Feetech STS3215 サーボモーターの試験:バックラッシュ・再現性・トルク
 13640
13640

9月、私たちはコントローラーのプログラミングを始める前に、サーボモーターのより詳細な試験段階へ進みました。まず次のサーボのテストを開始しました。 Feetech STS3215 C018 (減速比1:345、12V、ストールトルク30 kg·cm)。これは、次のようなオープンソースのロボティクスプロジェクトで広く使われている人気のサーボモーターです。 SO-ARM100 と Robonine parallel gripper。この記事では主にその性能に焦点を当てます。まず、メーカーが提供するデータを確認します。これらの値は、私たちの検証テストの基準となります。一部の画像には Waveshare STS3215 が写っていますが、技術的には非常に似ており、同じファームウェアバージョンを使用しているほどです。

12ビット磁気エンコーダー
Feetech STS3215 は、360°回転あたり4096ステップ(1ステップ0.088°)を実現する12ビット磁気エンコーダーを搭載しています。この磁気抵抗式の設計は、摺動接点を持ち時間とともに劣化するポテンショメータ式エンコーダーと比べて、摩擦による摩耗をなくします。可動接触面がないため、信頼性の高いクローズドループ制御と、エンコーダーの劣化のない安定した長期性能を実現します。

Feetech STS-3215:背面とギア
このサーボは、手頃な価格の本体で高いトルク出力を実現するよう設計された多段式の金属ギアボックスを備えています。次の情報によると、 the datasheetギアボックスの仕様にはバックラッシュ ≤ 0.5° が含まれており、これはこのクラスのサーボでは一般的です。持続的な負荷や反復的な動作サイクルに耐えるため、プラスチックではなく金属ギアが使われています。エンコーダーはモーターの直接フィードバックを得るため、減速段の前に組み込まれています。ギアボックスは1:345のギア比を採用し、モーターの回転をロボティクス用途に適した高トルク出力へ変換できます。高いギア比と金属ギアボックスの設計により、このサーボはバックドライブ用途には適しません。外力によってギアが容易に逆駆動され、制御不能な動きやモーターの損傷を招くおそれがあるためです。
