オープンソースアームを作る。グリッパー
 12724
12724
私たちの手頃な価格のマニピュレーターの開発がどのように進んでいるか、いくつかの詳細を共有したいと思います。現在、私たちはロボットアームの最初のプロトタイプの組み立て段階に向けて積極的に準備を進めています。
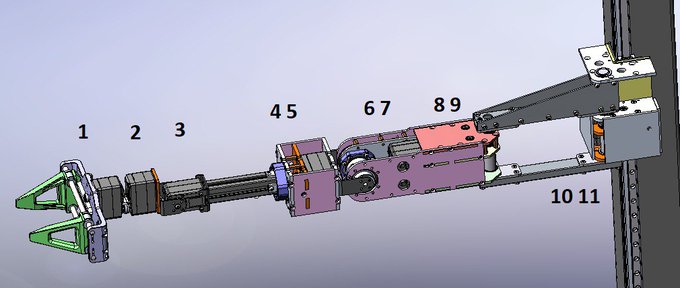
7自由度ロボットアーム
私たちはかなり野心的な目標を掲げています。それは、主要な研究用マニピュレーターに匹敵する仕様、すなわち長さ650 mm、7自由度、最大3 kgのペイロード容量、そして1 mm以内の位置決め精度を達成することです。すべてのソースファイルと開発成果は公開されます。あるいは、ロボティクスコミュニティから得られるサポートのレベルに応じて、そのほぼすべてが公開されます。
グリッパーとは
私たちが最初に共有する準備ができたのは、グリッパーです。
説明: グリッパーとは、物体をつかむ・保持する・操作する・運搬するために設計された機械的またはロボット的な装置です。ロボットアームや自動化システムの「手」、すなわちエンドエフェクタとして機能し、物体をつかんで離すことでロボットが物理世界と関わることを可能にします。
グリッパーはGitHub上でオープンソースとして公開されています。
私たちはグリッパーの多くの設計案を検討し、最終的に平行ジョー機構を選びました。設計を選ぶ際に用いた基準は次のとおりです。
- 構造のシンプルさ
- 丸い物体をつかむ能力
- 平らな物体をテーブルから持ち上げる能力
- サーボの使用を最小限に抑えること
- 設計のコストと信頼性
片側回転ジョー式グリッパー
おそらく私たちが出会った中で最もシンプルなグリッパー設計の一つである片側回転ジョー式グリッパーは、一方のジョーが固定され、もう一方がサーボモーターのシャフトに直接取り付けられている構成です。
