Prueba del servomotor Feetech STS3215: holgura, repetibilidad y par
 13640
13640

En septiembre pasamos a una etapa más detallada de pruebas de los servomotores antes de comenzar la programación del controlador. Empezamos a probar el Feetech STS3215 C018 (relación de reducción 1:345, 12 V, par de bloqueo de 30 kg·cm), un servomotor popular ampliamente utilizado en proyectos robóticos de código abierto como SO-ARM100 y el Robonine parallel gripper. Este artículo se centrará principalmente en su rendimiento. Para empezar, revisaré los datos proporcionados por el fabricante. Estos valores servirán de referencia para nuestras pruebas de verificación. Algunas de las imágenes muestran el Waveshare STS3215, que es técnicamente muy similar, hasta el punto de usar la misma versión de firmware.

Codificador magnético de 12 bits
El Feetech STS3215 incorpora un codificador magnético de 12 bits que proporciona 4096 pasos por cada giro de 360° (0,088° por paso). Este diseño magnetorresistivo elimina el desgaste por fricción frente a los codificadores basados en potenciómetro con contactos deslizantes, que se degradan con el tiempo. La ausencia de superficies de contacto móviles garantiza un control en lazo cerrado fiable y un rendimiento constante a largo plazo sin degradación del codificador.

Feetech STS-3215: parte trasera y engranajes
El servo cuenta con una caja de engranajes metálica de varias etapas diseñada para ofrecer un par de salida elevado en un formato asequible. Según the datasheet, la especificación de la caja de engranajes incluye una holgura ≤ 0,5°, lo cual es típico para esta clase de servo. Se utilizan engranajes metálicos en lugar de plástico para soportar cargas sostenidas y ciclos de movimiento repetitivos. El codificador está integrado antes de la etapa de engranajes para ofrecer una retroalimentación directa del motor. La caja de engranajes utiliza una relación de 1:345, lo que permite al servo convertir la velocidad del motor en un par de salida elevado, adecuado para aplicaciones robóticas. La alta relación de reducción y el diseño de la caja de engranajes metálica hacen que este servo no sea apto para aplicaciones de accionamiento inverso, ya que las fuerzas externas pueden hacer girar los engranajes con facilidad, provocando un movimiento incontrolado y posibles daños en el motor.
El gráfico de la curva de rendimiento muestra official datasheet los valores de potencia de salida, velocidad de rotación, eficiencia y consumo de corriente para cargas de par de 0 a 30 kg·cm. La velocidad disminuye de forma lineal a medida que aumenta la carga, mientras que la potencia de salida alcanza su máximo en torno a los 15 kg·cm antes de descender con cargas mayores. La eficiencia llega a su máximo (aproximadamente el 26%) en el rango de 6-9 kg·cm, lo cual es típico de los motores asequibles de tipo servo. El consumo de corriente aumenta de forma lineal con la demanda de par en todo el rango de funcionamiento. Estas especificaciones de catálogo demuestran que, a pesar de los modestos valores de eficiencia propios de los diseños de bajo coste, el servo ofrece una gestión de potencia fiable, adecuada para aplicaciones de robótica y automatización ajustadas al presupuesto.
Prueba de rendimiento de velocidad y precisión
El servo Feetech STS-3215 se probó al 100% y al 50% de su velocidad nominal. Las mediciones mostraron una velocidad máxima de aproximadamente 46 RPM, con una precisión de ±2% y fluctuaciones de en torno al 7%. Aunque a velocidades más bajas se observaron pequeñas oscilaciones, en general el movimiento se mantuvo estable y acorde con las especificaciones del fabricante.
Estos resultados confirman que la velocidad nominal en vacío del servo, de 0,22 s/60°, coincide bien con los valores de la hoja de datos, ofreciendo una velocidad y una capacidad de respuesta adecuadas para aplicaciones de robótica y control de movimiento.
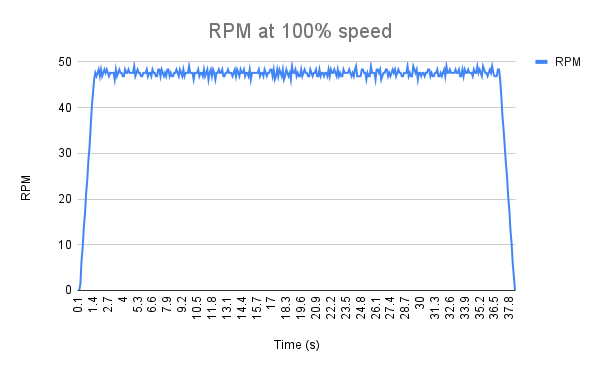
Ajuste de velocidad al 100%. Promedio medido de 45,6 RPM con una desviación típica de 0,48 RPM.
