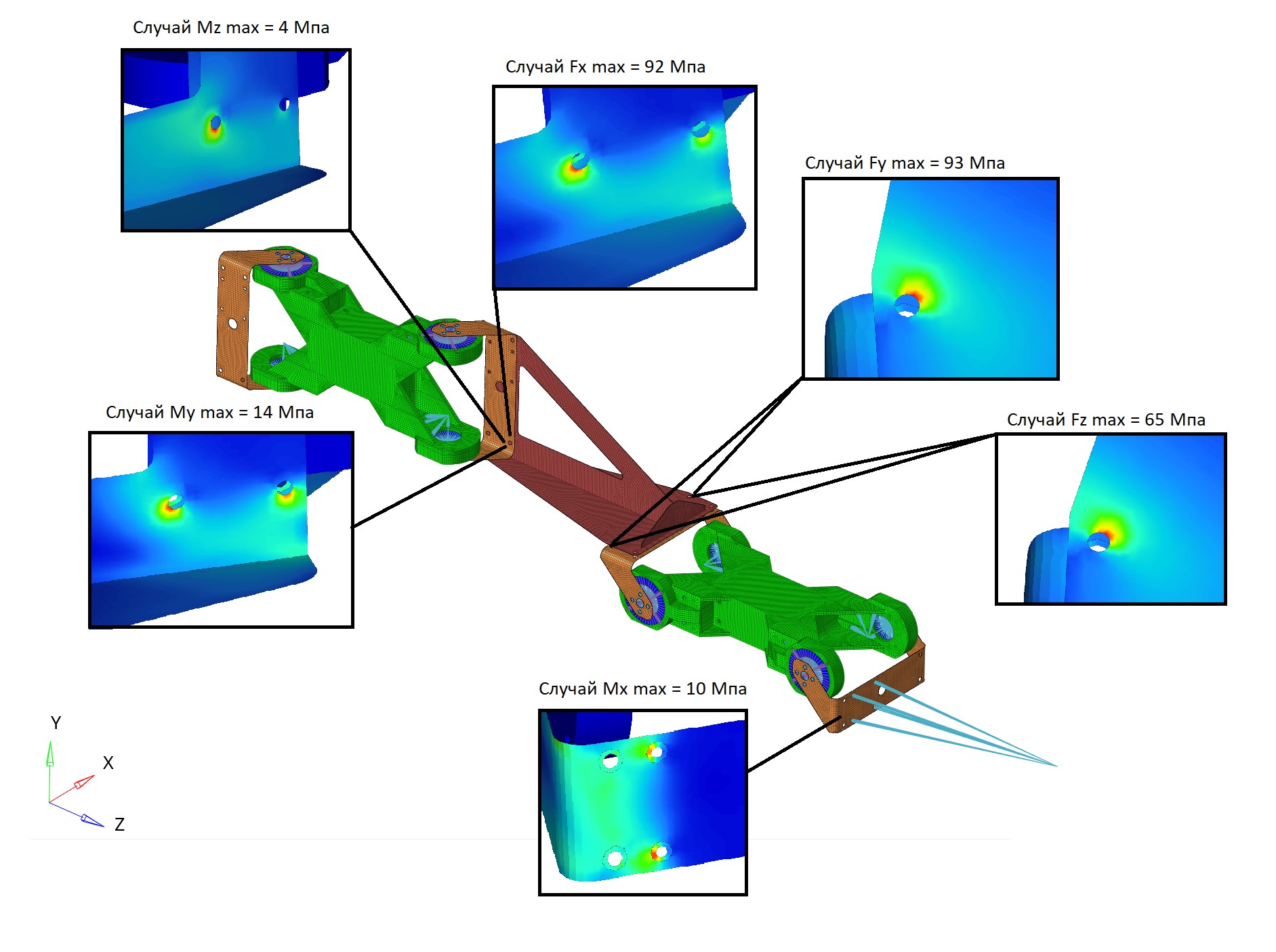
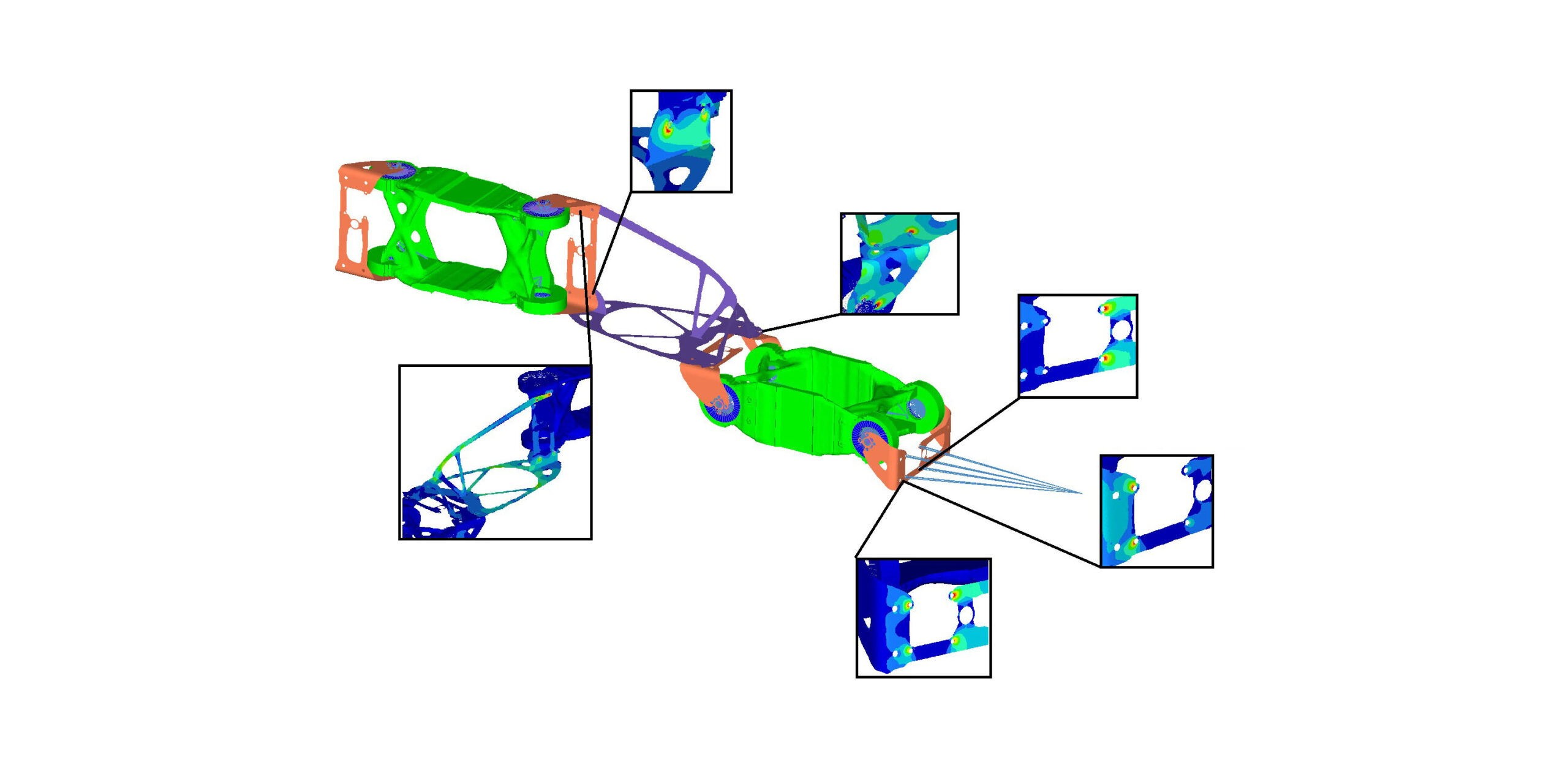
Figura 17 – localização das zonas mais carregadas, caso de carregamento e tensões que ocorrem nessas zonas
As tensões máximas ocorrem nos nós de fixação dos parafusos às peças. A aleta é submetida à maior tensão.
Fundamentos do método de otimização topológica (usando o algoritmo SIMP)
Os métodos de otimização dividem-se em duas categorias – projeto conceitual e refinamentos.
A otimização no nível conceitual significa realizar a otimização (de topologia ou de topografia) na etapa inicial do processo de projeto para criar a melhor forma a partir da qual prosseguir.
O programa de otimização essencialmente automatiza o processo projeto – análise – retroalimentação do modelo – reprojeto. Isso permite fazer alterações na estrutura conforme critérios de projeto sem alterar a topologia geral. A otimização de projeto pode basear-se na otimização de dimensões específicas, da forma ou de uma forma arbitrariamente escolhida.
A otimização topológica está relacionada à distribuição de material e à forma como os elementos estão conectados dentro da estrutura. Ela considera a “densidade equivalente”, ou pseudodensidade, de cada elemento como uma variável de projeto.
O método SIMP
O método de otimização topológica permite determinar a distribuição ótima de material em uma dada área de projeto, correspondente a dadas condições de contorno, modos de carregamento, bem como atendendo às restrições adicionais impostas. A ideia do método é determinar