負荷下での Waveshare シリアルバスサーボ駆動基板の試験
 577
577

この試験の目的は、通常運用から最悪の場合のピークシナリオまで、さまざまな負荷条件のもとで各種サーボ駆動基板がどのように動作するかを評価することです。これにより、特にロボットアームが突発的または持続的な高負荷を受ける場合に、実環境での信頼性の高い動作を確保するのに役立ちます。
私たちのプロジェクトでは、通常1システムあたり最大6個のサーボを使用します。構成によっては、Feetech STS3250 と STS3215 のサーボを混在させる場合があります。STS3250 の停動電流は約4.2 A、STS3215 は約2.7 A です。混在構成では、特に同時動作時や停動に近い状態で、合計の電流需要が大幅に増加することがあります。
一方で、メーカーは駆動基板の許容電力に関する明確で詳細な仕様を提供していないため、ドキュメントだけで安全な動作限界を判断するのは困難です。これらの基板が実環境でどのように振る舞うかを、定格動作からより厳しい負荷シナリオまで理解するには、実地の試験が必要です。
4つの負荷試験シナリオを評価しました。
- 高い連続負荷 — 2 A を10分間。 通常の動作条件では、ロボットアームがこのレベルを超えることは想定されません。基板が過熱せずに典型的な負荷に耐えられることを確認します。
- 最大連続負荷 — 5 A を5分間。 複数のサーボが同時に動作する多くの実環境シナリオで、実用上の上限に近い高負荷下での持続的な動作です。
- ピーク負荷 — 7 A を2分間。 想定される最大ピークです。実際には、アームが厳しい条件下でこのレベルに達するのは短時間のバースト(1〜2秒)のみですが、長めの持続時間で試験することで追加の安全マージンが得られます。
- 電源装置の上限 — 10 A を30秒間。 電源の電流制限に達する故障または極限状態を模擬します。基板はこのシナリオに損傷なく耐えることが期待されます。
比較には、市販されている2枚の基板を含めました。
- Waveshare Serial Bus Servo Driver Board — シリアルバスサーボ向けのコンパクトで手頃なコントローラーで、低価格帯に属し、一般的なロボティクスプロジェクト向けです。
- Waveshare Serial Bus Servo Driver HAT — サーボ制御をホストシステムと直接統合する Raspberry Pi 互換の HAT で、組み込みや SBC ベースのロボティクス構成に便利であり、価格も手頃です。