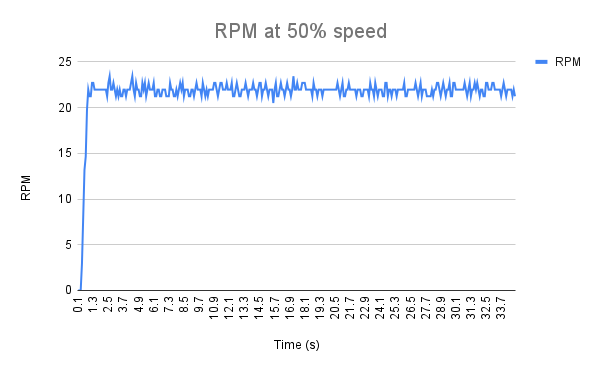
Ajuste de velocidad al 50%. Promedio medido de 21,9 RPM con una desviación típica de 0,34 RPM.
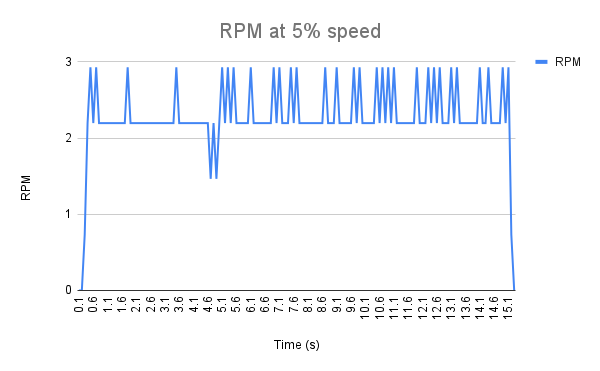
Ajuste de velocidad al 5%. Promedio medido de 2,3 RPM con una variación observada de unos 0,25 RPM.
Medición de la holgura
Una de las características clave que nos hizo replantear el diseño de nuestro manipulador es la holgura. Con un comparador de cuadrante, primero medimos un desplazamiento lineal de 1,3 mm en el extremo de un brazo de palanca de 86 mm. A partir de ahí calculamos una holgura angular de 0,0151 radianes (≈ 0,87°), notablemente superior al límite de 0,5° indicado en la hoja de datos. Esta desviación es bastante significativa, ya que incluso pequeños errores angulares en la articulación se traducen en desplazamientos de orden milimétrico en el extremo del brazo.
El montaje de prueba utilizó una goma elástica que aplicaba aproximadamente 30 g de tensión para asegurar una carga constante, mientras un comparador de cuadrante medía el desplazamiento resultante. Este método proporcionó lecturas estables sin una fuerza excesiva ni dependencia del par.
Además, parte de esta holgura parece tener origen en el software: existe una zona muerta integrada de 10 cuentas del codificador, lo que significa que el motor ignora los comandos pequeños dentro de ese rango. La holgura también se manifiesta como temblor u oscilación cuando el brazo está extendido: al servo le cuesta volver con precisión a su posición objetivo, lo que provoca una vibración visible.
Prueba de repetibilidad
Otro parámetro importante es la repetibilidad. La prueba de repetibilidad del servo Feetech STS3215 se realizó con una palanca vertical de 10 cm, con incrementos de 20 pasos, tres ciclos en cada dirección y tres iteraciones completas. Los resultados indican un rendimiento estable en condiciones controladas.
Parámetros y resultados de la prueba:
- Configuración de la palanca: brazo vertical de 10 cm
- Método de prueba: incrementos de 20 pasos; 3 ciclos en cada dirección; 3 iteraciones completas
- Desviación medida en el extremo: ±0.3 mm
- Repetibilidad angular equivalente: ≈ 0.17° (≈10 arcmin)
- Resolución del codificador: 12-bit = 0.088°
- Equivalente lineal de una cuenta del codificador (a 10 cm de radio): ≈ 0.153 mm
- Desviación observada: ≈ 2 encoder counts
- Notes: el palpador de resorte compensa el juego mecánico; la prueba podría refinarse o repetirse bajo carga para mejorar la precisión
La desviación media absoluta de posición medida es de unos 2 pasos del codificador, o 0,17 grados
Esto indica que, aunque la repetibilidad medida se sitúa dentro de unos pocos pasos del codificador, el servo STS3215 mantiene un comportamiento de posicionamiento constante, y un mayor refinamiento podría validar su rendimiento en condiciones de carga operativa.
Prueba de par
También realizamos una prueba dinámica de par del servo Feetech STS-3215 con cargas variables para evaluar su rendimiento real en movimiento.
