Тестирование сервомотора Feetech STS3215: люфт, повторяемость и момент
 13717
13717

В сентябре мы перешли к более детальному этапу тестирования сервомоторов перед началом программирования контроллера. Мы начали тестировать Feetech STS3215 C018 (передаточное отношение 1:345, 12 В, момент заклинивания 30 кг·см) — популярный сервомотор, широко используемый в open-source робототехнических проектах, таких как SO-ARM100 и Robonine parallel gripper. Эта статья в основном посвящена его характеристикам. Для начала рассмотрю данные производителя. Эти значения послужат базой для наших поверочных тестов. На некоторых изображениях показан Waveshare STS3215, который технически очень похож — вплоть до той же версии прошивки.

Магнитный энкодер 12 бит
Feetech STS3215 оснащён 12-битным магнитным энкодером, дающим 4096 шагов на 360° поворота (0,088° на шаг). Эта магниторезистивная конструкция исключает фрикционный износ по сравнению с потенциометрическими энкодерами со скользящими контактами, которые деградируют со временем. Отсутствие подвижных контактных поверхностей обеспечивает надёжное управление с обратной связью и стабильную долговременную работу без деградации энкодера.

Feetech STS-3215: обратная сторона и шестерни
Сервопривод оснащён многоступенчатым металлическим редуктором, рассчитанным на высокий выходной момент в доступном корпусе. Согласно the datasheet, редуктор по спецификации имеет люфт ≤ 0,5°, что типично для этого класса сервоприводов. Вместо пластиковых используются металлические шестерни, выдерживающие длительные нагрузки и повторяющиеся циклы движения. Энкодер интегрирован до ступени редуктора для прямой обратной связи от двигателя. Редуктор использует передаточное отношение 1:345, позволяя сервоприводу преобразовывать скорость двигателя в высокий выходной момент, пригодный для робототехники. Высокое передаточное отношение и металлический редуктор делают этот сервопривод непригодным для приложений с обратным приводом, так как внешние силы легко проворачивают шестерни, вызывая неконтролируемое движение и возможное повреждение двигателя.
График рабочей области отображает official datasheet значения выходной мощности, скорости вращения, КПД и потребляемого тока при нагрузках от 0 до 30 кг·см. Скорость линейно падает с ростом нагрузки, а выходная мощность достигает пика около 15 кг·см, после чего снижается при больших нагрузках. КПД достигает максимума (примерно 26%) в диапазоне 6–9 кг·см, что типично для доступных сервомоторов. Потребление тока растёт линейно с ростом требуемого момента во всём рабочем диапазоне. Эти паспортные характеристики показывают, что несмотря на скромный КПД, присущий бюджетным конструкциям, сервопривод обеспечивает надёжное управление мощностью, подходящее для бюджетных робототехнических и автоматизационных задач.
Тест скорости и точности
Сервопривод Feetech STS-3215 тестировался на 100% и 50% номинальной скорости. Измерения показали максимальную скорость около 46 об/мин с точностью ±2% и колебаниями около 7%. Хотя на низких скоростях наблюдались незначительные колебания, в целом движение оставалось стабильным и соответствовало характеристикам производителя.
Эти результаты подтверждают, что номинальная скорость холостого хода 0,22 с/60° хорошо согласуется со значениями даташита, обеспечивая достаточную скорость и отзывчивость для робототехники и систем управления движением.
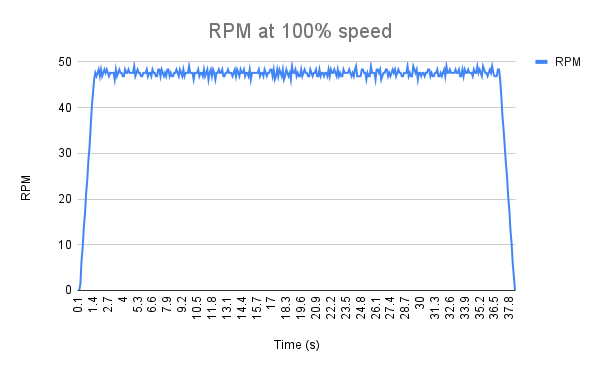
Настройка 100% скорости. Измеренное среднее 45,6 об/мин с типовым отклонением 0,48 об/мин.
