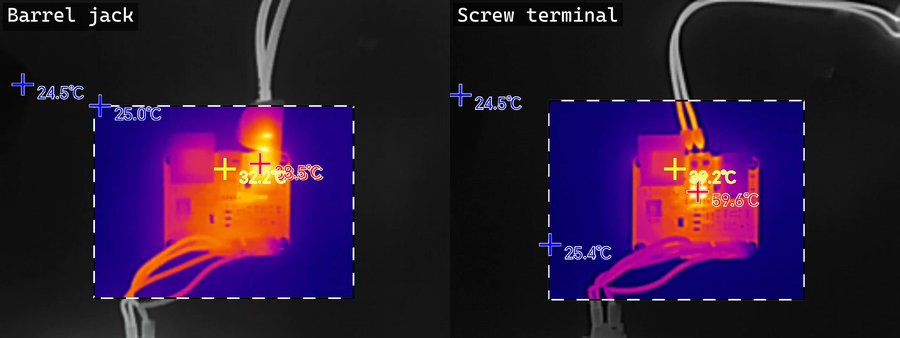
Тестирование плат-драйверов сервоприводов Waveshare под нагрузкой
Эмпирическое тепловое нагрузочное тестирование двух плат-драйверов сервоприводов Waveshare с последо...
Boris Kotov
03 Май 2026
Эмпирическое тепловое нагрузочное тестирование двух плат-драйверов сервоприводов Waveshare с последо...
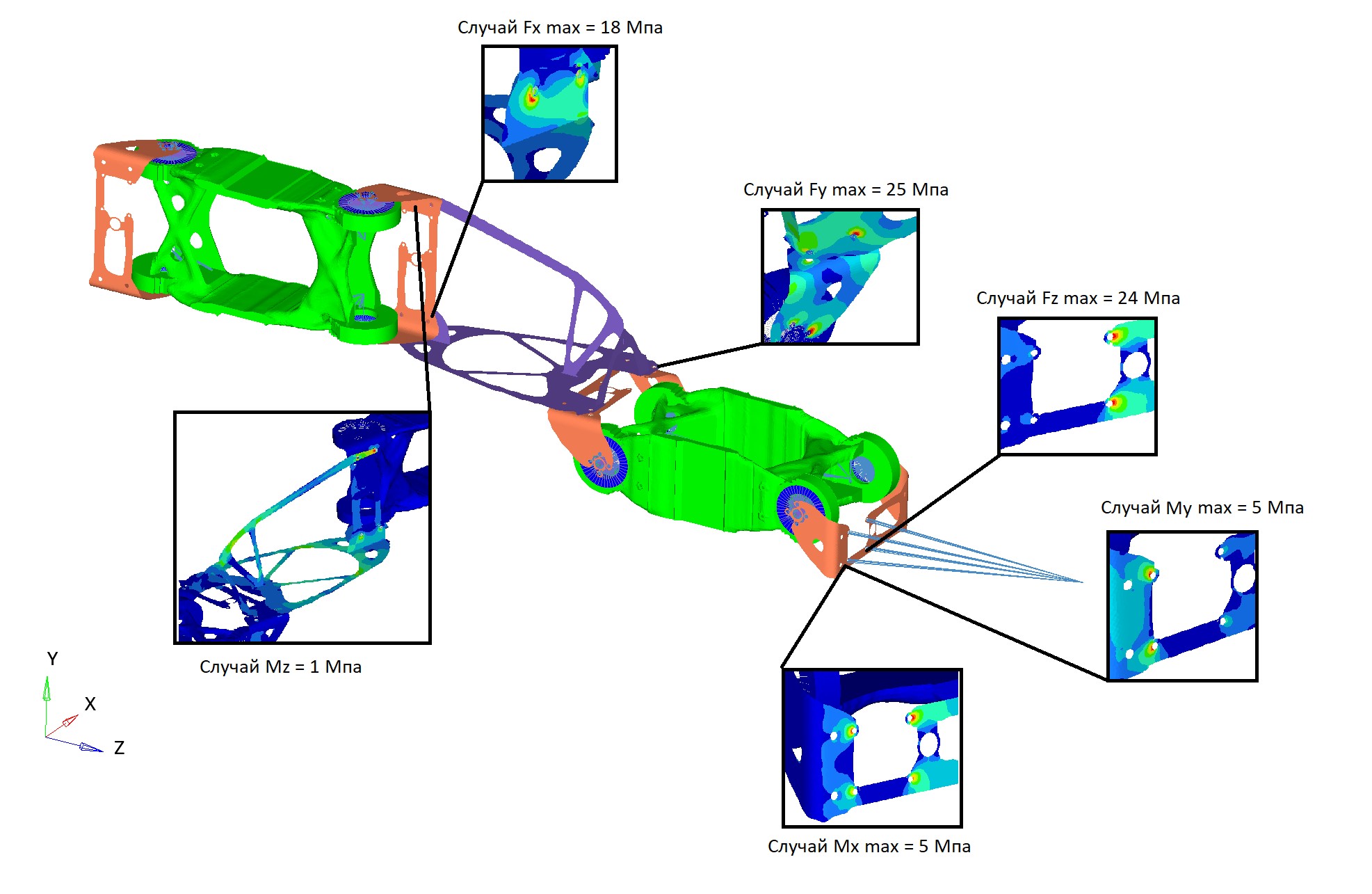
В этом исследовании представлена топологическая оптимизация манипулятора робота с помощью алгоритма ...