性能特性グラフは次の値を表示します。 official datasheet 0から30 kg·cm までのトルク負荷にわたる出力、回転速度、効率、消費電流の値です。速度は負荷の増加とともに直線的に低下し、出力は15 kg·cm 付近でピークに達した後、より重い負荷では低下します。効率は6〜9 kg·cm の範囲で最大(約26%)に達し、これは手頃な価格のサーボ級モーターでは一般的です。消費電流は動作範囲全体を通じて、要求トルクに比例して直線的に増加します。これらのカタログ仕様は、低コスト設計に伴う控えめな効率値にもかかわらず、このサーボが予算重視のロボティクスや自動化用途に適した信頼性の高い電力管理を提供することを示しています。
速度性能と精度の試験
Feetech STS-3215 サーボを定格速度の100%および50%でテストしました。測定では、最高速度は約46 RPM、精度は±2%、変動は約7%でした。低速ではわずかな振動が見られましたが、全体として動作は安定しており、メーカーの仕様と一致していました。
これらの結果は、このサーボの公称無負荷速度0.22 s/60° がデータシートの値とよく一致し、ロボティクスやモーション制御用途に十分な速度と応答性を提供することを裏付けています。
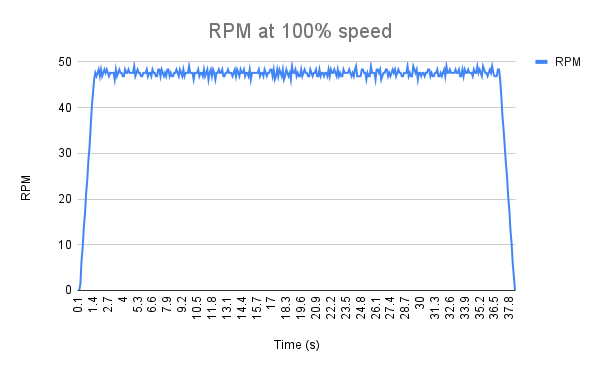
100%速度設定。測定平均は45.6 RPM、標準的なばらつきは0.48 RPM。
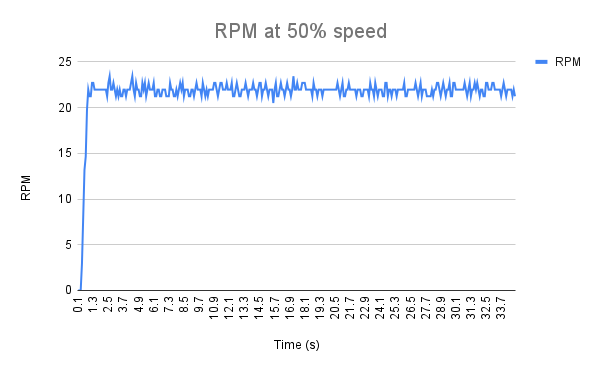
50%速度設定。測定平均は21.9 RPM、標準的なばらつきは0.34 RPM。
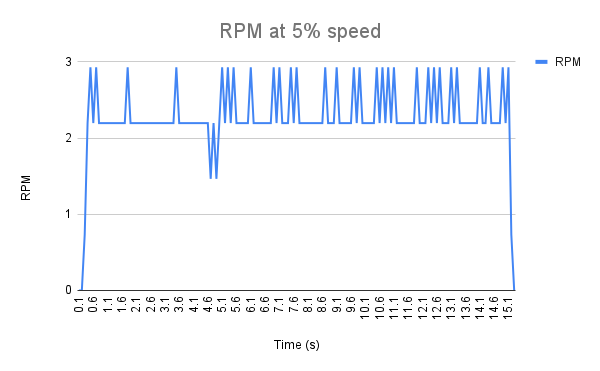
5%速度設定。測定平均は2.3 RPM、観測された変動は約0.25 RPM。
バックラッシュの測定
私たちにマニピュレータの設計を見直させた重要な特性の一つがバックラッシュです。ダイヤルゲージを使い、まず86 mm のレバーアーム先端で1.3 mm の直線変位を測定しました。これから角度バックラッシュを0.0151ラジアン(≈ 0.87°)と算出しましたが、これはデータシートに記載された0.5° の限界より明らかに大きい値です。この偏差はかなり大きく、関節でのわずかな角度誤差でも、アーム先端ではミリメートル単位のずれに変わるためです。
