Создание манипулятора с открытым исходным кодом. Захват
 12819
12819
Хочу поделиться деталями того, как продвигается разработка нашего доступного манипулятора. Сейчас мы активно готовимся к этапу сборки первого прототипа роборуки.
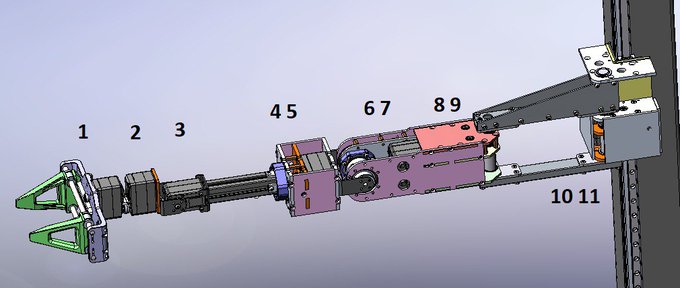
Роборука с 7 степенями свободы
Мы поставили довольно амбициозную цель: достичь характеристик, сопоставимых с ведущими исследовательскими манипуляторами — длина 650 мм, 7 степеней свободы, грузоподъёмность до 3 кг и точность позиционирования в пределах 1 мм. Все исходные файлы и наработки будут опубликованы открыто — или почти все, в зависимости от уровня поддержки со стороны сообщества робототехников.
Что такое захват
Первое, чем мы готовы поделиться, — это захват.
Описание: Захват — это механическое или роботизированное устройство, предназначенное для захватывания, удержания, манипуляции или транспортировки объектов. Он служит «кистью», или рабочим органом, манипулятора или системы автоматизации, позволяя роботу взаимодействовать с физическим миром, захватывая и отпуская объекты.
Захват доступен как открытый исходный код на GitHub.
Мы рассмотрели множество вариантов конструкции захвата и в итоге выбрали механизм с параллельными губками. Критерии выбора конструкции были такими:
- Простота конструкции
- Способность захватывать круглые объекты
- Способность поднимать плоские объекты со стола
- Минимальное использование сервоприводов
- Стоимость и надёжность конструкции
Захват с одной поворотной губкой
Пожалуй, одна из самых простых конструкций захвата, что нам встретились, — захват с одной поворотной губкой — это схема, где одна губка неподвижна, а другая закреплена прямо на валу сервомотора.
Захват с одной поворотной губкой (3D-вид)
- Недостаток этого решения в том, что передняя кромка подвижной губки движется по дуге. Поэтому, чтобы захватить мелкий объект кончиками захвата, нужно учитывать, что при закрытии объект должен располагаться вдоль этой дуговой траектории.
- Второй недостаток в том, что, поскольку движется только одна губка, максимальная ширина захватываемого объекта ограничена ходом этой единственной подвижной губки. Чтобы захватывать тот же объём, что и параллельный захват, губки должны быть значительно длиннее.
Сравнение длины губок. Захват с одной поворотной губкой против параллельного захвата
- Третий недостаток в том, что такой захват асимметричен, то есть центр масс всегда смещён в сторону подвижной части.
Учитывая все эти недостатки захвата с одной поворотной губкой, мы решили вместо него изучить симметричные конструкции параллельного захвата.
Параллельный захват на четырёхзвеннике против обычного параллельного захвата
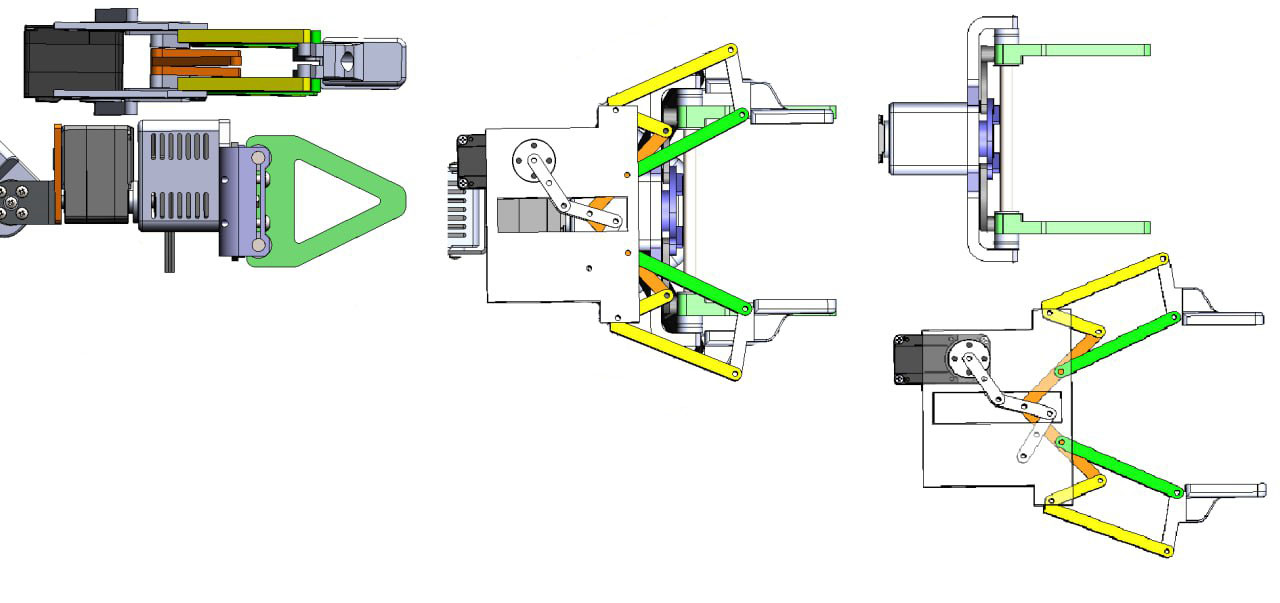
Параллельный захват на четырёхзвеннике против обычного параллельного захвата
На изображении выше показаны две версии захвата с параллельными губками на одном сервомоторе. Параллельный захват на четырёхзвеннике, где губки раскрываются под углом, оказывается заметно сложнее по числу деталей и общим габаритам.