すべての試験は、周囲温度約26 °C で実施しました。実際の使用ケースを忠実に再現するため、負荷は純正のモーター配線を用いて並列のモーターコネクタ経由で接続しました。すべての試験を通じて、12 V に設定した単一のベンチ電源を一貫して使用しました。負荷としては調整可能な500 W の LiPo バッテリー充電器を用いました。2 A の試験には、35 W の電子負荷を使用しました。
2 A 連続負荷試験に使用したベンチ構成。35 W の電子負荷が、安定化された12 V のもとで基板のモーターコネクタを通じて電流を引きます。 |

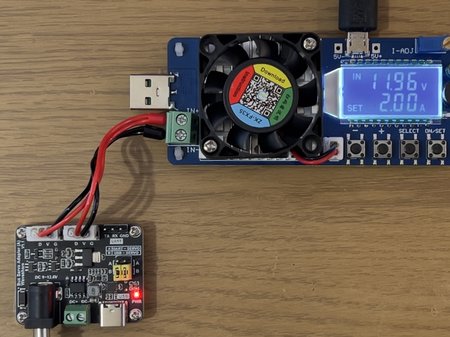
高電流シナリオに使用したベンチ構成。調整可能な500 W の LiPo バッテリー充電器が負荷として動作し、単一のベンチ電源から基板の並列モーターコネクタを通じて12 V で給電されます。 |
試験構成。左:2 A 負荷試験、右:5 / 7 / 10 A 負荷試験。
すべての試験を通じて、潜在的なホットスポットを特定し安全な動作限界を確認するため、サーマルカメラを用いて基板の主要部品の温度を監視しました。
Waveshare Serial Bus Servo Driver Board
Waveshare Serial Bus Servo Driver は、Feetech STS および Waveshare ST シリーズのシリアルバスサーボ向けに設計されたコンパクトなコントローラーです。ホスト PC に直接接続するための USB Type-C インターフェースを備え、開発やテストに便利です。基板は2種類の電源入力(5.5×2.1 mm のバレルジャックとネジ端子)を備え、電源構成に応じた柔軟性を提供します。USB インターフェースに加えて専用の UART 出力を備えており、組み込み用途で基板を外部マイコンに接続できます。
リビジョン
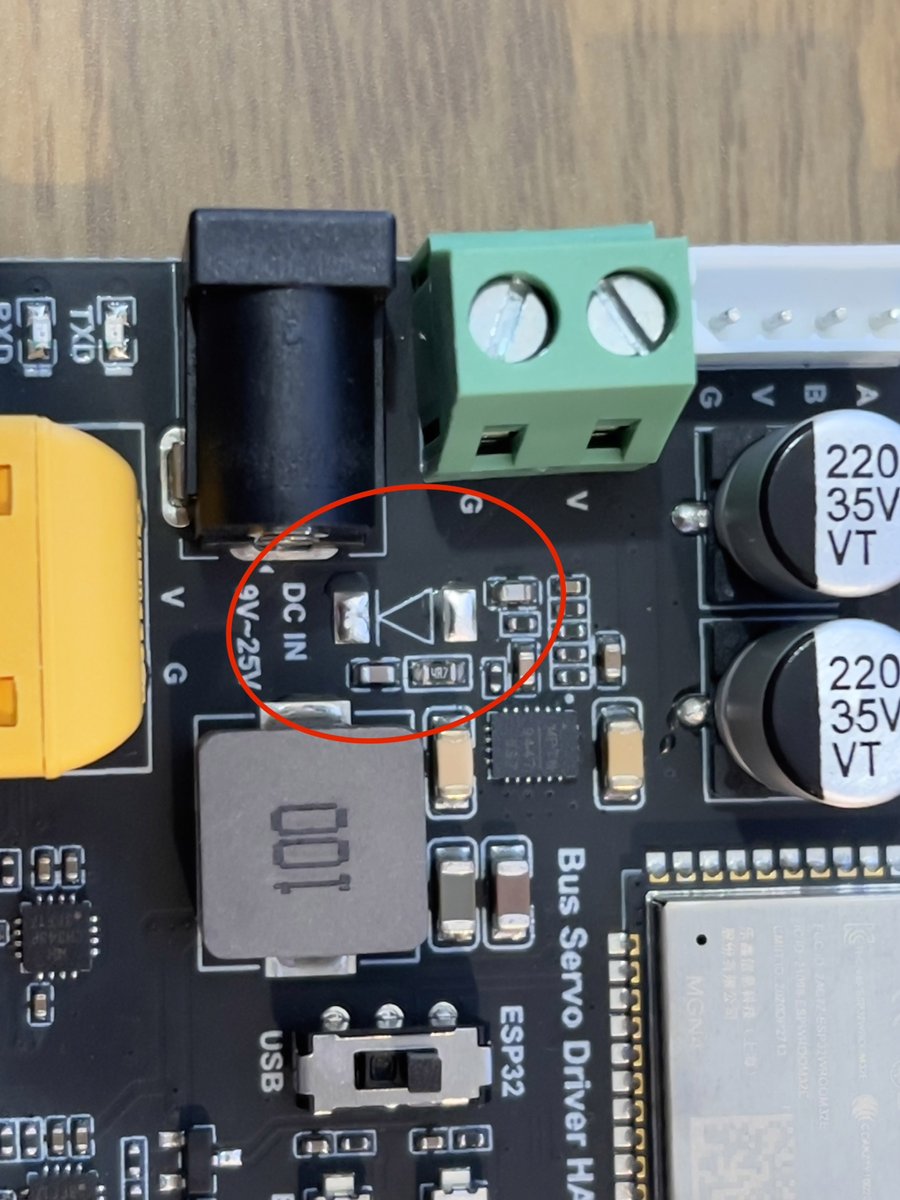
この基板には少なくとも2つのリビジョンがあります。リビジョン1.1(既知の最新リビジョン)には追加の TVS ダイオードが含まれています。このダイオードは電源品質に比較的敏感なようで、電源コネクタが緩んでいたり接触不良だったりすると焼損することがあります。ダイオードが焼損した場合は、完全に取り外すことで基板の機能を回復できます。

基板のリビジョンを並べて比較:オリジナルの v1.0(左)と v1.1(右)。赤い四角は v1.1 で追加された TVS ダイオードを示します。

TVS ダイオードが故障した後のリビジョン1.1 基板のクローズアップ。焼損したダイオードは物理的に取り外すまで基板を機能停止させます。 |