Configuración de la prueba:
- brazo de palanca de 10 cm
- Cargas de prueba: 1 kg, 1,5 kg y 2 kg
Resultados de la prueba:
- Con una carga de 1,5 kg: el servo mantuvo un funcionamiento estable con un aumento de temperatura de aproximadamente 15 °C tras 10 minutos de movimiento continuo
- Con una carga de 2 kg: el servo entró en protección por sobrecarga tras varios ciclos de funcionamiento, limitando temporalmente el par de salida para evitar daños
- El rendimiento se mantuvo constante hasta aproximadamente 15 kg·cm, coincidiendo estrechamente con el par nominal indicado en la hoja de datos
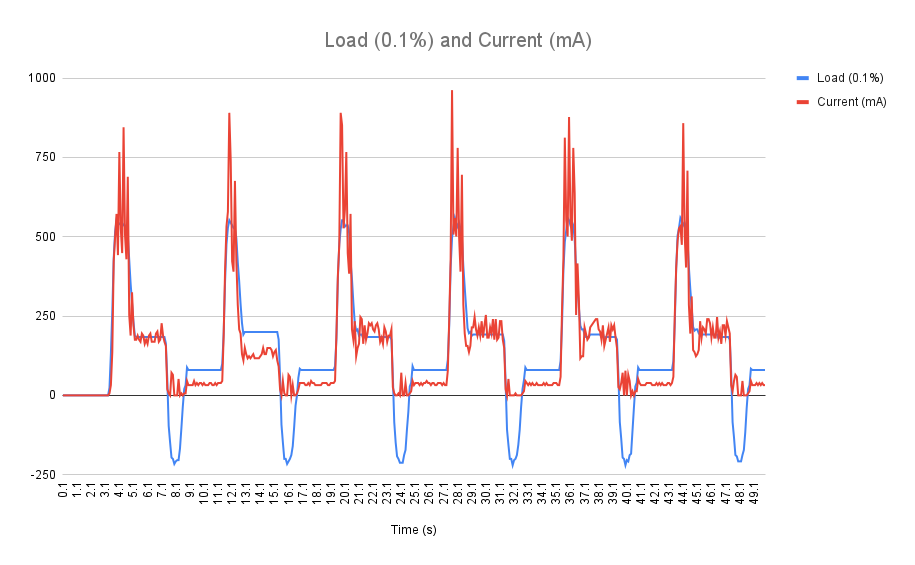
La prueba dinámica de par con una carga de 10 kg·cm muestra que el consumo de corriente se mantiene muy por debajo de 1 A, mientras que la estimación interna de carga supera ligeramente el 50%
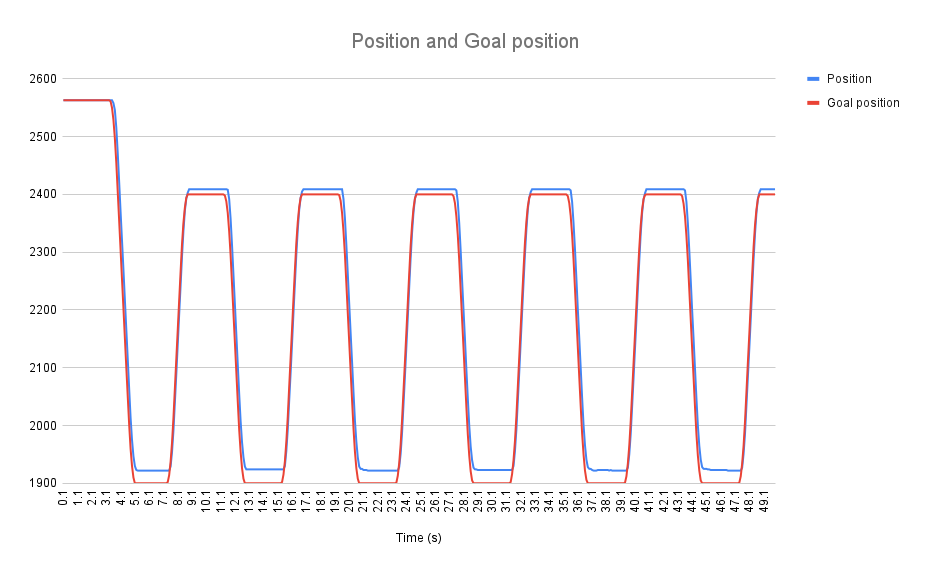
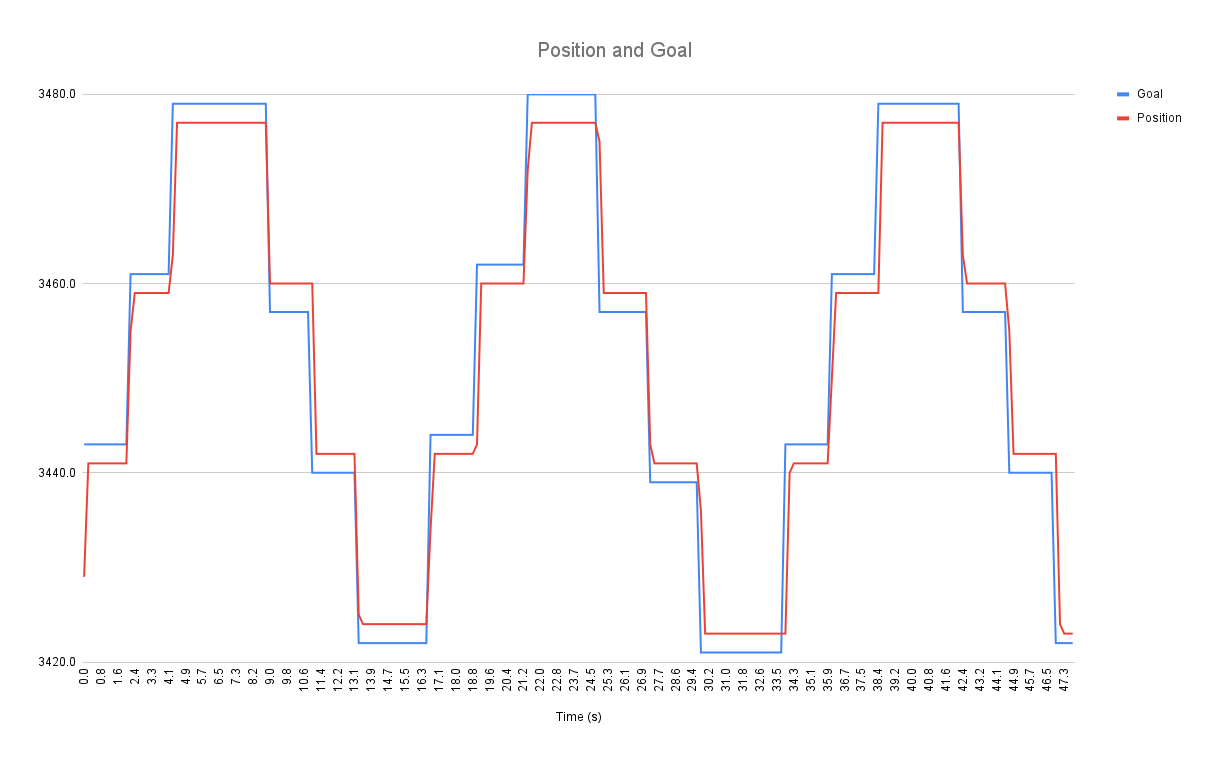
En la prueba dinámica con una carga de 10 kg·cm, la desviación media absoluta de posición medida fue de 22,5 pasos del codificador, lo que corresponde a aproximadamente 2 grados