a distribuição ótima de material em cada parte da área de projeto. Para isso, a área de projeto é dividida em N elementos. Cada elemento está preenchido com material ou vazio. Consequentemente, o número de combinações diferentes será 2^N, em que N é o número de elementos.
Para resolver o problema de otimização pelo método SIMP, a densidade de material de cada elemento varia continuamente no intervalo de 0 a 1 ou de $rho_{min} $ – pseudodensidade mínima a 1:
$0 le rho_{min} le rho le 1$
Levando em conta essa condição, ao buscar o mínimo da função objetivo, a densidade do material é variada. Para resolver o problema, é preferível usar o “método da penalidade” com uma representação por potência das propriedades elásticas do material, que pode ser expressa como:
$E(rho_e) = rho_e^{p},E$
em que E é o módulo de elasticidade e p é o “coeficiente de penalidade”, que é sempre maior que 1, ou para a matriz de rigidez do elemento como:
$K(rho_e) = rho_e^{p},K$
em que K é a matriz de rigidez do elemento e p é o “coeficiente de penalidade”, que é sempre maior que 1.
Flexibilidade e rigidez
A rigidez global da estrutura também pode ser usada como função objetivo. Isso também pode ser visto como minimizar a flexibilidade para uma dada redução de massa. A flexibilidade é uma medida da mobilidade global ou da “maciez” da estrutura – é o inverso da rigidez. A flexibilidade total é igual à soma das energias de deformação, ou energia elástica, nos elementos. Minimizar a flexibilidade total equivale a maximizar a rigidez total.
