打造一只开源机械臂。夹爪
 13181
13181
我想分享一些关于我们这款经济型机械臂研发进展的细节。目前,我们正在积极为第一台机械臂原型的组装阶段做准备。
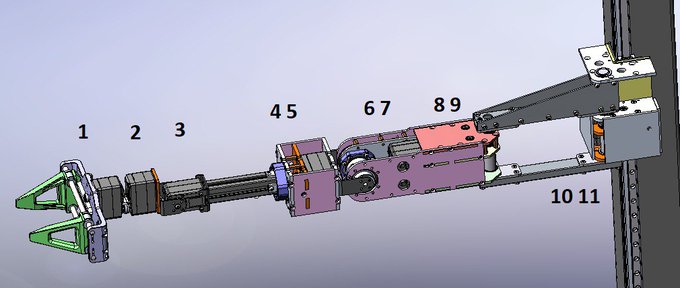
7 自由度机械臂
我们为自己设定了一个相当宏大的目标:达到可与顶尖科研级机械臂相媲美的规格——长度 650 mm、7 个自由度、最高 3 kg 的负载能力,以及 1 mm 以内的定位精度。所有源文件和研发成果都将公开发布——或者说几乎全部,这取决于我们从机器人社区获得的支持力度。
什么是夹爪
我们准备分享的第一件东西就是夹爪。
说明:夹爪是一种用于抓取、握持、操作或搬运物体的机械或机器人装置。它充当机械臂或自动化系统的“手”或末端执行器,使机器人能够通过抓取和释放物体与物理世界交互。
我们考虑了多种夹爪设计方案,最终选择了平行夹爪机构。我们在选择设计时所依据的标准如下:
- 结构简单
- 能够抓取圆形物体
- 能够从桌面上拾取扁平物体
- 尽量少用舵机
- 设计的成本与可靠性
单爪旋转夹爪
我们遇到过的最简单的夹爪设计之一,大概要数单爪旋转夹爪——这种结构中一只夹爪固定不动,另一只则直接装在舵机的轴上。
- 这种方案的缺点在于,活动夹爪的前缘是沿着圆弧运动的。因此,如果要用夹爪的尖端抓取小物体,就必须考虑到在闭合过程中物体必须位于该圆弧轨迹上。
- 第二个缺点在于,由于只有一只夹爪运动,可抓取物体的最大宽度受限于这只活动夹爪的行程。要想抓取与平行夹爪相同的体积,夹爪就必须做得长得多。
夹爪长度对比。单爪旋转夹爪与平行夹爪
- 第三个缺点在于,这类夹爪是非对称的,也就是说重心始终偏向活动的一侧。