Комплексная эмпирическая оценка сервопривода Feetech STS3250 с последовательной шиной. Испытания пок...

Подробный обзор сервопривода Feetech STS3215 — его реальной производительности, точности и поведения...
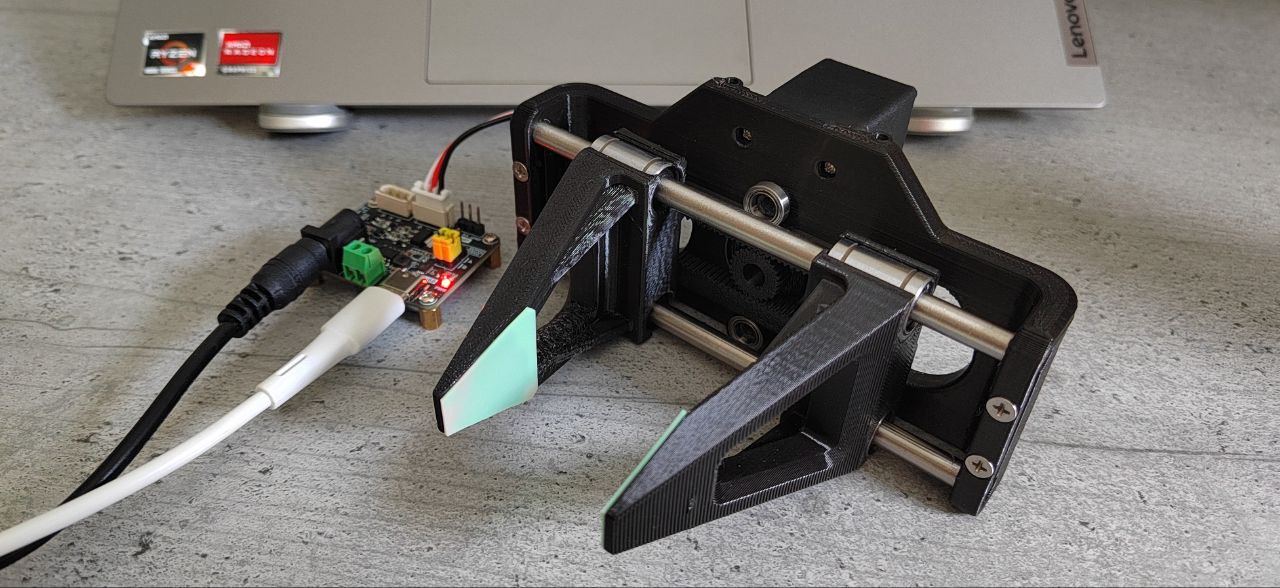
Захват — это механическое или роботизированное устройство, предназначенное для захвата, удержания, м...
Я хочу рассказать, как происходил выбор важнейшего компонента манипулятора робота — электродвигателе...
