Construire un bras open source. La pince
 12758
12758
Je souhaite partager quelques détails sur l’avancement du développement de notre manipulateur abordable. En ce moment, nous préparons activement l’étape d’assemblage du premier prototype du bras robotique.
Bras robotique à 7 degrés de liberté
Nous nous sommes fixé un objectif assez ambitieux : atteindre des caractéristiques comparables à celles des principaux manipulateurs de recherche — 650 mm de longueur, 7 degrés de liberté, une capacité de charge utile allant jusqu’à 3 kg et une précision de positionnement de l’ordre de 1 mm. Tous les fichiers sources et les développements seront rendus publics — ou presque tous, selon le niveau de soutien que nous recevrons de la communauté de la robotique.
Qu’est-ce qu’une pince
La première chose que nous sommes prêts à partager, c’est la pince.
Description : Une pince est un dispositif mécanique ou robotique conçu pour saisir, tenir, manipuler ou transporter des objets. Elle sert de « main » ou d’effecteur terminal d’un bras robotique ou d’un système d’automatisation, permettant au robot d’interagir avec le monde physique en saisissant et en relâchant des objets.
La pince est disponible en open source sur GitHub.
Nous avons étudié de nombreuses options de conception pour la pince et avons finalement choisi un mécanisme à mors parallèles. Les critères que nous avons utilisés pour sélectionner la conception étaient les suivants :
- Simplicité de construction
- Capacité à saisir des objets ronds
- Capacité à ramasser des objets plats sur une table
- Utilisation minimale de servomoteurs
- Coût et fiabilité de la conception
Pince rotative à un seul mors