Мы могли бы продолжить оптимизировать эту конструкцию, но решили, что параллельный захват проще в сборке и, следовательно, дешевле в производстве.
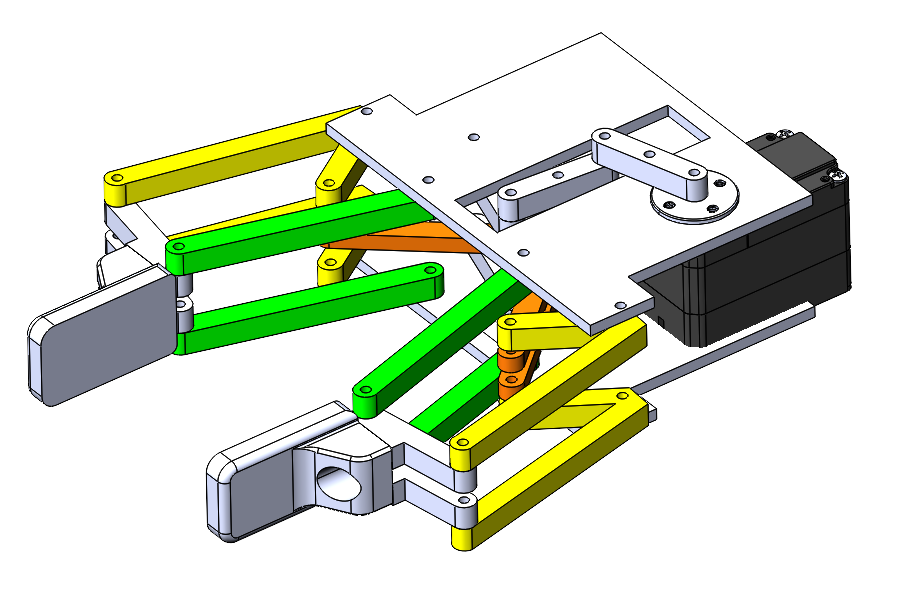
Кривошипно-коромысловый механизм
Кривошипно-коромысловый механизм
Следующим важным вопросом был выбор механизма перемещения. Первым вариантом, предложенным инженером, был кривошипно-коромысловый механизм. Существенный недостаток этой конструкции захвата — её высота. Если губки захвата короче высоты механизма перемещения, нижняя часть будет мешать поднимать объекты с плоских поверхностей, ограничивая захват особенно плоских предметов. Если сделать губки выше для компенсации, захват становится довольно громоздким.
Поэтому мы перешли к рассмотрению реечно-шестерёнчатого механизма захвата.
