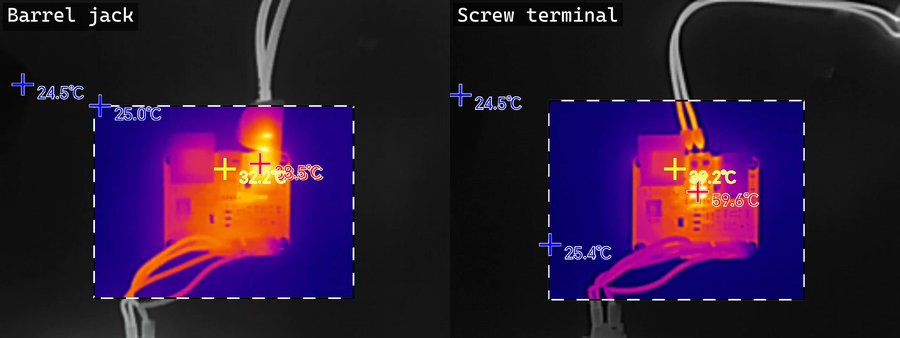
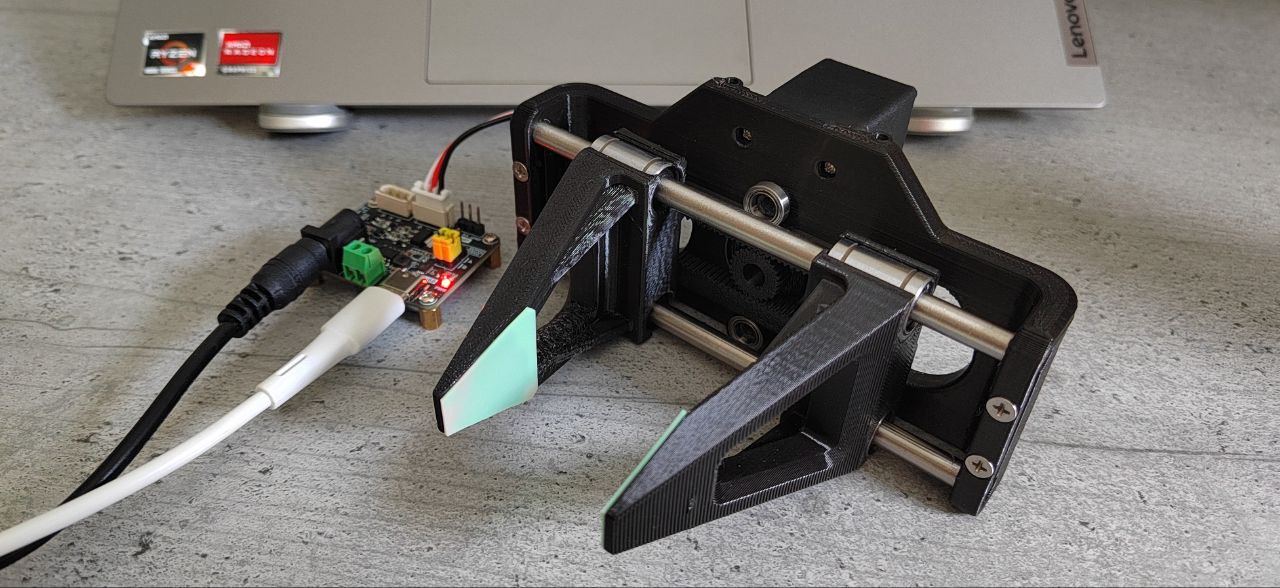
Test von Waveshare-Bus-Servotreiber-Platinen unter Last
Empirischer thermischer Lasttest zweier Waveshare-Bus-Servotreiber-Platinen in vier Szenarien (2 A /...
Boris Kotov
03 May 2026
Empirischer thermischer Lasttest zweier Waveshare-Bus-Servotreiber-Platinen in vier Szenarien (2 A /...
