Bau eines Open-Source-Arms. Der Greifer
 12758
12758
Ich möchte einige Details dazu teilen, wie die Entwicklung unseres erschwinglichen Manipulators voranschreitet. Aktuell bereiten wir uns intensiv auf die Montagephase des ersten Prototyps des Roboterarms vor.
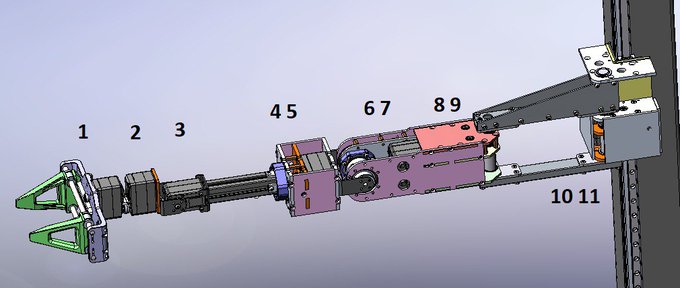
Roboterarm mit 7 Freiheitsgraden
Wir haben uns ein recht ehrgeiziges Ziel gesetzt: Spezifikationen zu erreichen, die mit führenden Forschungsmanipulatoren vergleichbar sind — 650 mm Länge, 7 Freiheitsgrade, bis zu 3 kg Traglast und eine Positioniergenauigkeit innerhalb von 1 mm. Alle Quelldateien und Entwicklungen werden öffentlich zugänglich gemacht — oder fast alle, je nach Umfang der Unterstützung, die wir von der Robotik-Community erhalten.
Was ist ein Greifer
Das Erste, was wir teilen möchten, ist der Greifer.
Beschreibung: Ein Greifer ist ein mechanisches oder robotisches Gerät, das zum Greifen, Halten, Manipulieren oder Transportieren von Objekten dient. Er fungiert als „Hand“ bzw. Endeffektor eines Roboterarms oder Automatisierungssystems und ermöglicht es dem Roboter, durch Greifen und Loslassen mit der physischen Welt zu interagieren.
Der Greifer ist als Open Source auf GitHub verfügbar.
Wir haben viele Konstruktionsvarianten für den Greifer geprüft und uns letztlich für einen Mechanismus mit parallelen Backen entschieden. Die Kriterien, nach denen wir die Konstruktion auswählten, waren:
- Einfachheit der Konstruktion
- Fähigkeit, runde Objekte zu greifen
- Fähigkeit, flache Objekte von einer Tischplatte aufzunehmen
- Minimaler Einsatz von Servos
- Kosten und Zuverlässigkeit der Konstruktion
Greifer mit einer drehbaren Backe
Eine der wohl einfachsten Greiferkonstruktionen, auf die wir gestoßen sind — der Greifer mit einer drehbaren Backe —, ist eine Anordnung, bei der eine Backe feststeht und die andere direkt auf der Welle eines Servomotors montiert ist.
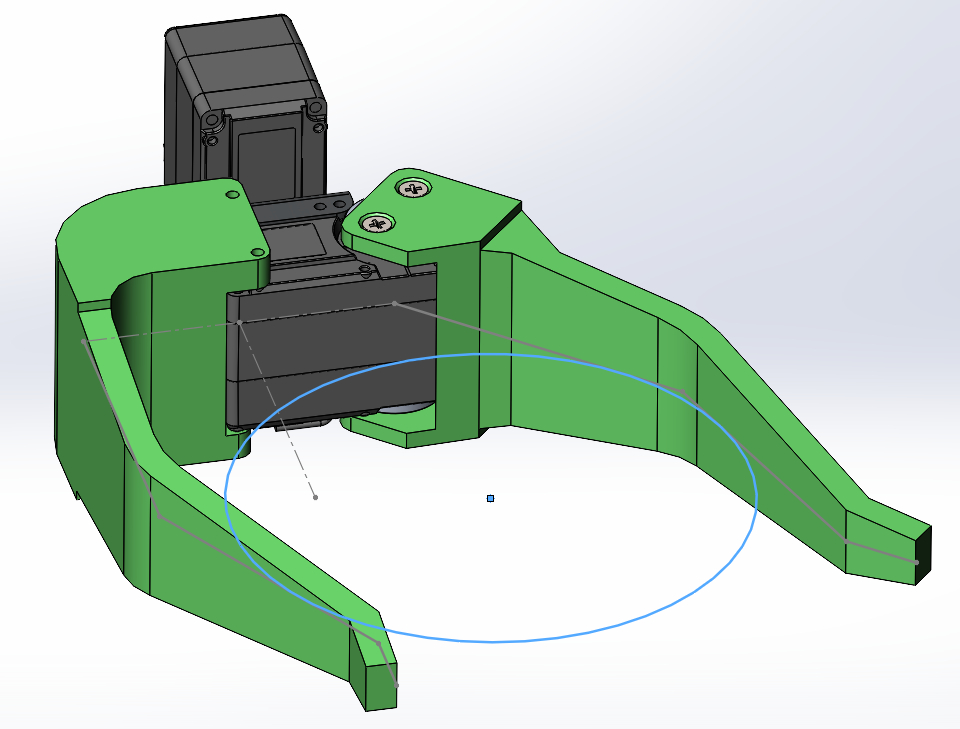
Greifer mit einer drehbaren Backe (3D-Ansicht)
- Der Nachteil dieser Lösung besteht darin, dass die Vorderkante der beweglichen Backe einer Kreisbahn folgt. Wenn wir also ein kleines Objekt mit den Spitzen des Greifers fassen wollen, müssen wir berücksichtigen, dass das Objekt beim Schließen entlang dieser Bogenbahn positioniert sein muss.