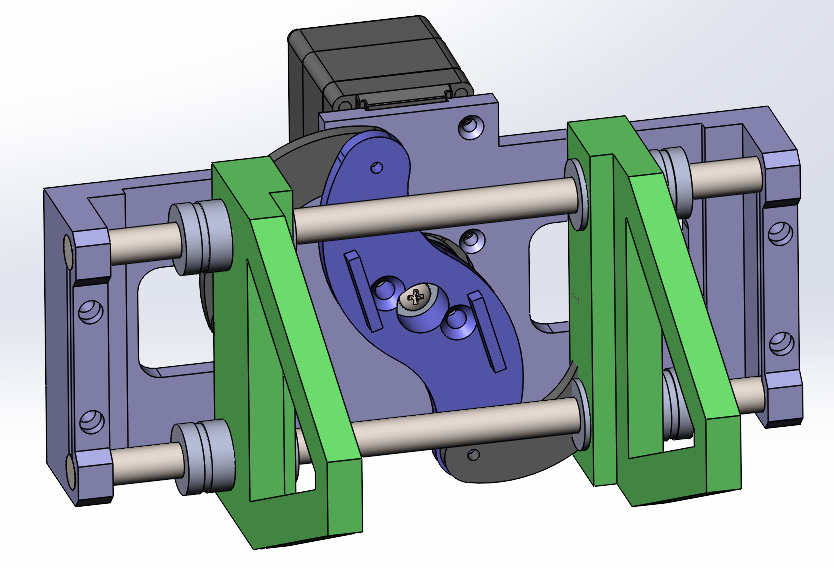
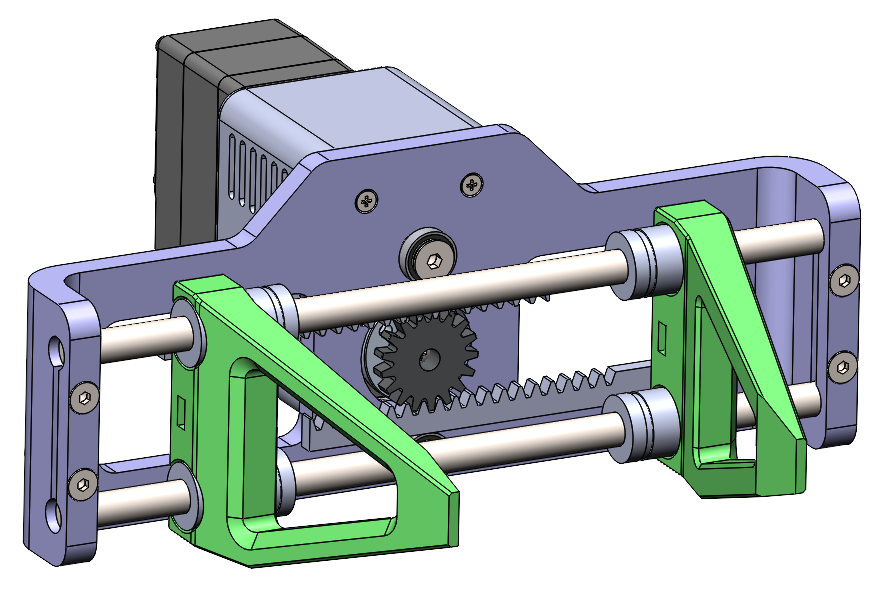
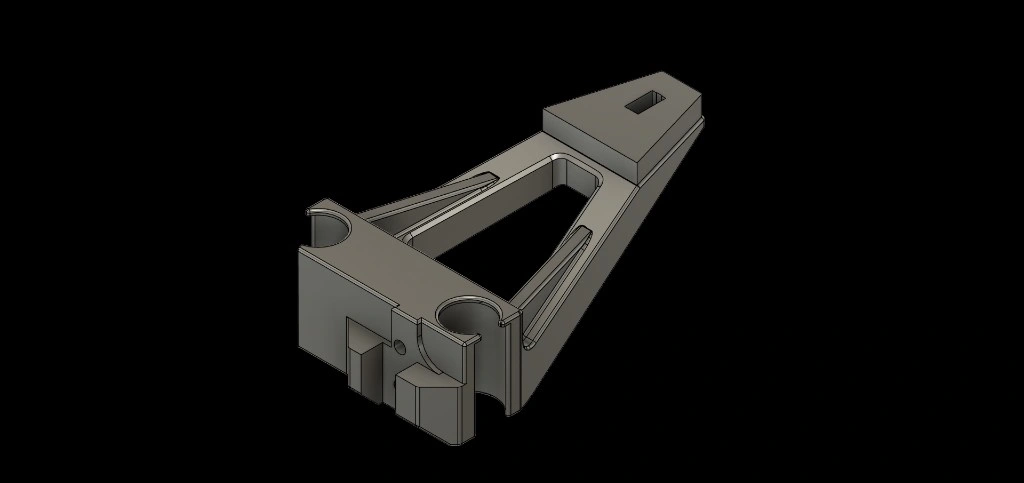
Реечно-шестерёнчатый механизм захвата
Реечно-шестерёнчатый механизм захвата. Версия 1
На этом изображении мы заменили коромысло реечным механизмом. Также видно, насколько больше свободного места появилось по сравнению с предыдущей версией.
На следующем этапе инженер добавил упоры и уменьшил высоту узла.