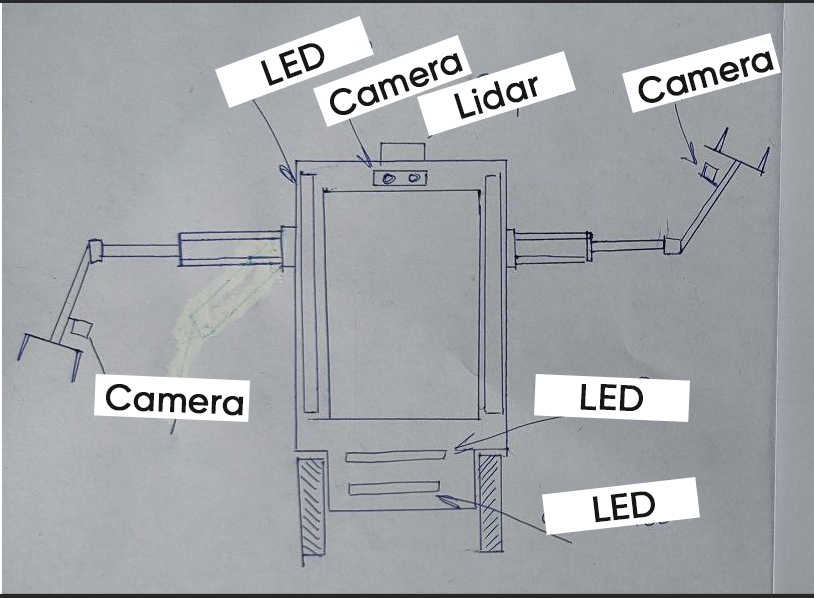
В мае мы завершили первую вариацию дизайна Robo 9, показав его эволюцию от первоначальной концепции ...
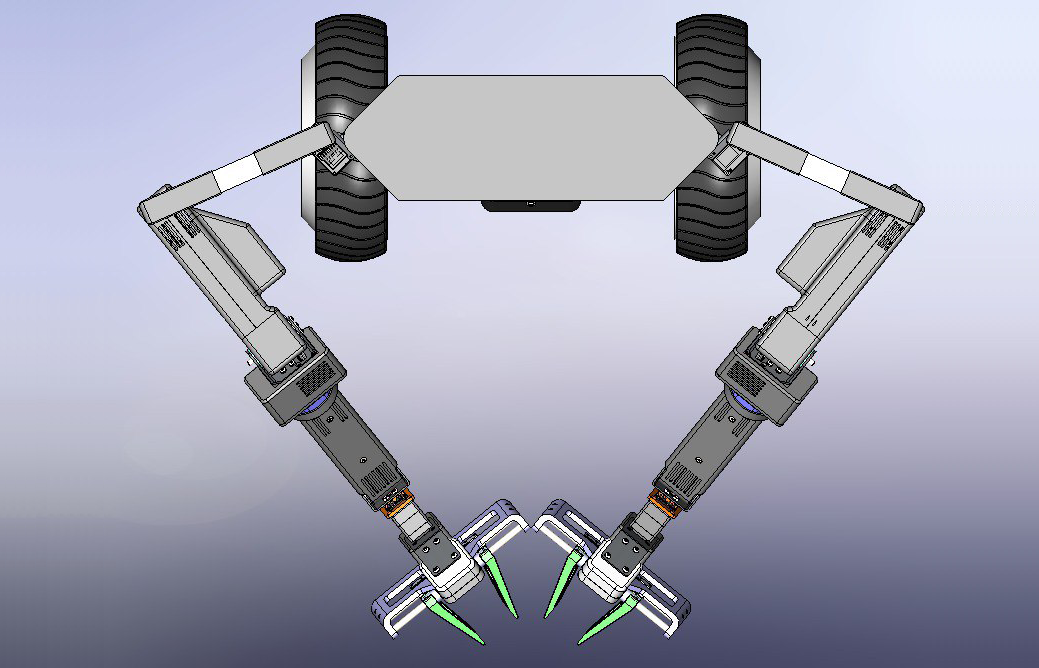
За последние два месяца мы продвинули исследовательского робота Robo 9, завершив его конструкцию и д...
ALOHA 2 ломает эту парадигму. Это не просто очередной исследовательский проект, а смелый шаг к демок...