- Ein zweiter Nachteil ist, dass — da sich nur eine Backe bewegt — die maximale Breite des greifbaren Objekts durch den Verfahrweg dieser einzelnen beweglichen Backe begrenzt wird. Um dasselbe Volumen wie ein Parallelgreifer zu fassen, müssen die Backen deutlich länger sein.
Vergleich der Backenlänge. Greifer mit einer drehbaren Backe gegenüber Parallelgreifer
- Der dritte Nachteil ist, dass diese Art von Greifer asymmetrisch ist, das heißt, der Schwerpunkt ist stets zur beweglichen Seite verschoben.
Unter Berücksichtigung all dieser Nachteile des Greifers mit einer drehbaren Backe haben wir uns entschieden, stattdessen symmetrische Parallelgreifer-Konstruktionen zu untersuchen.
Parallelgreifer mit Viergelenk gegenüber gewöhnlichem Parallelgreifer
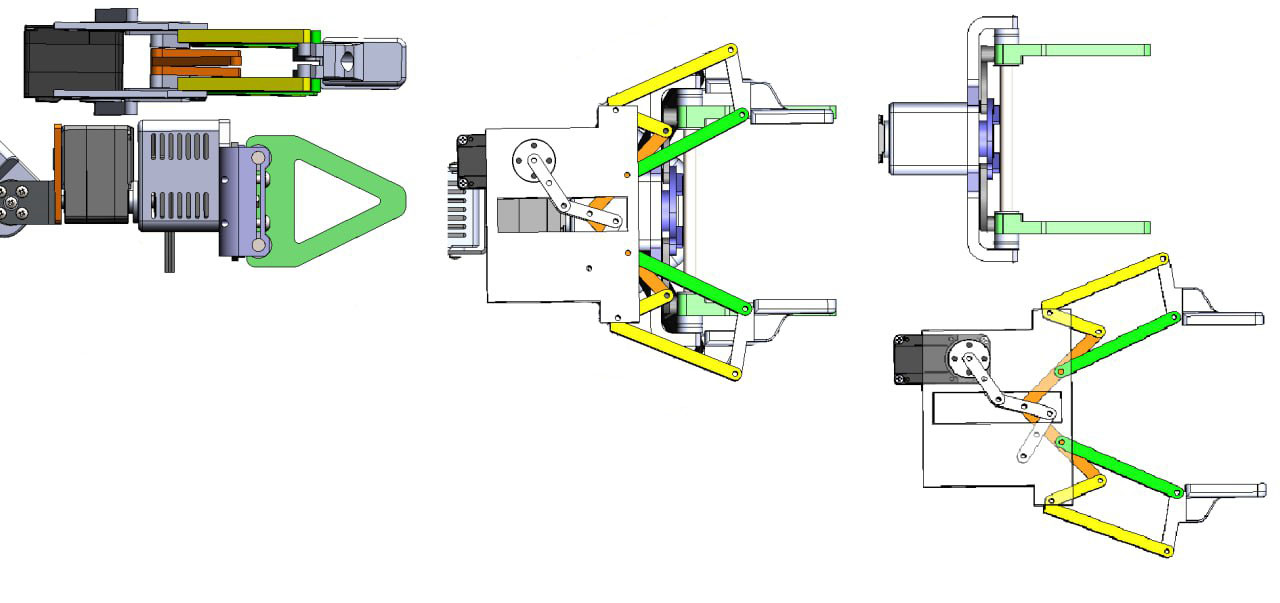
Parallelgreifer mit Viergelenk gegenüber gewöhnlichem Parallelgreifer
Das Bild oben zeigt zwei Varianten eines Greifers mit parallelen Backen, die einen einzigen Servomotor nutzen. Der Parallelgreifer mit Viergelenk, bei dem sich die Backen unter einem Winkel öffnen, erweist sich hinsichtlich der Anzahl der Teile und der Gesamtgröße als deutlich komplexer.
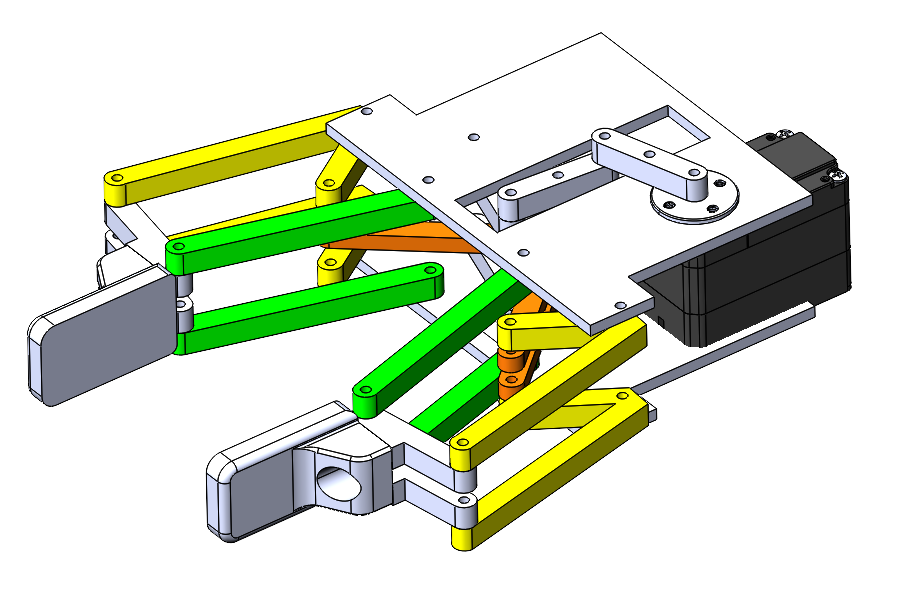
Wir hätten diese Konstruktion weiter optimieren können, entschieden aber, dass ein Parallelgreifer einfacher zu montieren und daher auch günstiger zu fertigen ist.