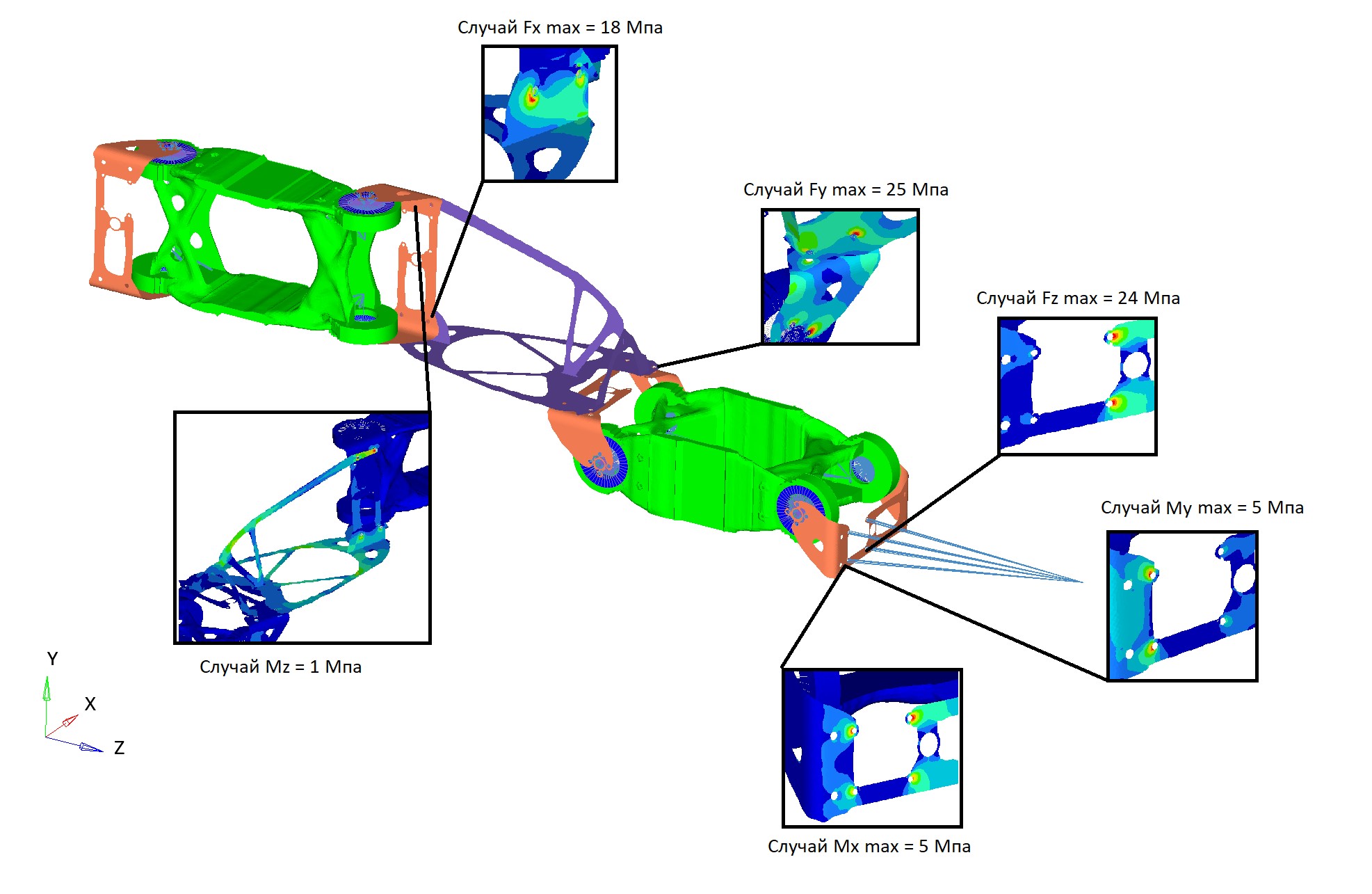
Diese Studie stellt die Topologieoptimierung eines Robotermanipulators mit dem SIMP-Algorithmus vor,...

Umfassende empirische Bewertung des Feetech-STS3250-Bus-Servomotors. Die Tests zeigen eine Abweichun...

Ein detaillierter Blick auf den Feetech-STS3215-Servo – seine reale Leistung, Präzision und sein Reg...
Ein Greifer ist ein mechanisches oder robotisches Gerät, das zum Greifen, Halten, Manipulieren oder ...
Ich möchte erläutern, wie die Auswahl der wichtigsten Komponente des Robotermanipulators – der Elekt...