故障した TVS ダイオードを物理的に取り外した同じ基板 — 保護回路なしで基板は正常な動作状態に戻ります。 |
TVS ダイオードを備えた基板リビジョン1.1。左:ダイオードが焼損。右:機能を回復するためダイオードを取り外した状態。
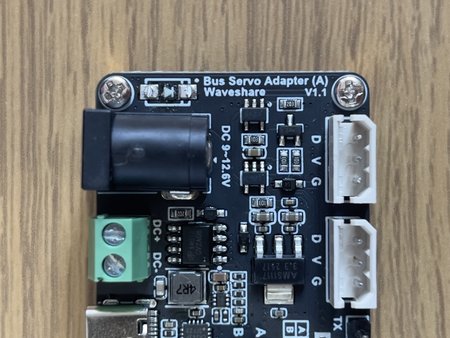
電源コネクタ
基板は2種類の電源入力を備えています。5.5×2.1 mm のバレルジャックとネジ端子です。両方のコネクタは同じ目的を果たしますが、基板上ではわずかに異なる経路をたどるため、負荷下での挙動には顕著な違いが生じます。
バレルジャック(5.5×2.1 mm): モーター出力への直接的な電源経路を提供します。プラス端子とマイナス端子の両方がモーターコネクタのピンに直結され、2つのモーターコネクタは並列になっています。これにより経路上の電圧降下と発熱が最小限に抑えられ、高電流負荷に対してより堅牢な選択肢となります。
ネジ端子(DC+ / DC−): 代替の入力方法を提供しますが、電源経路に追加の部品が挿入されます。モーター出力に直接給電するのではなく、入力電源はモーターコネクタに到達する前に MOSFET を経由します。高負荷下では、この MOSFET が大きな熱源となり、全体の効率と熱特性に影響を及ぼす可能性があります。端子は公称で最大10 A まで定格されていますが、比較的小型であるため、実際には持続的な高電流動作にはあまり適していません。
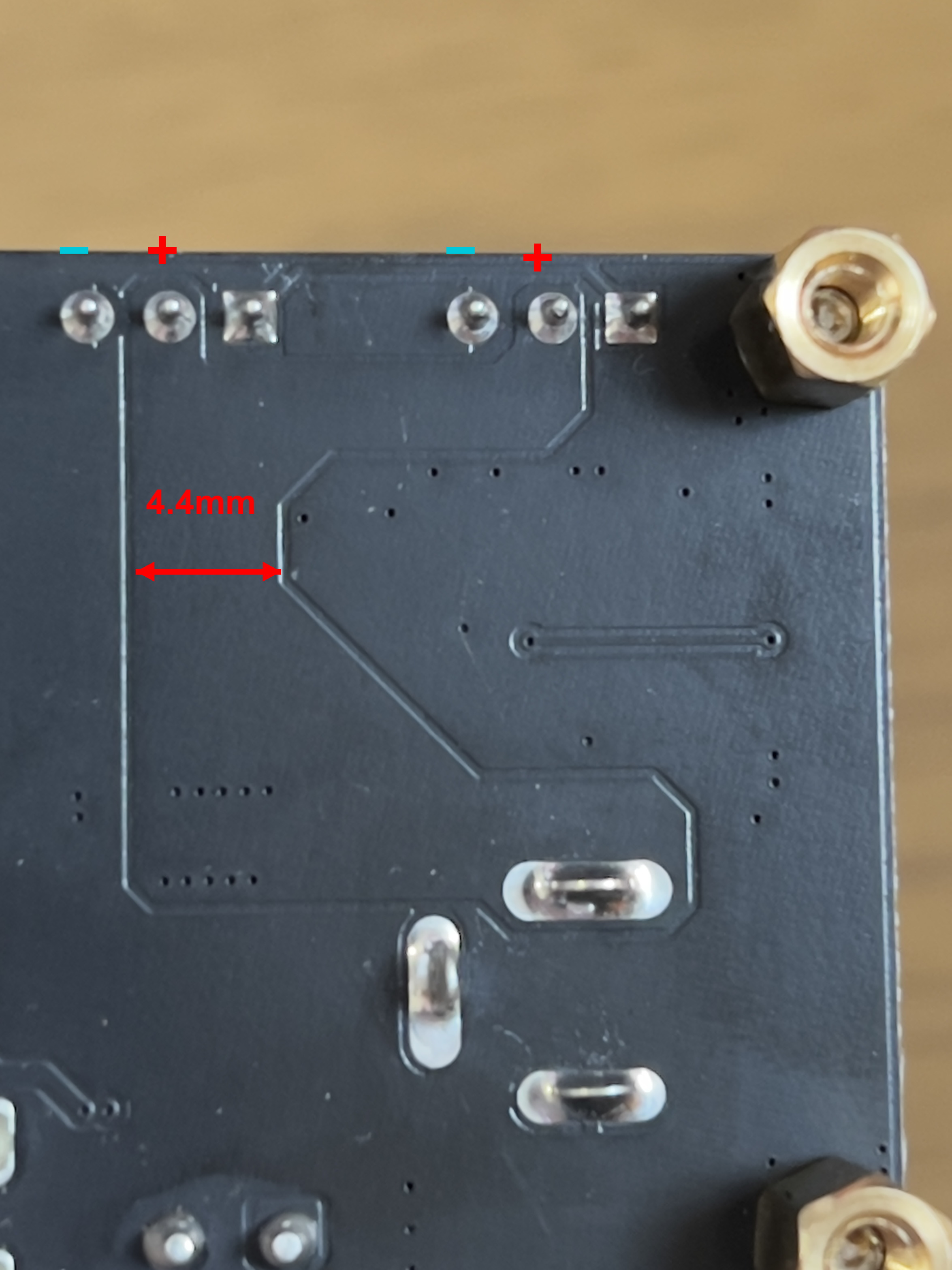
DC+ の銅ポリゴンは幅4.4 mm で、ピーク負荷電流に問題なく耐えられると見込まれます。+ / − の表示はネジ端子の極性を示します。
負荷試験
電源回路の違いにより、バレルジャック入力とネジ端子入力で別々に試験を実施しました。
2 A 負荷を10分間
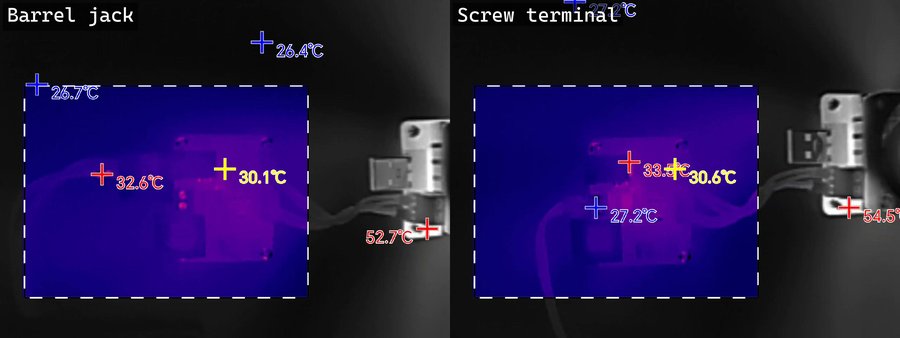
2 A / 10 分試験の終盤におけるサーマル画像を並べたもの。両方の経路とも30〜33 °C にとどまり、この負荷では有意な差はありません。
左:バレルジャック。右:ネジ端子。
2 A の連続負荷試験では問題は見られませんでした。基板はほとんど発熱せず、大半の部品は周囲温度に近いままでした。サーマルイメージングでは、基板全体でわずかな温度上昇(通常30〜33 °C の範囲)のみが確認され、通常の動作条件下での電力損失が小さく、電流処理が効率的であることを示しています。
5 A 負荷を5分間
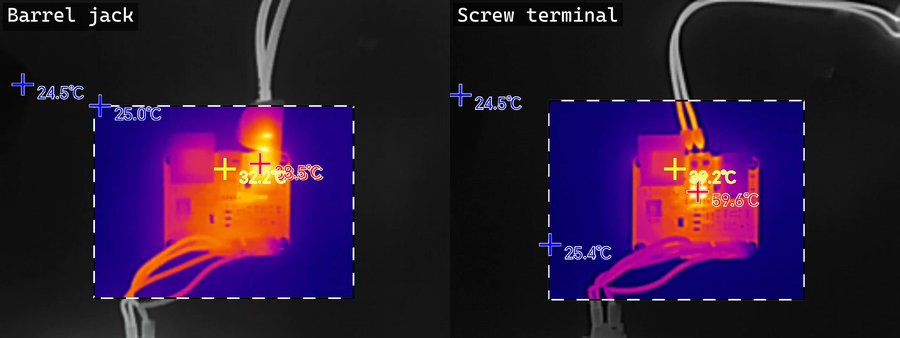