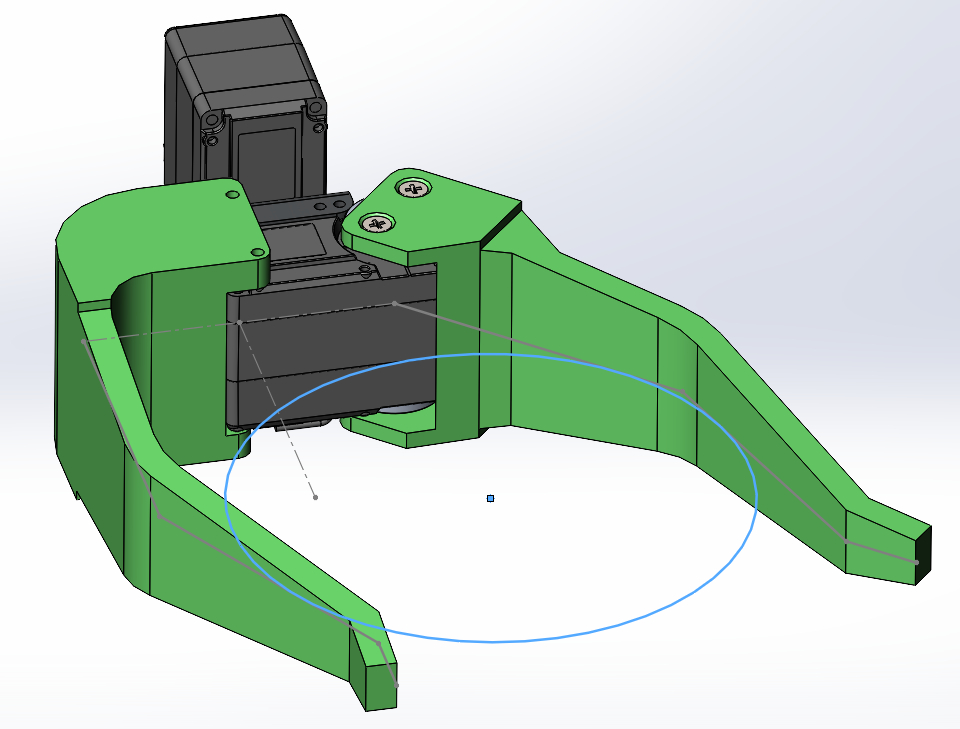
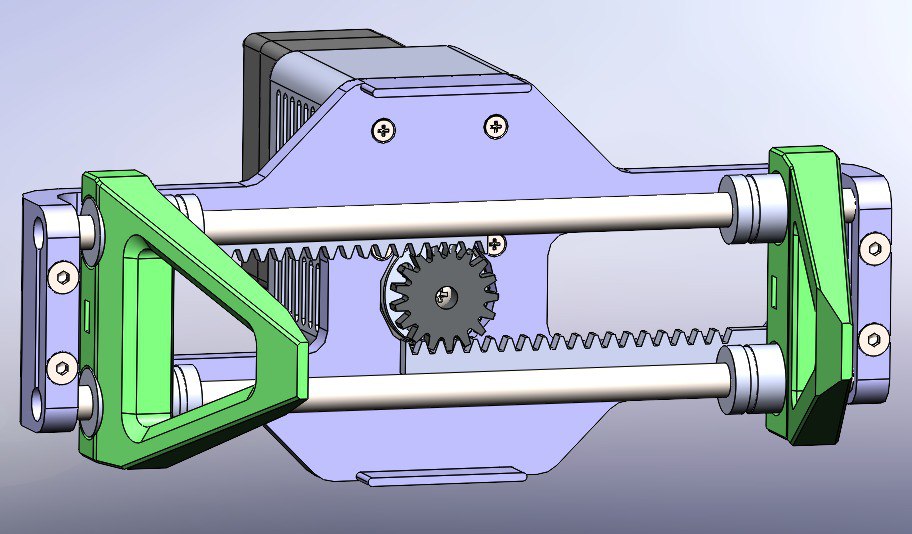
Реечно-шестерёнчатый механизм захвата. Версия 2
Один из оставшихся недостатков текущей конструкции — так называемые «уши»: когда руке нужно проникнуть в относительно узкие пространства, эти выступы могут существенно ограничивать манёвренность. Это также может стать проблемой при работе вблизи плоских поверхностей, если захвату нужно повернуться вокруг своей оси.
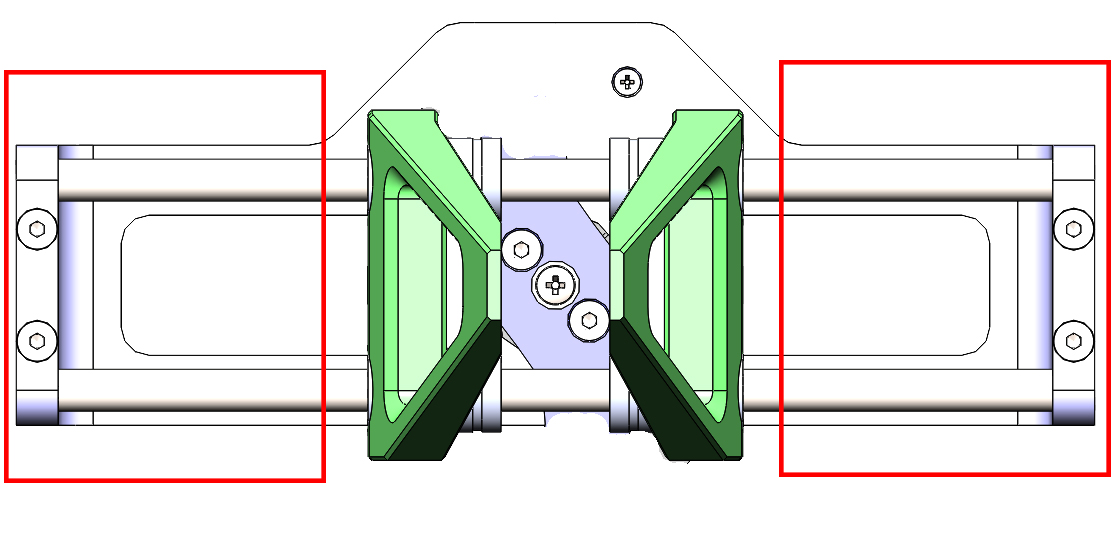
«Уши» захвата
Камера глубины