考虑到单爪旋转夹爪的所有这些缺点,我们决定改为研究对称的平行夹爪设计。
四连杆平行夹爪与普通平行夹爪
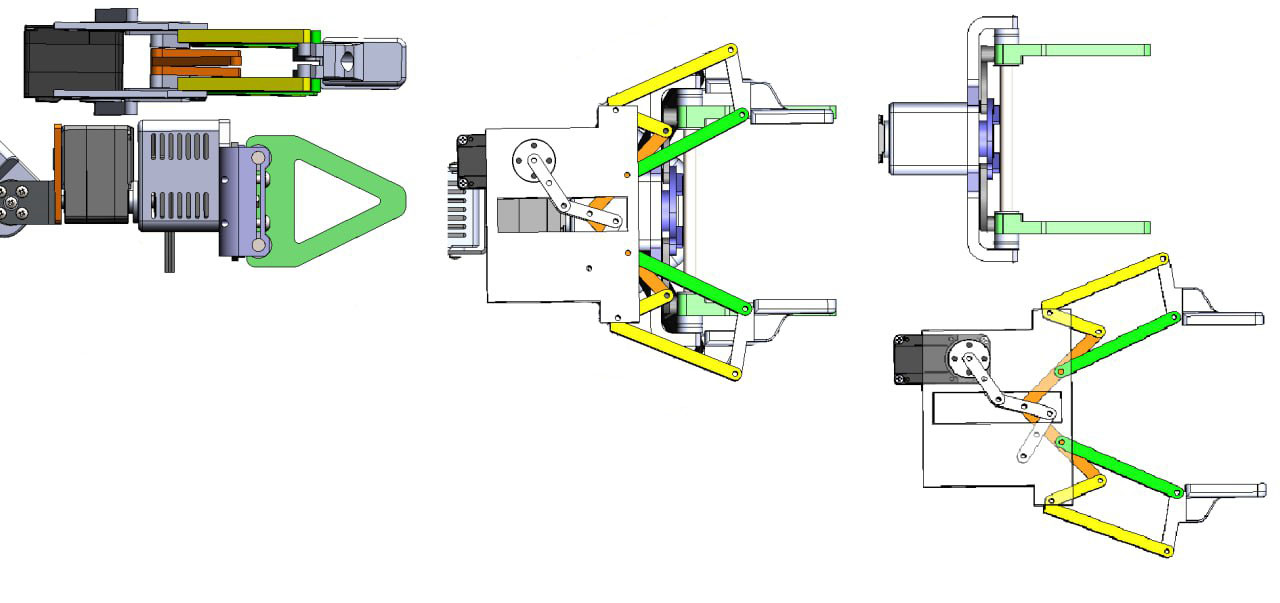
四连杆平行夹爪与普通平行夹爪
上图展示了使用单个舵机的两种平行夹爪方案。四连杆平行夹爪的夹爪呈一定角度张开,结果在零件数量和整体尺寸上都明显更为复杂。
我们本可以继续优化那个设计,但我们认为平行夹爪更易于组装,因此制造成本也会更低。
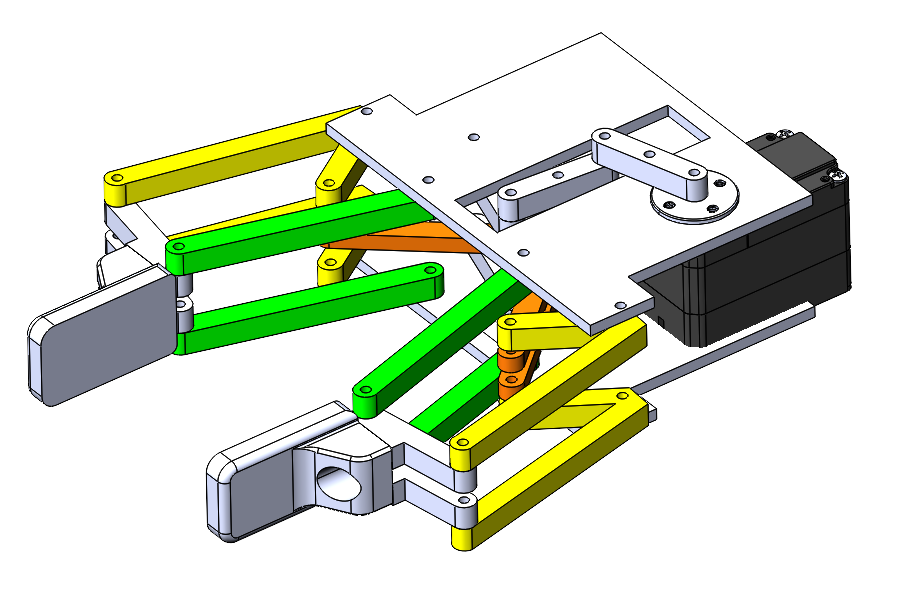
曲柄摇杆连杆机构
曲柄摇杆连杆机构
接下来一个重要的问题是滑动机构的选择。工程师提出的第一个方案是曲柄摇杆连杆机构。这种夹爪设计的一个显著缺点是它的高度。如果夹爪比滑动机构的高度还短,底部就会妨碍从平面上拾取物体,限制了抓取尤其扁平物品的能力。如果为了弥补而把夹爪做得更高,夹爪又会变得相当笨重。
正因如此,我们转而考虑齿轮齿条夹爪机构。
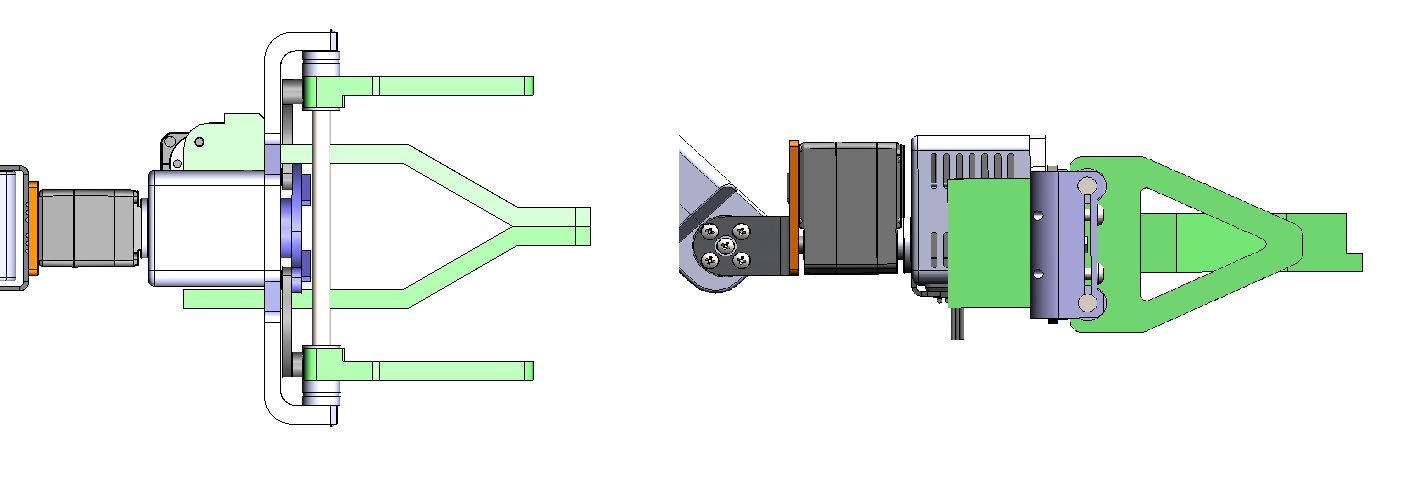
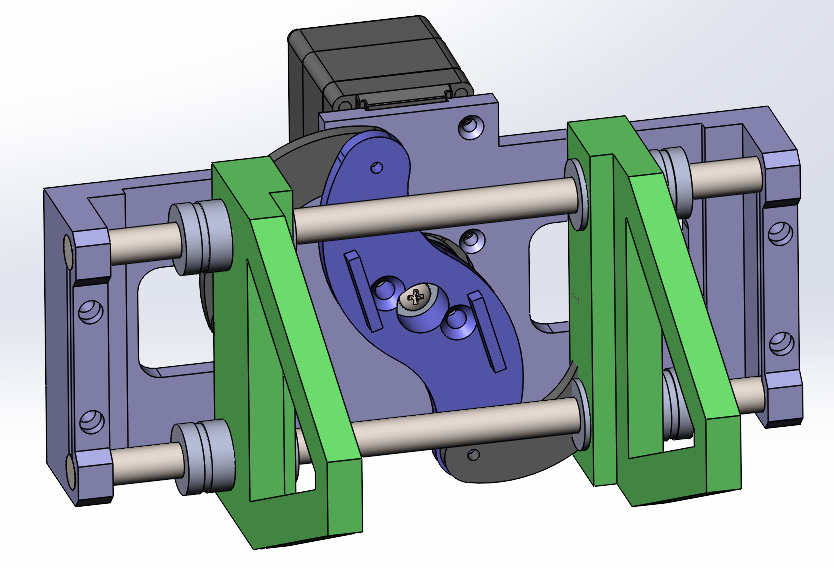
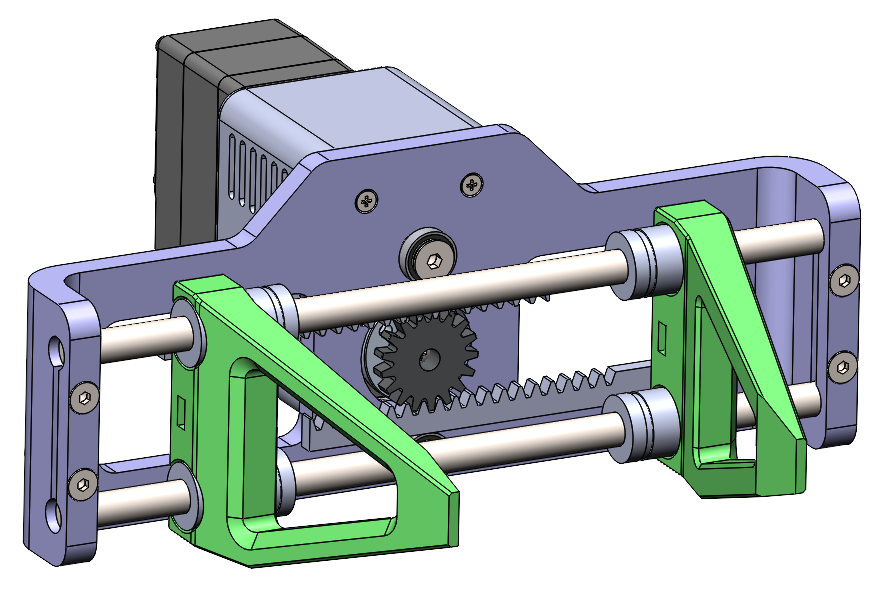
齿轮齿条夹爪机构
齿轮齿条夹爪机构。版本 1
在这张图中,我们用齿条机构取代了摇杆。你还可以看到与上一版本相比腾出了多少空间。
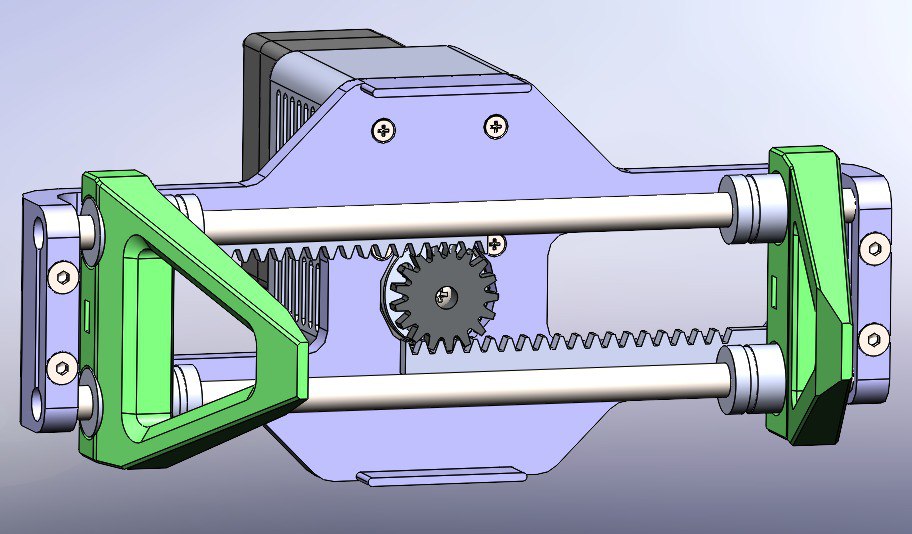
在下一阶段,工程师增加了限位块并降低了整个组件的高度。
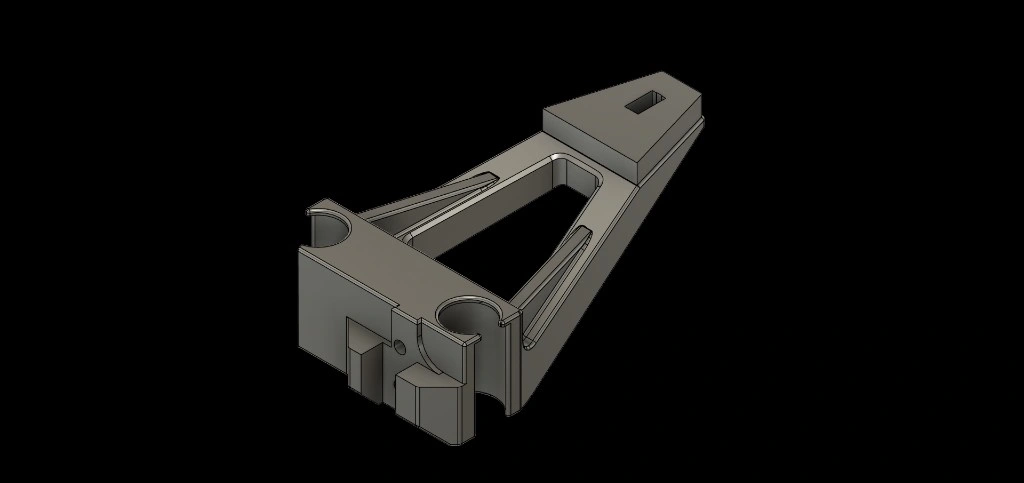
齿轮齿条夹爪机构。版本 2