- この解決策の欠点は、可動ジョーの前縁が円弧を描いて動くことです。そのため、グリッパーの先端で小さな物体をつかむ必要がある場合、閉じる際に物体がその円弧の軌道に沿って配置されていなければならないことを考慮する必要があります。
- 2つ目の欠点は、片方のジョーしか動かないため、つかめる物体の最大幅がその単一の可動ジョーの可動範囲によって制限されることです。平行グリッパーと同じ容積をつかむには、ジョーを大幅に長くする必要があります。
ジョーの長さの比較。片側回転ジョー式グリッパー対平行グリッパー
- 3つ目の欠点は、この種のグリッパーが非対称であること、つまり重心が常に可動側に偏っていることです。
片側回転ジョー式グリッパーのこれらの欠点をすべて考慮し、私たちは代わりに対称的な平行グリッパーの設計を検討することにしました。
四節リンク式平行グリッパー対通常の平行グリッパー
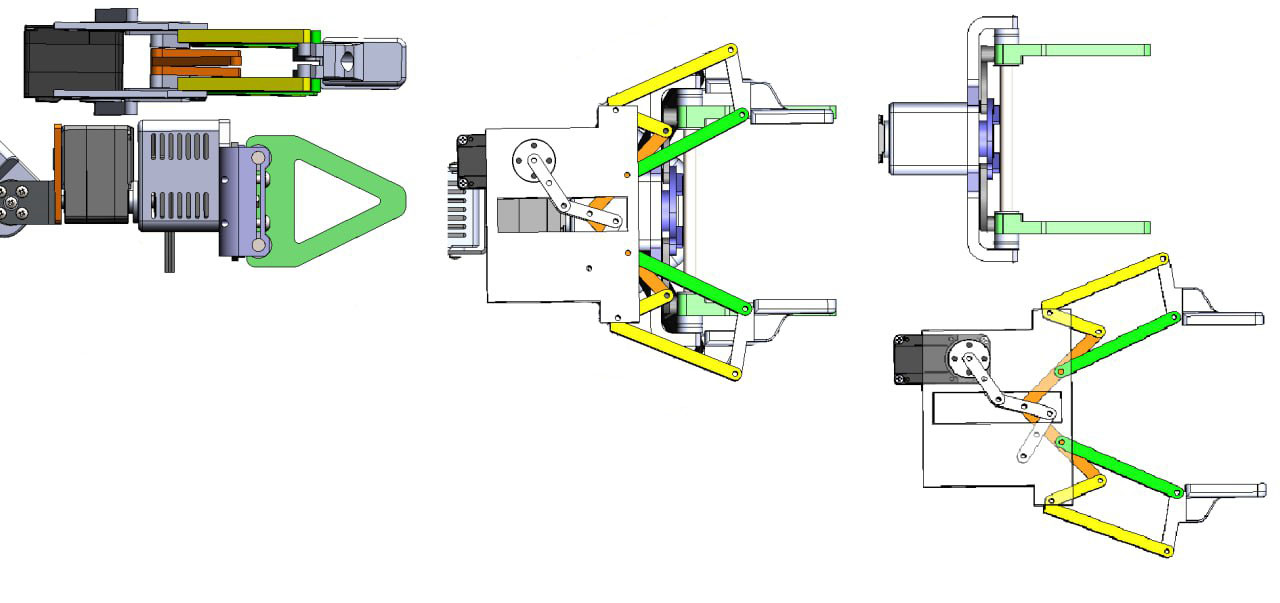
四節リンク式平行グリッパー対通常の平行グリッパー
上の画像は、単一のサーボモーターを使用した平行ジョー式グリッパーの2つのバージョンを示しています。ジョーが角度をつけて開く四節リンク式平行グリッパーは、部品点数や全体のサイズの点で明らかに複雑であることがわかります。
その設計を最適化し続けることもできましたが、平行グリッパーの方が組み立てが簡単で、したがって製造コストも安くなると判断しました。
クランク・ロッカー式リンク機構
クランク・ロッカー式リンク機構
次に重要な問題は、スライド機構の選択でした。エンジニアが最初に提案したのはクランク・ロッカー式リンク機構でした。このグリッパー設計の大きな欠点はその高さです。グリッパーのジョーがスライド機構の高さより短い場合、下部が平らな面からの物体の持ち上げを妨げ、特に平らな物体をつかむ能力を制限します。それを補うためにジョーを高くすると、グリッパーはかなりかさばってしまいます。
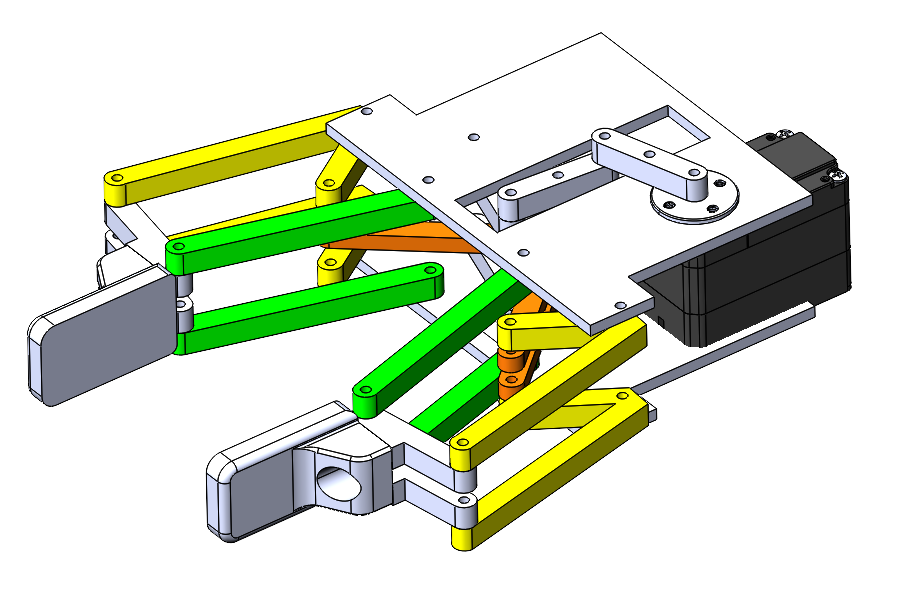