5 A / 5 分試験の終盤におけるサーマル画像を並べたもの。バレルジャック(左):コネクタ約38〜40 °C。ネジ端子(右):MOSFET 約60 °C で、主要な熱源。
左:バレルジャック。右:ネジ端子。
バレルジャック経由で給電すると、コネクタ自体が顕著に発熱し、約38〜40 °C に達しました。基板の他の部分は比較的低温のままで、大半の部品は30〜32 °C 付近にとどまりました。これは、この構成における主な制約が、基板内部の電源経路ではなく、コネクタとその接触抵抗であることを示しています。
ネジ端子を使用した場合、熱的な挙動は基板上の MOSFET によって支配されました。その温度は負荷下で比較的速く上昇し、数分後に約60 °C で安定しました。基板の他の領域は中程度の暖かさ(30〜40 °C)にとどまりました。これは、この構成では MOSFET が電力消費と発熱の主な源であることを裏付けています。
全体として、どちらの入力方式も即座の故障なく5 A の負荷を処理しましたが、熱的なボトルネックは異なります。バレルジャックはコネクタの発熱によって制限され、ネジ端子経路は MOSFET の損失によって制限されます。
7 A 負荷を2分間
7 A / 2 分試験の終了時のサーマル画像を並べたもの。バレルジャック(左):コネクタ約46 °C。ネジ端子(右):MOSFET 約78〜80 °C で、長期信頼性の限界に近づいています。
左:バレルジャック。右:ネジ端子。
バレルジャック経由で給電すると、コネクタの温度が大幅に上昇し、約45〜46 °C に達しました。基板の他の部分は比較的低温(約34 °C)のままで、この構成ではコネクタ自体が主な熱的ボトルネックであることが確認されました。基板の電子部品は負荷を十分に処理しましたが、電流が大きくなるとコネクタの発熱がより顕著になります。
対照的に、ネジ端子を使用した場合、MOSFET の温度は急激に上昇し、約78〜80 °C に達しました。これは一般的なデータシートで規定される上限に近く、温度の上昇が部品特性と長期信頼性に影響し始める可能性があります。この負荷では端子の配線も顕著に発熱しました。
もう一つの実用上の制約はネジ端子のサイズで、これにより太い配線の使用が制限され、配線抵抗の増加を通じて発熱の一因となります。
全体として、7 A ではシステムは熱的限界に近づきます。バレルジャックはコネクタの発熱によって制約され、ネジ端子経路は MOSFET の放熱と配線の制約によって制限されます。
10 A を30秒間
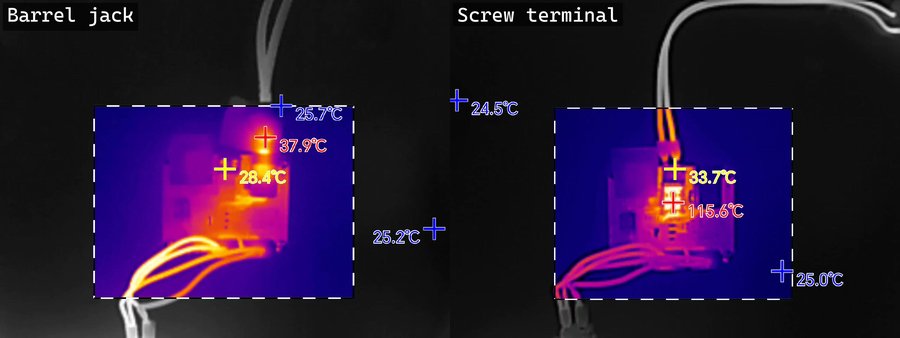