当前设计尚存的缺点之一是所谓的“耳朵”——当机械臂需要伸入相对狭窄的空间时,这些凸出部分会大大限制其活动能力。如果夹爪需要绕自身轴线旋转,那么在靠近平面工作时这也会成为一个问题。
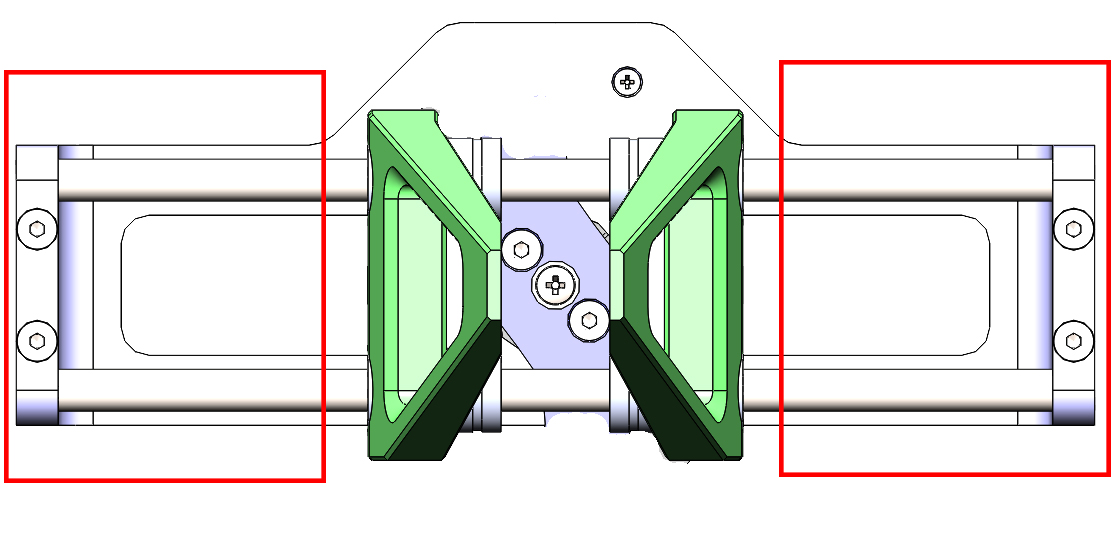
夹爪的“耳朵”
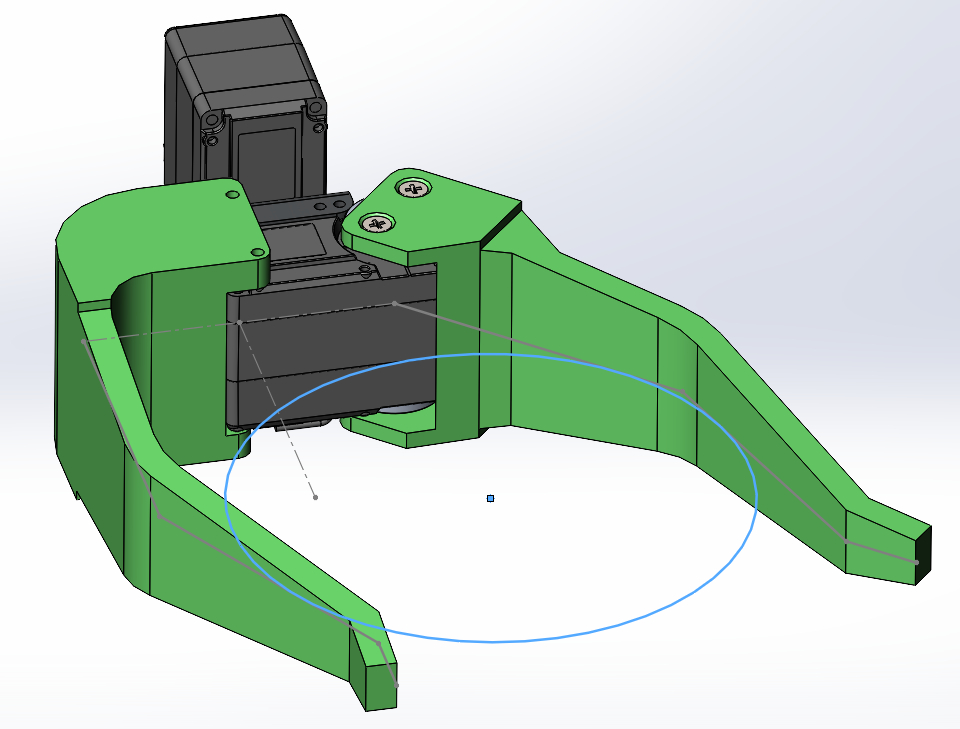
深度相机
夹爪要与深度相机配合使用,因此在下一阶段增加了一块用于安装相机的安装板。
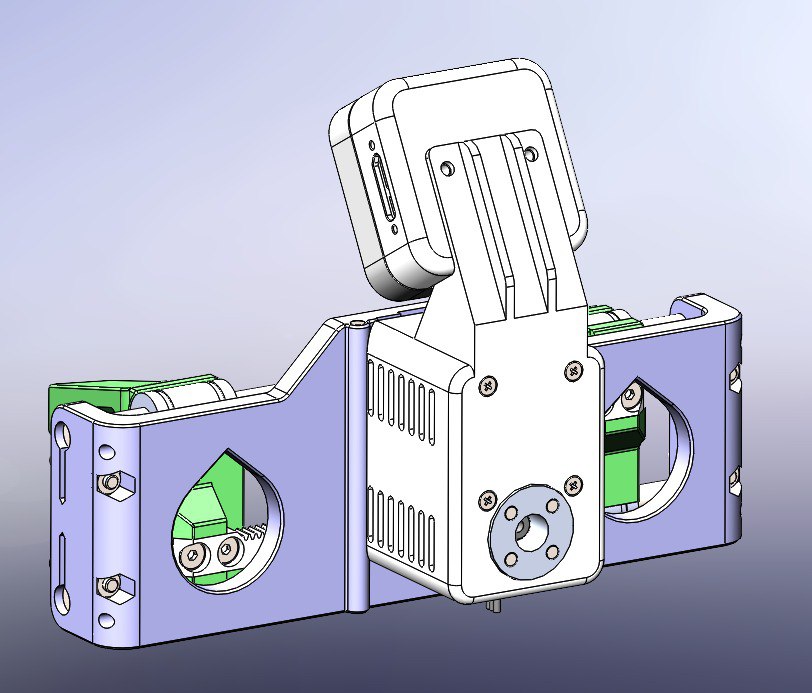
深度相机安装座
相机以 45 度角安装,以获得尽可能宽的工作视野。机器学习控制模型借助它来精确确定待抓取物体的尺寸、所需的抓取力以及所需的夹爪张开宽度。它是安装在夹爪上的唯一传感器。
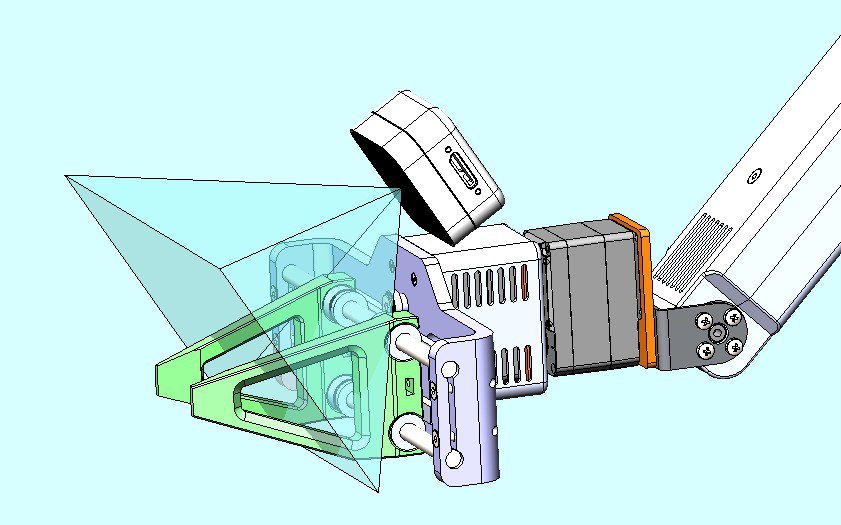
深度相机视角
到这一步,我们暂停了进一步的设计工作,转而开始组装原型,以发现当前设计中存在的实际问题。部分元件是从 AliExpress 订购的。
物料清单
电子元件
| 项目 | 说明 | 数量 | 供应商链接 | 价格 | 备注 |
| ST3215 Servo | Waveshare Servo Motor STS3215 | 1 | Amazon – Waveshare STS3215 Servo | $28.99 | 带反馈的高精度总线舵机 |
| Bus Servo Adapter | Waveshare Bus Servo Adapter Board | 1 | Amazon – Bus Servo Adapter A | $10.99 | TTL/RS485 通信接口 |