L’une des conceptions de pince les plus simples que nous ayons rencontrées — la pince rotative à un seul mors — est une configuration où un mors est fixe et l’autre est monté directement sur l’arbre d’un servomoteur.
Pince rotative à un seul mors (vue 3D)
- L’inconvénient de cette solution est que le bord avant du mors mobile décrit un arc. Ainsi, si nous devons saisir un petit objet avec l’extrémité de la pince, il faut tenir compte du fait que l’objet doit être positionné le long de cette trajectoire en arc lors de la fermeture.
- Un deuxième inconvénient est que, puisqu’un seul mors bouge, la largeur maximale de l’objet pouvant être saisi est limitée par la course de ce seul mors mobile. Pour saisir le même volume qu’une pince parallèle, les mors doivent être nettement plus longs.
Comparaison de la longueur des mors. Pince rotative à un seul mors par rapport à la pince parallèle
- Le troisième inconvénient est que ce type de pince est asymétrique, c’est-à-dire que le centre de masse est toujours décalé vers le côté mobile.
Compte tenu de tous ces inconvénients de la pince rotative à un seul mors, nous avons décidé d’explorer plutôt des conceptions de pince parallèle symétrique.
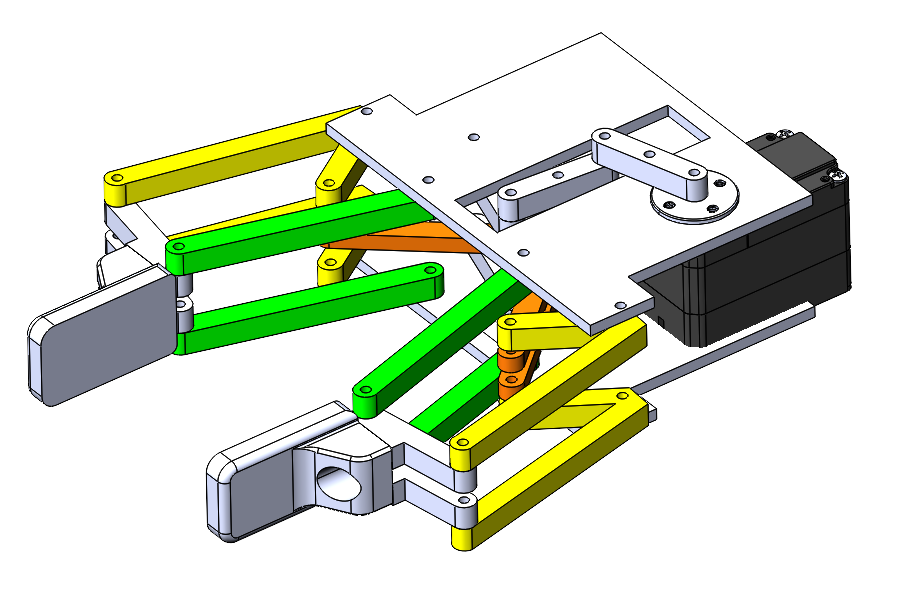
Pince parallèle à quadrilatère articulé par rapport à la pince parallèle classique
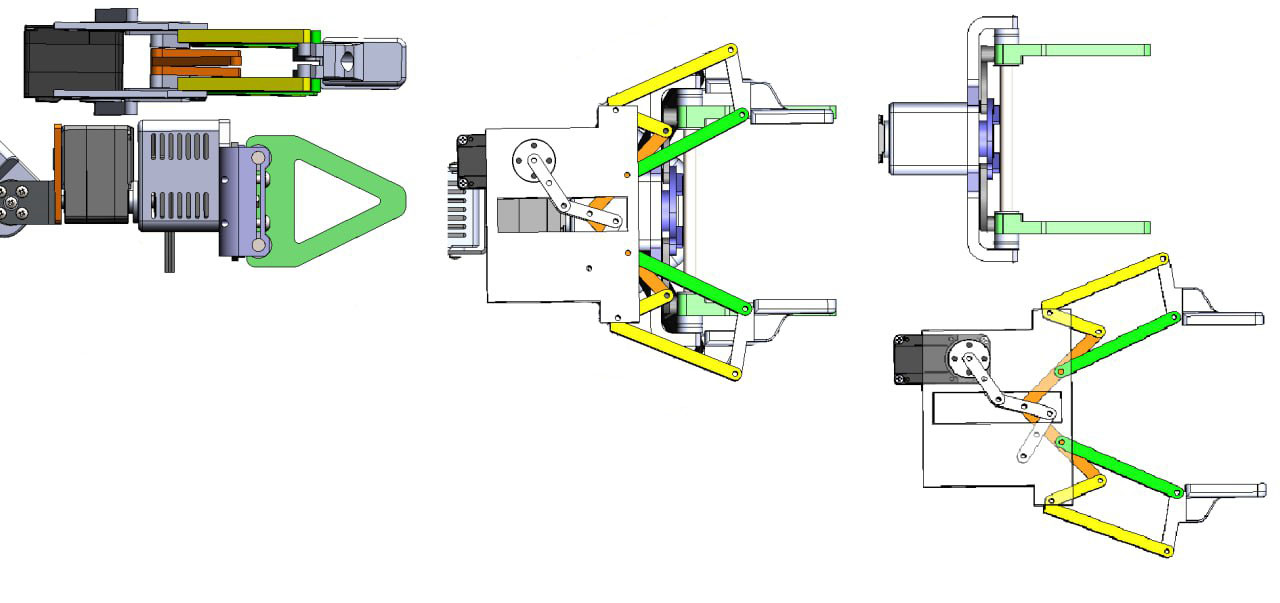
Pince parallèle à quadrilatère articulé par rapport à la pince parallèle classique
L’image ci-dessus montre deux versions d’une pince à mors parallèles utilisant un seul servomoteur. La pince parallèle à quadrilatère articulé, où les mors s’ouvrent en formant un angle, s’avère nettement plus complexe en termes de nombre de pièces et d’encombrement global.