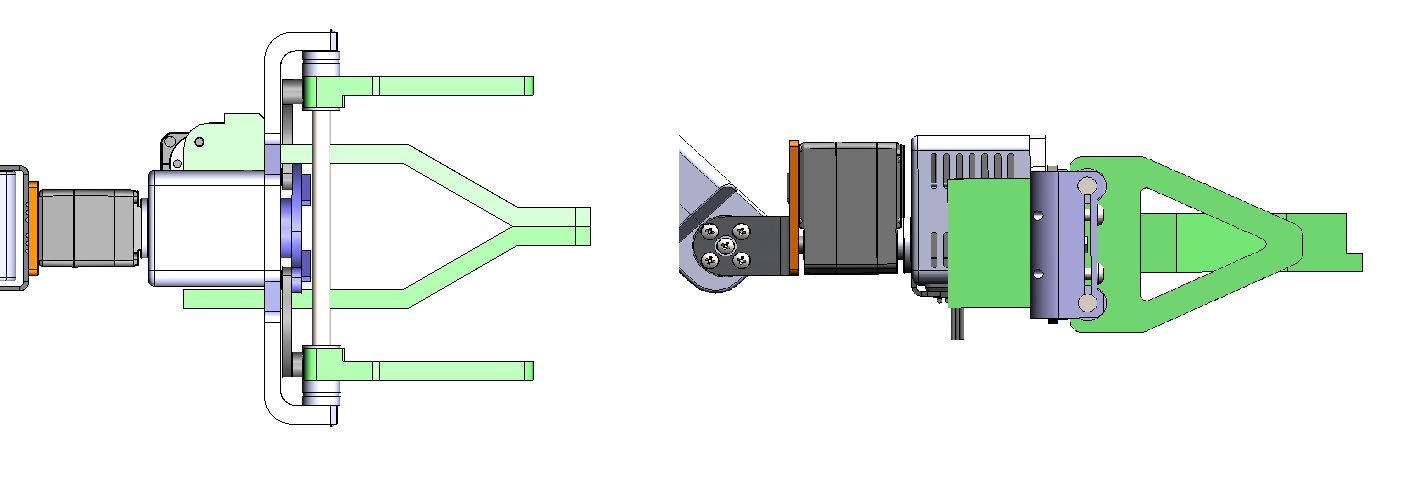
Захват используется в сочетании с камерой глубины, и на следующем этапе была добавлена монтажная пластина для её крепления.
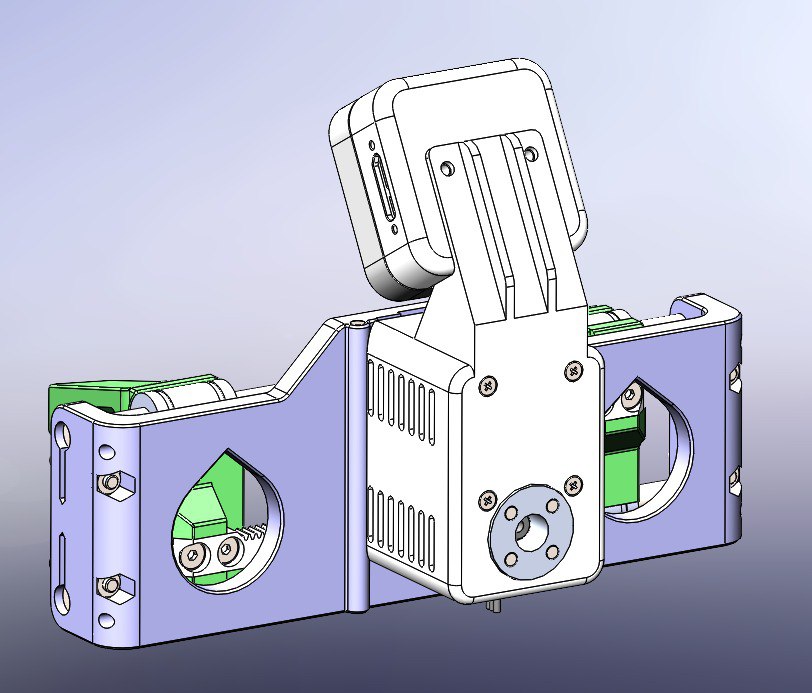
Крепление камеры глубины
Камера расположена под углом 45 градусов для максимально широкого рабочего поля зрения. Её использует модель управления на машинном обучении, чтобы точно определять размеры захватываемого объекта, необходимое усилие захвата и нужную ширину раскрытия губок. Это единственный датчик, установленный на захвате.