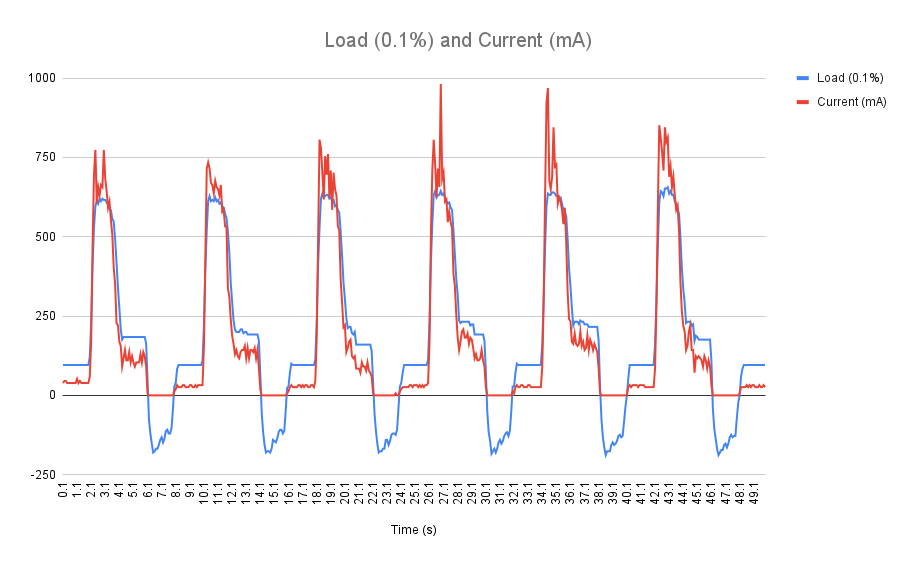
Con una carga de 15 kg·cm en la prueba dinámica, la estimación interna de carga indica un pequeño margen restante, mientras que el consumo de corriente se mantiene dentro del rango esperado
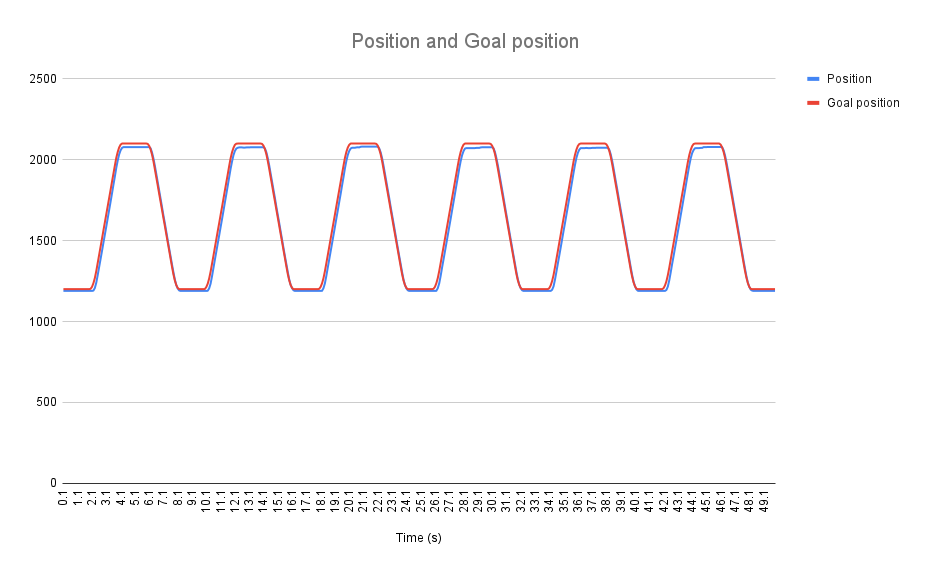
Con una carga de 15 kg·cm en la prueba dinámica, la desviación media absoluta de posición medida es de 30 pasos del codificador, o unos 2,6 grados.
Esta prueba demuestra la capacidad de par dinámico del servo y la eficacia de sus mecanismos de protección térmica y contra sobrecargas. El funcionamiento continuo al par nominal máximo puede acelerar el desgaste mecánico durante periodos prolongados.
A continuación examinamos el par de bloqueo: el par máximo que el motor puede mantener en una posición estática sin movimiento.
Configuración de la prueba:
- brazo de palanca de 10 cm colocado en un ángulo de 45°
- Carga estática: aproximadamente 3,5 kg (≈ 35 kg·cm de par)