Kurbelschwingen-Mechanismus
Kurbelschwingen-Mechanismus
Die nächste wichtige Frage war die Wahl des Verschiebemechanismus. Die erste vom Ingenieur vorgeschlagene Variante war der Kurbelschwingen-Mechanismus. Ein erheblicher Nachteil dieser Greiferkonstruktion ist ihre Bauhöhe. Sind die Greiferbacken kürzer als die Höhe des Verschiebemechanismus, behindert der untere Teil das Aufnehmen von Objekten von flachen Oberflächen und schränkt das Greifen besonders flacher Gegenstände ein. Machen wir die Backen zum Ausgleich höher, wird der Greifer ziemlich sperrig.
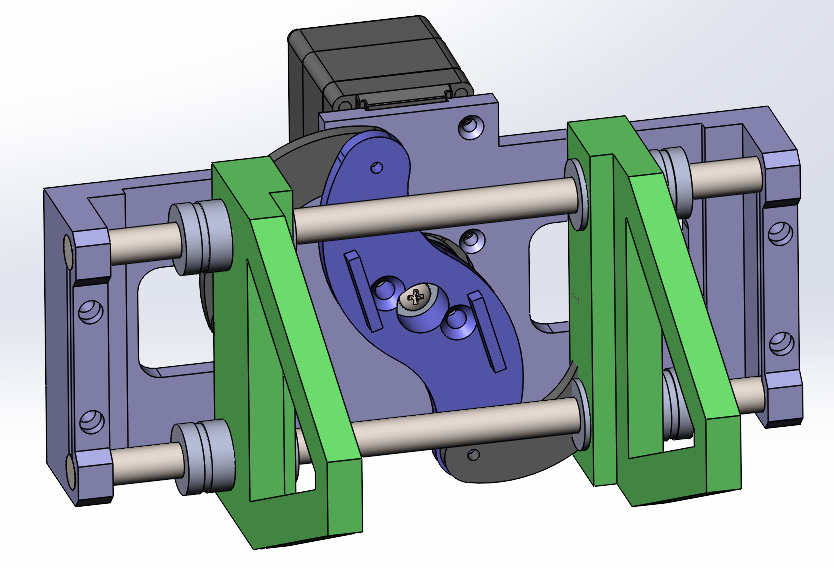
Deshalb gingen wir dazu über, den Zahnstangen-Ritzel-Mechanismus des Greifers zu betrachten.
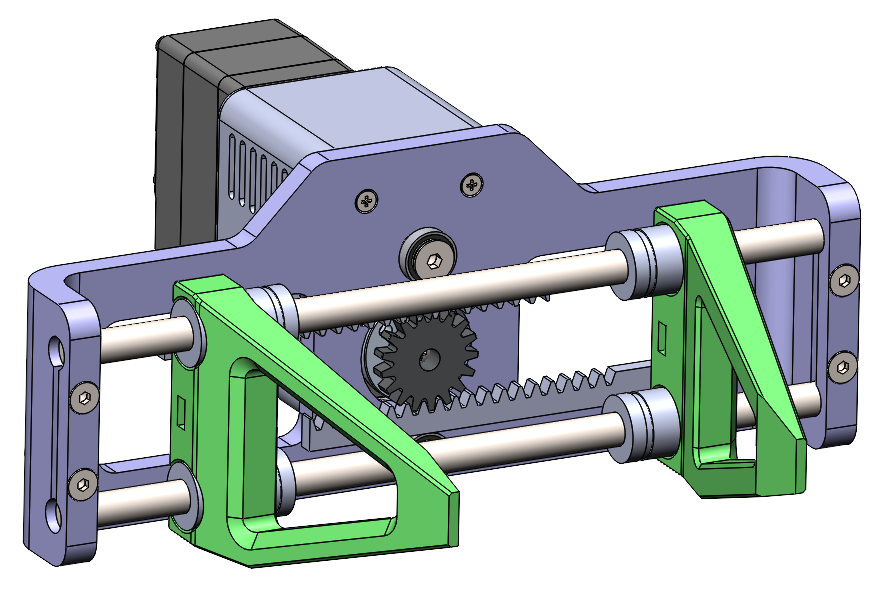
Zahnstangen-Ritzel-Mechanismus des Greifers
Zahnstangen-Ritzel-Mechanismus des Greifers. Version 1
Auf diesem Bild haben wir die Schwinge durch einen Zahnstangenmechanismus ersetzt. Man sieht auch, wie viel mehr freier Raum im Vergleich zur vorherigen Version gewonnen wurde.