O algoritmo de otimização, por meio de um processo iterativo, busca determinar as densidades dos elementos que minimizam a flexibilidade global da estrutura:
$C(rho) = sum_{i=1}^{N} rho_i^{p}, mathbf{u}_i^{mathsf{T}}, mathbf{k}_i, mathbf{u}_i$
em que u é o vetor de deslocamento do i-ésimo elemento, k é a matriz de rigidez do i-ésimo elemento, ρ é a pseudodensidade do elemento correspondente. A equação tem a forma:
$K,U = F$
em que K é a matriz de rigidez, U é a matriz de deslocamento, F é o vetor de forças.
Considerações sobre a manufaturabilidade
Uma estrutura cuja forma é determinada com base em otimização tridimensional, em muitos casos, não pode ser fabricada com tecnologias padrão. Portanto, nesses casos, é necessária uma avaliação da manufaturabilidade da geometria das estruturas otimizadas. Além disso, para resolver esse problema, certas restrições podem ser definidas durante a otimização, contribuindo para obter uma geometria pronta para fabricação por diversas tecnologias de produção tradicionais.
Portanto, para a otimização pelo algoritmo acima, para cada peça otimizada é necessário criar um Des space – uma geometria estendida na qual será realizada a busca pelo projeto ótimo.

Figura 18 – Des space do suporte de aço em forma de U |

Figura 19 – Des space do suporte de alumínio |

Figura 20 – Des space do suporte de aço “aleta”
Parâmetros e restrições da otimização
Para realizar a otimização, é necessário criar variáveis ou parâmetros (respostas) do modelo pelos quais a peça será otimizada. Criamos 2 respostas, ou parâmetros, do sistema:
Primeiro parâmetro – wcompliance (flexibilidade ponderada). A relação tem a forma:
$C_w = sum_{i} W_i , C_i = frac{1}{2}sum_{i} W_i , mathbf{u}_i^{mathsf{T}} , mathbf{f}_i$
Segundo parâmetro – massa no espaço de projeto dado. Esse parâmetro nos dá a massa da área de projeto. Ele pode ser definido para toda a estrutura, bem como para propriedades (componentes) e materiais individuais ou para grupos de propriedades (componentes) e materiais.
Além da função objetivo (a saber, reduzir a flexibilidade), é necessário especificar restrições. dconstrain é uma restrição que o solver não deve violar. Nos cálculos, a massa não deve diferir da massa da peça anterior em mais de 15%. Isso significa que a restrição de massa para cada zona de projeto será diferente. Nesse programa, também é possível especificar uma restrição de volume, volume relativo ou massa relativa. A diferença entre massa relativa e volume relativo é que a massa relativa inclui a massa de todo o modelo no cálculo, enquanto a fração de volume considera apenas a área de projeto.
Para encontrar a forma mais ótima, é necessário criar uma função objetivo. Essa função é o extremo que devemos encontrar. Aqui são especificadas diversas respostas do sistema (deslocamento, ângulo de torção, tensões etc.). Neste caso, especificamos wcompliance como a função cujo mínimo o programa buscará.
Em seguida, definimos restrições adicionais de otimização. Além da massa, uma restrição adicional será também a tensão máxima admissível de 150 MPa. Esse parâmetro deve estar abaixo do limite de escoamento do material, pois, ao atingir o limite de escoamento, a peça se deformará plasticamente, o que pode levar a consequências muito graves. Deve-se entender que o valor da restrição de tensão será comparado com a tensão no elemento segundo a teoria de von Mises.
Restrições de fabricação no OptiStruct
O problema da otimização topológica é que os conceitos de projeto desenvolvidos muitas vezes não são manufaturáveis. Outro problema é que a solução do problema de otimização topológica pode depender da malha se as medidas apropriadas não forem tomadas.
O OptiStruct oferece vários métodos diferentes para considerar a manufaturabilidade ao realizar a otimização topológica:
mindim – controla o menor tamanho que deve ser preservado ao buscar a topologia, e também minimiza o efeito de tabuleiro de xadrez criado pela malha e proporciona um projeto mais discreto. Como a otimização exige um valor discreto de 1 ou 0 para os elementos, essa restrição normalmente melhora a clareza do projeto ao eliminar elementos intermediários que de outra forma poderiam se formar.
draw direction – no processo de fundição ou fresagem, é impossível criar cavidades que não sejam abertas e alinhadas na direção do deslizamento da matriz. Projetos resultantes da otimização topológica frequentemente contêm cavidades inadequadas para fundição ou fresagem. Converter tal solução de projeto em um projeto manufaturável pode ser extremamente difícil, se não impossível.
O OptiStruct permite definir restrições de direção de extração para que uma determinada topologia permita o deslizamento da matriz em uma dada direção.
Estão disponíveis duas opções de extração:
- The “SINGLE” pressupõe que será usada uma matriz, movendo-se em uma dada direção de extração. A superfície inferior da peça fundida é uma parte de trabalho predefinida da matriz.
- The “SPLIT” implica que serão usadas duas matrizes para fundir a peça descrita neste cartão DTPL, separando-se em uma dada direção de extração.