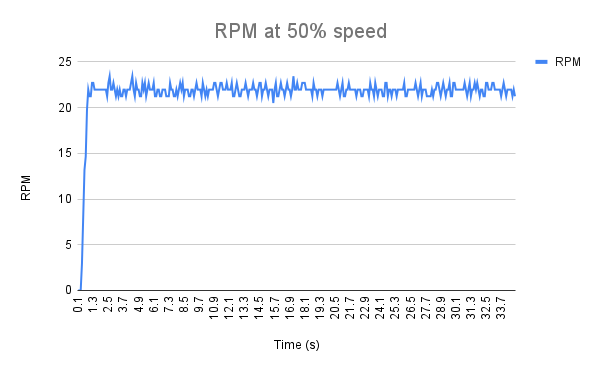
Настройка 50% скорости. Измеренное среднее 21,9 об/мин с типовым отклонением 0,34 об/мин.
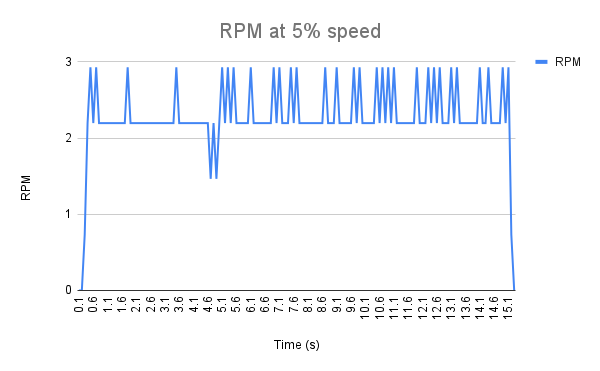
Настройка 5% скорости. Измеренное среднее 2,3 об/мин с наблюдаемым разбросом около 0,25 об/мин.
Измерение люфта
Одна из ключевых характеристик, заставивших нас пересмотреть конструкцию манипулятора, — люфт. С помощью индикатора часового типа мы сначала измерили линейное перемещение 1,3 мм на конце плеча длиной 86 мм. По этому мы рассчитали угловой люфт 0,0151 радиан (≈ 0,87°) — заметно выше предела 0,5°, указанного в даташите. Это отклонение довольно существенно, поскольку даже малые угловые ошибки в суставе превращаются в миллиметровые смещения на конце руки.
В стенде использовалась резинка, создающая натяжение около 30 г для постоянной нагрузки, а индикатор часового типа измерял возникающее перемещение. Этот метод давал стабильные показания без избыточного усилия или зависимости от момента.
Более того, часть этого люфта, по-видимому, вызвана программно: есть встроенная мёртвая зона в 10 отсчётов энкодера, то есть двигатель игнорирует малые команды в этом диапазоне. Люфт также проявляется как дрожание или колебания при вытянутой руке — сервопривод с трудом точно возвращается в целевое положение, что приводит к заметной вибрации.
Тест повторяемости
Другой важный параметр — повторяемость. Тест повторяемости сервопривода Feetech STS3215 проводился с вертикальным плечом 10 см, с шагом 20 шагов, тремя циклами в каждом направлении и тремя полными итерациями. Результаты указывают на стабильную работу в контролируемых условиях.
Параметры теста и результаты:
- Конфигурация плеча: вертикальное плечо 10 см
- Метод теста: шаг 20 шагов; 3 цикла в каждом направлении; 3 полных итерации
- Измеренное отклонение наконечника: ±0.3 mm
- Эквивалентная угловая повторяемость: ≈ 0.17° (≈10 arcmin)
- Разрешение энкодера: 12-bit = 0.088°
- Линейный эквивалент одного отсчёта энкодера (при радиусе 10 см): ≈ 0.153 mm
- Наблюдаемое отклонение: ≈ 2 encoder counts
- Notes: пружинный щуп компенсирует механический люфт; тест можно уточнить или повторить под нагрузкой для повышения точности
Измеренное среднее абсолютное отклонение положения — около 2 шагов энкодера, или 0,17 градуса
Это указывает, что хотя измеренная повторяемость укладывается в несколько шагов энкодера, сервопривод STS3215 сохраняет стабильное поведение позиционирования, а дальнейшее уточнение могло бы подтвердить его характеристики под рабочей нагрузкой.
Тест крутящего момента
Мы также провели динамический тест момента сервопривода Feetech STS-3215 с разными нагрузками для оценки его реальной работы в движении.