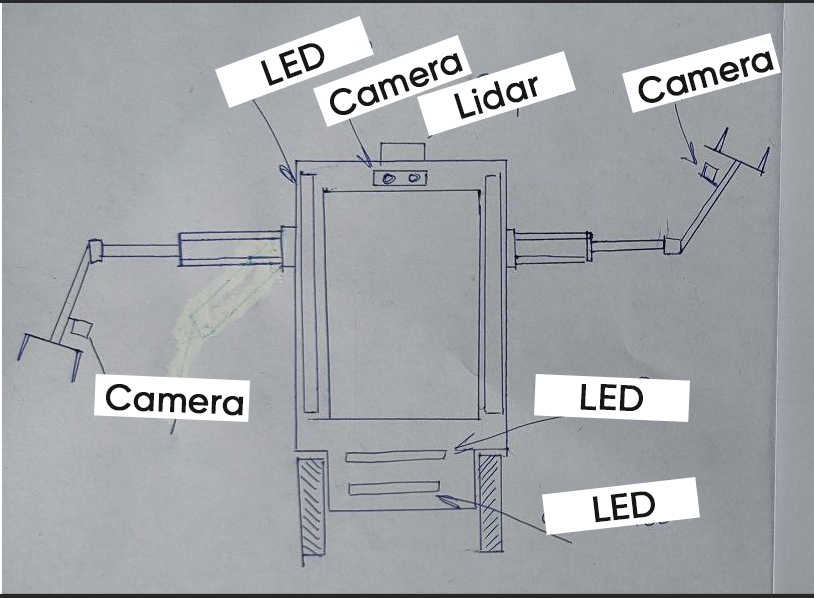
Im Mai haben wir die erste Variante des Robo-9-Designs fertiggestellt und seine Entwicklung vom erst...
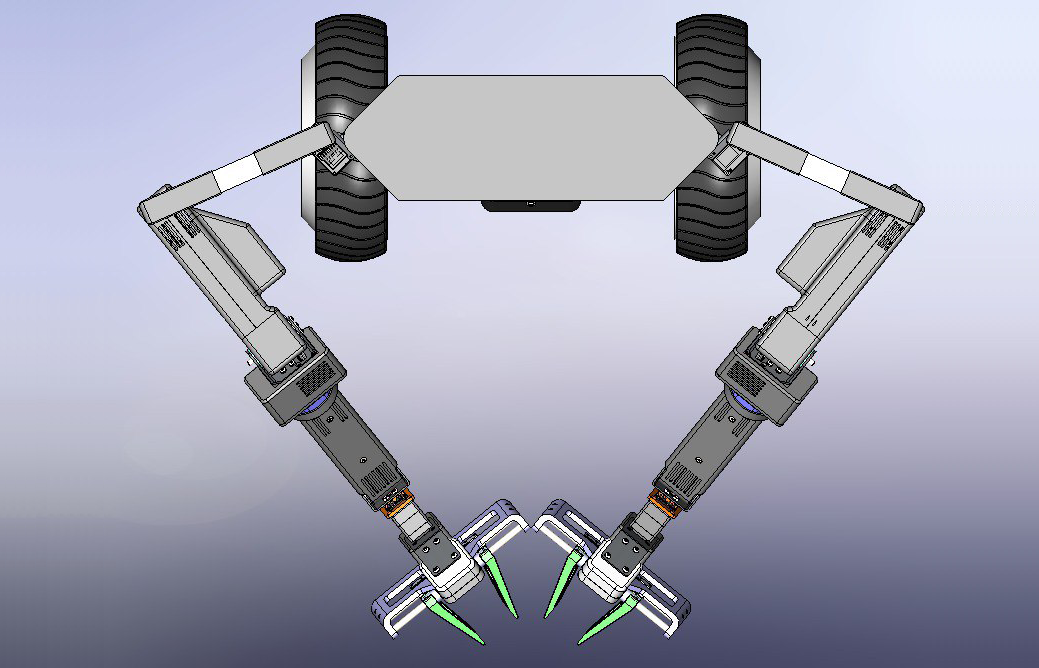
In den letzten zwei Monaten haben wir den Forschungsroboter Robo 9 weiterentwickelt und seine Strukt...
ALOHA 2 durchbricht dieses Paradigma. Es ist nicht nur ein weiteres Forschungsprojekt, sondern ein m...