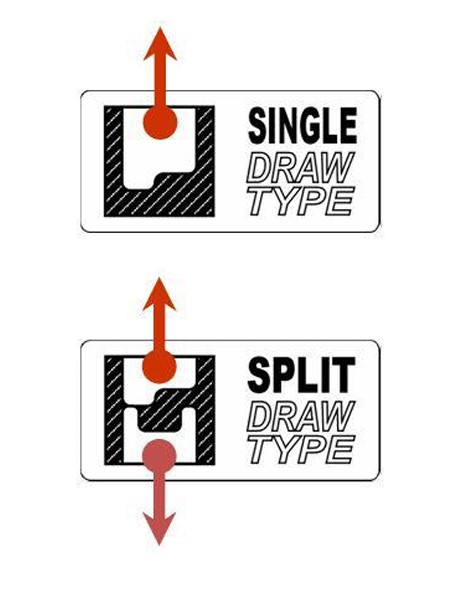
Figura 21 – diferença entre draw single e draw split
Ao usar a opção de extração ‘SINGLE’, pode haver restrições na fabricação por estampagem ou em chapa metálica. Esse parâmetro acelera a evolução de uma estrutura interpretável como uma casca 3D, área de projeto 3D. Isso permite projetar cascas 2D ou peças estampadas a partir de uma área de projeto 3D, proporcionando maior flexibilidade de projeto.
A peça pode conter não apenas uma área de projeto, mas também uma área não destinada ao projeto. Essas áreas não destinadas ao projeto devem ser definidas como obstáculos ao processo. Isso preserva a capacidade de fundir o projeto final. Observe também que existe um tamanho mínimo de elemento padrão para uso com restrições de direção de extração. Esse valor é definido como três vezes o tamanho médio da célula para os componentes correspondentes. Assim, a densidade da malha do modelo e a fração de volume exigida devem ser escolhidas de modo que haja material suficiente para preencher os elementos de tamanho mínimo padrão. O usuário pode especificar o tamanho mínimo de elemento desejado para cada parte estrutural.
Pattern repetition – é uma técnica que permite conectar diversos componentes estruturais de modo a criar padrões topológicos semelhantes.
Pattern grouping – vinculação de variáveis para que se formem as formas estruturais desejadas. Lineares, planares, circulares, radiais etc. Os elementos estruturais conformados são controlados por variáveis individuais, garantindo que o projeto corresponda ao padrão desejado. As opções de agrupamento de padrões de plano único, dois planos, três planos e simetria cíclica também usam uma abordagem semelhante para garantir que a simetria seja criada na solução.
Resultados da otimização do suporte de aço “aleta”
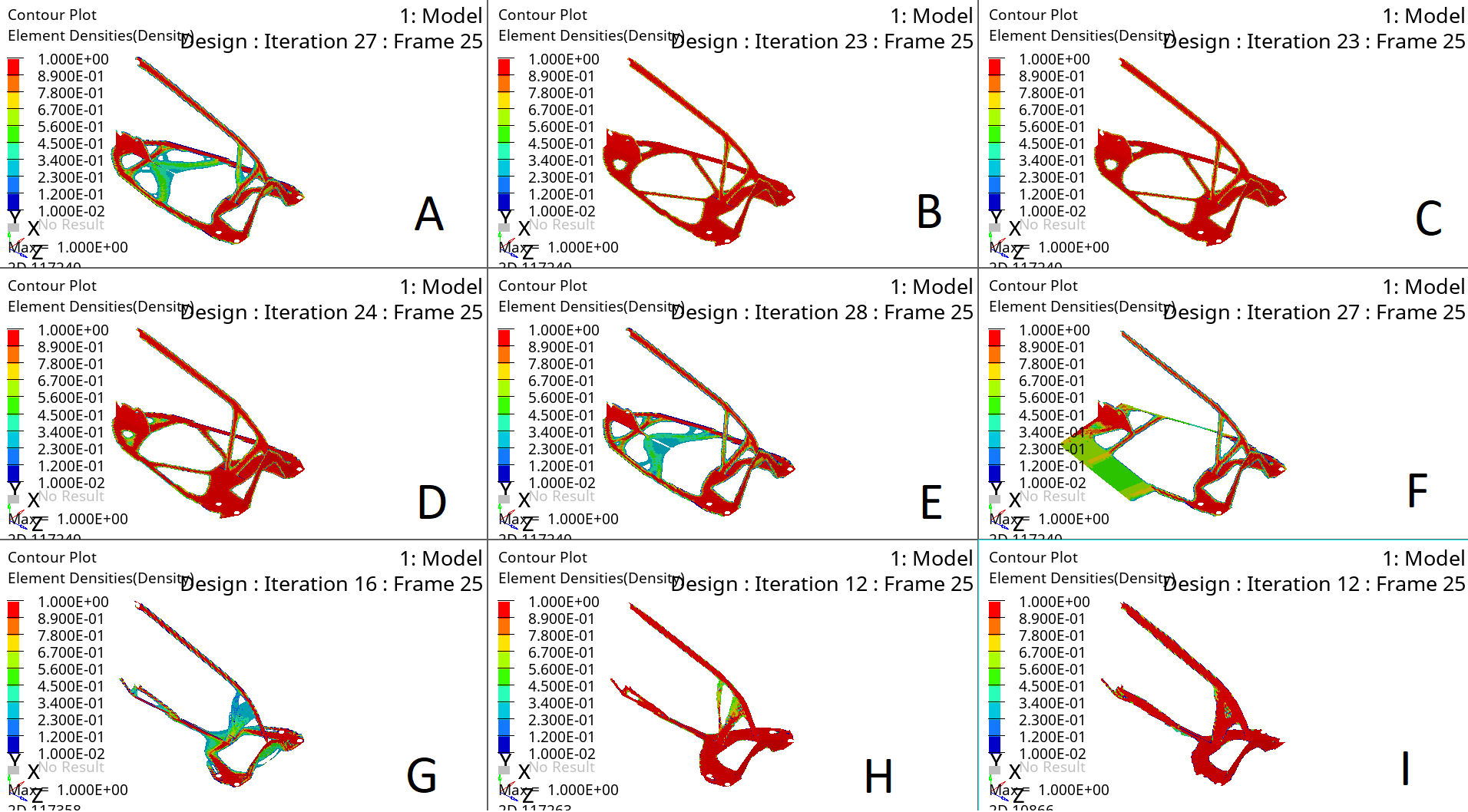
Figura 22 – variantes de otimização obtidas para a aleta
| A | B | C | D | E | F | G | H | I | |
|---|---|---|---|---|---|---|---|---|---|
| Material | Aço | Aço | Aço | Aço | Aço | Aço | Aço | Aço | Aço |
| Espessura | 8 | 6 | 5 | 4 | 3 | 6 | 15 | 8 | 6 |
| Número de cargas | 6 | 6 | 6 | 6 | 6 | 2 | 1 | 1 | 1 |
Como se vê nos padrões de otimização obtidos, o plano YZ do suporte é responsável pela rigidez à flexão do manipulador em torno do eixo X. Recomenda-se aumentar essa parede até uma espessura de 6 mm; essa parte é a que mais contribui para a rigidez ao longo do eixo Y. O plano XZ do suporte é responsável pela flexão em torno do eixo Y, e esse plano pode ser feito com 3 mm de espessura. A escolha do contorno específico e de seu traçado depende apenas do engenheiro. As zonas vermelhas são as mais carregadas, enquanto a borda amarelo-esverdeada representa zonas opcionais, e cabe ao engenheiro decidir incluí-las ou não.