Конфигурация теста:
- плечо 10 см
- Испытательные нагрузки: 1 кг, 1,5 кг и 2 кг
Результаты теста:
- При нагрузке 1,5 кг: сервопривод сохранял стабильную работу с ростом температуры примерно на 15 °C после 10 минут непрерывного движения
- При нагрузке 2 кг: сервопривод входил в защиту от перегрузки после нескольких циклов, временно ограничивая выходной момент для предотвращения повреждения
- Характеристики оставались стабильными примерно до 15 кг·см, близко совпадая с номинальным моментом из даташита
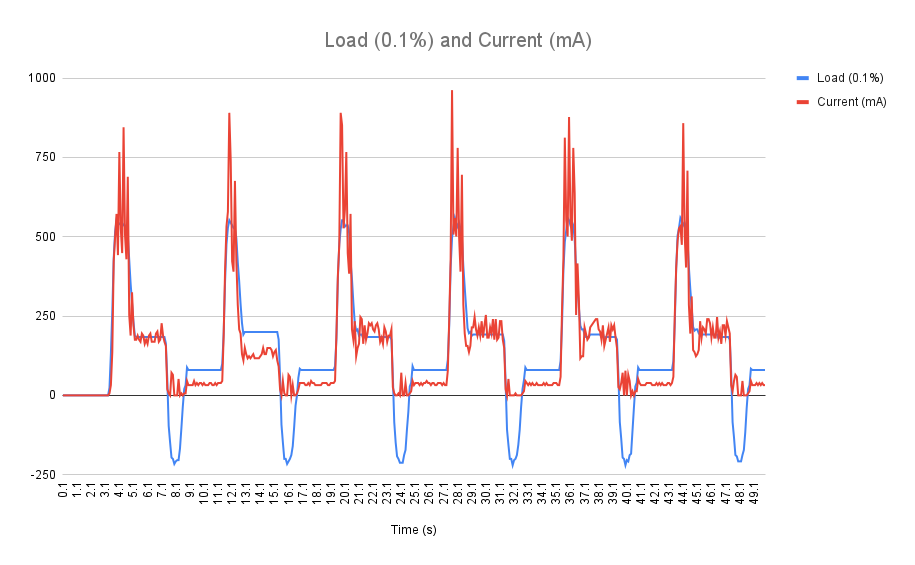
Динамический тест момента при нагрузке 10 кг·см показывает, что потребление тока остаётся существенно ниже 1 А, а внутренняя оценка нагрузки немного превышает 50%
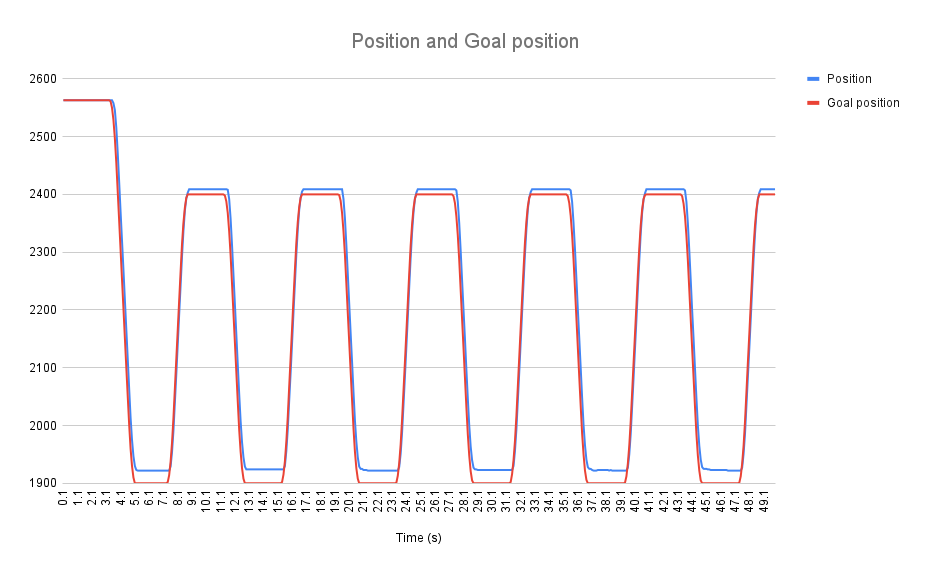
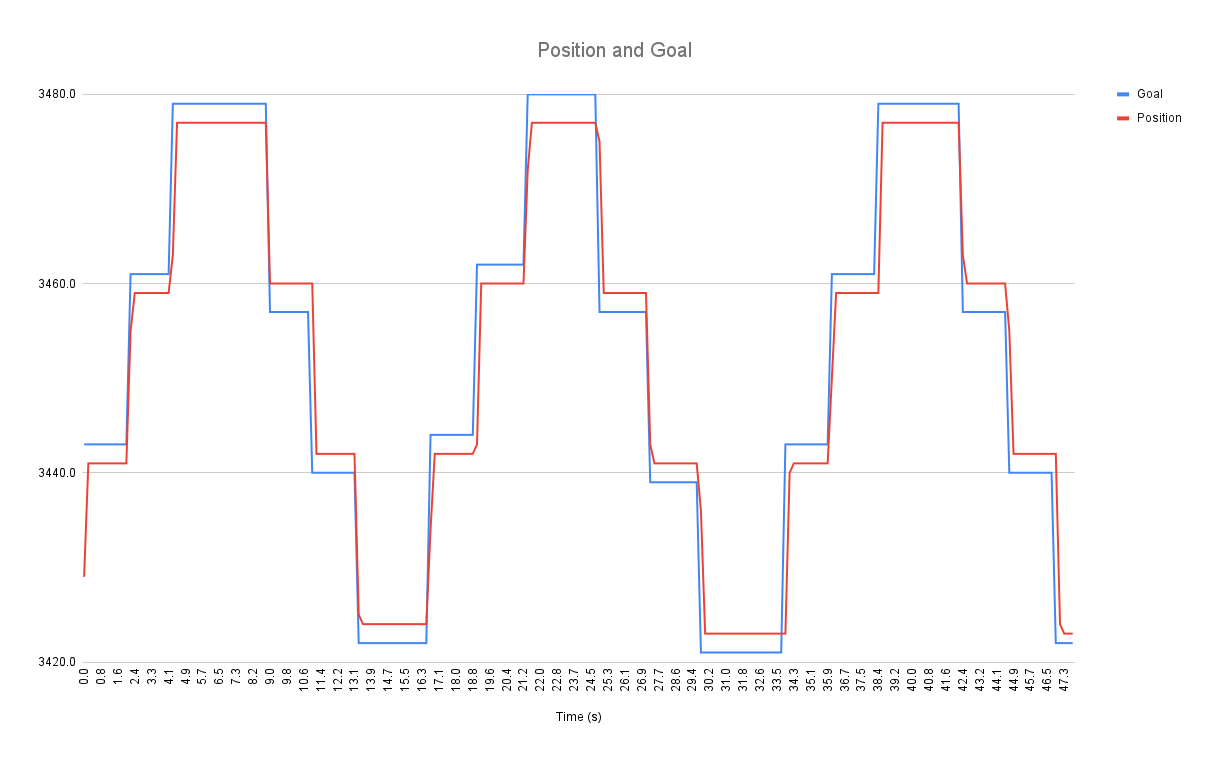
В динамическом тесте при нагрузке 10 кг·см измеренное среднее абсолютное отклонение положения составило 22,5 шага энкодера, что соответствует примерно 2 градусам