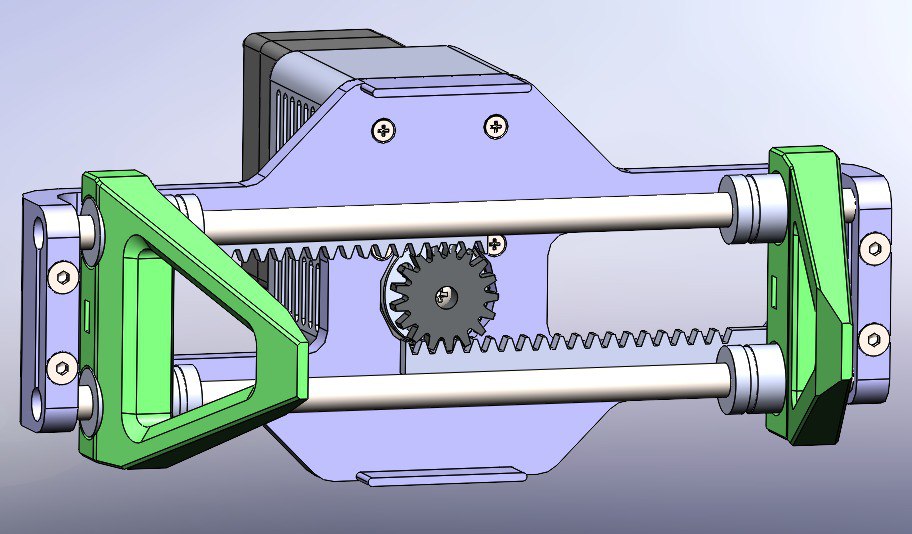
Im nächsten Schritt fügte der Ingenieur Anschläge hinzu und verringerte die Höhe der Baugruppe.
Zahnstangen-Ritzel-Mechanismus des Greifers. Version 2
Einer der verbleibenden Nachteile der aktuellen Konstruktion sind die sogenannten „Ohren“: Wenn der Arm in relativ enge Räume hineinreichen muss, können diese Fortsätze die Manövrierfähigkeit erheblich einschränken. Das kann auch beim Arbeiten in der Nähe flacher Oberflächen zum Problem werden, wenn sich der Greifer um seine Achse drehen muss.
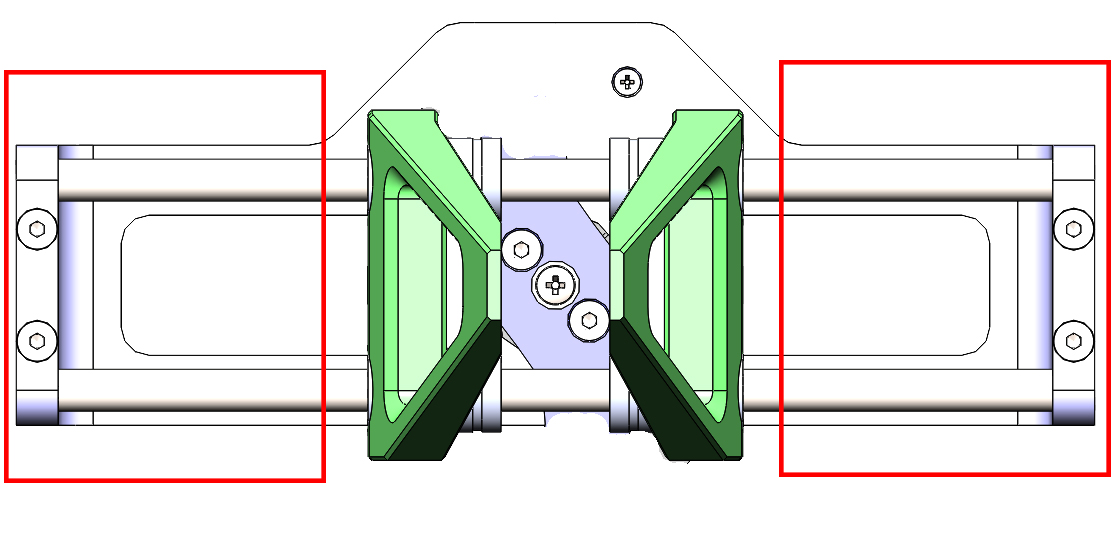
Die „Ohren“ des Greifers
Tiefenkamera
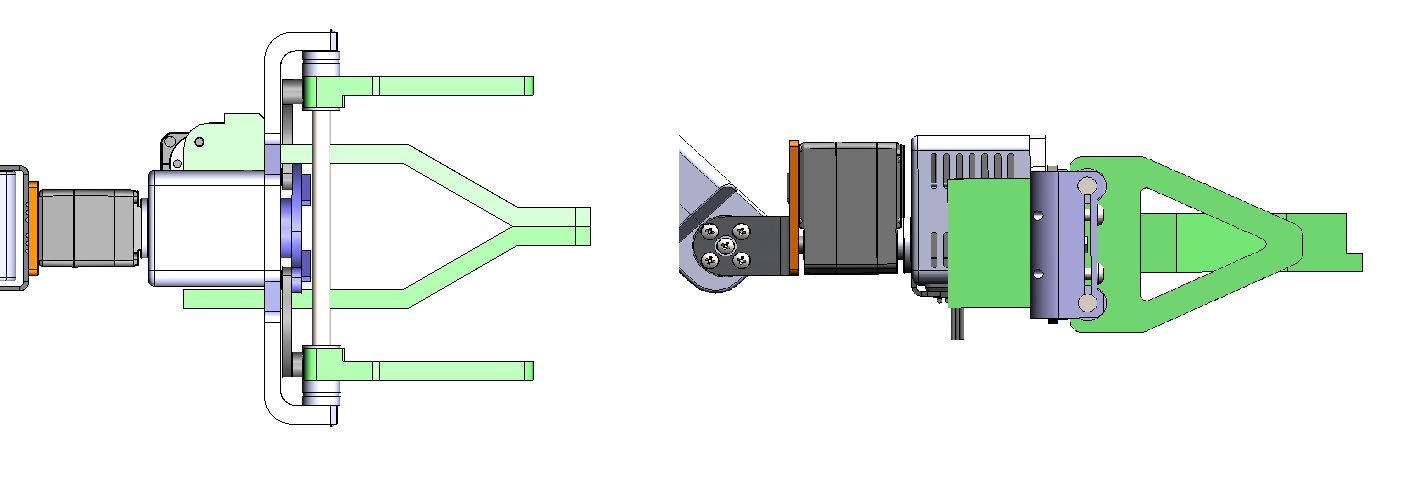