Resultados da otimização do suporte de aço em forma de U
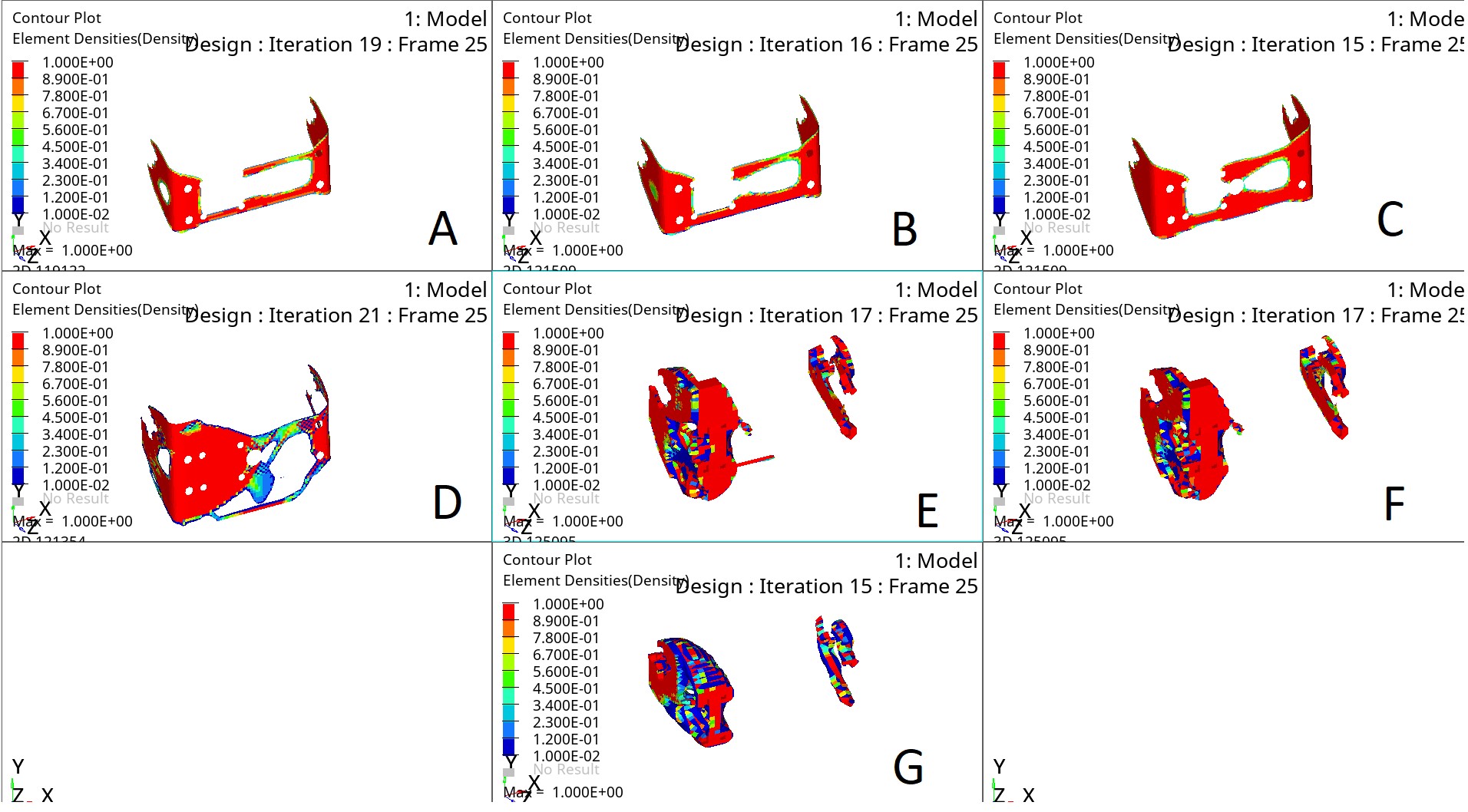
Figura 23 – variantes de otimização obtidas para o suporte de aço em forma de U
| A | B | C | D | E | F | G | |
|---|---|---|---|---|---|---|---|
| Material | Aço | Aço | Aço | Aço | Aço | Aço | Aço |
| Espessura | 8 | 6 | 5 | 3 | |||
| Número de cargas | 6 | 6 | 6 | 1 | 1 | 1 | 1 |
Como se vê nos padrões de otimização obtidos do suporte de aço em forma de U, o furo central não é carregado. Também se recomenda ampliar a base do suporte e aumentar a espessura para 6 mm.