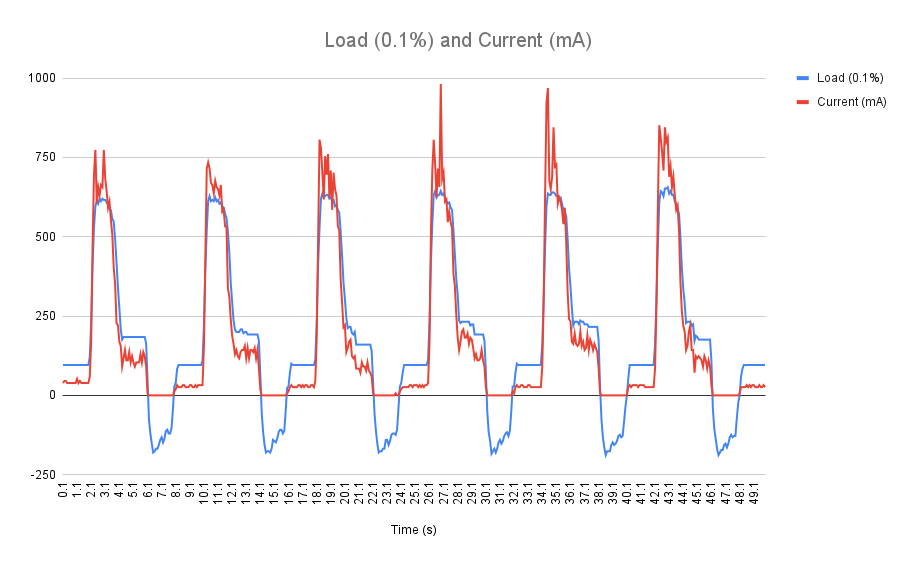
При нагрузке 15 кг·см в динамическом тесте внутренняя оценка нагрузки указывает на небольшой остаточный запас, а потребление тока остаётся в ожидаемом диапазоне
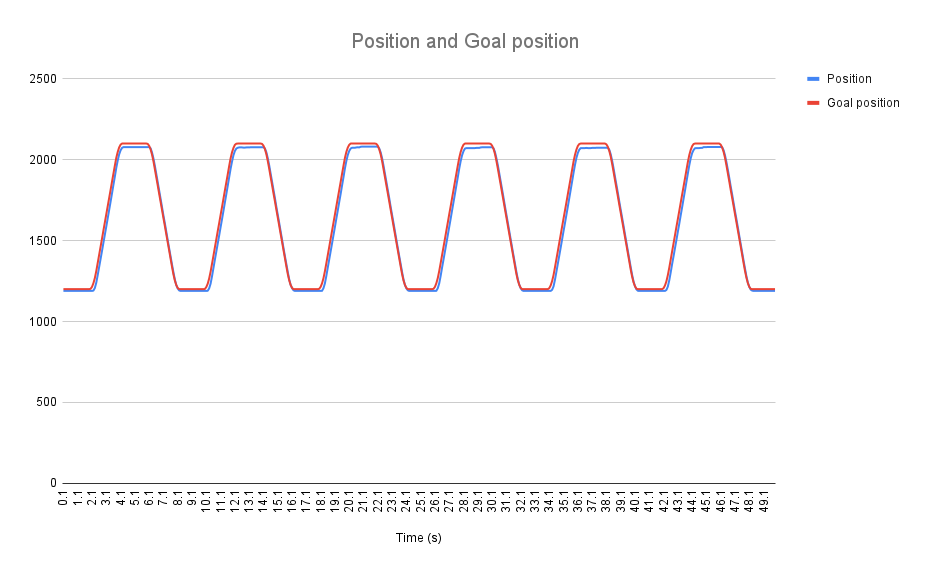
При нагрузке 15 кг·см в динамическом тесте измеренное среднее абсолютное отклонение положения — 30 шагов энкодера, или около 2,6 градуса.
Этот тест демонстрирует способность сервопривода к динамическому моменту и эффективность его механизмов тепловой и перегрузочной защиты. Длительная работа на максимальном номинальном моменте может ускорить механический износ.
Далее мы исследовали момент заклинивания — максимальный момент, который двигатель может удерживать в статике без движения.
Конфигурация теста:
- плечо 10 см, установленное под углом 45°
- Статическая нагрузка: примерно 3,5 кг (≈ 35 кг·см момента)