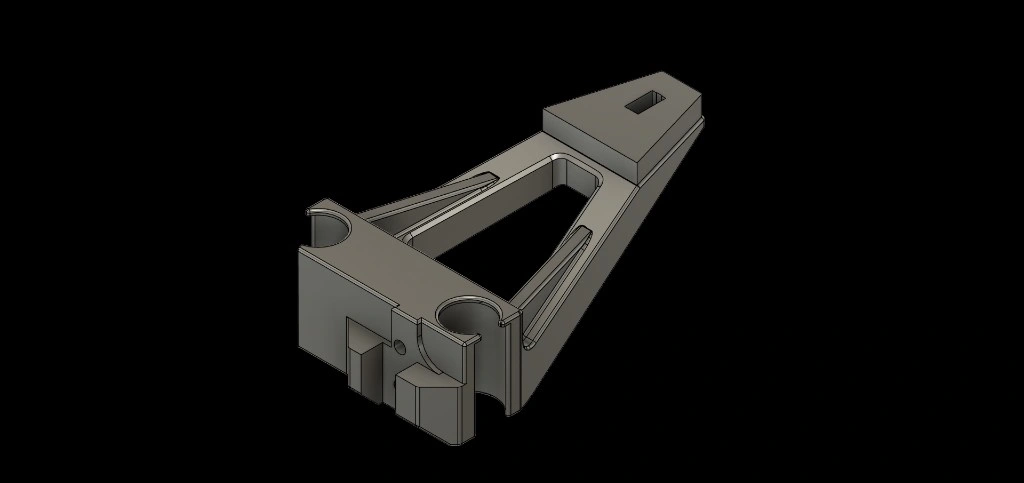
Der Greifer wird in Kombination mit einer Tiefenkamera eingesetzt, und im nächsten Schritt wurde eine Montageplatte zur Befestigung der Kamera hinzugefügt.
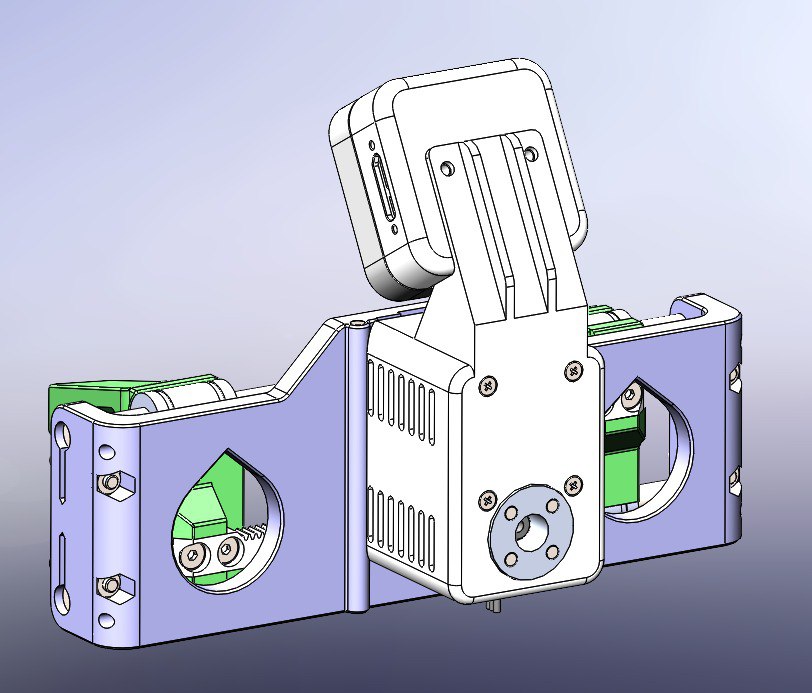
Halterung der Tiefenkamera
Die Kamera ist in einem Winkel von 45 Grad angeordnet, um das größtmögliche Arbeitssichtfeld zu erreichen. Sie wird von einem auf maschinellem Lernen basierenden Steuerungsmodell genutzt, um die Abmessungen des zu greifenden Objekts, die erforderliche Greifkraft und die nötige Backenöffnung genau zu bestimmen. Sie ist der einzige am Greifer installierte Sensor.