Nous aurions pu continuer à optimiser cette conception, mais nous avons décidé qu’une pince parallèle est plus simple à assembler et, par conséquent, moins coûteuse à fabriquer.
Mécanisme à bielle-manivelle et balancier
Mécanisme à bielle-manivelle et balancier
La question importante suivante était le choix du mécanisme de coulissement. La première option proposée par l’ingénieur était le mécanisme à bielle-manivelle et balancier. Un inconvénient majeur de cette conception de pince est sa hauteur. Si les mors de la pince sont plus courts que la hauteur du mécanisme de coulissement, la partie inférieure gênera la préhension d’objets sur des surfaces planes, limitant la capacité à saisir des objets particulièrement plats. Si l’on allonge les mors pour compenser, la pince devient assez encombrante.
C’est pourquoi nous sommes passés à l’examen du mécanisme de pince à crémaillère et pignon.
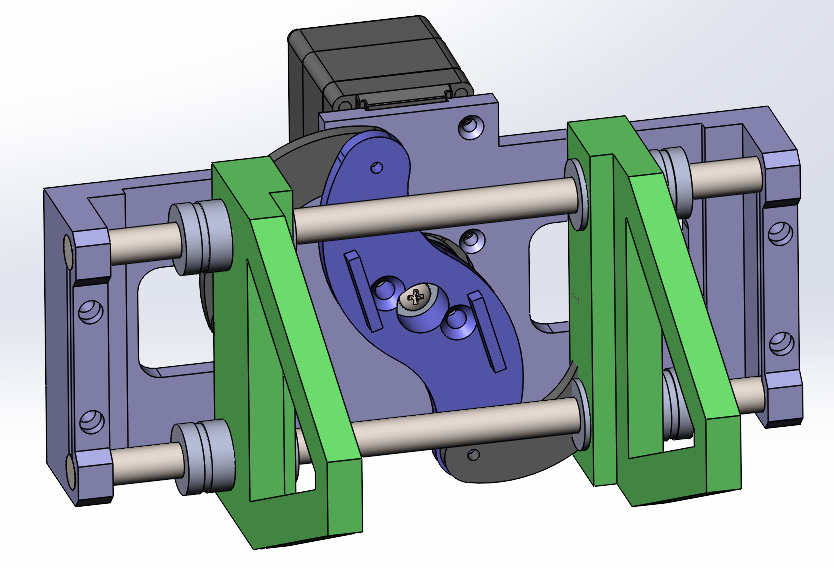
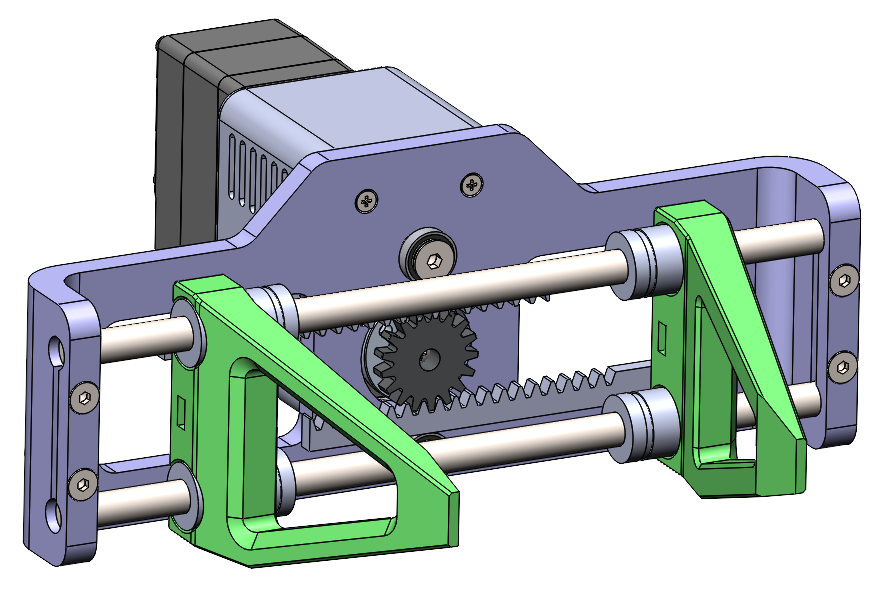
Mécanisme de pince à crémaillère et pignon
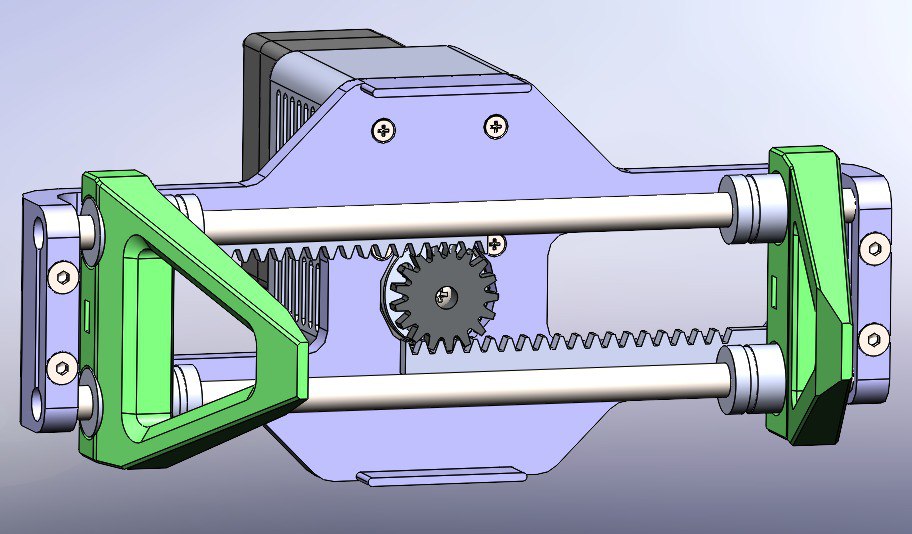
Mécanisme de pince à crémaillère et pignon. Version 1
Sur cette image, nous avons remplacé le balancier par un mécanisme à crémaillère. On voit aussi combien d’espace libre a été gagné par rapport à la version précédente.
À l’étape suivante, l’ingénieur a ajouté des butées et réduit la hauteur de l’ensemble.
Mécanisme de pince à crémaillère et pignon. Version 2
L’un des inconvénients qui subsistent dans la conception actuelle, ce sont les “oreilles” : lorsque le bras doit pénétrer dans des espaces relativement étroits, ces excroissances peuvent considérablement limiter la capacité de manœuvre. Cela peut aussi devenir un problème lors d’un travail à proximité de surfaces planes si la pince doit pivoter autour de son axe.