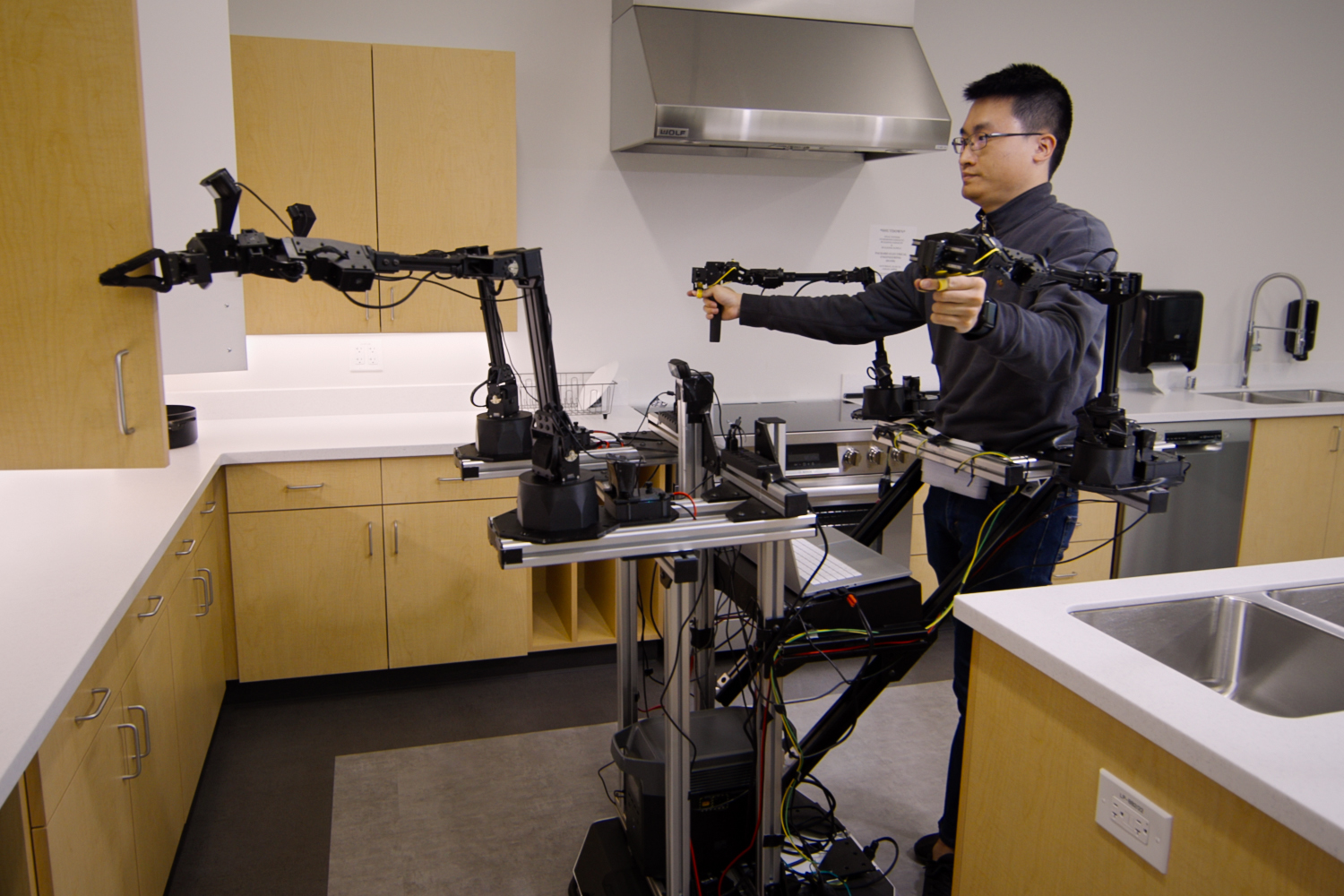
Проект Mobile ALOHA, разработанный командой Стэнфордского университета совместно с Boston Dynamics A...
Мы ценим вашу конфиденциальность
Мы используем файлы cookie, чтобы улучшить ваш опыт просмотра, показывать персонализированную рекламу или контент и анализировать наш трафик. Вы можете принять все, отклонить необязательные или выбрать, какие файлы cookie разрешить. Политика конфиденциальности
Управление файлами cookie
Нужны для работы сайта и не могут быть отключены.
Помогают понять, как посетители используют сайт.
Используются для показа релевантной рекламы и оценки её эффективности.
Включают расширенные функции и персонализацию.