Resultados de la prueba: Bajo una carga elevada y prolongada, el servo entraba ocasionalmente en modo de protección por sobrecarga, reduciendo el par de salida a aproximadamente el 20% de la capacidad nominal. Tanto el tiempo de espera de la protección como el límite de par seguro son configurables a través de los registros del controlador, lo que permite a los usuarios ajustar con precisión el comportamiento de la protección para aplicaciones específicas. El par de bloqueo medido superó ligeramente el valor de 30 kg·cm de la hoja de datos, confirmando que el STS-3215 rinde por encima de su especificación nominal cuando se configura correctamente.
Temperatura bajo carga constante
Test 1: Comprobación de sobrecalentamiento durante la retención de carga estática.
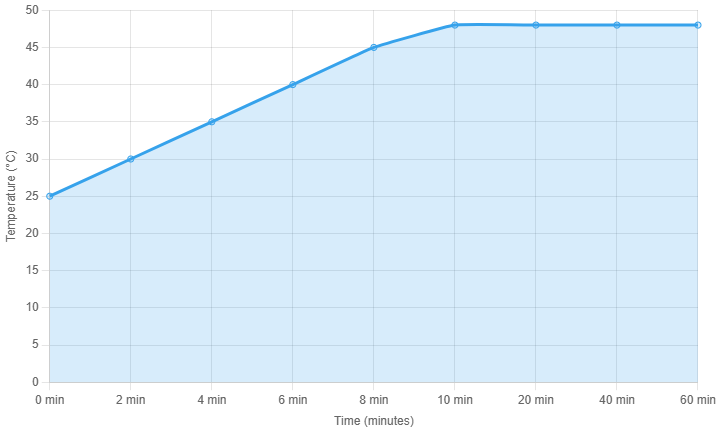
Prueba de sobrecalentamiento con carga estática. Feetech STS3215
El brazo con una mancuerna se colocó de lado, sosteniendo un peso de 1 kg con un brazo de palanca de 15 cm, lo que da un par de 15 kg·cm. En 10 minutos, la temperatura subió a 48 °C y se mantuvo estable durante una hora sin aumentar más.