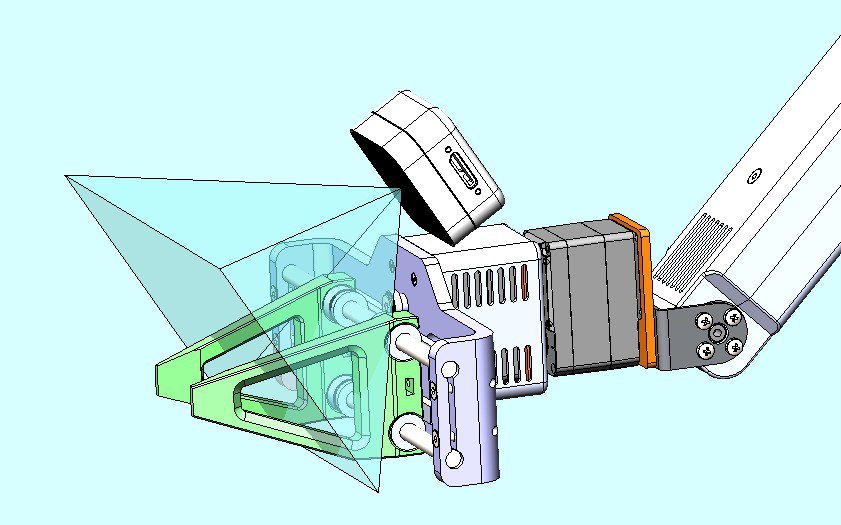
Blickwinkel der Tiefenkamera
An diesem Punkt haben wir die weitere Konstruktionsarbeit pausiert und sind zur Montage des Prototyps übergegangen, um praktische Probleme der aktuellen Konstruktion zu erkennen. Ein Teil der Komponenten wurde bei AliExpress bestellt.
Stückliste
Elektronische Komponenten
| Position | Beschreibung | Menge | Lieferantenlink | Preis | Anmerkungen |
| ST3215 Servo | Waveshare Servo Motor STS3215 | 1 | Amazon – Waveshare STS3215 Servo | $28.99 | Hochpräziser Bus-Servo mit Rückmeldung |
| Bus Servo Adapter | Waveshare Bus Servo Adapter Board | 1 | Amazon – Bus Servo Adapter A | $10.99 | Kommunikationsschnittstelle TTL/RS485 |
Mechanische Komponenten
| Position | Beschreibung | Menge | Lieferantenlink | Preis | Anmerkungen |
| MR106ZZ | Kugellager 10×6×3 mm | 2 | Amazon – ACROPIX MR106ZZ Bearings (10pcs) | $5.49 (10pcs) | Gekapselt, vorgeschmiert |
| LM6UU | Linearlager 6×12×19 mm | 4 | Amazon – uxcell LM6UU Bearings (4pcs) | $8.99 (4pcs) | Für gleichmäßige Linearbewegung |

Stahlwellen und Linearlager
Rods
| Position | Beschreibung | Menge | Lieferantenlink | Preis | Anmerkungen |
| Steel Rod | Edelstahlstange 6 mm × 150 mm | 2 | Amazon – uxcell Stainless Steel Rod 6mm×150mm (5pcs) | $8.39 (5pcs) | Hohe Präzision, korrosionsbeständig |
3D-Printed Parts
| Part Number | Beschreibung | Menge | Material | Druckeinstellungen |
| RB9.01.060.010 | Hauptrahmen | 1 | PLA/PETG | 0.2mm layer, 20% infill |
| RB9.01.060.020 | Klemme | 2 | PLA/PETG | 0.2mm layer, 20% infill |
| RB9.01.060.030 | Zahnstange | 2 | PLA/PETG | 0.15mm layer, 30% infill |
| RB9.01.060.040 | Antriebszahnrad | 1 | PLA/PETG | 0.15mm layer, 30% infill |
Hinweise zum 3D-Druck
- Material: PLA für das Prototyping empfohlen, PETG für den Serieneinsatz
- Schichthöhe: 0,15–0,2 mm für optimale Oberflächengüte
- Füllung: Für Zahnräder wird eine höhere Füllung (30 %) empfohlen, um die Festigkeit zu gewährleisten
- Stützstrukturen: Können je nach Druckausrichtung erforderlich sein
- Nachbearbeitung: Für Lagersitze kann leichtes Schleifen erforderlich sein
Schrauben
| Position | Beschreibung | Menge | Norm | Preis | Anmerkungen |
| M3×10 | Senkkopfschraube | 4 | Amazon – M3×10 Senkkopfschraubes | $6.39 (100pcs) | Zur Befestigung der Zahnstange |
| M3×20 | Senkkopfschraube | 4 | Amazon – M3×20 Senkkopfschraubes | $6.99 (100pcs) | Zur Befestigung der Klemme an der Stange |
| M4×8 | Senkkopfschraube | 2 | Amazon – M4×8 Senkkopfschraubes | $9.99 (100pcs) | Zur Lagersicherung des Hauptrahmens |
Muttern
| Position | Beschreibung | Menge | Norm | Preis | Anmerkungen |
| M3 | Sechskantmutter | 4 | Amazon – M3 Sechskantmutters | $5.99 (100pcs) | Für die Klemmenmontage |
Servo-Befestigungsmaterial
| Position | Beschreibung | Menge | Quelle | Preis | Anmerkungen |
| Blechschrauben | Befestigungsschrauben für den Servo | 4 | Servo-Set | Im Lieferumfang | Im Lieferumfang des STS3215 |
| Servo-Scheibe | Abtriebswellen-Adapter | 1 | Servo-Set | Im Lieferumfang | Im Lieferumfang des STS3215 |
| Befestigungsschraube | Schraube zur Scheibensicherung | 1 | Servo-Set | Im Lieferumfang | Im Lieferumfang des STS3215 |
Kostenschätzung
| Category | Geschätzte Kosten (USD) |
| Elektronische Komponenten | $39.98 |
| Mechanische Komponenten | $22.87 |
| Materialien für den 3D-Druck | $5-10 |
| Befestigungselemente | $1.60 (approximate) |
| Gesamt | $69.45-74.45 |
Kosten basieren auf den Amazon-Preisen zum aktuellen Stand — 6. Juni 2025. Großmengen bieten erhebliche Einsparungen bei Befestigungselementen.