Результаты теста: При длительной тяжёлой нагрузке сервопривод иногда входил в режим защиты от перегрузки, снижая выходной момент примерно до 20% номинала. И таймаут защиты, и безопасный предел момента настраиваются через регистры контроллера, позволяя точно подстроить поведение защиты под конкретные задачи. Измеренный момент заклинивания немного превысил значение даташита 30 кг·см, подтверждая, что при правильной настройке STS-3215 работает выше своей номинальной спецификации.
Температура под постоянной нагрузкой
Test 1: Проверка перегрева при удержании статической нагрузки.
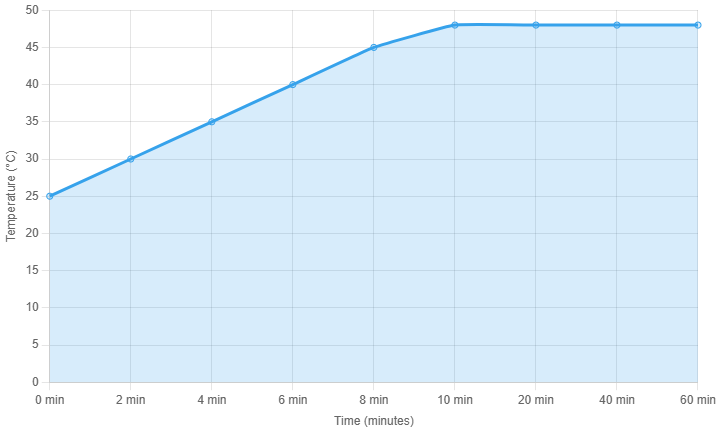
Тест перегрева под статической нагрузкой. Feetech STS3215
Рука с гантелью была установлена горизонтально, удерживая груз 1 кг на плече 15 см, что даёт момент 15 кг·см. За 10 минут температура поднялась до 48 °C и оставалась стабильной в течение часа без дальнейшего роста.