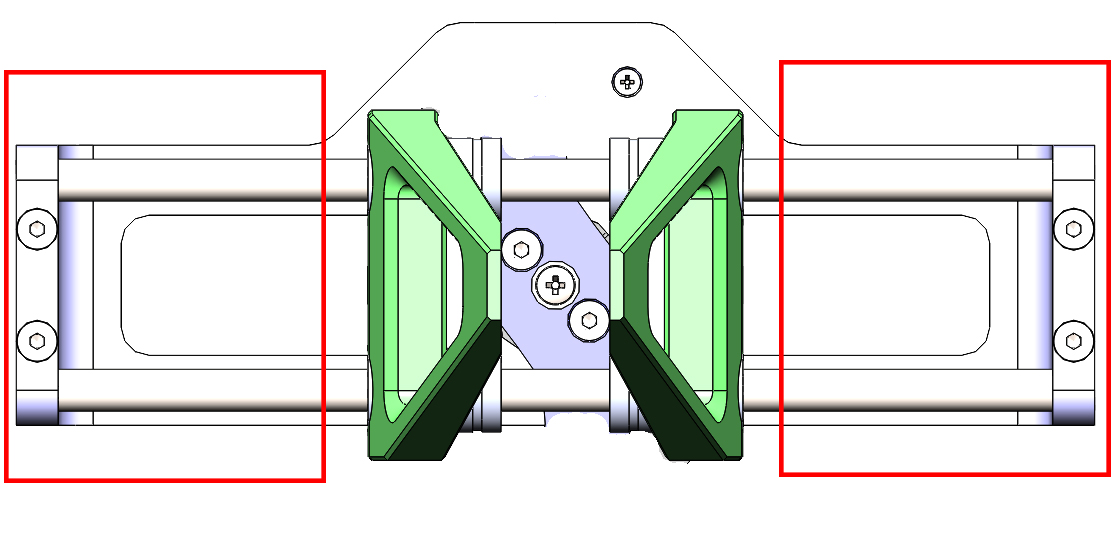
Les « oreilles » de la pince
Caméra de profondeur
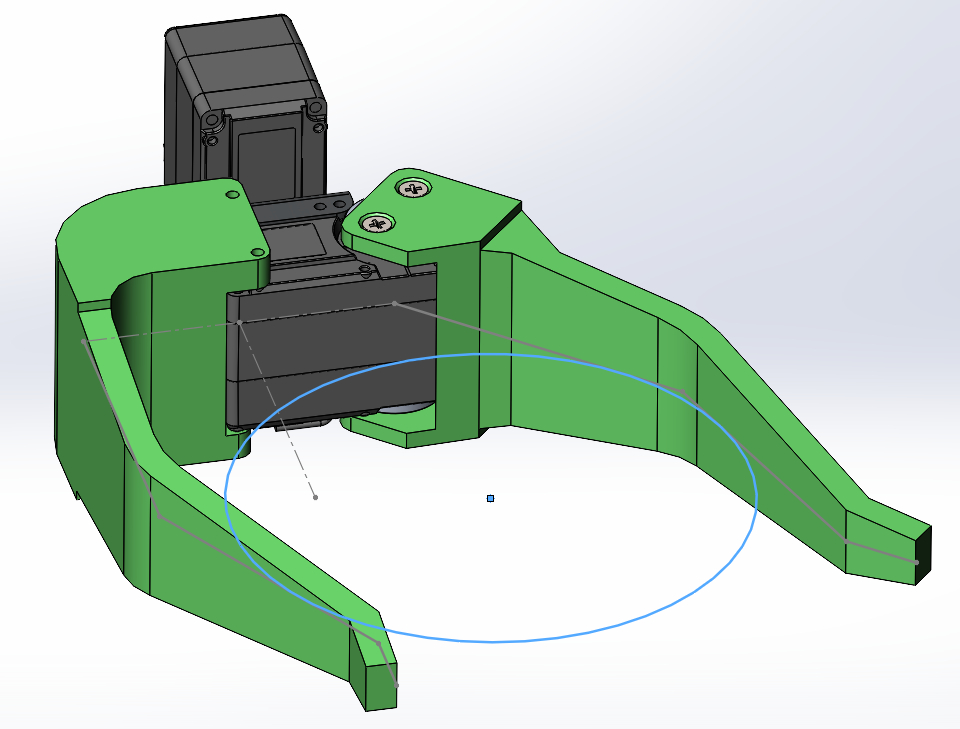
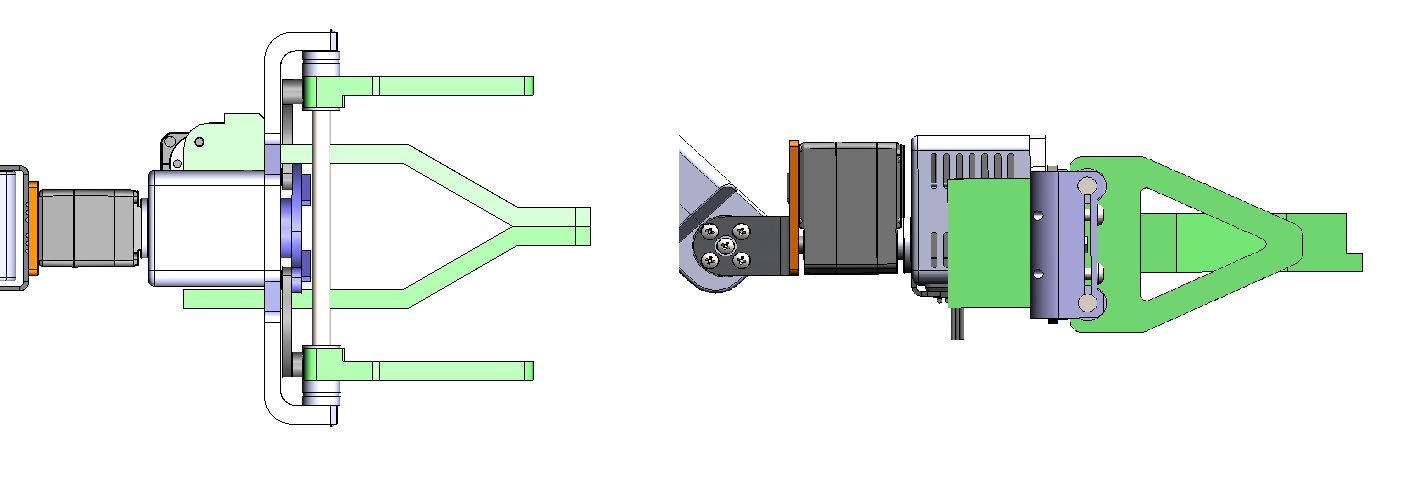
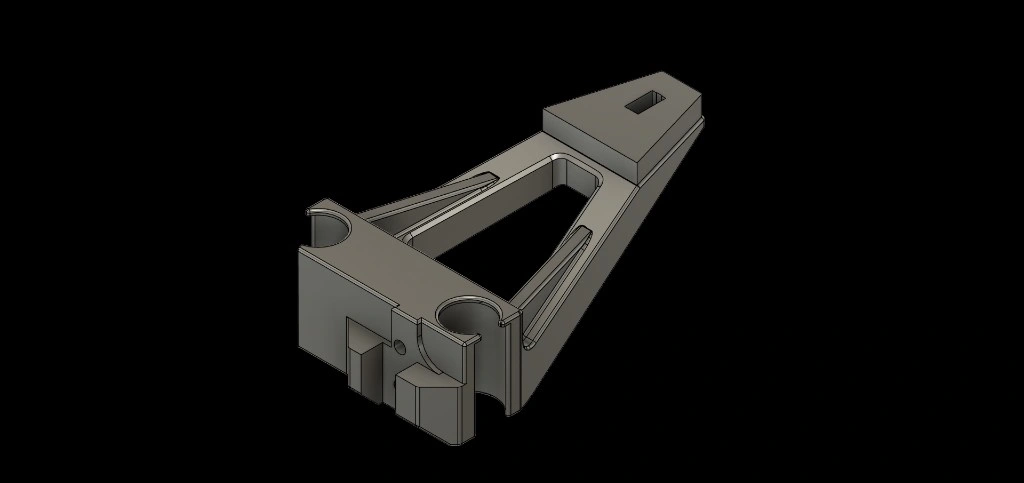
La pince est utilisée en combinaison avec une caméra de profondeur et, à l’étape suivante, une plaque de fixation a été ajoutée pour y fixer la caméra.
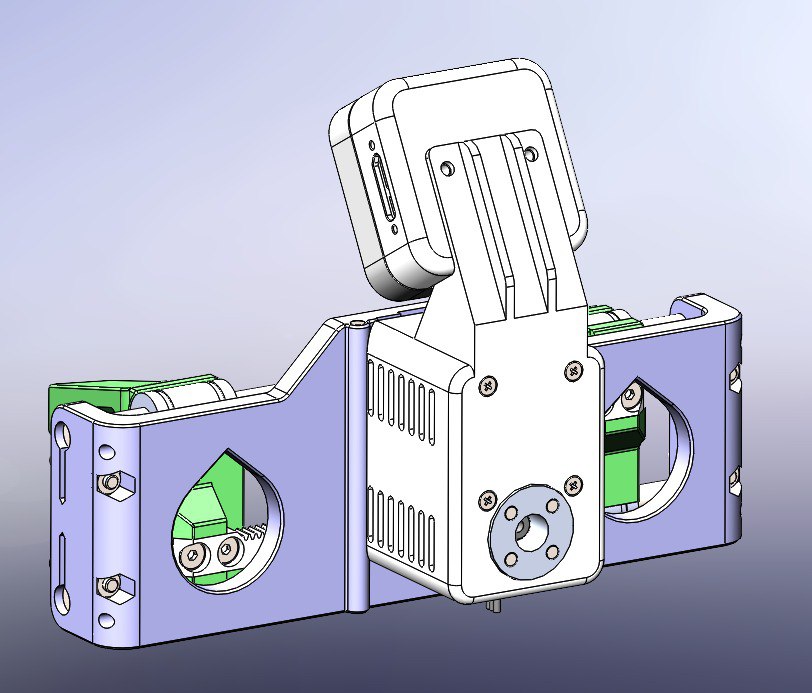
Support de la caméra de profondeur
La caméra est positionnée à un angle de 45 degrés afin d’obtenir le champ de vision de travail le plus large possible. Elle est utilisée par un modèle de commande par apprentissage automatique pour déterminer avec précision les dimensions de l’objet à saisir, la force de préhension requise et l’écartement nécessaire des mors. C’est le seul capteur installé sur la pince.