机械零件
| 项目 | 说明 | 数量 | 供应商链接 | 价格 | 备注 |
| MR106ZZ | 滚珠轴承 10×6×3 mm | 2 | Amazon – ACROPIX MR106ZZ Bearings (10pcs) | $5.49 (10pcs) | 密封式,预润滑 |
| LM6UU | 直线轴承 6×12×19 mm | 4 | Amazon – uxcell LM6UU Bearings (4pcs) | $8.99 (4pcs) | 用于平稳的直线运动 |

钢导轨与直线轴承
Rods
| 项目 | 说明 | 数量 | 供应商链接 | 价格 | 备注 |
| Steel Rod | 不锈钢轴 6mm × 150mm | 2 | Amazon – uxcell Stainless Steel Rod 6mm×150mm (5pcs) | $8.39 (5pcs) | 高精度,耐腐蚀 |
3D-Printed Parts
| Part Number | 说明 | 数量 | 材料 | 打印设置 |
| RB9.01.060.010 | 主框架 | 1 | PLA/PETG | 0.2mm layer, 20% infill |
| RB9.01.060.020 | 夹持件 | 2 | PLA/PETG | 0.2mm layer, 20% infill |
| RB9.01.060.030 | 齿条 | 2 | PLA/PETG | 0.15mm layer, 30% infill |
| RB9.01.060.040 | 驱动齿轮 | 1 | PLA/PETG | 0.15mm layer, 30% infill |