Тест 2: Колебания в диапазоне ±90 градусов. Измерение температуры
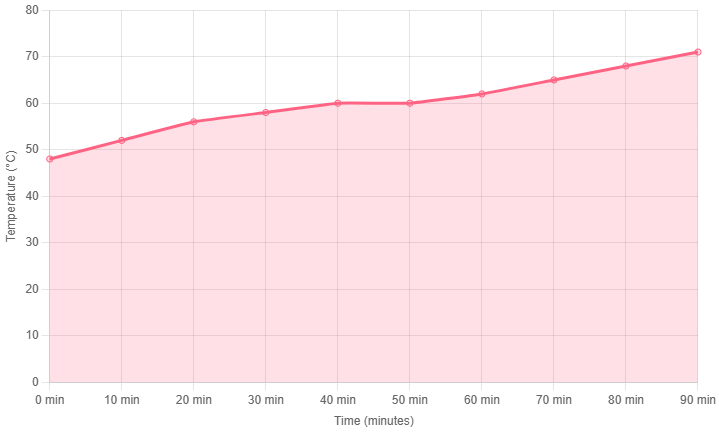
Колебания в диапазоне ±90 градусов. Тест температуры. Feetech STS3215
Начав с 48 °C, температура достигла 60 °C через 50 минут. Следующие 20 минут температура не росла. Затем скорость колебаний снизили, чтобы ускорить нагрев (см. примечание ниже). Потребовалось ещё 40 минут, чтобы достичь 71 °C, после чего двигатель перегрелся.
- Критический температурный порог: при 71 °C двигатель начинает сбоить, как наблюдалось в экспериментах вчера и сегодня (два случая). Встроенной тепловой защиты, по-видимому, нет, поэтому при достижении этой температуры потребуется ручное отключение.
- Влияние ускорения на нагрев: снижение ускорения увеличивало скорость роста температуры. Сначала, при ускорении 5, температура достигла 60 °C. Снижение ускорения до 2 привело к перегреву через дополнительное время. Завтра в следующих тестах мы измерим время до перегрева при ускорении 5, так как ускорение 2 слишком медленное для нашего применения.
Эксперимент по компенсации люфта
Дополнительный эксперимент, проведённый нашим инженером-программистом Борисом, был посвящён компенсации люфта с помощью схемы предварительного натяжения из двух сервоприводов. В этом тесте два сервопривода Feetech STS-3215 были установлены с напечатанными на 3D-принтере плечами из PETG, соединёнными натянутой верёвкой. Каждый сервопривод создавал небольшой преднатяг, эффективно устраняя механический люфт в звене.
Схема проста, но очень наглядно демонстрирует, как предварительное натяжение устраняет люфт на практике. Когда оба сервопривода создавали встречное натяжение, руки оставались полностью неподвижными, подтверждая, что механический люфт полностью скомпенсирован. Этот метод значительно повышает стабильность и точность позиционирования, что особенно полезно для роботизированных суставов, систем управления движением и DIY-проектов автоматизации.
Ключевые моменты:
- Два сервопривода STS-3215 с плечами из PETG
- Верёвочное звено под контролируемым преднатягом
- Демонстрирует устранение механического люфта за счёт компенсации преднатягом
Сводка характеристик и результатов тестов
| Параметр / метод теста / условие | Измеренный результат | Спецификация / значение даташита | Примечания / комментарии |
|---|---|---|---|
| Рабочее напряжение | 12 V | 12 V | Рабочий диапазон: 4–14 В |
| Статический момент (заклинивания) Плечо 10 см под углом 45° на весах | ~3.5 kg (35 kg·cm) | 30 kg·cm | Немного выше номинала; входит в защиту при длительной нагрузке |
| Динамический момент Подъём 1,5 кг на плече 10 см | Держит нагрузку с ростом +15 °C | — | Температура выросла на +15 °C за 10 мин; перегрузка сработала при нагрузке 2 кг |
| Скорость холостого хода (об/мин) Измерено на 100% и 50% скорости | Макс. ~46 об/мин; точность ±2%; колебания ~7% | 45 RPM (0.22 s/60°) | Стандартные настройки; работа слегка неплавная, но приемлемая |
| Разрешение энкодера Чтение регистра по UART | 4096 шагов на оборот (12 бит) | 12-битный магнитный энкодер (4096) | 0,088° на шаг |
| Люфт редуктора (свободный ход) Измерение свободным вращением рукой (метод индикатора часового типа) | ~ 0,87° | ≤ 0.5° | — |
| Ошибка позиционирования под нагрузкой Нагрузка 1,5 кг, плечо 10 см, угол 45° | 20–30 значений энкодера (1,8–2,6°) | — | Ошибка существенно возрастает под нагрузкой |
| Повторяемость (индикатор часового типа) Вертикальное плечо 10 см; шаг 20 шагов; 3 цикла в каждом направлении; 3 итерации | Отклонение ±0,3 мм в точках измерения | — | Пружинный щуп компенсирует механический люфт; тест можно уточнить или провести под нагрузкой |
| Рост температуры (тест статической нагрузки) — нагрузка 1 кг на плече 15 см (≈15 кг·см момента); рука установлена горизонтально | Температура поднялась до 48 °C за 10 мин и оставалась стабильной >1 ч без дальнейшего роста | Рабочий диапазон температур: –10 °C – 60 °C | Стабильный тепловой режим под статической нагрузкой; в пределах номинальных ограничений |