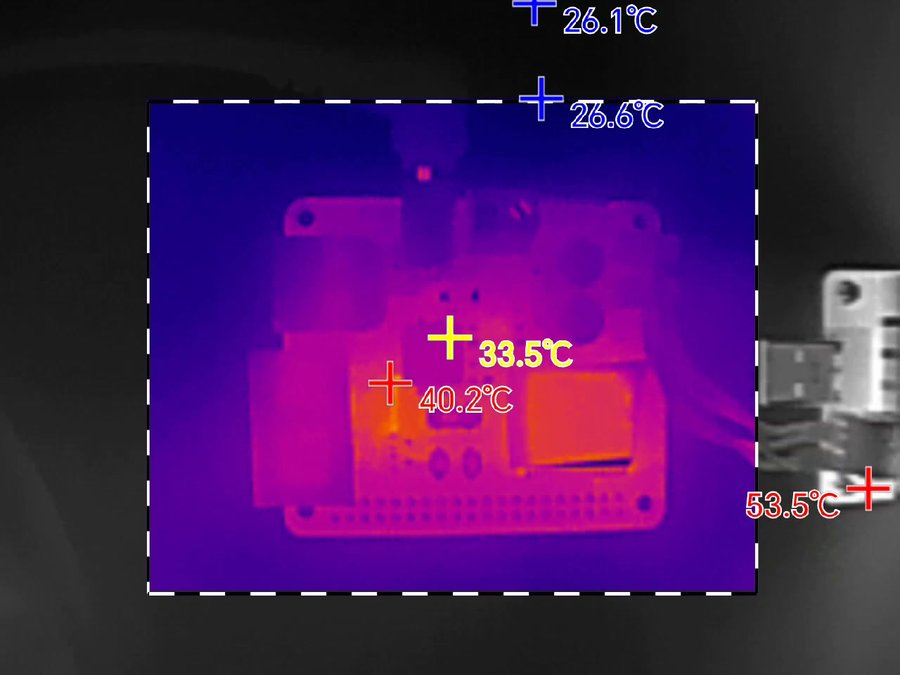
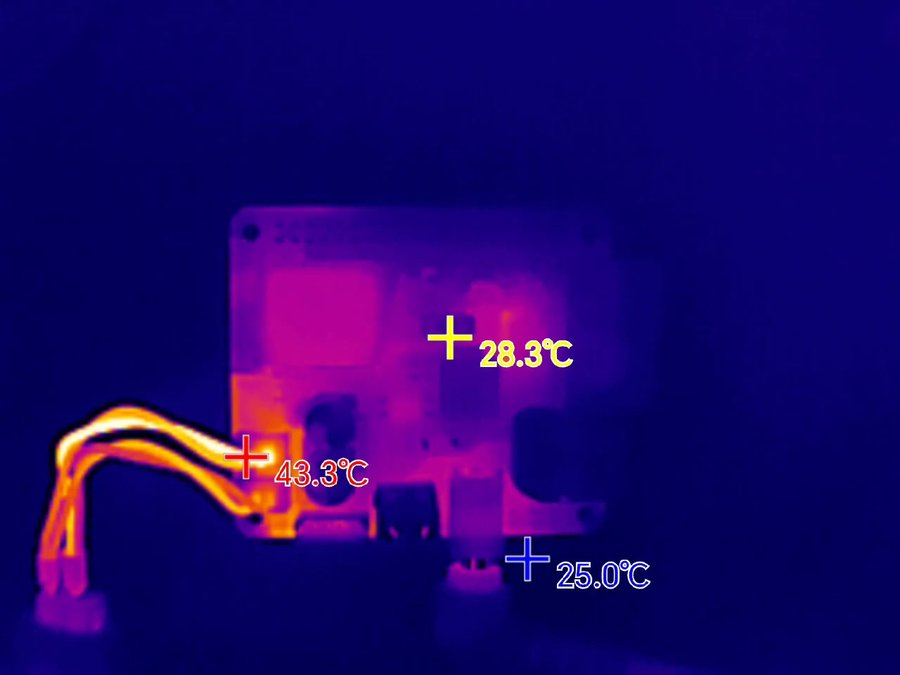
10 A / 30 秒試験の終了時のサーマル画像を並べたもの。バレルジャック(左):ピーク37.9 °C。ネジ端子(右):MOSFET 上で115.6 °C — 安全な動作限界を大きく超えています。
左:バレルジャック。右:ネジ端子。
10 A 試験(30秒)は極限状態を表しており、基板の快適な動作範囲を明らかに超え、その故障限界を露わにします。
バレルジャック経由で給電すると、主な問題は配線へと移りました。この負荷ではモーター配線が顕著に発熱しましたが、基板自体は比較的影響を受けませんでした。コネクタ周辺でも温度上昇(40〜45 °C)が見られましたが、PCB 上に致命的なホットスポットは観測されませんでした。この構成では、基板自体より先に外部配線が制限要因となります。
対照的に、ネジ端子経路では MOSFET に深刻な熱ストレスが見られました。その温度は急速に安全な動作限界を超え、100 °C を大きく上回りました(この試験では約120 °C)。このレベルでは、デバイスは推奨条件をはるかに超えて動作しており、性能劣化、熱暴走、または恒久的な損傷が発生する可能性があります。
全体として、結果は10 A での動作が持続不可能であること、特にネジ端子入力を使用した場合にそうであることを裏付けています。MOSFET が致命的な弱点となる一方、バレルジャック構成では制限が PCB 自体ではなくコネクタと配線へと移ります。
結論
Waveshare Serial Bus Servo Driver は、典型的な動作条件と中程度の負荷のもとでは良好に動作します。2 A、さらには5 A の連続負荷でも、基板は安定して熱的にも問題なく、ほとんどの標準的なロボティクス用途に適しています。
しかし、電源入力の選択は性能に大きな影響を与えます。バレルジャックはより直接的で効率的な電源経路を提供し、主な制限は高電流時のコネクタと配線の発熱です。対照的に、ネジ端子入力は電源経路に MOSFET を挿入し、これが主な熱源となり、負荷下で明確なボトルネックとなります。
より高い電流(7 A 以上)では、両方の構成とも熱的限界に近づき始めます。バレルジャックはコネクタの発熱によって制約され、ネジ端子経路は MOSFET の放熱と配線の制約によって制限されます。極限条件(10 A)では、基板は安全限界を超えて動作します。特にネジ端子を使用した場合、MOSFET の温度が安全な動作範囲を超えます。