3D 打印说明
- 材料:原型制作推荐使用 PLA,量产使用推荐 PETG
- 层高:0.15-0.2mm 以获得最佳表面质量
- 填充率:齿轮建议使用更高的填充率(30%)以确保强度
- 支撑:是否需要取决于打印时的摆放方向
- 后处理:轴承配合处可能需要轻微打磨
螺钉
| 项目 | 说明 | 数量 | 标准 | 价格 | 备注 |
| M3×10 | 沉头螺钉 | 4 | Amazon – M3×10 沉头螺钉s | $6.39 (100pcs) | 用于固定齿条 |
| M3×20 | 沉头螺钉 | 4 | Amazon – M3×20 沉头螺钉s | $6.99 (100pcs) | 用于将夹持件固定到导轨上 |
| M4×8 | 沉头螺钉 | 2 | Amazon – M4×8 沉头螺钉s | $9.99 (100pcs) | 用于固定主框架轴承 |
螺母
| 项目 | 说明 | 数量 | 标准 | 价格 | 备注 |
| M3 | 六角螺母 | 4 | Amazon – M3 六角螺母s | $5.99 (100pcs) | 用于夹持件组装 |
舵机紧固件
| 项目 | 说明 | 数量 | 来源 | 价格 | 备注 |
| 自攻螺钉 | 舵机安装螺钉 | 4 | 舵机套件 | 已包含 | STS3215 随附 |
| 舵盘 | 输出轴适配器 | 1 | 舵机套件 | 已包含 | STS3215 随附 |
| 安装螺钉 | 舵盘固定螺钉 | 1 | 舵机套件 | 已包含 | STS3215 随附 |
成本估算
| Category | 估算成本(USD) |
| 电子元件 | $39.98 |
| 机械零件 | $22.87 |