このテスト構成では、一定の負荷を確保するため約30 g の張力をかけるゴムバンドを使用し、ダイヤルゲージで生じた変位を測定しました。この方法は、過大な力やトルク依存なしに安定した測定値をもたらしました。
さらに、このバックラッシュの一部はソフトウェアに起因しているようです。エンコーダー10カウント分の不感帯が組み込まれており、モーターはその範囲内の小さな指令を無視します。バックラッシュは、アームを伸ばした際のジッターや振動としても現れます。サーボは目標位置へ正確に戻ることが難しく、目に見える振動が生じます。
再現性の試験
もう一つの重要なパラメータは再現性です。Feetech STS3215 サーボの再現性試験は、10 cm の垂直レバーを使い、20ステップ刻み、各方向3サイクル、合計3回の完全な反復で実施しました。結果は、制御された条件下での安定した性能を示しています。
テストのパラメータと結果:
- レバー構成: 10 cm の垂直アーム
- テスト方法: 20ステップ刻み、各方向3サイクル、完全な反復3回
- 測定された先端偏差: ±0.3 mm
- 相当する角度再現性: ≈ 0.17° (≈10 arcmin)
- エンコーダー分解能: 12-bit = 0.088°
- エンコーダー1カウントの直線換算(半径10 cm 時): ≈ 0.153 mm
- 観測された偏差: ≈ 2 encoder counts
- Notes: スプリングプローブが機械的な遊びを補償する。精度向上のため、テストはさらに精緻化、または負荷下で繰り返すことが可能
測定された平均絶対位置偏差は約2エンコーダーステップ、すなわち0.17度
これは、測定された再現性が数エンコーダーステップ以内に収まる一方で、STS3215 サーボが一貫した位置決め挙動を維持していることを示しており、さらなる精緻化によって、実運用負荷条件下での性能を検証できるでしょう。
トルクの試験
私たちは、動作中の実際の性能を評価するため、さまざまな負荷を用いて Feetech STS-3215 サーボの動的トルク試験も行いました。
テスト構成:
- 10 cm のレバーアーム
- 試験負荷:1 kg、1.5 kg、2 kg
テスト結果:
- 1.5 kg 負荷時:サーボは安定した動作を維持し、連続動作10分後の温度上昇は約15 °C
- 2 kg 負荷時:サーボは数回の動作サイクル後に過負荷保護に入り、損傷を防ぐためトルク出力を一時的に制限