Resultados da otimização do suporte de alumínio
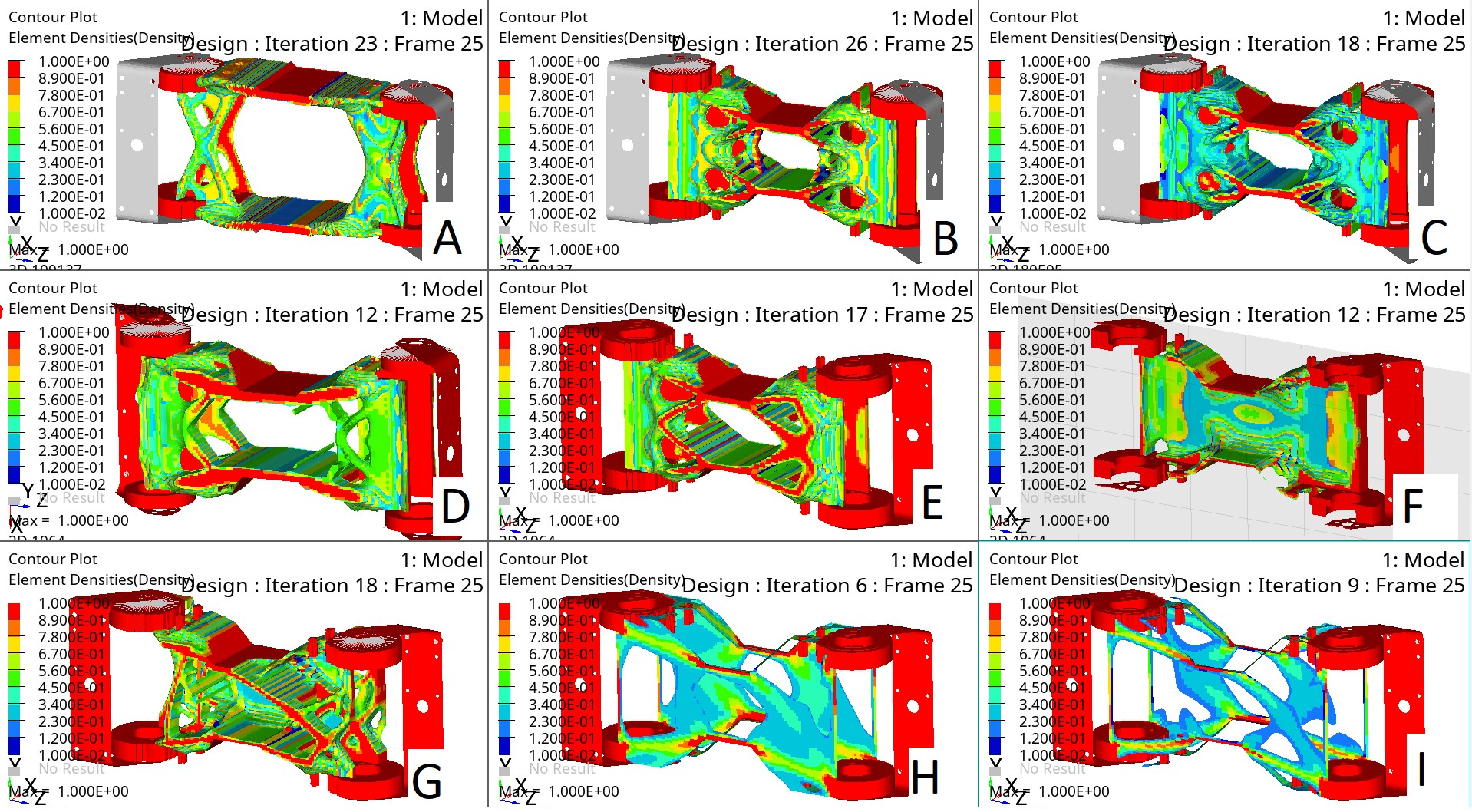
Figura 24 – variantes de otimização obtidas para o suporte de alumínio
| A | B | C | D | E | F | G | H | I | |
|---|---|---|---|---|---|---|---|---|---|
| Material | Alumínio | Alumínio | Alumínio | Alumínio | Alumínio | Alumínio | Aço | Aço | Aço |
| Simetria | yes | yes | yes | yes | yes | yes | no | yes | yes |
| Número de cargas | 6 | 6 | 6 | 6 | 2 | 2 | 1 | 1 | 1 |
Como se vê nos padrões de otimização obtidos, substituir o suporte de alumínio por aço não é possível devido à massa demasiado pequena. A maioria dos padrões de otimização mostra que é melhor distribuir a massa ao longo das paredes. Há uma explicação para isso. Como o manipulador trabalha em flexão, o otimizador busca a forma de seção transversal mais ótima para flexão, isto é, uma viga I. Já que a parte central está subcarregada e as partes mais externas são as que mais contribuem para a rigidez.