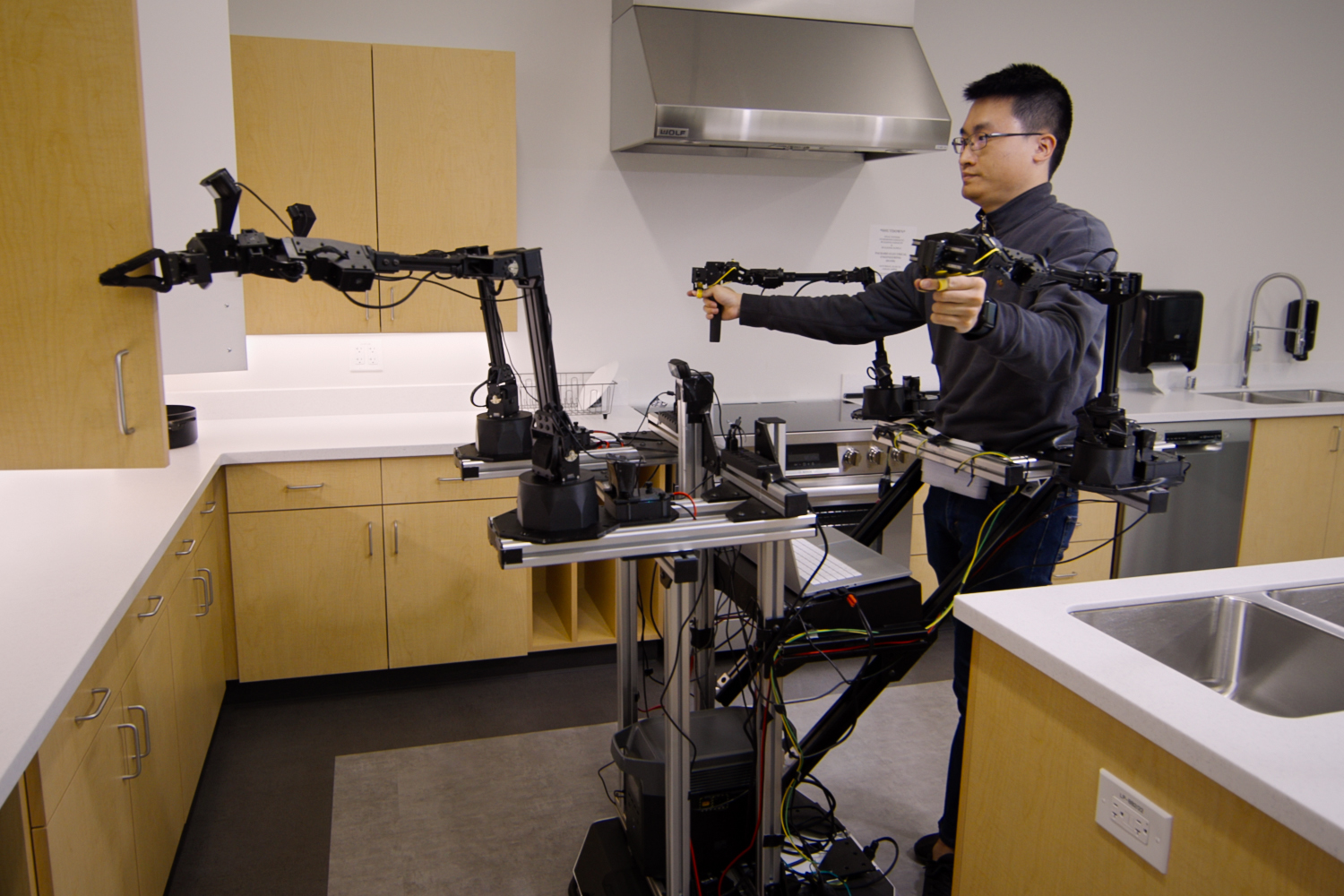
Das Projekt Mobile ALOHA, entwickelt von einem Team der Stanford University in Zusammenarbeit mit de...
Wir schätzen deine Privatsphäre
Wir verwenden Cookies, um dein Surferlebnis zu verbessern, personalisierte Anzeigen oder Inhalte bereitzustellen und unseren Traffic zu analysieren. Du kannst alle akzeptieren, nicht notwendige ablehnen oder auswählen, welche Cookies du zulässt. Datenschutzerklärung
Cookie-Einstellungen verwalten
Für den Betrieb der Website erforderlich und nicht abschaltbar.
Helfen uns zu verstehen, wie Besucher die Website nutzen.
Dienen dazu, relevante Anzeigen auszuspielen und deren Leistung zu messen.
Ermöglichen erweiterte Funktionen und Personalisierung.