そのため、私たちはラック・アンド・ピニオン式グリッパー機構の検討へと移りました。
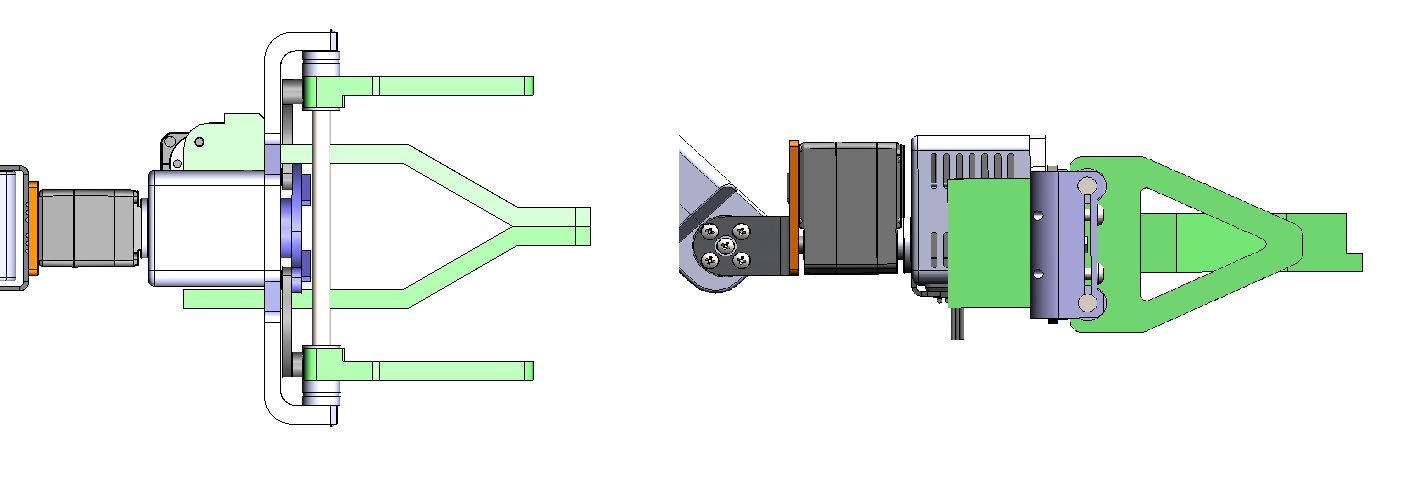
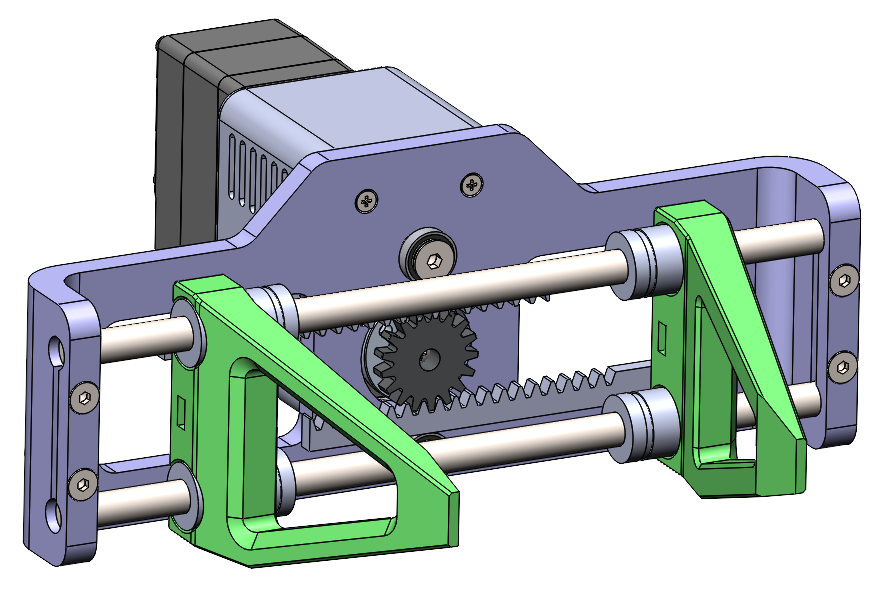
ラック・アンド・ピニオン式グリッパー機構
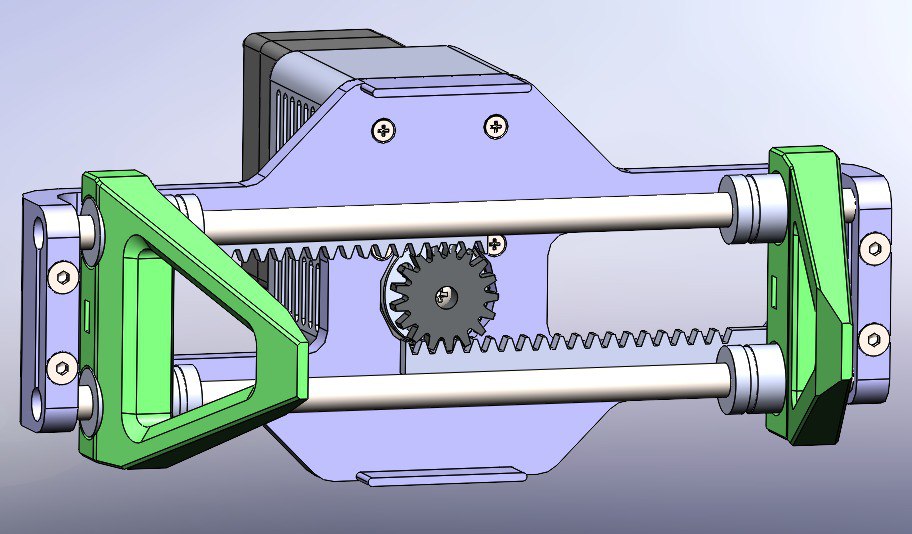
ラック・アンド・ピニオン式グリッパー機構。バージョン1
この画像では、ロッカーアームをラック機構に置き換えました。また、前のバージョンと比べてどれだけ多くの空きスペースが得られたかもわかります。
次の段階で、エンジニアはストッパーを追加し、組み立て品の高さを低くしました。
ラック・アンド・ピニオン式グリッパー機構。バージョン2
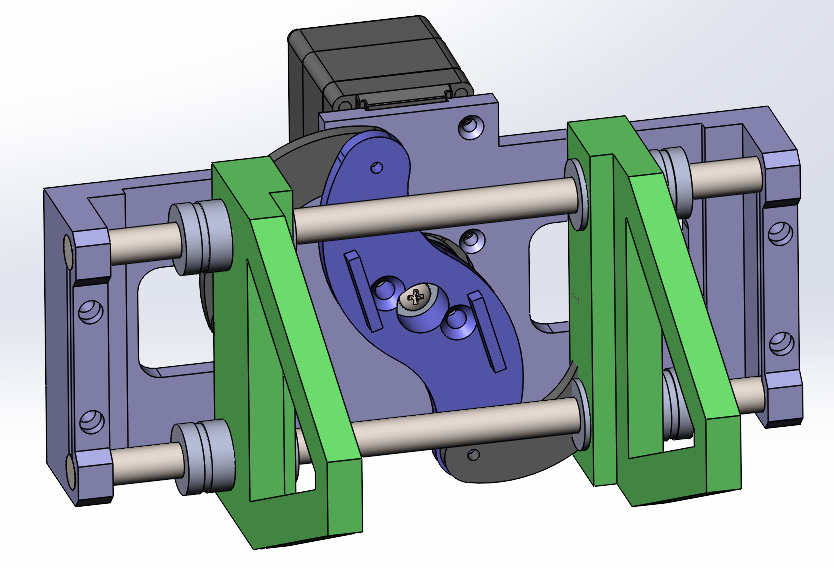
現在の設計に残る欠点の一つは、いわゆる「耳」です。アームが比較的狭い空間に入り込む必要がある場合、これらの突起が動きの自由度を大きく制限することがあります。これは、グリッパーが自身の軸に沿って回転する必要がある場合、平らな面の近くで作業する際にも問題になることがあります。
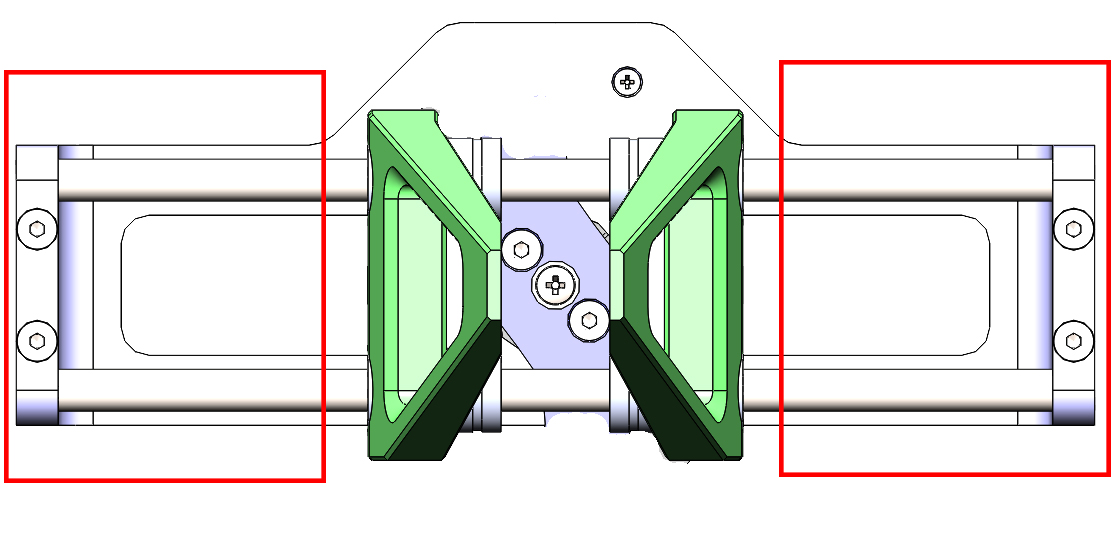
グリッパーの「耳」
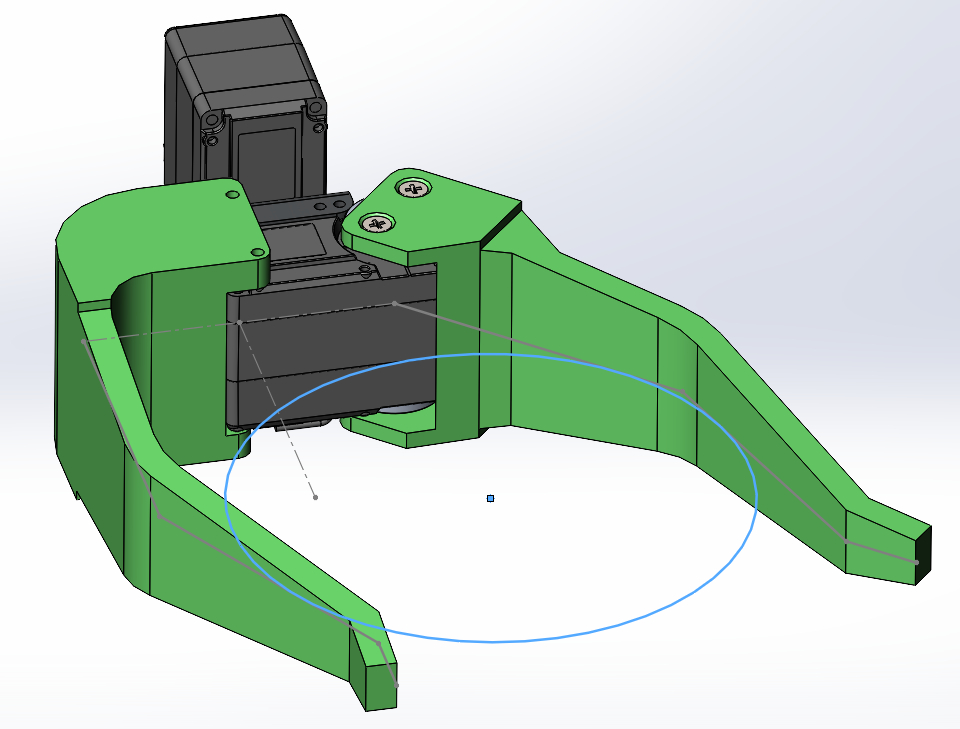
深度カメラ
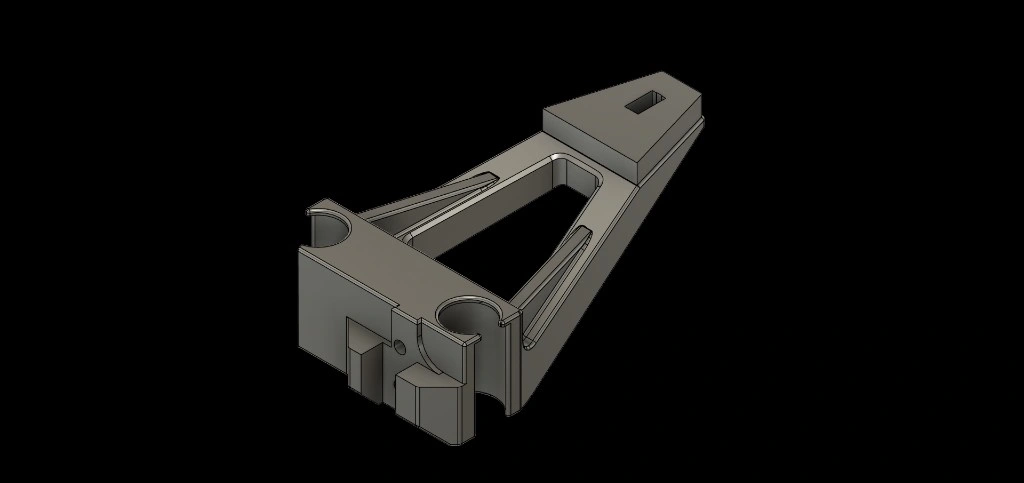
グリッパーは深度カメラと組み合わせて使用され、次の段階でカメラを取り付けるためのマウントプレートが追加されました。
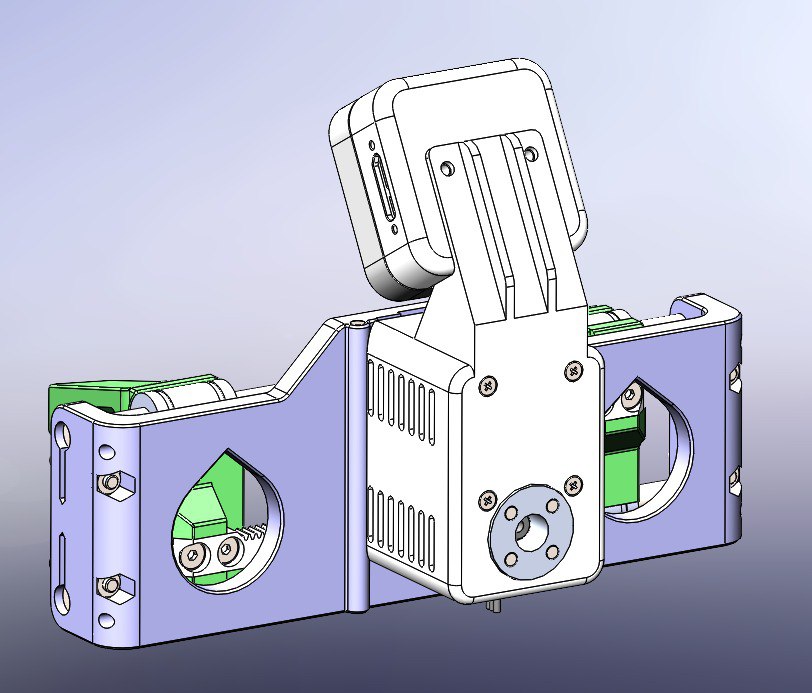
深度カメラのマウント
カメラは、できるだけ広い作業視野を確保するために45度の角度で配置されています。機械学習による制御モデルがこれを使用して、つかむ物体の寸法、必要な把持力、そして必要なジョーの開き幅を正確に判断します。これはグリッパーに取り付けられた唯一のセンサーです。