| Рост температуры (тест колебаний) — диапазон ±90°; непрерывное движение; начальная температура 48 °C | Достигла 60 °C через 50 мин, стабилизировалась на 20 мин, затем поднялась до 71 °C через ~110 мин, что привело к перегреву | Порог защиты от перегрева: 70 °C | Активного теплового отключения не наблюдалось — около 70 °C требуется ручное отключение. Снижение ускорения увеличивало скорость нагрева (accel = 2 → перегрев; accel = 5 → стабильно ~60 °C). |
| Интерфейс связи | UART TTL, полудуплекс | Работает | 38400 бит/с – 1 Мбит/с (по умолчанию 1 Мбит/с); последовательное подключение нескольких сервоприводов |
| Управление с обратной связью | Обратная связь по положению и скорости работает надёжно | — | Поддерживает удержание положения и управление скоростью |
| Телеметрия / обратная связь | Считывание по UART: положение, скорость, ток, напряжение, нагрузка, температура | — | Доступна полная телеметрия |
| Системы защиты | Перегрузка, перегрузка по току, перенапряжение, пониженное напряжение, перегрев | Работает | Настраиваемые таймаут и безопасные пределы через регистры |
| Мёртвая зона прошивки | Командный ввод < 10 шагов энкодера | Движение не наблюдается | Встроенная мёртвая зона 10 отсчётов |
| Цена / аксессуары | — | ~$15 (сервопривод) + ~$5 (адаптер UART) | Отличное соотношение цена/качество |
Итоги
Feetech STS3215 демонстрирует хорошие характеристики момента и стабильную связь по UART, что подходит для робототехнических и автоматизационных задач среднего уровня. Однако механический люфт и заданная прошивкой мёртвая зона (10 отсчётов энкодера) снижают точность позиционирования для задач тонкого движения.
Основные преимущества
- Компактный и лёгкий
- Встроенное управление с обратной связью (положение и скорость)
- Встроенная телеметрия и функции защиты
- Простая настройка параметров и протокол UART
- Поддержка последовательного подключения нескольких сервоприводов
- Достаточная точность энкодера (4096 шагов)
- Может управляться напрямую с ПК или микроконтроллера
Основные ограничения
- Люфт редуктора выше заявленного
- Прошивка не обновляется пользователем
- Требует длительных нагрузочных тестов на долговременный износ
- Заметный механический шум
а repeatability в градусах или в шагах энкодера считали?
Мы приводили результат в градусах на выходном валу, пересчитав из дискрет 12-битного магнитного энкодера. Так нагляднее для практических задач.
вот ЛЮФТ для меня тут решающий, всё остальное вторично
тестил такой же, у меня разброс был побольше но в целом согласен
а вы прошивку обновляли перед тестом? на старой пид настроен иначе и люфт по ощущениям больше
Да, тесты проводились на последней доступной прошивке. Вы правы, ПИД-коэффициенты по умолчанию заметно влияют на воспринимаемый люфт, особенно на удержании.
какой момент реально держит на удержании а не пиковый? в даташите вечно врут
Заявленные 30 кг·см для STS3215 — это пиковый момент срыва при 12 В; длительный удерживающий момент заметно ниже пика и зависит от нагрева. Закладывайте в проект ощутимый запас и ориентируйтесь не на цифру срыва, а на режим, в котором серво не уходит в тепловую защиту.
вообщем поделюсь опытом эксплуатации, у меня на роборуке шесть таких стоит уже почти год, и могу сказать что люфт это пол беды, главная проблема вылезает когда нижние суставы держат вес всей руки и серво потихоньку греется на удержании, момент проседает и точность кончика плывёт, я в итоге разгрузил их пружинным компенсатором и стало гораздо лучше, так что советую при проектировании сразу закладывать механическую разгрузку нижних осей а не надеяться только на момент привода, тесты ваши кстати совпадают с моими ощущениями по нагреву почти один в один
В целом результаты адекватные. Единственное — хотелось бы увидеть отдельный график зависимости люфта от наработки, потому что новый серво и серво после нескольких тысяч циклов это две большие разницы, у меня шестерни подъедаются и люфт растёт ощутимо.