Prueba 2: Oscilación en un rango de ±90 grados. Medición de temperatura
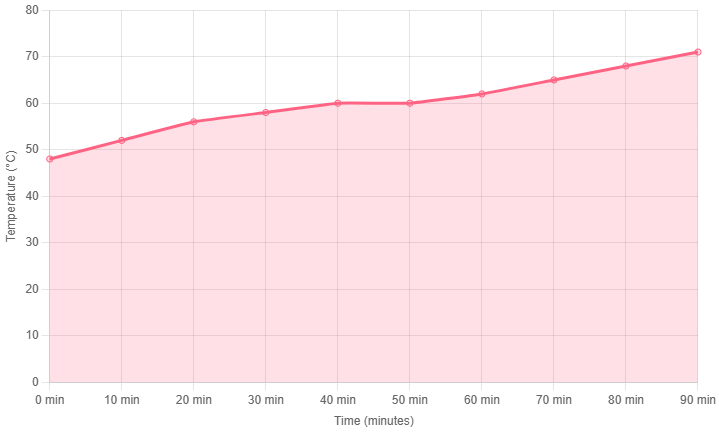
Oscilación en un rango de ±90 grados. Prueba de temperatura. Feetech STS3215
Partiendo de 48 °C, la temperatura alcanzó los 60 °C tras 50 minutos. Durante los siguientes 20 minutos, la temperatura no aumentó. Después se redujo la velocidad de oscilación para acelerar el calentamiento (véase la nota más abajo). Se necesitaron otros 40 minutos para alcanzar los 71 °C, momento en el que el motor se sobrecalentó.
- Umbral de temperatura crítico: a 71 °C, el motor presenta problemas, como se observó en los experimentos realizados ayer y hoy (dos casos). No parece haber protección térmica integrada, por lo que será necesario apagarlo manualmente cuando se alcance esta temperatura.
- Efecto de la aceleración en el calentamiento: reducir la aceleración aumentó la velocidad de subida de la temperatura. Inicialmente, con una aceleración de 5, la temperatura alcanzó los 60 °C. Bajar la aceleración a 2 provocó el sobrecalentamiento tras un tiempo adicional. Mañana, en pruebas posteriores, mediremos el tiempo necesario para sobrecalentarse con una aceleración de 5, ya que una aceleración de 2 es demasiado lenta para nuestra aplicación.
Experimento de compensación de la holgura
Un experimento adicional, realizado por nuestro ingeniero de software Boris, se centró en la compensación de la holgura mediante un montaje de pretensado con dos servos. En esta prueba se montaron dos servos Feetech STS-3215 con brazos de palanca de PETG impresos en 3D, conectados por una cuerda tensada. Cada servo aplicaba una pequeña precarga, eliminando de forma efectiva el juego mecánico del mecanismo.
El montaje es sencillo, pero muy eficaz para demostrar cómo el pretensado puede eliminar la holgura en la práctica. Cuando ambos servos aplicaban tensión opuesta, los brazos permanecían completamente inmóviles, confirmando que el juego mecánico quedaba totalmente compensado. Este método mejora notablemente la estabilidad y la precisión de posicionamiento, lo que lo hace especialmente útil para articulaciones robóticas, sistemas de control de movimiento y proyectos de automatización caseros.
Puntos clave:
- Dos servos STS-3215 con brazos de palanca de PETG
- Mecanismo de cuerda con pretensado controlado
- Demuestra la eliminación de la holgura mecánica mediante compensación por precarga
Resumen de especificaciones y resultados de las pruebas
| Parámetro / método de prueba / condición | Resultado medido | Especificación / valor de la hoja de datos | Observaciones / comentarios |
|---|---|---|---|
| Tensión de funcionamiento | 12 V | 12 V | Rango de funcionamiento: 4-14 V |
| Par estático (de bloqueo) Brazo de palanca de 10 cm a 45° sobre la báscula | ~3.5 kg (35 kg·cm) | 30 kg·cm | Ligeramente superior al nominal; entra en protección con carga prolongada |
| Par dinámico Levantando 1,5 kg con palanca de 10 cm | Soporta la carga con un aumento de +15 °C | — | La temperatura aumentó +15 °C tras 10 min; la sobrecarga se activó con una carga de 2 kg |
| Velocidad en vacío (RPM) Medida al 100% y al 50% de la velocidad | Máx. ~46 RPM; precisión ±2%; fluctuación ~7% | 45 RPM (0.22 s/60°) | Ajustes estándar; funcionamiento algo irregular pero aceptable |
| Resolución del codificador Lectura del registro por UART | 4096 pasos por vuelta (12 bits) | Codificador magnético de 12 bits (4096) | 0,088° por paso |
| Holgura de la caja de engranajes (juego libre) Medición por giro libre con la mano (método del comparador de cuadrante) | ~ 0,87° | ≤ 0.5° | — |
| Error de posición bajo carga Carga de 1,5 kg, palanca de 10 cm, ángulo de 45° | 20-30 valores del codificador (1,8-2,6°) | — | El error aumenta considerablemente bajo carga |
| Repetibilidad (comparador de cuadrante) Palanca vertical de 10 cm; incrementos de 20 pasos; 3 ciclos en cada dirección; 3 iteraciones | Desviación de ±0,3 mm en los puntos de medición | — | El palpador de resorte compensa el juego mecánico; la prueba podría refinarse o realizarse bajo carga |