もう一つの信頼性に関する懸念は、リビジョン1.1 基板に搭載されている TVS ダイオードです。試験中に複数の基板が故障しましたが、その原因はおそらく電源の不安定さや過渡的な状態にあります。これらのケースでは TVS ダイオードが故障(焼損)したと見られ、実質的に基板を機能停止させました。故障したダイオードを取り外せば機能を回復できますが、この挙動は、保護回路が不安定な電源環境に対して過敏である、あるいは十分に堅牢でない可能性を示唆しています。
実用的には、この基板は連続負荷で約5 A まで、たまに短いピークがある程度のシステムに適しています。より高い負荷の場合は、電源品質、配線、コネクタの選定に細心の注意を払う必要があります。可能な限り、高電流用途にはバレルジャック入力が望ましい選択肢であり、ネジ端子はより低い電流や利便性重視の構成に適しています。
全体として、この基板は機能とコストの良好なバランスを提供しますが、その電力処理能力と堅牢性は、コネクタの設計、電源経路の実装、および電源の過渡変動に対する感度によって制限されます。
Waveshare Serial Bus Driver HAT
- ドキュメント: https://www.waveshare.com/wiki/Bus_Servo_Driver_HAT_(A)
- 回路図: Bus Servo Driver HAT (A) の回路図/Bus_Servo_Driver_HAT_(A)_Sch.pdf)
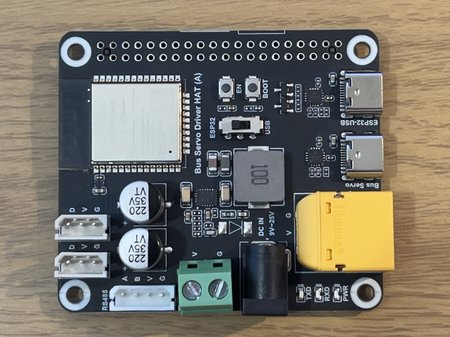
Waveshare Driver HAT の表面:ESP32 マイコン、RS485 / TTL 出力段、および3つの電源入力(5.5×2.5 mm バレルジャック、ネジ端子、XT90)。 |
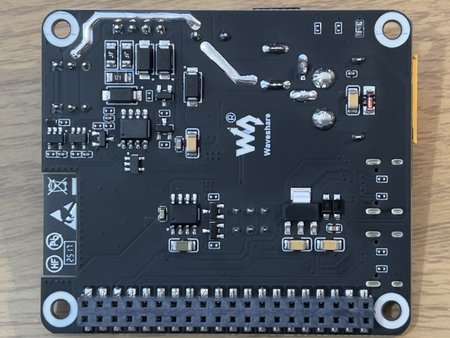
Driver HAT の裏面。40ピンの Raspberry Pi ヘッダーと、Pi に給電する基板上の5 V レギュレータが見えます。 |
Driver HAT、表面(左)と裏面(右)。
Waveshare Serial Bus Servo Driver HAT は、よりシンプルなアダプタ基板に比べて、より高度で高電力志向のソリューションです。ESP32 マイコンを統合しており、有線および無線(Wi-Fi / Bluetooth)通信機能を備えた自立型コントローラーとして動作できます。基板は Raspberry Pi HAT として設計され、40ピンヘッダーを介して直接接続できると同時に、基板上の5 V レギュレータを通じて Pi へ給電します。TTL と RS485 の両方のサーボインターフェースに対応しており、より幅広いシリアルバスサーボと互換性があります。電源の観点では、この基板は XT90 コネクタや9〜25 V の広い入力範囲を含む、はるかに堅牢な入力オプションを提供します。