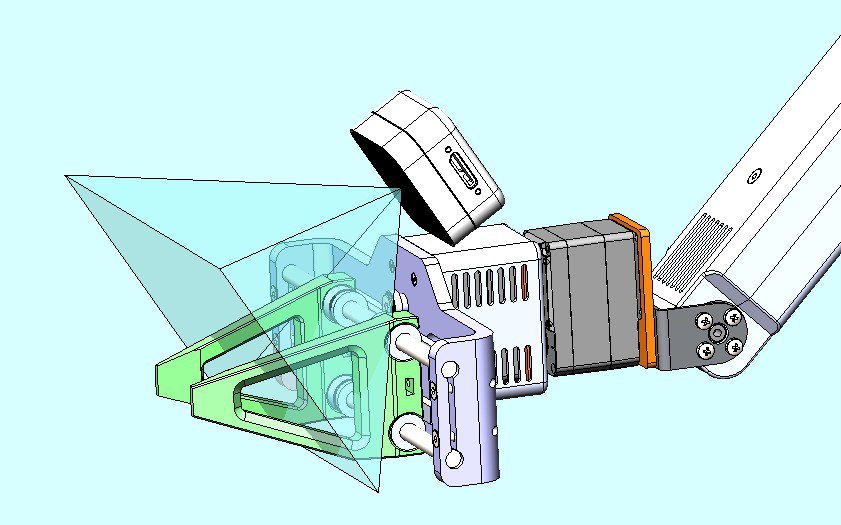
深度カメラの視野角
この時点で、私たちはそれ以上の設計作業を一旦中断し、現在の設計の実用上の問題を洗い出すためにプロトタイプの組み立てに移りました。一部の部品はAliExpressから注文しました。
部品表
電子部品
| 品目 | 説明 | 数量 | サプライヤーのリンク | 価格 | 備考 |
| ST3215 Servo | Waveshare Servo Motor STS3215 | 1 | Amazon – Waveshare STS3215 Servo | $28.99 | フィードバック付き高精度バスサーボ |
| Bus Servo Adapter | Waveshare Bus Servo Adapter Board | 1 | Amazon – Bus Servo Adapter A | $10.99 | TTL/RS485通信インターフェース |
機械部品
| 品目 | 説明 | 数量 | サプライヤーのリンク | 価格 | 備考 |
| MR106ZZ | ボールベアリング 10×6×3 mm | 2 | Amazon – ACROPIX MR106ZZ Bearings (10pcs) | $5.49 (10pcs) | シールド付き、潤滑済み |
| LM6UU | リニアベアリング 6×12×19 mm | 4 | Amazon – uxcell LM6UU Bearings (4pcs) | $8.99 (4pcs) | スムーズな直線運動のため |

スチールロッドとリニアベアリング
Rods
| 品目 | 説明 | 数量 | サプライヤーのリンク | 価格 | 備考 |