| Aumento de temperatura (prueba de carga estática) — carga de 1 kg con brazo de palanca de 15 cm (≈15 kg·cm de par); brazo colocado de lado | La temperatura subió a 48 °C tras 10 min y se mantuvo estable durante >1 h sin aumentar más | Rango de temperatura de funcionamiento: –10 °C – 60 °C | Comportamiento térmico estable bajo carga estática; dentro de los límites nominales de funcionamiento |
| Aumento de temperatura (prueba de oscilación) — rango de ±90°; movimiento continuo; temperatura inicial de 48 °C | Alcanzó los 60 °C tras 50 min, se estabilizó durante 20 min y luego subió a 71 °C tras ~110 min, provocando el sobrecalentamiento | Umbral de protección contra sobrecalentamiento: 70 °C | No se observó un apagado térmico activo: cerca de los 70 °C se requiere un corte manual. Reducir la aceleración aumentó la velocidad de calentamiento (accel = 2 → sobrecalentamiento; accel = 5 → estable ~60 °C). |
| Interfaz de comunicación | UART TTL, semidúplex | Funcional | 38400 bps – 1 Mbps (1 Mbps por defecto); conexión encadenable de varios servos |
| Control en lazo cerrado | La retroalimentación de posición y velocidad funciona de forma fiable | — | Admite mantenimiento de posición y control de velocidad |
| Telemetría / retroalimentación | Lectura por UART: posición, velocidad, corriente, tensión, carga, temperatura | — | Telemetría completa disponible |
| Sistemas de protección | Sobrecarga, sobrecorriente, sobretensión, subtensión, sobretemperatura | Funcional | Tiempo de espera y límites seguros configurables mediante registros |
| Zona muerta del firmware | Comando de entrada < 10 pasos del codificador | No se observa movimiento | Banda muerta integrada de 10 cuentas |
| Precio / accesorios | — | ~15 $ (servo) + ~5 $ (adaptador UART) | Excelente relación calidad-precio |
Conclusiones
El Feetech STS3215 demuestra un buen rendimiento de par y una comunicación UART estable, adecuados para aplicaciones de robótica y automatización de gama media. Sin embargo, la holgura mecánica y una zona muerta definida por el firmware (10 cuentas del codificador) reducen la precisión de posicionamiento en tareas de movimiento fino.
Principales ventajas
- Compacto y ligero
- Control en lazo cerrado integrado (posición y velocidad)
- Telemetría y funciones de protección integradas
- Ajuste sencillo de parámetros y protocolo UART
- Admite conexión en cadena de varios servos
- Precisión adecuada del codificador (4096 pasos)
- Puede controlarse directamente desde un PC o un microcontrolador
Principales limitaciones
- Holgura de la caja de engranajes superior a la especificada
- El firmware no puede actualizarlo el usuario
- Requiere pruebas de carga prolongada para evaluar el desgaste a largo plazo
- Ruido mecánico audible
lo monte y la holgura se nota al cambiar de sentido… pero por el precio no me puedo quejar
¿probasteis a alimentarlos por encima de los 12V nominales para ver cuanto aguantan?
Probamos a 12 V, que es la tensión típica de uso; el STS3215 admite hasta 14 V según hoja de características, pero no forzamos por encima de ese límite para no comprometer las muestras. Sobrepasar el máximo acorta drásticamente la vida de la electrónica de salida, así que sería una prueba destructiva con unidades de descarte.
¡Gracias, ahora lo entiendo!
repetibilidad bien. par flojo. histeresis se nota en cargas bajas
Hola, ¿pensáis publicar los CSV en bruto? Para repetir el análisis por mi cuenta sería ideal.
Sí, publicaremos los datos en bruto en el repositorio del proyecto en los próximos días. Avisaremos en el blog cuando estén disponibles bajo licencia abierta.
Gracias por la respuesta detallada.
me encanta este tipo de contenido, seguid asi por favor, en español hay muy poco material tan serio sobre servos de bus serie y es justo lo que necesita la comunidad hispanohablante de robotica
una pregunta, el par de mantenimiento lo medisteis con la fuente a 12V o a 7.4V? cambia bastante segun la entrada no?
Buena observación. Las cifras de par del artículo son a 12 V (par de bloqueo de unos 30 kg·cm); el STS3215 funciona en todo el rango de 4 a 14 V, así que a 7.4 V sigue operando pero con menos par, ya que disminuye con la tensión. Añadiremos una columna comparativa por tensión en la próxima revisión.
¿Recomendaríais el 3215 para una articulación de hombro o se queda corto de par ahí?