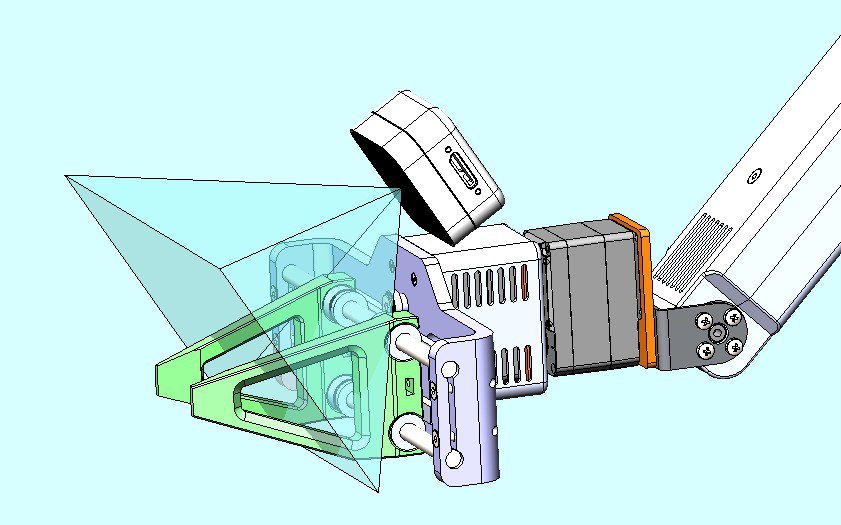
Угол обзора камеры глубины
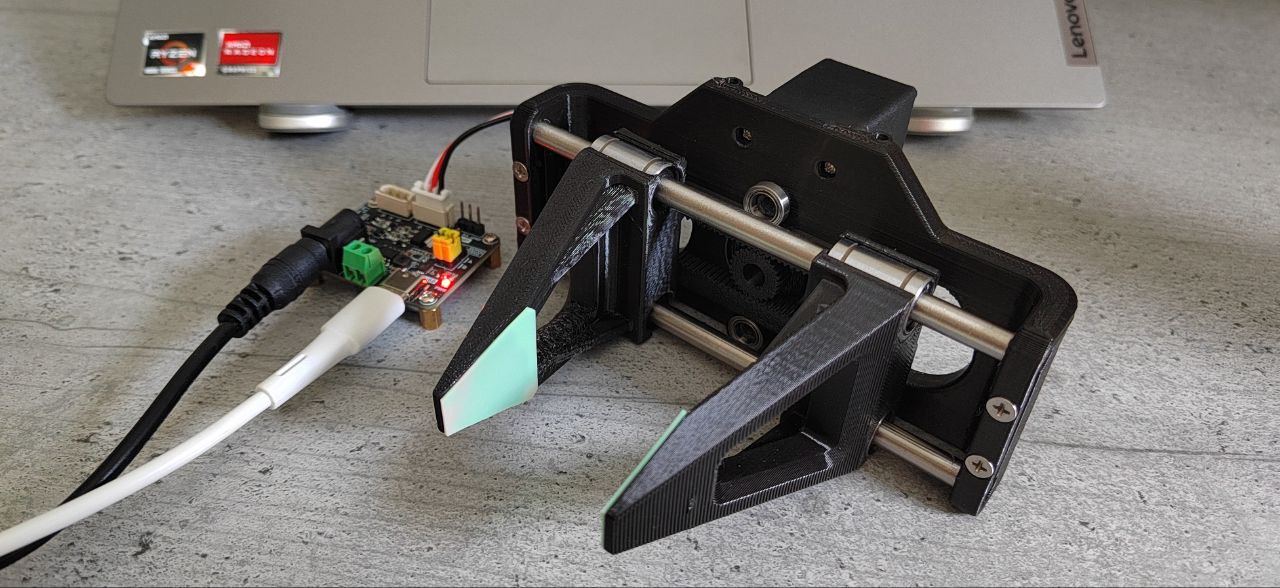
На этом этапе мы приостановили дальнейшую конструкторскую работу и перешли к сборке прототипа, чтобы выявить практические проблемы текущей конструкции. Часть компонентов была заказана на AliExpress.