Montage
Montage guide:
https://github.com/roboninecom/3D-Printed-Parallel-Gripper-for-Robotics-Arms/blob/main/docs/assembly-guide.md
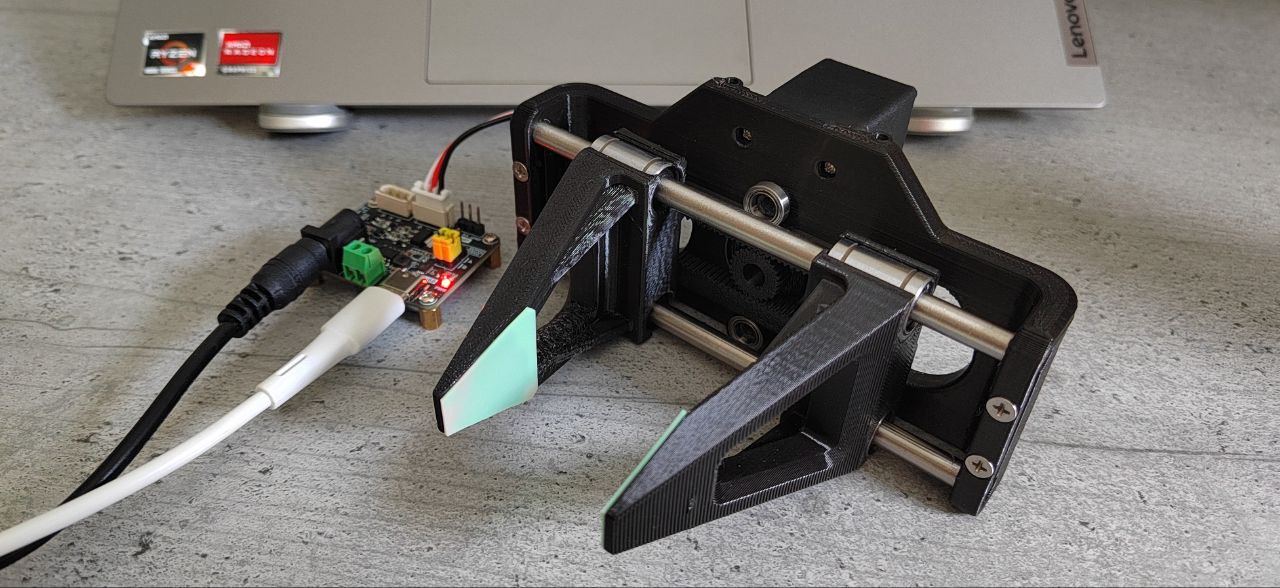
Bei der Montage der ersten Version gab es ein Problem beim Drucken einer der Greiferbacken, daher wurde der erste Test nur mit einer Backe durchgeführt.
Einige Tage später traf die zweite Backe ein, und wir konnten einen vollständigen Test durchführen.
Der Ingenieur fügte Silikonauflagen für besseren Halt an Objekten hinzu. Genau diese erste Version wurde als Open Source auf unserem GitHub veröffentlicht:
https://github.com/roboninecom/3D-Printed-Parallel-Gripper-for-Robotics-Arms
Rückmeldungen aus der Community
Hadassah Freedman:
„Mich würde interessieren, ob ihr bedacht habt, wie die Konstruktion mit höheren Lasten umgeht, insbesondere im Bereich des Zahnstangenfußes und der Backendrehpunkte. Möglicherweise würden Rundungen an diesen Stellen helfen, Spannungskonzentrationen zu verringern und ein Delaminieren bei FDM-Drucken zu vermeiden, sodass die Konstruktion über längere Zeiträume und häufiger schwerere Lasten tragen könnte. Ich sehe, dass der Zahnstangenfuß eine ordentliche Wandstärke hat, aber keine klaren Rundungen am Übergang zu den senkrechten Zahnflanken aufweist, was ein Spannungskonzentrator sein kann; auch an den Backendrehpunkten sind keine sichtbaren Rundungen vorhanden, die die Lastpfade von den Drehbolzen in die Seitenwände glätten würden. Ich wäre gespannt, mehr über die Leistungsfähigkeit zu erfahren.“
Joy Kariya:
„Ich habe das Repository durchgesehen und habe einen Vorschlag: Warum integriert ihr nicht auf beiden Seiten des Greifers Endschalter, sodass er statt einer Zeitverzögerung abschaltet, sobald das Objekt gegriffen wurde? So könnte er auch kleine Objekte fassen.“
Greifer mit integrierten Endschaltern
Sehr schöne Dokumentation. Ein Hinweis zu den empfohlenen Schrauben (Länge, Gewinde) wäre für Einsteiger noch hilfreich, sonst muss man das aus den Fotos ablesen.
