Construindo o futuro da robótica com hardware de código aberto
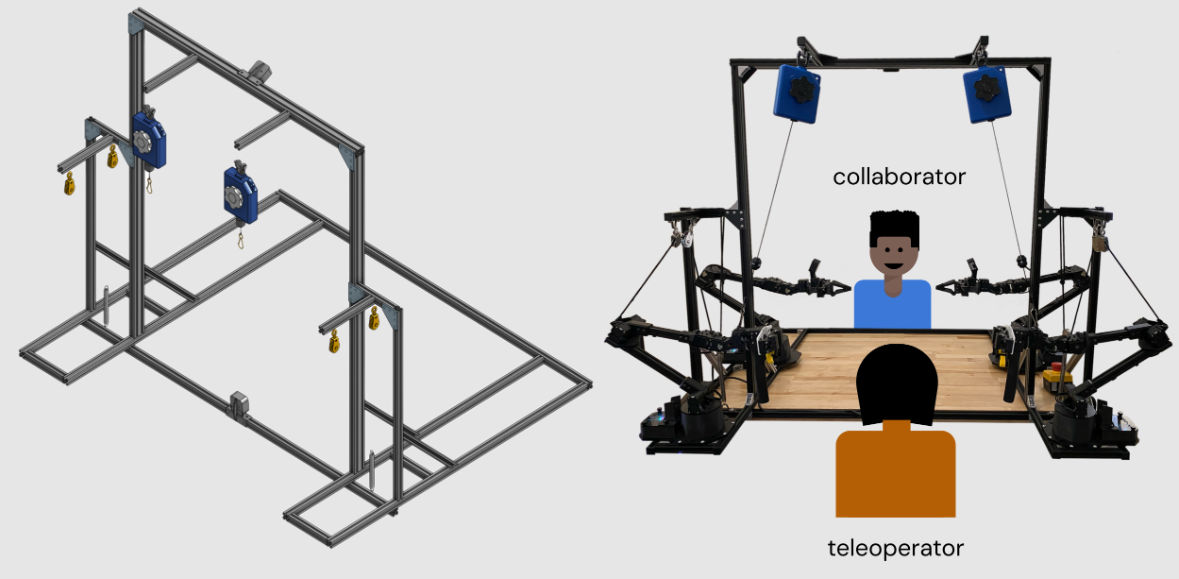
 2884
2884
Estamos no limiar de uma revolução do hardware de código aberto e, se você tem prestado atenção, dá para senti-la. O recente furor em torno do DeepSeek e da OpenAI não é só sobre modelos de IA — é um sintoma de uma mudança muito maior. O ethos da tecnologia aberta está se infiltrando em cada camada da engenharia, e a robótica é a próxima.
Yann LeCun, líder de pensamento na área da IA de código aberto, há anos prega a importância dos sistemas de código aberto, e ele tem razão: a tecnologia proprietária cria silos, mas a tecnologia de código aberto alimenta a inovação. O “momento Linux” do software abriu uma era de desenvolvimento exponencial, e agora a robótica está diante do mesmo precipício. Mas há um problema: enquanto o software floresceu em ecossistemas abertos, o hardware permaneceu acorrentado a ecossistemas proprietários, custos inflados e acesso restritivo.
Por que o hardware precisa do seu “momento Linux”
Durante décadas, a robótica ficou presa em um mundo onde a tecnologia de ponta estava trancada atrás de portas fechadas. Se você quisesse robótica de precisão, tinha de desembolsar uma fortuna por braços industriais de alto nível. Se quisesse experimentar com teleoperação, era obrigado a trabalhar dentro de sistemas caros e fechados que sufocavam a personalização e a experimentação. É um ecossistema que desencoraja o progresso de qualquer um fora de laboratórios de pesquisa bem financiados ou de grandes corporações.
O ALOHA 2 rompe esse paradigma. Não é apenas mais um projeto de pesquisa — é um passo ousado rumo à democratização da robótica. Com um design de hardware aberto, componentes modulares e a capacidade de igualar (ou até superar) sistemas proprietários caros, o ALOHA 2 cria uma plataforma em que a inovação não é limitada por barreiras pagas. Ele dá a desenvolvedores, pesquisadores e entusiastas independentes as ferramentas para impulsionar a robótica — assim como o Linux fez pelo software.

Este artigo é para quem entende — os construtores, os hackers, os que cresceram desmontando coisas só para ver como funcionavam. Vamos mergulhar nos problemas da teleoperação tradicional, nos avanços que o ALOHA 2 traz e em como o hardware aberto está lançando as bases para o futuro da robótica. Se você já sonhou em montar seu próprio sistema robótico de precisão, é aqui que começa.
A barreira de custo na teleoperação
Durante décadas, a indústria da robótica permaneceu cercada por custos proibitivos. Sistemas de teleoperação de grau industrial costumam ter preços acima de $100,000, impulsionados pela necessidade de atuadores de alta precisão, sistemas de controle proprietários e amplos requisitos de calibração.
Quando os fabricantes falam de teleoperação de “grau industrial”, na verdade falam de uma teia complexa de sistemas proprietários interdependentes. Um braço robótico básico com capacidade de teleoperação começa em $50K-80K, mas isso é só o começo. Adicione os sistemas obrigatórios de retorno de força ($20K+), as taxas anuais de licenciamento de software ($10K-15K) e o equipamento especializado de calibração, e você já está bem acima de $100K antes de escrever uma única linha de código. Mas os custos ocultos vão ainda mais fundo. A maioria dos sistemas exige programas de treinamento especializado ($5K por operador), recalibração regular por técnicos da fábrica ($2K-3K por visita) e contratos de manutenção que podem chegar a dezenas de milhares por ano. Isso não é só caro — é um modelo de negócio projetado para manter os usuários dependentes dos fornecedores até para modificações básicas.