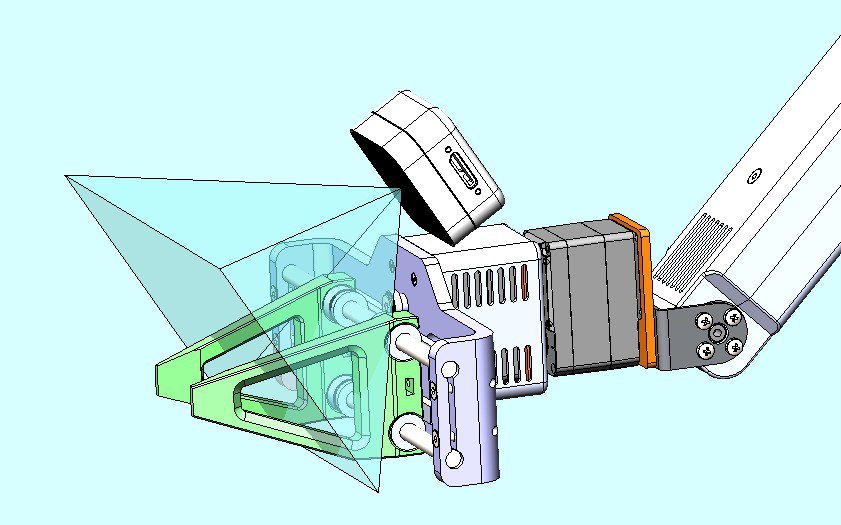
Angle de vue de la caméra de profondeur
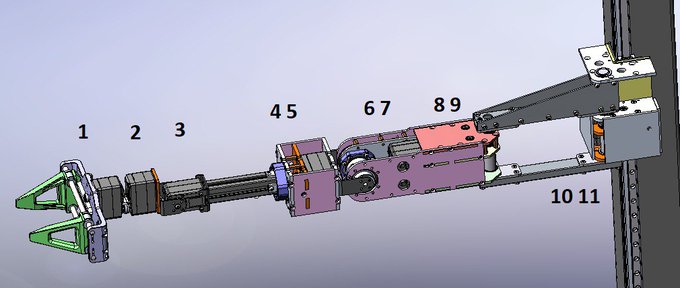
À ce stade, nous avons mis en pause la suite du travail de conception et sommes passés à l’assemblage du prototype afin d’identifier les éventuels problèmes pratiques de la conception actuelle. Certains des composants ont été commandés sur AliExpress.
Nomenclature des matériaux
Composants électroniques
| Article | Description | Qté | Lien du fournisseur | Prix | Remarques |
| ST3215 Servo | Waveshare Servo Motor STS3215 | 1 | Amazon – Waveshare STS3215 Servo | $28.99 | Servomoteur de bus haute précision avec retour d’information |
| Bus Servo Adapter | Waveshare Bus Servo Adapter Board | 1 | Amazon – Bus Servo Adapter A | $10.99 | Interface de communication TTL/RS485 |
Composants mécaniques
| Article | Description | Qté | Lien du fournisseur | Prix | Remarques |
| MR106ZZ | Roulement à billes 10×6×3 mm | 2 | Amazon – ACROPIX MR106ZZ Bearings (10pcs) | $5.49 (10pcs) | Blindé, prélubrifié |
| LM6UU | Roulement linéaire 6×12×19 mm | 4 | Amazon – uxcell LM6UU Bearings (4pcs) | $8.99 (4pcs) | Pour un mouvement linéaire fluide |

Tiges en acier et roulements linéaires
Rods
| Article | Description | Qté | Lien du fournisseur | Prix | Remarques |
| Steel Rod | Tige en acier inoxydable 6 mm × 150 mm | 2 | Amazon – uxcell Stainless Steel Rod 6mm×150mm (5pcs) | $8.39 (5pcs) | Haute précision, résistant à la corrosion |
3D-Printed Parts
| Part Number | Description | Qté | Matériau | Paramètres d’impression |
| RB9.01.060.010 | Châssis principal | 1 | PLA/PETG | 0.2mm layer, 20% infill |
| RB9.01.060.020 | Pince de serrage | 2 | PLA/PETG | 0.2mm layer, 20% infill |
| RB9.01.060.030 | Crémaillère | 2 | PLA/PETG | 0.15mm layer, 30% infill |
| RB9.01.060.040 | Pignon d’entraînement | 1 | PLA/PETG | 0.15mm layer, 30% infill |
Remarques sur l’impression 3D
- Matériau : PLA recommandé pour le prototypage, PETG pour la production
- Hauteur de couche : 0,15-0,2 mm pour un état de surface optimal
- Remplissage : un remplissage plus élevé (30 %) est recommandé pour les pignons afin d’assurer la solidité
- Supports : peuvent être nécessaires selon l’orientation d’impression
- Post-traitement : un léger ponçage peut être nécessaire pour l’ajustement des roulements
Vis
| Article | Description | Qté | Standard | Prix | Remarques |
| M3×10 | Vis à tête fraisée | 4 | Amazon – M3×10 Vis à tête fraisées | $6.39 (100pcs) | Pour la fixation de la crémaillère |
| M3×20 | Vis à tête fraisée | 4 | Amazon – M3×20 Vis à tête fraisées | $6.99 (100pcs) | Pour la fixation de la pince de serrage à la tige |
| M4×8 | Vis à tête fraisée | 2 | Amazon – M4×8 Vis à tête fraisées | $9.99 (100pcs) | Pour le maintien du roulement du châssis principal |
Écrous
| Article | Description | Qté | Standard | Prix | Remarques |
| M3 | Écrou hexagonal | 4 | Amazon – M3 Écrou hexagonals | $5.99 (100pcs) | Pour l’assemblage de la pince de serrage |
Visserie du servomoteur
| Article | Description | Qté | Source | Prix | Remarques |
| Vis autotaraudeuses | Vis de fixation du servomoteur | 4 | Kit du servomoteur | Inclus | Inclus avec le STS3215 |
| Disque du servomoteur | Adaptateur d’arbre de sortie | 1 | Kit du servomoteur | Inclus | Inclus avec le STS3215 |
| Vis de fixation | Vis de maintien du disque | 1 | Kit du servomoteur | Inclus | Inclus avec le STS3215 |
Estimation des coûts
| Category | Coût estimé (USD) |
| Composants électroniques | $39.98 |
| Composants mécaniques | $22.87 |
| Matériaux d’impression 3D | $5-10 |
| Visserie | $1.60 (approximate) |
| Total | $69.45-74.45 |
Coûts basés sur les prix Amazon à la date actuelle — 6 juin 2025. Les achats en grande quantité permettent des économies importantes sur la visserie.