| Steel Rod | ステンレス鋼ロッド 6mm × 150mm | 2 | Amazon – uxcell Stainless Steel Rod 6mm×150mm (5pcs) | $8.39 (5pcs) | 高精度、耐腐食性 |
3D-Printed Parts
| Part Number | 説明 | 数量 | 材料 | 印刷設定 |
| RB9.01.060.010 | メインフレーム | 1 | PLA/PETG | 0.2mm layer, 20% infill |
| RB9.01.060.020 | クランプ | 2 | PLA/PETG | 0.2mm layer, 20% infill |
| RB9.01.060.030 | ギアラック | 2 | PLA/PETG | 0.15mm layer, 30% infill |
| RB9.01.060.040 | 駆動ギア | 1 | PLA/PETG | 0.15mm layer, 30% infill |
3Dプリントに関する備考
- 材料:プロトタイピングにはPLA、量産用途にはPETGを推奨
- レイヤー高さ:最適な表面仕上げには0.15~0.2mm
- インフィル:強度を確保するため、ギアには高めのインフィル(30%)を推奨
- サポート:プリント時の向きによって必要になる場合があります
- 後処理:ベアリングのはめ合いには軽いサンディングが必要になる場合があります
ねじ
| 品目 | 説明 | 数量 | 規格 | 価格 | 備考 |
| M3×10 | 皿ねじ | 4 | Amazon – M3×10 皿ねじs | $6.39 (100pcs) | ギアラックの取り付け用 |
| M3×20 | 皿ねじ | 4 | Amazon – M3×20 皿ねじs | $6.99 (100pcs) | クランプをロッドに取り付ける用 |
| M4×8 | 皿ねじ | 2 | Amazon – M4×8 皿ねじs | $9.99 (100pcs) | メインフレームのベアリング固定用 |
ナット