- 性能はおよそ15 kg·cm まで一貫しており、データシートに記載された定格トルクとよく一致
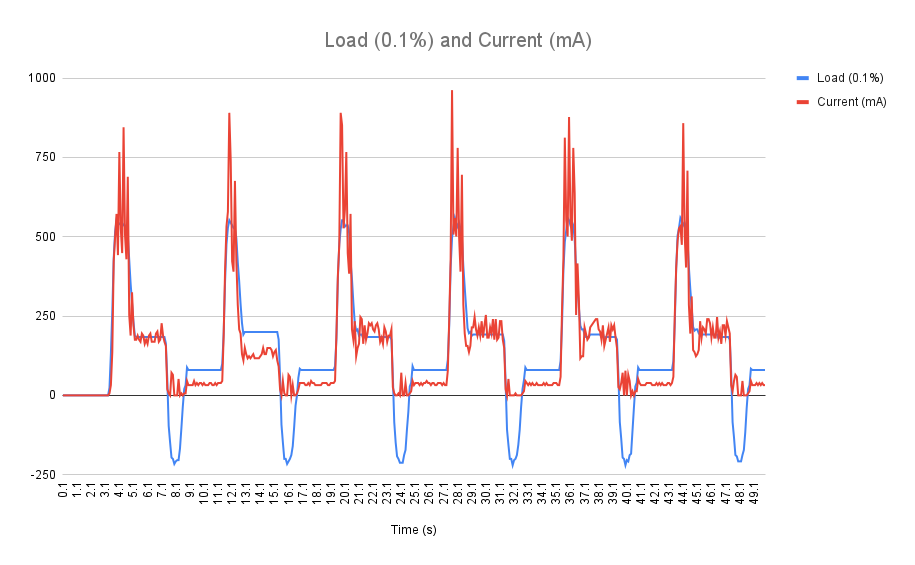
10 kg·cm 負荷での動的トルク試験では、消費電流は1 A を大きく下回ったままで、内部負荷推定値はわずかに50%を超える
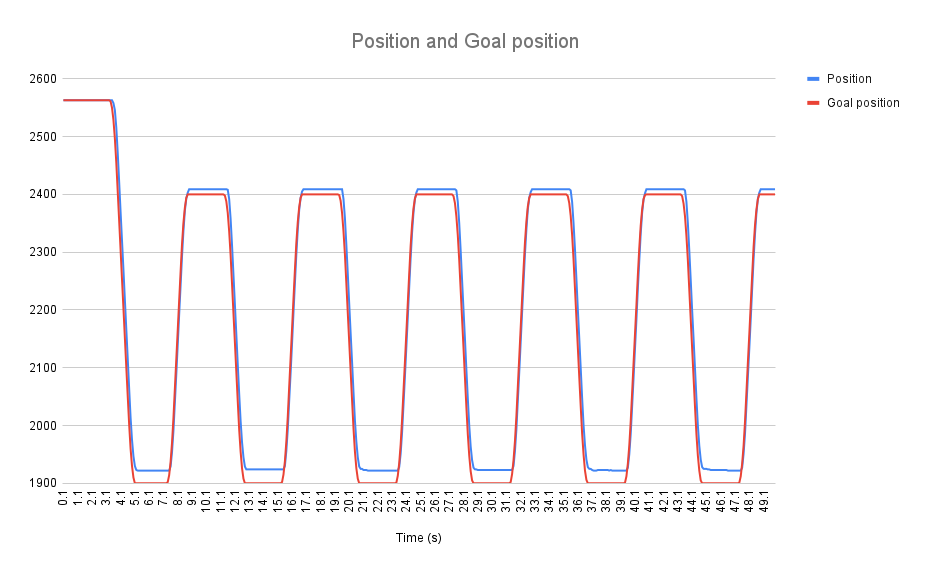
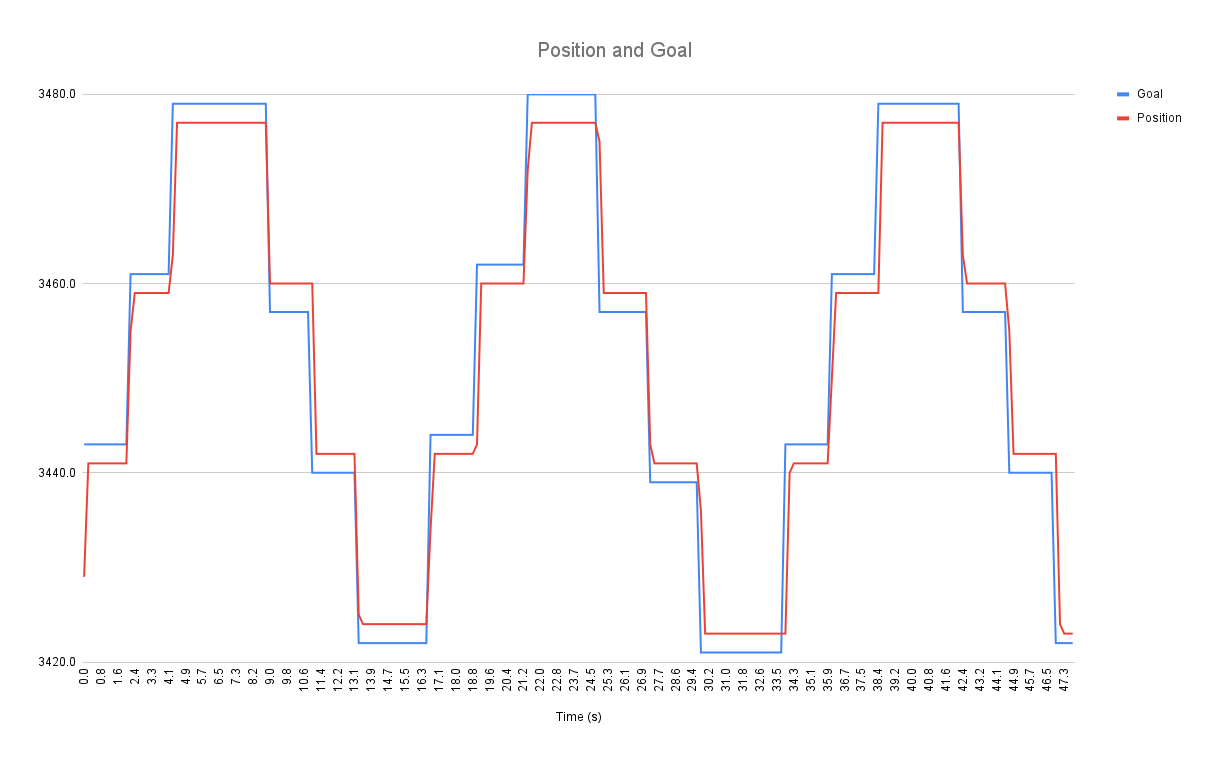
10 kg·cm 負荷での動的試験では、測定された平均絶対位置偏差は22.5エンコーダーステップで、約2度に相当
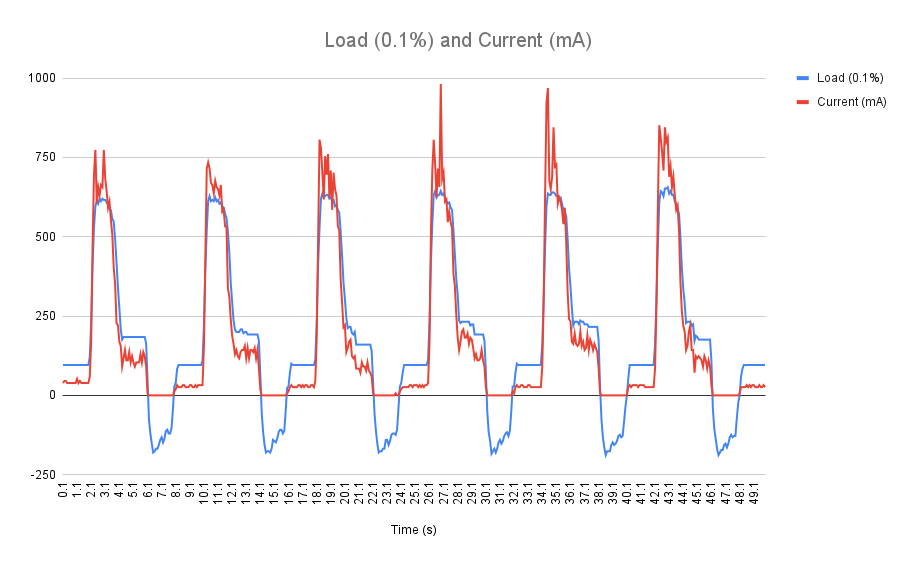
動的試験での15 kg·cm 負荷時、内部負荷推定値はわずかな余裕が残っていることを示し、消費電流は想定範囲内にとどまる
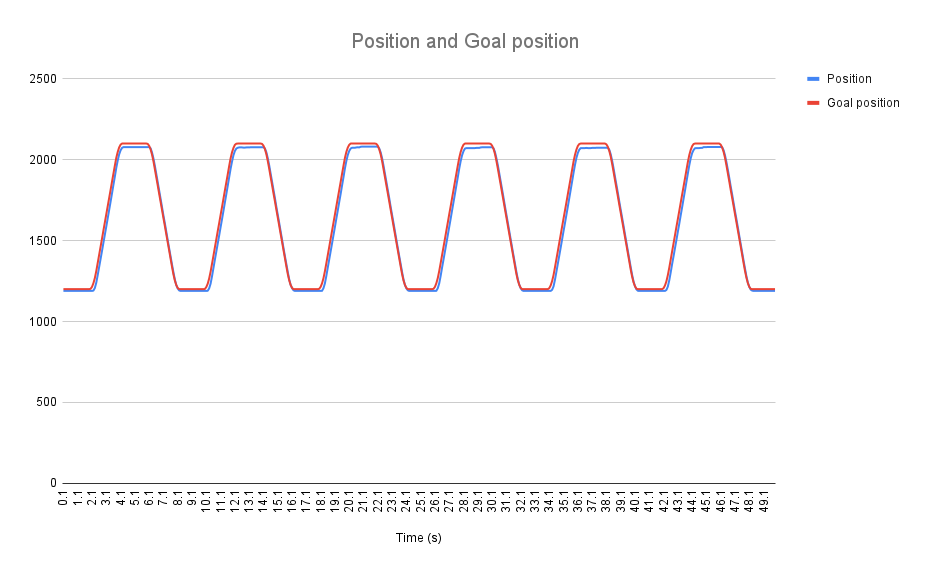
動的試験での15 kg·cm 負荷時、測定された平均絶対位置偏差は30エンコーダーステップ、すなわち約2.6度。
この試験は、サーボの動的トルク能力と、その熱保護および過負荷保護機構の有効性を実証しています。最大定格トルクでの連続運転は、長期間にわたると機械的摩耗を早めるおそれがあります。
次に、ストールトルク、すなわちモーターが動かずに静止状態で保持できる最大トルクを調べました。
テスト構成:
- 45° の角度に設置した10 cm のレバーアーム
- 静的負荷:約3.5 kg(≈ 35 kg·cm のトルク)
テスト結果: 長時間の重負荷下では、サーボは時折過負荷保護モードに入り、トルク出力を公称容量の約20%まで低下させました。保護のタイムアウトと安全トルク上限はいずれもコントローラーのレジスタを介して設定可能で、特定の用途に合わせて保護動作を微調整できます。測定されたストールトルクはデータシート値の30 kg·cm をわずかに上回り、適切に設定すれば STS-3215 が定格仕様を超える性能を発揮することを確認しました。
一定負荷下の温度
Test 1: 静的負荷保持中の過熱チェック。
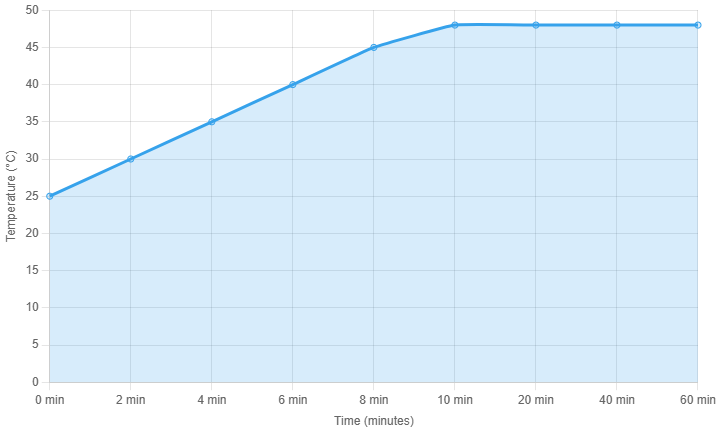
静的負荷過熱試験。Feetech STS3215