Спецификация материалов
Электронные компоненты
| Позиция | Описание | Кол-во | Ссылка поставщика | Цена | Примечания |
| ST3215 Servo | Waveshare Servo Motor STS3215 | 1 | Amazon – Waveshare STS3215 Servo | $28.99 | Высокоточный шинный сервопривод с обратной связью |
| Bus Servo Adapter | Waveshare Bus Servo Adapter Board | 1 | Amazon – Bus Servo Adapter A | $10.99 | Интерфейс связи TTL/RS485 |
Механические компоненты
| Позиция | Описание | Кол-во | Ссылка поставщика | Цена | Примечания |
| MR106ZZ | Шарикоподшипник 10×6×3 мм | 2 | Amazon – ACROPIX MR106ZZ Bearings (10pcs) | $5.49 (10pcs) | Закрытый, предварительно смазанный |
| LM6UU | Линейный подшипник 6×12×19 мм | 4 | Amazon – uxcell LM6UU Bearings (4pcs) | $8.99 (4pcs) | Для плавного линейного движения |

Стальные направляющие и линейные подшипники
Rods
| Позиция | Описание | Кол-во | Ссылка поставщика | Цена | Примечания |
| Steel Rod | Стержень из нержавеющей стали 6 мм × 150 мм | 2 | Amazon – uxcell Stainless Steel Rod 6mm×150mm (5pcs) | $8.39 (5pcs) | Высокая точность, коррозионная стойкость |
3D-Printed Parts
| Part Number | Описание | Кол-во | Материал | Настройки печати |
| RB9.01.060.010 | Основная рама | 1 | PLA/PETG | 0.2mm layer, 20% infill |
| RB9.01.060.020 | Зажим | 2 | PLA/PETG | 0.2mm layer, 20% infill |
| RB9.01.060.030 | Зубчатая рейка | 2 | PLA/PETG | 0.15mm layer, 30% infill |
| RB9.01.060.040 | Ведущая шестерня | 1 | PLA/PETG | 0.15mm layer, 30% infill |
Примечания по 3D-печати
- Материал: PLA рекомендуется для прототипирования, PETG — для серийного использования
- Высота слоя: 0,15–0,2 мм для оптимального качества поверхности
- Заполнение: для шестерён рекомендуется более высокое заполнение (30%) для прочности
- Поддержки: могут потребоваться в зависимости от ориентации при печати
- Постобработка: для посадок подшипников может потребоваться лёгкая шлифовка
Винты
| Позиция | Описание | Кол-во | Стандарт | Цена | Примечания |
| M3×10 | Винт с потайной головкой | 4 | Amazon – M3×10 Винт с потайной головкойs | $6.39 (100pcs) | Для крепления зубчатой рейки |
| M3×20 | Винт с потайной головкой | 4 | Amazon – M3×20 Винт с потайной головкойs | $6.99 (100pcs) | Для крепления зажима к стержню |
| M4×8 | Винт с потайной головкой | 2 | Amazon – M4×8 Винт с потайной головкойs | $9.99 (100pcs) | Для фиксации подшипника основной рамы |
Гайки
| Позиция | Описание | Кол-во | Стандарт | Цена | Примечания |
| M3 | Шестигранная гайка | 4 | Amazon – M3 Шестигранная гайкаs | $5.99 (100pcs) | Для сборки зажима |
Крепёж сервопривода
| Позиция | Описание | Кол-во | Источник | Цена | Примечания |
| Саморезы | Винты крепления сервопривода | 4 | Комплект сервопривода | В комплекте | Входит в комплект STS3215 |
| Диск сервопривода | Адаптер выходного вала | 1 | Комплект сервопривода | В комплекте | Входит в комплект STS3215 |
| Крепёжный винт | Винт фиксации диска | 1 | Комплект сервопривода | В комплекте | Входит в комплект STS3215 |
Оценка стоимости
| Category | Оценочная стоимость (USD) |
| Электронные компоненты | $39.98 |
| Механические компоненты | $22.87 |
| Материалы для 3D-печати | $5-10 |
| Крепёж | $1.60 (approximate) |
| Итого | $69.45-74.45 |
Стоимость рассчитана по ценам Amazon на текущую дату — 6 июня 2025 года. Оптовые партии дают значительную экономию на крепеже.
Сборка
Сборка guide:
https://github.com/roboninecom/3D-Printed-Parallel-Gripper-for-Robotics-Arms/blob/main/docs/assembly-guide.md
При сборке первой версии возникла проблема с печатью одной из губок захвата, поэтому первый тест проводился только с одной губкой.
Через несколько дней пришла вторая губка, и мы смогли провести полное тестирование.
Инженер добавил силиконовые накладки для лучшего сцепления с объектами. Эта же первая версия опубликована как открытый исходный код на нашем GitHub:
https://github.com/roboninecom/3D-Printed-Parallel-Gripper-for-Robotics-Arms
Отзывы сообщества
Hadassah Freedman:
«Мне было интересно, рассматривали ли вы, как конструкция справляется с большими нагрузками, особенно у основания зубчатой рейки и осей губок. Возможно, добавление скруглений в этих местах помогло бы снизить концентрацию напряжений и избежать расслаивания FDM-печати, что позволило бы конструкции дольше и чаще нести более тяжёлые грузы. Я вижу, что у основания зубчатой рейки приличная толщина, но нет явных скруглений на переходе к вертикальным зубьям, что может быть концентратором напряжений; у осей губок также не видно скруглений, сглаживающих пути нагрузки от осевых штифтов в боковые стенки. Было бы любопытно узнать больше о её возможностях.»
Joy Kariya:
«Я просмотрел репозиторий, и у меня есть предложение: почему бы не встроить концевые выключатели с обеих сторон захвата, чтобы вместо временной задержки он отключался, когда объект захвачен. Тогда он сможет захватывать и мелкие объекты.»