Assemblage
Assemblage guide:
https://github.com/roboninecom/3D-Printed-Parallel-Gripper-for-Robotics-Arms/blob/main/docs/assembly-guide.md
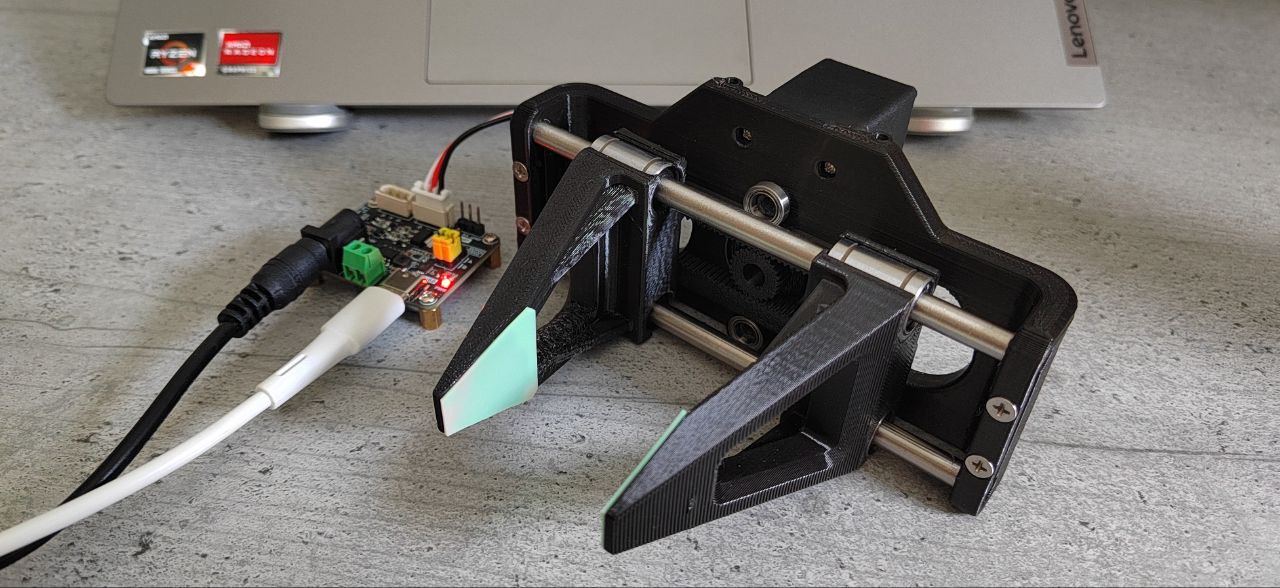
Lors de l’assemblage de la première version, un problème est survenu avec l’impression de l’un des mors de la pince ; le premier test a donc été réalisé avec un seul mors.
Quelques jours plus tard, le second mors est arrivé et nous avons pu effectuer des tests complets.
L’ingénieur a ajouté des patins en silicone pour une meilleure adhérence sur les objets. Cette même première version a été publiée en open source sur notre GitHub :
https://github.com/roboninecom/3D-Printed-Parallel-Gripper-for-Robotics-Arms
Retours de la communauté
Hadassah Freedman:
“Je me demandais si vous aviez réfléchi à la façon dont la conception se comporte sous des charges plus lourdes, en particulier autour de la base de la crémaillère et des pivots des mors. Ajouter des congés dans ces zones pour aider à réduire les concentrations de contraintes et éviter le délaminage des couches des impressions FDM permettrait à la conception de supporter des charges plus lourdes, plus longtemps et plus souvent. Je vois que la base de la crémaillère a une épaisseur convenable, mais sans congés nets à la transition vers les dents verticales, ce qui peut constituer un concentrateur de contraintes ; les pivots des mors ne présentent pas non plus de congés visibles pour lisser les chemins de charge depuis les axes de pivot jusque dans les parois latérales. Je serais curieux d’en savoir plus sur ses capacités.”