ダンベルを付けたアームを横向きに設置し、15 cm のレバーアームで1 kg の重りを保持して、15 kg·cm のトルクを発生させました。10分間で温度は48°C まで上昇し、その後1時間にわたってそれ以上上がることなく安定していました。
テスト2: ±90度範囲での揺動。温度測定
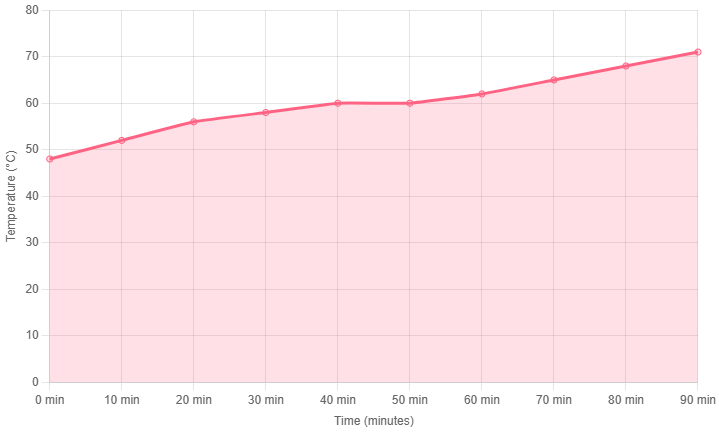
±90度範囲での揺動。温度試験。Feetech STS3215
48°C から始まり、温度は50分後に60°C に達しました。次の20分間、温度は上昇しませんでした。その後、発熱を早めるため揺動速度を下げました(下記の注記を参照)。71°C に達するにはさらに40分を要し、その時点でモーターは過熱しました。
- 臨界温度のしきい値:71°C でモーターは不具合を示します。これは昨日と今日に行った実験(2件)で観察されました。組み込みの熱保護はないようなので、この温度に達したら手動での停止が必要になります。
- 加速度が発熱に与える影響:加速度を下げると温度上昇率が高まりました。当初、加速度5では温度は60°C に達しました。加速度を2まで下げると、追加の時間を経て過熱に至りました。明日の追加試験では、加速度5で過熱するまでの時間を測定します。加速度2は私たちの用途には遅すぎるためです。
バックラッシュ補償の実験
ソフトウェアエンジニアのボリスが行った追加実験は、2つのサーボによる予張力構成を用いたバックラッシュ補償に焦点を当てました。この試験では、2つの Feetech STS-3215 サーボに3Dプリントした PETG 製のレバーアームを取り付け、張ったロープで連結しました。各サーボがわずかな予荷重をかけ、リンク機構内の機械的な遊びを効果的に取り除きました。
この構成はシンプルですが、予張力が実際にどのようにバックラッシュを解消するかを示すうえで非常に効果的です。両方のサーボが互いに逆向きの張力をかけると、アームは完全に静止したままとなり、機械的な遊びが完全に補償されたことを確認できました。この方法は位置の安定性と精度を大幅に向上させるため、ロボットの関節、モーション制御システム、DIYの自動化プロジェクトに特に有用です。
要点:
- PETG 製レバーアームを備えた2つの STS-3215 サーボ
- 制御された予張力下のロープ連結
- 予荷重補償による機械的バックラッシュの解消を実証
仕様と試験結果のまとめ
| パラメータ / 試験方法 / 条件 | 測定結果 | 仕様 / データシート値 | 備考 / コメント |