電源コネクタ
この基板は複数の電源入力オプションを提供します。5.5×2.5 mm のバレルジャック、(前の基板に比べて)より大きいネジ端子、そして高電流用途向けの XT90 コネクタです。これらのコネクタはすべて同じ電源バスに接続されており、電源経路に MOSFET などの追加部品は挿入されていません。これにより、負荷への直接的で低抵抗の接続が実現し、より大きな電流の処理に有利です。

3つの電源入力はすべて、経路に MOSFET のない単一の低抵抗電源バスに給電します。より大きいネジ端子と XT90 コネクタは、高電流用途向けの太い配線を受け入れます。
より大きいネジ端子と XT90 コネクタにより、この基板は前の基板で使われていた小型コネクタに比べて、太い配線とより大きな電流供給に適しています。
PCB には TVS ダイオード用のフットプリントが確保されていますが、ダイオード自体は実装されていません。過渡保護は設計時に検討されたものの、この基板には搭載されていません。
PCB には TVS ダイオード用のフットプリントが含まれていますが、ダイオード自体は実装されておらず、過渡保護は設計時に検討されたものの、出荷版では実装されていないことを示唆しています。
負荷試験
すべての電源コネクタは同じ電源経路を共有しており、それらの間に機能的な違いがないため、すべての試験はバレルジャック入力を使用して実施しました。
2 A 負荷を10分間
2 A / 10 分時点の試験終了時サーマル画像。発熱が見られるのは ESP32 モジュールと基板上の5 V レギュレータのみ(約33〜40 °C)で、電源経路は低温のままです。
2 A の負荷試験(10分間)では、熱的な懸念は見られませんでした。基板全体の温度は周囲温度に近いままで、わずかな発熱のみが観測されました。
顕著な温度上昇を示した部品は ESP32 モジュールと基板上の電圧レギュレータのみで、約33〜40 °C に達しました。これは、両者とも電源の調整と制御に積極的に関与しているため想定どおりです。電源経路やコネクタでは大きな発熱は観測されず、典型的な負荷条件下での効率的な動作を示しています。
5 A 負荷を5分間
5 A / 5 分時点の試験終了時サーマル画像。挙動は2 A のケースと本質的に同じで、ESP32 とレギュレータがわずかに暖かく、電源バスとコネクタは周囲温度に近い状態です。