Figura 25 – a seção transversal mais rígida à flexão
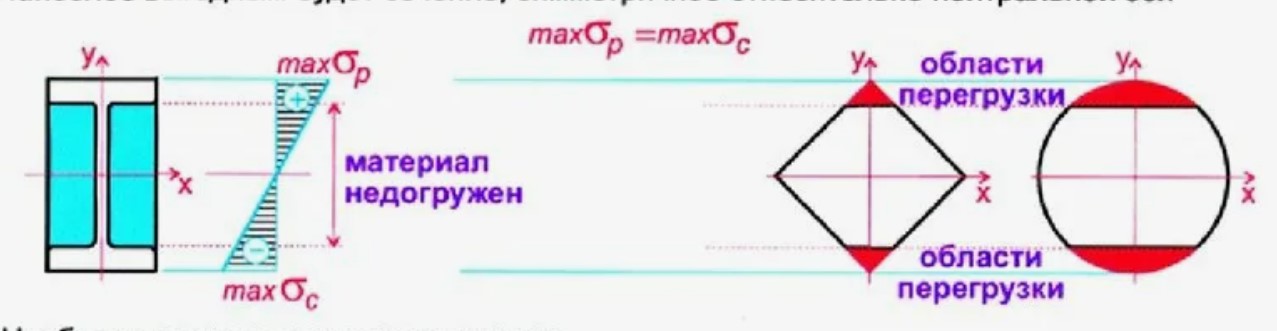
Figura 25 – a seção transversal mais rígida à flexão
Cálculo de verificação
Após selecionar a forma, deve-se realizar um cálculo de verificação:

Figura 26 – MEF da estrutura otimizada
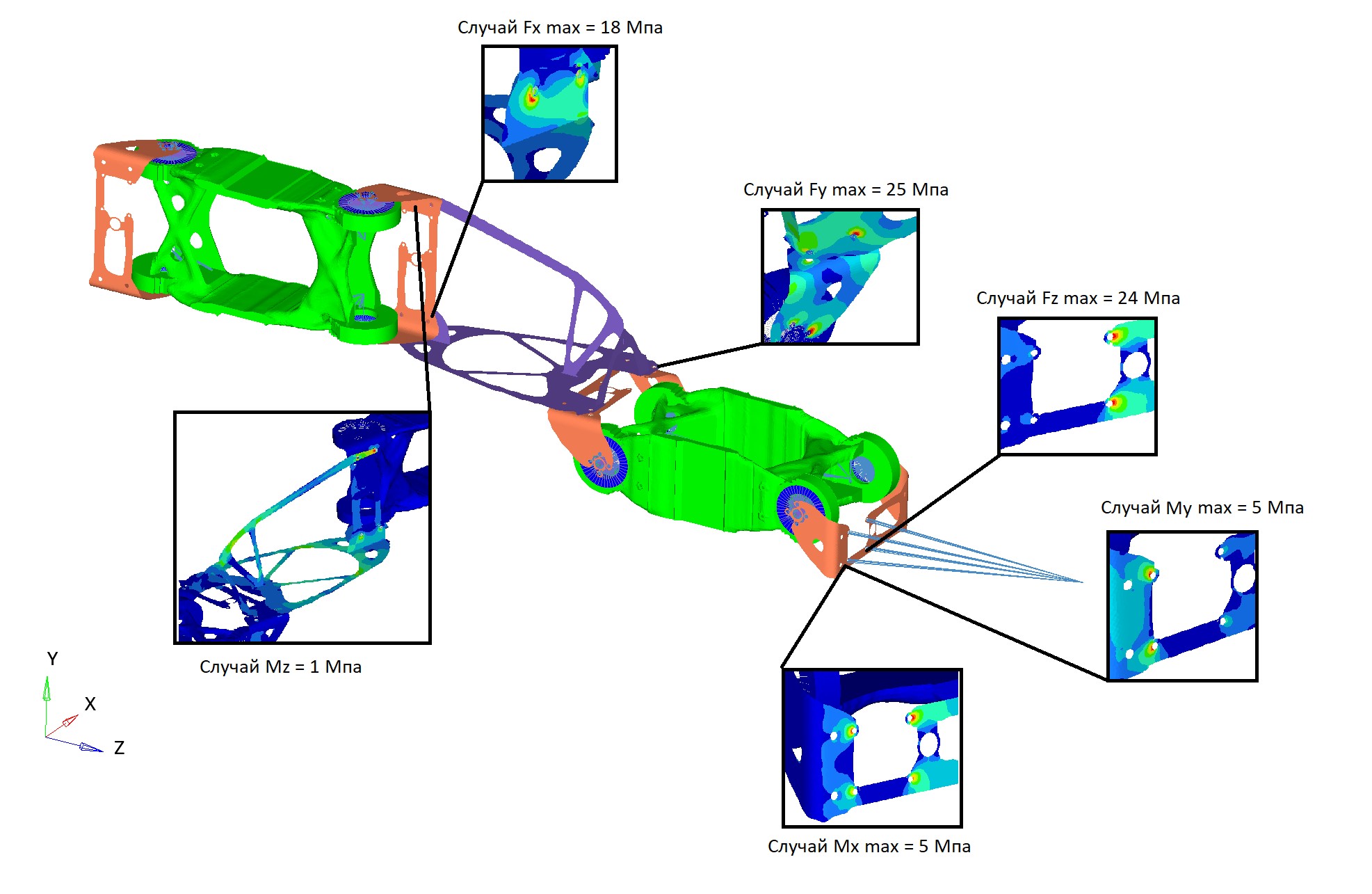
Figura 27 – resultados de cálculo obtidos da estrutura otimizada
Resultados do projeto otimizado
| Caso de carregamento | Fx | Fy | Fz | Mx | My | Mz |
|---|---|---|---|---|---|---|
| Deslocamento máximo (mm) | 0.41 | 0.31 | 0.21 | 0.04 | 0.05 | 0.01 |
| Tensão máxima (MPa) | 18 | 25 | 24 | 5 | 5 | 1 |
As tensões máximas ocorrem nos nós de fixação dos parafusos às peças.