|---|---|---|---|
| 動作電圧 | 12 V | 12 V | 動作範囲:4〜14 V |
| 静的(ストール)トルク はかり上で45° の角度の10 cm レバーアーム | ~3.5 kg (35 kg·cm) | 30 kg·cm | 定格よりわずかに高い。長時間負荷で保護に入る |
| 動的トルク 10 cm レバーで1.5 kg を持ち上げ | +15 °C の上昇で負荷を支持 | — | 10分後に温度が+15 °C 上昇。2 kg 負荷で過負荷が作動 |
| 無負荷速度(RPM) 100%および50%速度で測定 | 最大 ~46 RPM、精度 ±2%、変動 ~7% | 45 RPM (0.22 s/60°) | 標準設定。動作はやや滑らかさに欠けるが許容範囲 |
| エンコーダー分解能 UART レジスタ読み出し | 1回転あたり4096ステップ(12ビット) | 12ビット磁気エンコーダー(4096) | 1ステップ0.088° |
| ギアボックスのバックラッシュ(遊び) 手による自由回転測定(ダイヤルゲージ法) | ~ 0,87° | ≤ 0.5° | — |
| 負荷時の位置誤差 1.5 kg 負荷、10 cm レバー、45° の角度 | 20〜30エンコーダー値(1.8〜2.6°) | — | 負荷時に誤差が大幅に増加 |
| 再現性(ダイヤルゲージ) 10 cm レバー垂直、20ステップ刻み、各方向3サイクル、3回反復 | 測定点での偏差 ±0.3 mm | — | スプリングプローブが機械的な遊びを補償する。テストはさらに精緻化、または負荷下で実施可能 |
| 温度上昇(静的負荷試験) — 15 cm レバーアームで1 kg 負荷(≈15 kg·cm のトルク)、アームは横向きに設置 | 10分後に温度は48 °C まで上昇し、それ以上上がることなく1時間以上安定 | 動作温度範囲:–10 °C 〜 60 °C | 静的負荷下で安定した熱挙動。定格動作限界に十分収まる |
| 温度上昇(揺動試験) — ±90° 範囲、連続動作、初期温度48 °C | 50分後に60 °C に達し、20分間安定した後、~110分後に71 °C まで上昇し、過熱に至る | 過熱保護のしきい値:70 °C | 能動的な熱停止は観察されず、70 °C 付近で手動の遮断が必要。加速度を下げると発熱率が高まった(accel = 2 → 過熱、accel = 5 → 安定 ~60 °C)。 |