| 3D 打印材料 | $5-10 |
| 紧固件 | $1.60 (approximate) |
| 合计 | $69.45-74.45 |
成本依据 Amazon 在当前日期——2025 年 6 月 6 日的价格计算。大批量采购可在紧固件上节省可观的成本。
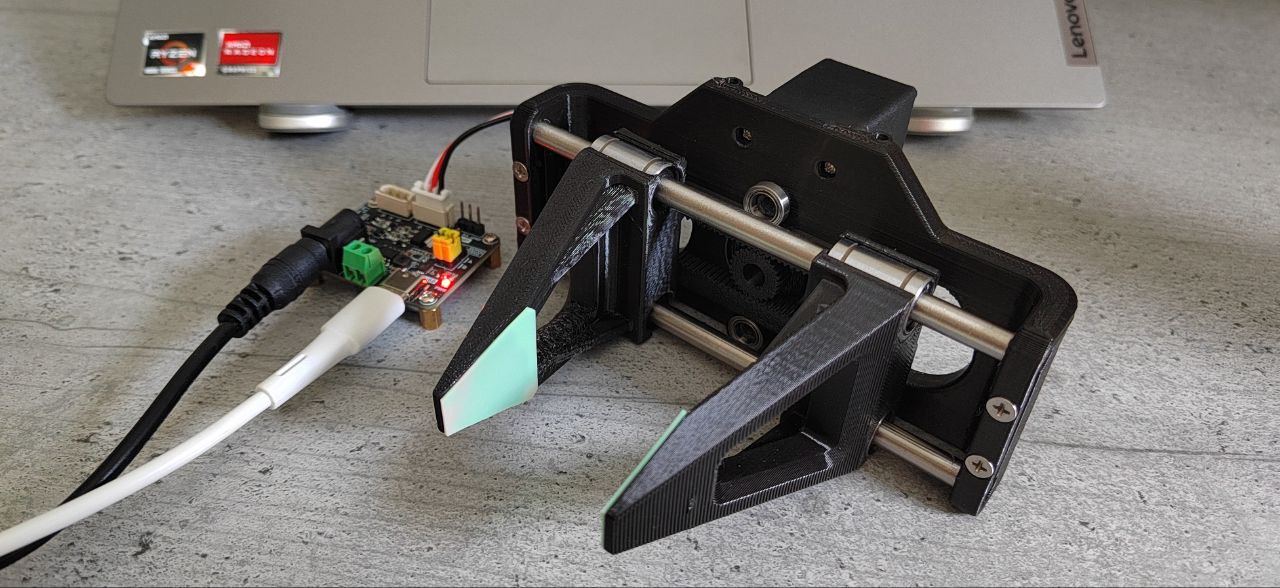
组装
在组装第一个版本时,其中一只夹爪的打印出了问题,因此第一次测试只用了一只夹爪进行。
几天后,第二只夹爪到货,我们得以进行完整测试。
工程师加上了硅胶垫,以便更好地抓握物体。同样是这个第一版,已作为开源项目发布在我们的 GitHub 上:
https://github.com/roboninecom/3D-Printed-Parallel-Gripper-for-Robotics-Arms
社区反馈
Hadassah Freedman:
“我想知道你们是否考虑过这套设计如何应对更重的负载,尤其是在齿条根部和夹爪转轴附近。或许在这些部位加上圆角,有助于降低应力集中、避免 FDM 打印件分层,从而让该设计能够更长时间、更频繁地承受更重的负载。我看到齿条底座有不错的厚度,但在向竖直齿牙过渡处没有明显的圆角,这可能成为应力集中点;夹爪转轴处也看不到用来平滑从转轴销到侧壁载荷路径的圆角。我很想进一步了解它的能力。”
Joy Kariya:
“我看了一遍仓库,有个建议:你们为什么不在夹爪两侧都加上限位开关,这样就不再依赖延时,而是在物体被夹住时立即停止。这样它也能抓取小物体了。”
集成限位开关的夹爪
打印参数能不能再细化一点 我用0.2层高打的连杆孔位有点紧装不进轴