Захват со встроенными концевыми выключателями
красиво напечатано, аккуратная модель
ну такое, петли быстро разбиваются
вот ЗАХВАТ по силе у меня подвёл, мотора не хватает
ребят спасибо огромное за то что выложили исходники и step файлы а не только картинки, я задолбался искать открытые захваты где можно реально влезть в геометрию и поправить под свою руку, тут всё параметризировано и это бесценно, перенёс под свой привод за пару часов, единственное в документации не хватает таблицы моментов затяжки винтов чтобы пластик не лопался при сборке, я сначала перетянул и треснул один палец, потом приноровился, в остальном идеально и буду советовать всем знакомым кто только начинает
норм гайд, добавлю что если поставить накладки из термоусадки на губки то держит мелочь типа винтиков гораздо лучше чем голый пластик, дёшево и сердито
честно говоря собрал за вечер всё по инструкции и заработало с первого раза что бывает редко, единственное винты в комплекте спеки коротковаты пришлось искать длиннее на пару мм, в остальном супер
подшипники в шарнирах ставите или пластик по пластику? от этого же люфт зависит
В нагруженных шарнирах стоят миниатюрные подшипники, в остальных — латунные втулки. Пластик по пластику мы не оставляли нигде, он быстро вырабатывается и даёт люфт.
Теперь всё ясно, спасибо.
огонь проект, давно такого ждал
кмк отличный старт для тех кто только входит в тему, я по этому проекту первый раз собрал что-то движущееся и оно реально хватает предметы, дочка в восторге, спасибо за подробные фотки сборки очень помогли
стильно выглядит, прям заводская деталь а не самоделка)
печатал такой, держит норм.
из чего печатать посоветуете, PLA треснет же под нагрузкой?
Для прототипа PLA приемлем, но для рабочего захвата мы советуем PETG или нейлон. PLA действительно становится хрупким и плывёт от нагрева привода.
То что нужно, благодарю.
а есть обратная связь по усилию или хват вслепую до упора?
В базовой версии хват идёт по току привода как косвенному датчику усилия. Для точного контроля силы можно добавить тензодатчик в губку, в репозитории есть ветка с примером.
Теперь всё ясно, спасибо.
печать заняла часов восемь на всё, ушло прилично пластика, но результат стоит того, жёсткость рамки приятно удивила, пальцы правда пришлось перепечатать с заполнением побольше
а параллельный захват или угловой? для мелких деталей какой лучше брать?
Для мелких и плоских деталей мы рекомендуем параллельный — он держит контакт по всей грани. Угловой проще механически, но на тонких предметах хуже центрирует.
То что нужно, благодарю.
имхо главная боль таких захватов это шарниры, на 3д печати они всегда слабое звено, у меня после сотни хватов начало хрустеть, думаю переходить на покупные оси с подшипниками а не печатные
собирал, но переделал кинематику под себя, в оригинале ход губок маловат для моих деталей, в общем-то модель открытая так что грех жаловаться, допилил и доволен спасибо
в общем поигрался с этим захватом на своём манипуляторе и вот что скажу, механически всё продумано грамотно, но я бы добавил в проект вариант с компенсацией перекоса губок, потому что при хвате несимметричных предметов одна губка приходит раньше и деталь уезжает, я решил это плавающим подвесом одной из губок на маленькой пружине и стало захватывать криво лежащие предметы гораздо увереннее, может возьмёте идею в основную ветку
какой сервой приводите, хватает ли момента на жёсткий хват?
Привод — серийная шинная серво STS3215 через рычажную передачу с понижением около 2:1. Этого хватает для уверенного удержания предметов до примерно 500 грамм.
То что нужно, благодарю.
каким соплом печатали пальцы? на 0.4 слои расслаиваются по линии нагрузки
Пальцы печатаем соплом 0.6 мм и ориентируем модель так, чтобы слои шли поперёк изгиба, а не вдоль. Это сильно повышает прочность на отрыв.
То что нужно, благодарю.
Хочу подробно описать свой опыт, вдруг кому пригодится. Печатал на FDM из PETG, заполнение 40% для пальцев и 25% для корпуса, сопло 0.6. Главная проблема была в передаче усилия: рычаг в стоковом варианте даёт слишком большой ход при слабом хвате на концах, я пересчитал плечи и сместил точку крепления тяги ближе к оси, после чего сила хвата выросла заметно при чуть меньшем раскрытии, что для моих задач оказалось как раз. Также добавил концевик, чтобы привод не упирался в механический стоп и не грелся впустую. В итоге очень доволен, проект отличная база для доработок.
мне кажется зря отказались от металлических вставок в губки, на чистом пластике контактная поверхность быстро затирается и хват начинает проскальзывать, я бы заложил посадочные места под сменные пластины
А чем приклеивали накладки на губки? у меня резина отваливается всё время
Мы используем тонкий слой цианоакрилата с активатором плюс механический паз типа ласточкин хвост в самой губке. Чисто на клее резина действительно долго не держится.
пальцы хлипкие вышли, буду толстить стенки
собрал две версии этого захвата, первую из PLA для проверки геометрии и вторую уже из нейлона как рабочую, и разница в надёжности колоссальная, PLA трескается по шарнирам буквально через неделю активной работы а нейлон держит и не пухнет от нагрева серво что для меня было критично потому что привод стоит вплотную к корпусу и греется, так что всем советую не лениться и сразу печатать боевую версию из нормального пластика а не как я тратить время на промежуточный вариант