| 通信インターフェース | UART TTL、半二重 | 動作する | 38400 bps 〜 1 Mbps(既定値1 Mbps)。複数サーボの連鎖接続が可能 |
| クローズドループ制御 | 位置と速度のフィードバックが確実に動作 | — | 位置保持と速度制御に対応 |
| テレメトリ / フィードバック | UART 読み出し:位置、速度、電流、電圧、負荷、温度 | — | 完全なテレメトリが利用可能 |
| 保護システム | 過負荷、過電流、過電圧、低電圧、過温度 | 動作する | レジスタを介して設定可能なタイムアウトと安全上限 |
| ファームウェアの不感帯 | 指令入力 < 10エンコーダーステップ | 動作は観察されない | 組み込みの10カウント不感帯 |
| 価格 / アクセサリ | — | ~$15(サーボ)+ ~$5(UART アダプター) | 優れたコストパフォーマンス |
まとめ
Feetech STS3215 は優れたトルク性能と安定した UART 通信を示し、中級クラスのロボティクスや自動化用途に適しています。ただし、機械的なバックラッシュとファームウェアで定義された不感帯(エンコーダー10カウント)が、精密な動作タスクにおける位置決め精度を低下させます。
主な利点
- コンパクトで軽量
- 組み込みのクローズドループ制御(位置と速度)
- 統合されたテレメトリと保護機能
- 簡単なパラメータ調整と UART プロトコル
- 複数サーボのデイジーチェーン接続に対応
- 十分なエンコーダー精度(4096ステップ)
- PC やマイコンから直接制御可能
主な制約
- ギアボックスのバックラッシュが仕様より大きい
- ファームウェアはユーザーによる更新不可
- 長期摩耗の評価には負荷持続試験が必要
- 聞き取れる機械的ノイズ
とりあえずベンチ環境一式真似させてもらいます最高の資料でした本当にありがとうございました大切に使わせていただきます
数字並べてるだけかと思ったらちゃんと測定治具まで写真載ってて好感持てた
こういう地味だけど大事な検証ほんと貴重
うーんトルク公称値とのギャップが大きい気が…まあサーボあるあるだけど
PID調整のパラメータ公開してほしいです次回でいいので
神記事
デイジーチェーンで何個までまともに動きました?