| 品目 | 説明 | 数量 | 規格 | 価格 | 備考 |
| M3 | 六角ナット | 4 | Amazon – M3 六角ナットs | $5.99 (100pcs) | クランプの組み立て用 |
サーボ用部品
| 品目 | 説明 | 数量 | 入手先 | 価格 | 備考 |
| タッピングねじ | サーボ取り付けねじ | 4 | サーボキット | 付属 | STS3215に付属 |
| サーボディスク | 出力シャフトアダプター | 1 | サーボキット | 付属 | STS3215に付属 |
| 取り付けねじ | ディスク固定ねじ | 1 | サーボキット | 付属 | STS3215に付属 |
コスト見積もり
| Category | 見積もりコスト(USD) |
| 電子部品 | $39.98 |
| 機械部品 | $22.87 |
| 3Dプリント材料 | $5-10 |
| 締結部品 | $1.60 (approximate) |
| 合計 | $69.45-74.45 |
コストは現時点、すなわち2025年6月6日のAmazonの価格に基づいています。締結部品は大量購入により大幅に節約できます。
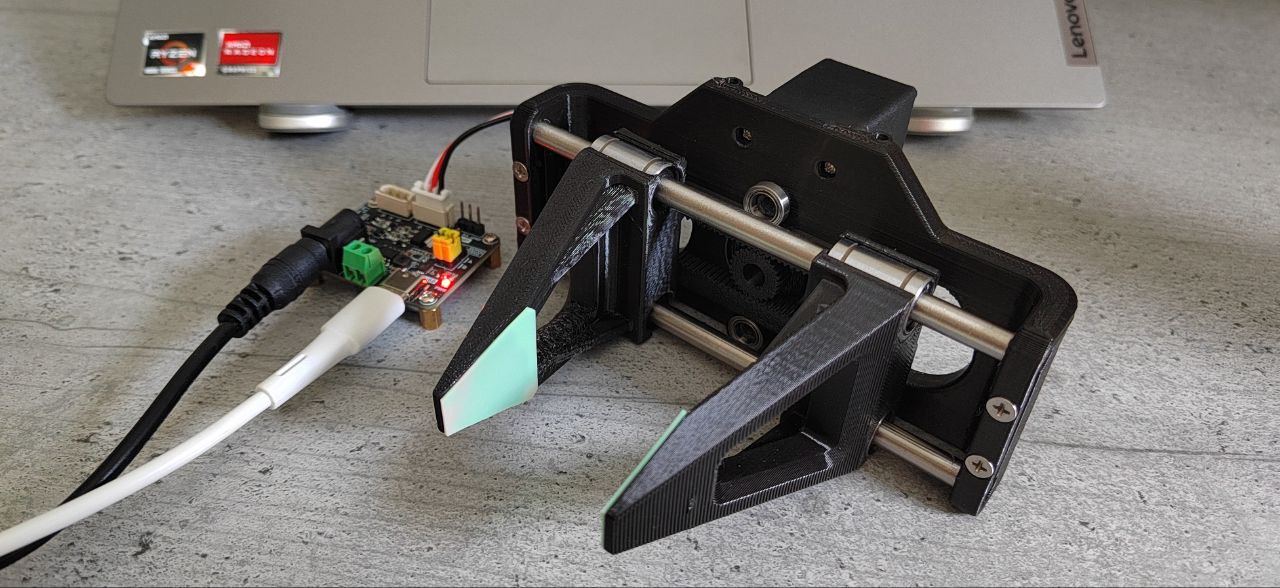
組み立て
最初のバージョンの組み立て中に、グリッパーのジョーの一つの印刷に問題が生じたため、最初のテストはジョー1つだけで行われました。
数日後、2つ目のジョーが届き、完全なテストを実施することができました。
エンジニアは物体をよりしっかりつかめるようにシリコンパッドを追加しました。この最初のバージョンは、私たちのGitHub上でオープンソースとして公開されています。
https://github.com/roboninecom/3D-Printed-Parallel-Gripper-for-Robotics-Arms
コミュニティからのフィードバック
Hadassah Freedman:
「この設計が、特にギアラックの付け根とジョーのピボット周りで、より重い荷重をどう扱うかを検討されたかどうか気になっていました。これらの箇所にフィレットを追加すれば、応力集中を減らし、FDMプリントでの層間剥離を防ぐのに役立ち、より重い荷重をより長期間、より頻繁に支えられるようになるかもしれません。ギアラックの付け根はそれなりの厚みがありますが、垂直のギア歯への移行部に明確なフィレットがなく、これは応力集中源になり得ます。また、ジョーのピボットにも、ピボットピンから側壁への荷重経路を滑らかにするためのフィレットが見当たりません。その能力についてもっと聞いてみたいです。」
Joy Kariya:
「リポジトリを見て、一つ提案があります。グリッパーの両側にリミットスイッチを組み込んで、時間遅延ではなく物体がつかまれた時点で停止するようにしてはどうでしょうか。そうすれば小さな物体もつかめるようになります。」
リミットスイッチを内蔵したグリッパー
印刷時間どのくらいかかりました全部で
0.2mm積層、インフィル30%で全パーツ合計およそ6時間です。フィンガーが一番時間を食います。
ありがとう、よく分かりました!
組んでみたけど開閉スムーズで感動グリスちょっと塗ったらさらに良くなった共有まで
印刷方向どうしてますフィンガー縦置き?横置き?層間剥離が怖くて
フィンガーは寝かせて積層し、荷重方向と層が直交しないように配置しています。これで層間剥離はかなり減ります。
正直見た目シンプルだけどよく考えられてると思う各リンクの寸法比に意味があるのが読んでてわかった力の伝達効率まで考えてるのすごい
デザインのセンスが好き機能美って感じ
コスパ最強グリッパーきたw
アクチュエーターの取り付け部、もう少し剛性ほしくないですか? 高速で開閉するとたわむ気が
ご指摘の通り高速動作ではマウント部がたわみます。次版でリブを追加して剛性を上げる予定です。
STLどこからダウンロードできますか?