孔位偏紧通常是热胀和挤出过量造成的。建议把孔做0.1到0.2mm的余量补偿,或者在切片里开启孔洞水平扩展补偿,我们会在文档里补充推荐的公差和切片设置。
请问你们这个夹爪的连杆是用什么材料3D打印的 PLA够刚吗还是得上PETG或者尼龙
原型用PLA验证结构,实际使用建议PETG或尼龙。PLA刚度够但偏脆且不耐温,长期受力的连杆件用PETG更稳妥,受力大的关键件可以考虑尼龙加碳纤。
非常感谢解答。
打印出来装好了 很顺滑 给设计师点赞
设计思路清晰,文档详细,照着做一遍受益匪浅。
想自己做但是没有3D打印机 哭
这个设计我改成气动的了 效果也不错 感谢提供基础结构
夹持力。够用。结构。偏复杂。
想问下夹爪和机械臂法兰怎么对接的 有标准接口吗还是得自己改适配
我们用的是常见的法兰螺孔阵列,文档里给了接口尺寸图。如果你的机械臂法兰不一样,可以打印一个转接板适配,STEP文件都开放,改起来很快。
非常感谢解答。
好东西 已经fork到我的项目里了 改改就能用
蜗轮蜗杆自锁那个细节很赞 断电也不会松开掉东西
请问这个夹爪自重多少 我的机械臂末端负载有限 太重的夹爪会吃掉本来就不多的负载
当前版本含舵机约180克。如果你末端负载吃紧,可以把结构件换成镂空版或者用更小的舵机,我们也在做一个轻量化版本目标控制在120克以内。
这种把整套设计文件都放出来的做法真的很值得尊敬,我之前找了很多开源机械臂的夹爪方案,要么只放个渲染图吊人胃口,要么源文件残缺不全根本打不出来,你们这套从step到打印参数到BOM都齐全,照着做一遍就能跑起来,对我们这种自学的太友好了,希望能一直坚持开源下去
结构简洁 维护方便 这点很加分
开源就是好 直接下载图纸打印 省了我重新设计的功夫 yyds