а с какой нагрузкой тестили момент, через рычаг и груз или динамометрическим ключом?
Через калиброванный рычаг с тензодатчиком на конце, момент считали как сила на плечо. Динамометрический ключ давал слишком грубую дискретизацию для наших целей.
Очень помогли, спасибо.
Отличная работа, давно искал именно цифры по повторяемости а не субъективные впечатления. У меня вопрос больше методологический: при такой цене эти серво всё равно остаются расходником, поэтому интереснее не как ведёт себя свежий экземпляр а как деградирует середнячок после наработки. Если будет возможность, прогоните пару штук на ресурс тысяч на двадцать-тридцать циклов и перемерьте те же параметры, вот это была бы бомба и реально помогло бы планировать ТО на серийных изделиях.
ну наконец-то нормальные измерения а не маркетинг
Хочу поблагодарить за подробную методику измерений — это редкость для подобных обзоров. Сам занимаюсь стендовыми испытаниями приводов уже несколько лет и могу сказать, что вы корректно учли гистерезис при заходе с разных сторон, чего многие не делают. Единственное замечание: хотелось бы видеть доверительные интервалы, а не только средние значения, потому что без разброса по выборке сложно судить о воспроизводимости результата на другом экземпляре. Но в целом работа хорошая и ей можно доверять, я свои закупки во многом ориентирую на такие тесты.
брал партию из десяти штук на руку, разброс по моменту между экземплярами оказался больше чем я думал, так что одиночный тест это конечно хорошо но выборку бы побольше, хотя понимаю что это дорого и долго
сколько циклов прогоняли на повторяемость? одна-две точки это не статистика
По каждой целевой позиции делали 200 заходов из разных направлений, чтобы учесть гистерезис. Полный массив данных есть в приложении к статье.
Большое спасибо!
оооочень полезно!!! как раз выбираю между этим и аналогом, ваши цифры всё расставили по местам, спасибо большое 🙏
Хороший разбор, спасибо. Цифры по моменту совпадают с тем, что я мерил у себя.
у меня на похожем стенде вышло чуть хуже по повторяемости, грешу на свой крепёж он играл, в общем-то надо переделывать оснастку и перемерять, спасибо что выложили методику
залип на ваших графиках на полчаса)) спасибо за труд
повторяемость ок. момент так себе.
Спасибо за тест. Добавлю от себя: при работе на пределе момента эти серво иногда срываются в дрожь на удержании, лечится поднятием мёртвой зоны, но тогда страдает точность. Компромисс везде.
норм статья но вот люфт можно частично выбрать программно через фидбэк если читать энкодер и поджимать позицию, не идеально но в моих задачах хватило
Подскажите, питание 6 или 12 вольт сильно меняет картину по моменту и нагреву?
Разница заметная: STS3215 работает в диапазоне 4-14 В, паспортные 30 кг·см получены при 12 В, а на пониженном питании момент закономерно ниже (зато спокойнее нагрев). 7.4-8.4 В — в рабочем диапазоне и годятся как компромисс для непрерывной работы; за максимальным моментом идите к 12 В.
люфт бесит конечно((
А как именно вы фиксировали вал при замере люфта? Боюсь, что у меня погрешность стенда больше самого люфта.
Мы зажимали корпус в тиски через мягкие губки и упирали индикаторную головку в плечо рычага на валу. Стенд жёсткий, его собственный люфт мы предварительно вычли по контрольному калиброванному валу.
Очень помогли, спасибо.
честно не ожидал что повторяемость окажется такой стабильной для серво в этой цене норм
имхо ключевое тут не пиковый момент а именно стабильность нуля после реверса, вот это в дешёвых серво обычно плавает и собирает погрешность по всей кинематике
честно говоря я скептически относился к этим серво из за цены думал будет полный мусор по точности но ваши замеры меня переубедили, заказал партию и собрал на них учебный манипулятор для кружка, дети ломают всё подряд но эти держатся неплохо, единственное приходится периодически перекалибровывать нули потому что после ударных нагрузок энкодер иногда теряет позицию, в остальном за свои деньги это лучшее что я находил на рынке честно
вы при какой температуре мерили? интересно как момент проседает при нагреве обмоток
Замеры делались при комнатной температуре, около 23-25 °C. Под длительной нагрузкой STS3215 греется умеренно (заметно меньше, чем coreless STS3250, который в нашем сравнении был выраженным аутлайдером по нагреву); по мере прогрева обмоток момент закономерно проседает, поэтому для непрерывной работы держите запас по моменту.