Figura 28 – versão final do manipulador com rigidez estrutural aumentada
Comparação: projeto original e otimizado
| Parâmetro | Projeto original | Projeto otimizado |
|---|---|---|
| Massa | 1.937 kg | 2.376 kg |
| Tensão máx. | 93 MPa | 25 MPa |
| Deflexão devido a Fy | 1.05 mm | 0.41 mm |
| Deflexão devido a Fx | 1.03 mm | 0.31 mm |
| Deflexão devido a Fz | 0.62 mm | 0.21 mm |
| Deflexão devido a Mx | 0.12 mm | 0.04 mm |
| Deflexão devido a My | 0.17 mm | 0.05 mm |
| Deflexão devido a Mz | 0.03 mm | 0.01 mm |
Conclusões
Os requisitos técnicos não foram atendidos; to ensure a rigidez exigida, a massa permitida deveria ser aumentada em mais de 15% em relação ao valor atual. Foi obtida uma melhoria significativa de rigidez: como resultado da otimização topológica dos elementos estruturais principais, alcançou-se uma redução da flexibilidade. Os deslocamentos do manipulador diminuíram 57–76% dependendo do caso de carregamento.
O indicador-alvo não foi alcançado: apesar da melhoria significativa, a deflexão final da ponta do manipulador (deslocamento máximo de 0,41 mm) excedeu o valor exigido pelos requisitos técnicos (no máximo 0,3 mm). Assim, o principal requisito das especificações técnicas não pôde ser plenamente atendido.
Recomendações para alcançar os parâmetros exigidos
Para alcançar os parâmetros exigidos, considere as seguintes opções:
- Aumentar a massa permitida além da restrição atual de 15%
- Aumentar o número de elementos estruturais não idênticos, tornando cada elemento estrutural subsequente, a partir da base de fixação do manipulador, mais leve
- Substituir os suportes de alumínio por suportes de aço – como o alumínio tem módulo de elasticidade de 70 GPa e o aço tem 200 GPa, isso aumentará a rigidez da peça em 2,5 vezes sob a mesma carga
- Considerar materiais alternativos com módulo de elasticidade maior que o do alumínio e densidade menor que a do aço
- Deslocar o centro de massa o mais próximo possível da base para reduzir os momentos de inércia
Eficácia do método de otimização
A aplicação do método de otimização topológica comprovou sua eficácia na busca pela distribuição ótima de material em dadas áreas de projeto (Des space). O método permitiu identificar zonas carregadas e descarregadas das peças e formular recomendações específicas para alterar sua geometria. No entanto, a manufaturabilidade das soluções não é a melhor.
Soluções de projeto específicas obtidas
Para cada um dos três suportes otimizados, foram obtidas variantes com base nas quais novas geometrias foram desenvolvidas. É importante entender que, ao traçar os elementos estruturais, a massa será maior que a calculada, devido aos limites pouco nítidos das formas obtidas, ao passo que, ao traçar, um limite nítido é definido.
For the steel U-shaped bracket: Recomenda-se ampliar a base e aumentar para 6 mm a espessura da parede responsável pela rigidez à flexão.
For the aluminum bracket: O otimizador mostrou a conveniência de distribuir a massa ao longo das paredes, buscando uma forma de viga I.
For the steel “fin” bracket: Recomenda-se aumentar a espessura da parede vertical para 6 mm. A base pode ser mantida em 3 mm ou aumentada para 6 mm.
Verificação de resistência
O cálculo de verificação da estrutura otimizada mostrou que as tensões máximas nas peças diminuíram significativamente (de 93 MPa para 25 MPa), o que está significativamente abaixo do limite de escoamento dos materiais e proporciona uma margem de segurança aumentada. Ao mesmo tempo, a restrição de massa foi respeitada (aumento de no máximo 15%).
Conclusão final
Obteve-se uma estrutura de manipulador mais rígida e mais resistente que, no entanto, não atende plenamente ao requisito inicial de deflexão ≤ 0,3 mm. Os resultados e a metodologia obtidos são uma base sólida para futuras iterações de projeto voltadas ao pleno atendimento dos requisitos técnicos, possivelmente por meio do uso de materiais mais rígidos ou de alterações adicionais no esquema cinemático.
ótimo artigo, rigidez é sempre subestimada em braços DIY. valeu pelos números reais de deflexão
rigidez estrutural é o que separa um braço de brinquedo de um braço útil, ótimo artigo
vale mais reforçar a estrutura ou usar juntas mais rigidas pra reduzir deflexão?
Geralmente as juntas são o elo mais fraco, então comece por elas: backlash e flexão no trem de engrenagens dominam a deflexão. Reforçar os elos só ajuda depois que as juntas já estão rígidas.
troquei meus perfis impressos por aluminio e a diferença na deflexao foi absurda