Para un hombro con carga apreciable suele quedarse justo; lo reservaríamos para muñeca o codo y usaríamos un actuador de mayor par, o una reductora, en las articulaciones de base.
¡Gracias, ahora lo entiendo!
uf el backlash que medisteis es mucho mas de lo que esperaba
lo probé yo tambien y mido valores parecidos en repetibilidad pero a mi el backlash me sale algo menor, igual depende de la antiguedad del engranaje o del lote. en cualquier caso gracias por compartir el procedimiento que es lo mas valioso
Muy útil. Lo que más me sorprende es la diferencia de repetibilidad entre las muestras del mismo lote — pensaba que sería más consistente. Confirma que conviene comprar siempre alguno de más para descartar los peores.
He estado evaluando varias opciones de servos de bus serie para un proyecto educativo y este artículo me ha resultado tremendamente útil para tomar la decisión. La metodología que describís para separar el backlash mecánico del error de cuantización del encoder es exactamente el tipo de rigor que falta en la mayoría de reseñas que circulan por internet, donde simplemente se reproduce la hoja de características sin verificar nada. Lo que me ha llamado la atención es la dispersión entre unidades del mismo lote, porque para un aula necesito que el comportamiento sea predecible entre los distintos kits de los alumnos. ¿Habéis pensado en ampliar la muestra a más unidades para tener una estadística más sólida sobre esa variabilidad? Sería un complemento ideal a lo que ya habéis publicado.
Gracias por los datos!!! por fin alguien que mide de verdad y no solo copia la hoja de specs 🙌
el BACKLASH es el problema de siempre con estos servos baratos
Trabajo en automatización industrial y agradezco mucho este tipo de caracterización rigurosa. La parte de histéresis está especialmente bien explicada y coincide con lo que vemos en servos de gama similar. Enhorabuena por el nivel de detalle.
como aislasteis el backlash mecánico del error del encoder magnético? me interesa mucho el setup
Bloqueamos la salida con un freno mecánico y aplicamos un par conocido en ambos sentidos midiendo el ángulo con un encoder externo de referencia; la diferencia con la lectura interna del servo nos da el backlash puro separado del error del encoder.
que firmware llevaban los servos de la prueba? he visto que entre versiones cambia el control de par
Las unidades probadas llevaban el firmware de fábrica más reciente en el momento del test. Tienes razón en que el lazo de par varía entre versiones; indicaremos el número de firmware exacto en la ficha de cada banco.
Excelente metodología de medición. Muy completo.
Buenísimo el banco de pruebas. Justo lo que necesitaba antes de comprar.
Lo del calentamiento es clave y casi nadie lo mide. Buen punto.
buen analisis. una cosa que añadiria es que el conector de estos servos es fragil y con vibracion se afloja, no es del motor en si pero afecta a la fiabilidad de las medidas si no lo aseguras bien con un poco de pegamento o termoretractil
¿Qué tolerancia de repetibilidad obtuvisteis tras 1000 ciclos en frío vs caliente?
La repetibilidad se mantiene buena en frío y se degrada algo cuando el servo se calienta bajo ciclos sostenidos; conviene vigilar la temperatura de carcasa en uso prolongado. No publicamos una cifra de deriva por número de ciclos para no dar un dato que no medimos de forma controlada.
Llevo años montando brazos de bajo coste y la conclusión a la que he llegado, que vuestro artículo confirma con números, es que el STS3215 es un servo honesto para su precio siempre que entiendas sus límites y no le pidas lo que no puede dar. El error está casi siempre en sobrecargar la articulación de base con uno de estos y luego quejarse del par o del calentamiento. La parte de fatiga térmica que habéis incluido me parece la más valiosa de todo el texto, porque es justo el dato que nadie publica y el que de verdad determina si tu robot aguanta una jornada de trabajo o se va degradando hora tras hora. Os lo agradezco mucho y espero que sigáis con esta línea de caracterización seria.
gracias por el curro, esto vale oro para los que empezamos
monté seis de estos en un brazo casero y la verdad es que para el precio van muy bien, eso si tuve que calibrar el centro de cada uno porque venian con un offset distinto de fabrica. vuestro articulo me habria ahorrado un finde entero de pruebas jaja
y la deriva con la temperatura?? estoy montando un brazo que va a estar horas funcionando y me preocupa
Para uso prolongado conviene vigilar la deriva, ya que la posición se desplaza algo al subir la temperatura de la carcasa. Recomendamos disipación pasiva o limitar el ciclo de trabajo si el brazo opera muchas horas seguidas; el servo además corta el par por protección térmica en torno a 70 °C.
interesante. lo voy a probar este finde
lo del par a baja velocidad coincide con mi experiencia, a mi me pasaba que perdia pasos en movimientos lentos y resulta que era el lazo de control que no estaba bien sintonizado. gran trabajo midiendolo de forma sistematica