半二重TTLシリアルのバスで複数台をデイジーチェーン接続できますが、安定して回せる台数は配線長と電源容量で決まります。台数が増えるほど電源側の余裕が効いてきます。
納得しました、ありがとう。
負荷かけたときの位置保持力ってどう測定したんですか錘ぶら下げる感じ?
出力軸にトルクアームを付けて既知の錘を吊り、保持できる最大モーメントを記録しました。おっしゃる通り錘方式です。
とても丁寧な検証で勉強になりました。特に温度上昇とトルク低下の相関を示してくださった点が実用上ありがたいです。
繰り返し位置決め精度ってどのくらいの試行回数で測りましたか?
標準偏差が安定するよう、同一ポジションへの往復を十分な回数繰り返して記録しています。試行回数が少ないと値がばらつくためです。
ありがとう、よく分かりました!
測定おつかれさまです細かいデータありがとうございます助かります
丁寧な測定方法の記述に感銘を受けました。再現実験ができる形で公開してくださり感謝いたします。
トルク測定のときの電源電圧は何Vでやってますか?
12.0Vの定電圧電源で測定しています。データシート公称も12Vなので比較しやすいです。
納得しました、ありがとう。
バックラッシュのデータ、めちゃくちゃ参考になりました!!! ちょうど今STS3215で多関節アーム組んでて末端のガタが気になってたところです
発熱どんな感じでした連続運転だと結構熱くなるイメージ
定格付近の連続運転ではそれなりに発熱します。内部が約70度に達すると過熱保護が働くので、高負荷を続ける場合は放熱に気を配ると安心です。
なるほど、回答ありがとうございます。
正直STS3215は値段なりだと思ってたけどこのデータ見ると思ったよりちゃんとしてるな見直したわ繰り返し精度のグラフが特に説得力ある
ロボアーム自作勢にはたまらん内容
正直この値段でこの精度ならコスパ最強だと思うw 中華サーボ侮れない
再現性は良い。トルクは微妙。
バックラッシュって減速比のせいなのか出力軸のガタなのかどっちが支配的なんでしょう
実測ではギアトレインのバックラッシュが支配的で、出力軸ベアリングのガタの寄与は小さめでした。1:345の高い減速比なのでギア段の積み重ねが効いてきます。
うちでも同じ個体使ってるんですけど個体差けっこうあって同ロットでもバックラッシュ0.3度くらいばらつくのでベンチするなら複数個まとめて測ったほうがいいと思います一個だけだと結論出しにくいですよね
グラフのy軸の単位が一部抜けてる気がします本文はとても良かったです
これは保存版ですわ。serial busで複数つないだときの応答遅延も知りたかったけど贅沢か。
うちの環境だと低速域でカクつくんですよね同じ症状の人いません?ファーム最新なんだけど
低速域のカクつきは内部の最小指令分解能に起因することが多いです。中間補間を有効にするか指令の更新周期を上げると改善する場合があります。
まさに知りたかったことです。
ホーミング後のゼロ点ってどれくらい再現します?電源入れ直すたびにズレない?
STS3215は12ビットの磁気アブソリュートエンコーダ(分解能0.088度/ステップ)なので、電源を入れ直してもゼロ点は保持されます。実測でも再現性は良好でした。
とても助かりました、感謝します。
サンプリングレートはいくつで取得してますか?
サーボ内部では高速にフィードバック制御していますが、今回はバス経由で一定周期にて状態を読み出して記録しています。バスの読み出し周期は内部制御周期より低くなります。
図3のヒステリシスループ綺麗すぎて感動した笑 ここまでくると芸術