記事末尾のGitHubリンクから一式ダウンロードできます。STEPファイルも同梱しています。
3Dプリントのグリッパー、想像以上にしっかりしてて驚いた!!! さっそくデータ落とさせてもらいます
ねじM3で統一されてるの地味にありがたい
指の表面ってなんか滑り止め貼ってます?
TPUで成形した薄いパッドを貼っています。摩擦が上がって滑りやすい対象でも安定します。
PLAで十分。
神デザイン
うわこれ欲しかったやつそのものじゃん最高すぎる週末作る
サーボ1個でこの開閉幅は優秀ですね自作だとどうしてもストローク稼げなくて困ってたので助かりました
把持力どれくらい出ます?
現行設計でフィンガー先端での把持力は約20Nです。リンク比を変えればもう少し上げられます。
うちの子これ作って大喜びしてました教育用途にもいいですね
対象物の大きさってどのくらいまで掴めますか細いケーブルとかいけます?
開口幅は最大80mm、最小はフィンガーが密着するまで閉じられるのでケーブルのような細物も把持可能です。
納得しました、ありがとう。
全体的に完成度が高く実用に足る設計だと感じました。フィンガー交換式にした点も用途の幅が広くて素晴らしいです。
丁寧な組立手順の解説に感謝します。初めての自作でも迷わず組めました。
ヒンジのクリアランスってどれくらい取ってますプリンタによって調整必要ですよね
公称で0.2mmのクリアランスにしています。プリンタの寸法精度次第で0.1〜0.3mmの範囲で調整してください。
とても助かりました、感謝します。
オープンソースなの最高です、週末に印刷してみます!
フィンガーの根本にかかる応力ってシミュレーションしました?それとも経験則で肉厚決めた感じ?
簡単なFEMで応力集中を確認した上でフィレットと肉厚を決めています。経験則だけだと根本で折れがちなので。
バネ使わずにこの戻り動作実現してるのが賢い
リンク機構の設計めちゃ参考になりますうちは平行リンクで作ってたけどこっちのほうがシンプルでいいな部品点数減らせそう