Frage zur Aktuierung: reicht ein einzelner STS3215 für den Greifer oder braucht man mehr Drehmoment?
Ein einzelner STS3215 ist für diesen Greifer völlig ausreichend, wir nutzen ihn selbst so. Wer schwerere Objekte greifen will, kann die Hebelübersetzung anpassen, statt einen stärkeren Servo zu verbauen.
druckt ihr die zahnräder liegend oder stehend? bei stehend bricht mir das immer an der z-naht
Wir drucken die Zahnräder liegend mit der Verzahnung in der XY-Ebene, das vermeidet die schwache Z-Naht an den Zahnflanken. Eine Schichthöhe von 0,15 mm hat sich bewährt.
leichtgängig und stabil, genau die mischung die man bei greifern selten hinbekommt
gibts die step files irgendwo oder nur stl? würde gern die fingerlänge anpassen
Wir stellen die Quelldateien als STEP im Repository bereit, sodass ihr Parameter wie die Fingerlänge direkt im CAD anpassen könnt. Der Link steht am Ende des Artikels.
Verstanden, danke für die Antwort.
TPU pads waren bei mir der gamechanger, vorher ist alles weggerutscht
find den parallelmechanismus clever gelöst, vor allem das die finger über den ganzen weg parallel bleiben
die explosionszeichnung ist gold wert für den nachbau, danke dafür
Wirklich ein vorbildliches Open-Source-Projekt, klare Doku, saubere CAD-Daten, das macht den Nachbau zur Freude.
schickes teil!
parallelkinematik ftw. winkelgreifer nerven beim ausrichten total
Habe den Greifer leicht skaliert für größere Objekte und es funktioniert problemlos, lediglich die Zahnstange musste ich neu auslegen damit das Modul passt, ansonsten top.
hab das ganze wochenende gedruckt und gebaut, läuft jetzt einwandfrei. tolle anleitung!!
welches material nehmt ihr für die finger, PLA oder eher PETG?
Für die Finger empfehlen wir PETG, da es schlagzäher ist und sich bei Wärme weniger verzieht als PLA. Die Halterung selbst drucken wir ebenfalls in PETG.
Genau das brauchte ich.
Der Greifer sieht mechanisch echt durchdacht aus.
Mein einziger Kritikpunkt: die Zahnstange braucht recht enge Toleranzen, auf meinem Ender 3 musste ich erst die Extrusion kalibrieren bevor es leichtgängig lief — vielleicht ein Toleranz-Test-Stück mit ins Repo legen?
Wie viel Greifkraft erreicht der Aufbau ungefähr?
Eine kalibrierte Greifkraftmessung am Fingerende haben wir nicht durchgeführt, im praktischen Einsatz reicht die Kraft des empfohlenen STS3215 für typische Objekte aber problemlos aus. Über die Hebelübersetzung lässt sich die Greifkraft je nach Anwendung anpassen.
Vielen Dank für die Erklärung.
object-top fixierung mit den pads klappt erstaunlich gut bei runden teilen
Wirklich elegantes Design. Mich würde interessieren, wie ihr beim Zahnstangenantrieb das Spiel in den Griff bekommen habt, das ist ja sonst die typische Schwachstelle bei gedruckten Greifern.
wie habt ihr den endanschlag gelöst, mechanisch oder über strombegrenzung im servo?
Wir nutzen primär die Strombegrenzung des Servos als sanften Anschlag, ergänzt durch einen mechanischen Hartanschlag im geschlossenen Zustand zum Schutz des Getriebes.
saubere fasen an den fingern, das verhindert beim greifen das verkanten gut
Ich habe einen ähnlichen Greifer gebaut, allerdings mit Sehnenantrieb statt Zahnstange, und bin am Ende doch bei eurer Lösung gelandet weil die Sehnen sich mit der Zeit längen und die Greifkraft nachlässt, eurer Ansatz mit dem direkten Antrieb ist da deutlich wartungsärmer.
endlich ein greifer design das man auch ohne cnc nachbauen kann
Lässt sich der Greifer mit einem Kraftsensor nachrüsten, um die Greifkraft zu regeln?
Ja, der STS3215 liefert über den Bus einen Stromwert zurück, der sich als grober Kraftindikator nutzen lässt. Für präzise Regelung lässt sich am Finger zusätzlich ein Dehnungsmessstreifen anbringen.
Habt ihr die Fingerflächen aus TPU gedruckt oder einen separaten Gummibelag aufgeklebt? Auf den Fotos lässt sich das schwer erkennen.
Die Fingerflächen sind als separate TPU-Pads gedruckt und werden eingeclipst. So lassen sie sich bei Verschleiß einfach tauschen, ohne den ganzen Finger neu zu drucken.