Joy Kariya:
“J’ai parcouru le dépôt et j’ai une suggestion : pourquoi ne pas intégrer des fins de course des deux côtés de la pince afin que, au lieu d’une temporisation, elle s’arrête lorsque l’objet est saisi. Ainsi, elle pourrait aussi attraper de petits objets.”
Pince avec fins de course intégrées
superbe
la course d’ouverture me semble un peu limitée pour saisir des objets larges non ?
C’est un compromis assumé pour garder une pince compacte. Si vous avez besoin de plus de course, le fichier paramétrique permet d’allonger les biellettes ; on documente la modif dans le dépôt.
Merci, c’est clair maintenant !
Je travaille sur un projet de fin d’études en robotique et votre pince va me servir de base, c’est exactement le genre de référence open source bien documentée dont j’avais besoin. Un grand merci à toute l’équipe.
Beau travail sur la cinématique parallèle, le maintien des doigts parallèles tout au long de la course c’est exactement ce qu’il faut pour saisir des objets plats. J’ai bricolé un truc similaire l’an dernier mais avec un seul servo et ça coinçait sur les angles, votre approche est bien plus propre.
Projet vraiment abouti. J’apprécie particulièrement que la nomenclature soit complète avec les références exactes de visserie, c’est tellement souvent oublié dans les projets open source qu’on perd des heures à deviner les bonnes longueurs de vis. Merci pour ce souci du détail.
quel servo vous recommandez pour actionner la pince ? le sts3215 suffit ?
Oui, un seul STS3215 suffit largement pour cette pince. Avec 30 kg·cm de couple à 12 V et le retour de position intégré, on peut faire un contrôle d’effort simple via le courant. C’est ce qu’on utilise sur le prototype montré.
design propre. impression facile. assemblage en 20 min. rien à redire.
ça change des pinces moches habituelles, vraiment soigné le design
imprimé en PLA, monté, ça marche du premier coup. content !
on peut motoriser avec un servo standard hobby ou il faut absolument du bus série ?
Un servo hobby PWM classique fonctionne mécaniquement, mais vous perdez le retour de position et le contrôle d’effort par le courant. Pour une simple ouverture/fermeture c’est suffisant ; pour de la préhension contrôlée, le bus série apporte beaucoup.
Merci beaucoup pour l’explication.
les revêtements en TPU sur les doigts c’est une super idée pour le grip, j’aurais pas pensé
vous avez prévu un capteur de force sur les doigts ou c’est juste le courant moteur qui sert de retour ?
Pour l’instant on se base sur le courant moteur du servo comme estimation grossière de l’effort de préhension. Une version avec FSR sur les doigts est dans la feuille de route, ça donnera un retour bien plus fin.
Merci pour la réponse détaillée.
le design de la pince est super propre, bravo pour le boulot de modélisation
trop bien ce projet, je vais tenter de l’imprimer ce week-end !!!
le jeu dans les liaisons imprimées se rattrape comment ? vous mettez des paliers ?
Sur les pivots les plus sollicités on insère de petits roulements 623ZZ, c’est dans la nomenclature. Les pivots secondaires tournent directement sur des axes acier rectifiés, ce qui limite déjà bien le jeu.
Question peut-être bête mais est-ce que le fichier est paramétrique ? j’aimerais adapter la largeur à ma propre application
Pas bête du tout. Oui, le modèle est entièrement paramétrique (FreeCAD), les principales cotes — largeur, course, épaisseur des doigts — sont pilotées par un tableau de variables. Vous pouvez régénérer toute la pince en changeant quelques valeurs.
Ça a du sens, merci.
perso j’ai remplacé les inserts laiton par des écrous prisonniers et ça marche nickel aussi, du coup pour ceux qui ont pas de fer à souder
merci pour les fichiers !
top, je rajoute ça à ma liste de projets du mois
ENORME merci, je cherchais une pince open source qui soit pas une usine à gaz
sa coince un peu sur l’axe quand on imprime sans support, faut bien régler les tolérances
vous avez une estimation de la force de serrage max ?
Avec un STS3215 à 12 V (30 kg·cm de couple au pignon), la force au bout des doigts dépend du bras de levier de la biellette, mais elle est largement suffisante pour la plupart des objets du quotidien avant que la régulation de courant ne plafonne.
vous imprimez en quoi pour les doigts ? du PETG ou du PLA ?
Les doigts sont en PETG pour la tenue mécanique et la résistance aux chocs. Le corps de la pince est en PLA+, qui suffit largement vu qu’il n’encaisse pas d’effort direct.
le mecanisme a biellette est elegant mais jai peur de l’usure sur le long terme au niveau des pivots imprimés
j’ai imprimé, ça tourne nickel, juste pensez à poncer légèrement les pivots