5 A の負荷試験(5分間)は2 A のケースと同様の挙動を示し、大きな熱的問題は観測されませんでした。基板全体の温度はわずかに上昇しましたが、安全限界内に十分とどまりました。主な熱源は再び ESP32 モジュールと基板上の電圧レギュレータでした。電源入力経路とコネクタは比較的低温のままで、損失が小さく電流処理が効率的であることを示しています。
全体として、基板は熱ストレスの兆候を一切示すことなく5 A の連続負荷を処理しており、典型的な使用ケースにおける持続的な高負荷動作に適していることを示唆しています。
7 A 負荷を2分間
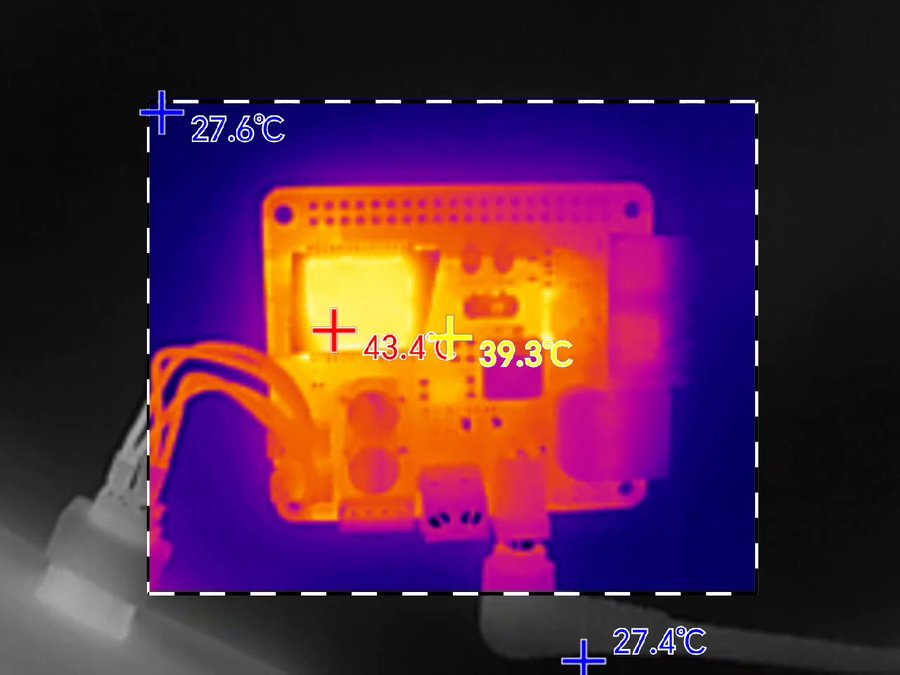
7 A / 2 分時点の試験終了時サーマル画像。すべての基板部品は安全範囲内にとどまり、注目すべき発熱はモーター配線上のもの(約42 °C)のみです。
7 A の負荷試験(2分間)では、すべての基板部品が安全な温度範囲内にとどまりました。モーター配線がわずかに暖かくなり、約42.2 °C に達しました。
10 A を30秒間
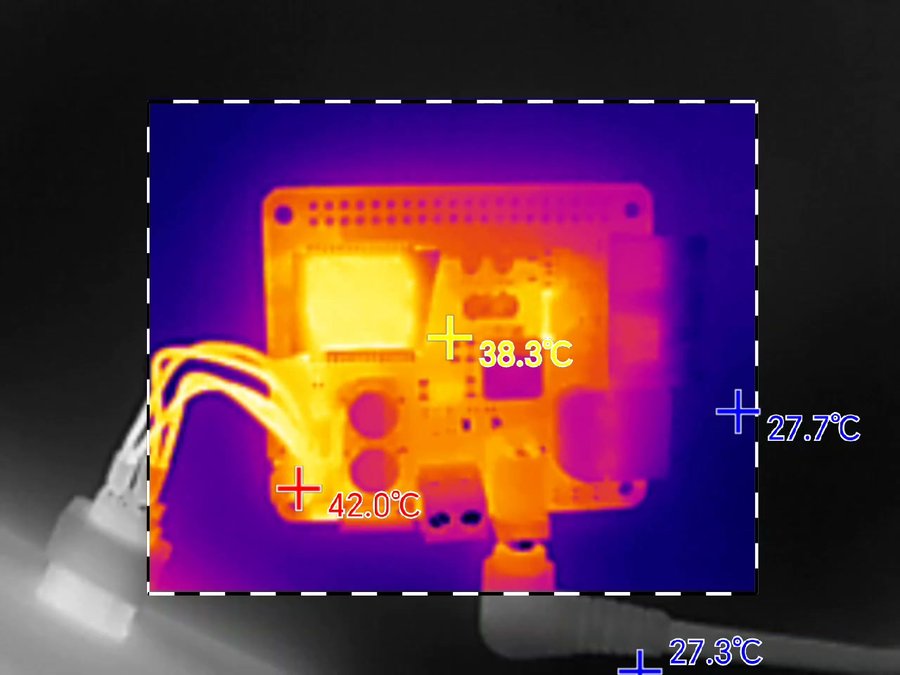
10 A / 30 秒時点の試験終了時サーマル画像。基板自体は低温のままで、唯一の顕著な発熱はモーター配線上の約44.6 °C です。
10 A の負荷試験(30秒間)の間、すべての基板部品は安全な動作温度内にとどまりました。唯一の顕著な発熱はモーター配線で、約44.6 °C に達しました。
結論
Waveshare Serial Bus Driver HAT は明らかに高電流用途を念頭に設計されており、よりシンプルなアダプタ基板に比べて負荷下で大幅に優れた性能を発揮します。2 A から10 A までのすべての試験を通じて、基板自体は熱的に安定したままで、電源経路や制御回路に致命的なホットスポットは観測されませんでした。
(MOSFET などの追加部品のない)直接的な電源バス設計のおかげで、基板は大電流を効率的に処理し、より大きいコネクタにより堅牢な電力供給に適しています。
実際には、制限要因は基板自体ではなく外部部品、具体的にはモーターコネクタと純正配線です。電流が増加すると、発熱は PCB 上よりも主に配線で観測され、基板には十分な余裕がある一方で配線がボトルネックになることを示しています。
全体として、この HAT は複数サーボのシステムや高電流構成にとって堅実な選択肢です。適切な配線とコネクタを使用すれば、5〜7 A の範囲の持続的な負荷を余裕をもって処理し、最大10 A までの短いピークにも耐えられます。
コメントするにはログインしてください。