看了好几个开源夹爪方案 还是觉得你们这个最均衡 不像有的为了炫技搞得特别复杂 实际打印组装一堆坑 你们这个就很务实 零件少 装配快 关键是真的能用 给点赞
成本控制得不错 整套算下来比买成品便宜太多了
这设计绝了!! 自适应夹持那块太聪明了 不规则的东西也能稳稳抓住
3d打印夹爪强度还是差点意思 重一点的东西就变形 但是DIY嘛 能用就行
太棒了 终于找到一个文档齐全的开源夹爪了!!! 马上开干
请问驱动这个夹爪用什么舵机比较合适 普通的SG90够吗还是得上总线舵机
SG90力矩太小且没有位置反馈,只能做最简单的开合。建议用带反馈的总线舵机比如STS3215,可以做力控和位置控制,夹持效果和可玩性都好很多。
舵机驱动的夹爪力反馈怎么做 你们有加电流采样吗
有,我们通过读取舵机的电流反馈来估算夹持力,达到设定阈值就停止收紧。这种方式精度一般但成本低,对抓取易碎物体已经够用了。
感谢详细的回答。
想问一下夹爪的开合行程是多少 我要抓的东西从很小的螺丝到比较大的水杯都有 一个夹爪能覆盖吗
当前版本最大开口约80mm。从小螺丝到水杯跨度太大,单一夹爪很难兼顾,建议换不同尺寸的指尖,我们预留了指尖快换接口正好应对这种场景。
平行夹爪和自适应夹爪到底哪个更实用 纠结好久了 求博主从实际使用角度给点建议
看用途。要精确定位、抓规则刚性件选平行夹爪;抓形状多变或易损物选自适应。如果是做通用桌面机械臂玩,自适应更省心;做装配类任务平行更靠谱。
夹爪结构设计得真巧妙 平行夹持那个连杆机构学到了
指尖那个硅胶垫是怎么固定的 我打印完发现抓光滑表面老打滑
指尖留了浅槽,硅胶垫用软胶或者直接灌注硅胶成型固定。抓光滑面打滑的话可以换摩擦系数更高的硅胶硬度,或者在指面做点微凸纹理增加抓持力。
正是我需要的。