Mesmo as montagens de pesquisa, que muitas vezes usam braços robóticos de gama intermediária, custam dezenas de milhares de dólares — e isso limita o acesso a instituições e corporações bem financiadas. Essa barreira financeira sufoca a inovação e torna a robótica um domínio exclusivo.
As limitações do mapeamento tradicional no espaço de tarefa
Os altos custos poderiam ser justificáveis se os sistemas tradicionais entregassem um desempenho impecável. Em vez disso, eles se baseiam em uma abordagem fundamentalmente falha: o mapeamento no espaço de tarefa. Esse método tenta traduzir diretamente os movimentos da mão humana em posições do efetuador final do robô, o que parece intuitivo, mas, na prática, gera problemas em cascata.
A primeira questão é a latência
A maioria dos sistemas comerciais opera a uma frequência de controle de apenas 5-10Hz, introduzindo um atraso de 100-200ms entre o comando do operador e a resposta do robô. Para entender por que isso importa, faça este experimento: observe os movimentos da sua mão em uma chamada de vídeo com 200ms de atraso. Até tarefas simples viram exercícios de frustração. Agora imagine tentar passar uma linha pelo buraco de uma agulha ou manipular objetos delicados com esse mesmo atraso.
O segundo problema é ainda mais insidioso: as singularidades cinemáticas
Quando um braço robótico se aproxima de certas configurações (como a extensão total), os algoritmos tradicionais de cinemática inversa falham de forma espetacular. O sistema ou congela ou faz movimentos imprevisíveis. Operadores experientes aprendem a evitar essas “zonas de perigo”, mas isso significa que estão constantemente lutando contra o sistema em vez de se concentrar na tarefa em si.
Talvez o mais prejudicial seja o desgaste físico dos operadores
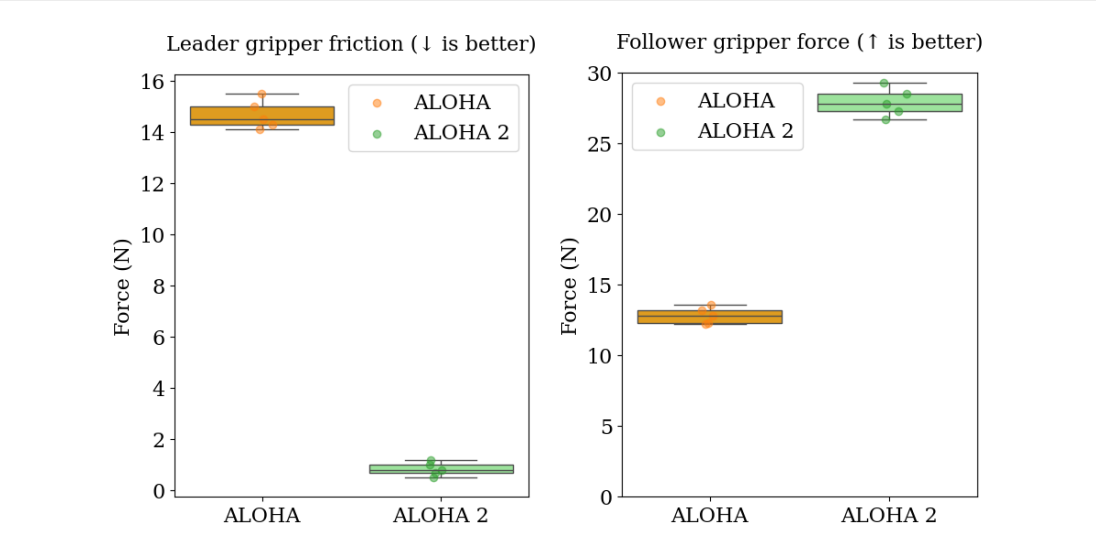
As garras líderes tradicionais exigem força significativa para operar, muitas vezes ultrapassando 14.68 Newtons (N), o que leva à fadiga rápida em sessões prolongadas. Isso equivale a manter uma pinça segurando um peso de 1.5kg. Ao longo de um turno de oito horas, isso provoca fadiga severa do operador e reduz a precisão exatamente quando ela é mais necessária.
Dependência de sistemas proprietários
Para compensar essas limitações, os fabricantes recorrem a soluções proprietárias e de alto custo. Braços robóticos avançados com mecanismos de controle de precisão integrados melhoram bastante o desempenho, mas a um preço enorme. Além disso, esses sistemas costumam estar trancados em ecossistemas de software fechados, restringindo a personalização e limitando a acessibilidade a quem pode arcar com licenças caras.
Rompendo as amarras: a revolução do ALOHA 2 no espaço de juntas
O problema fundamental da teleoperação não é só o custo — é também o controle. Os sistemas tradicionais tentam mapear os movimentos humanos diretamente nos efetuadores finais do robô, uma abordagem que parece intuitiva, mas que entende de forma totalmente equivocada como os humanos controlam naturalmente movimentos complexos. O ALOHA 2 adota uma abordagem radicalmente diferente, apostando no mapeamento no espaço de juntas, e os resultados são transformadores. Se a teleoperação tradicional é um castelo de cartas erguido sobre métodos de controle ultrapassados e aprisionamento ao fornecedor, o ALOHA 2 é a bola de demolição.
Entendendo o mapeamento no espaço de juntas
Pense em como você estende a mão para pegar uma xícara. Você não calcula conscientemente a posição exata da sua mão no espaço 3D — o seu cérebro coordena naturalmente o movimento das juntas do ombro, do cotovelo e do punho. É exatamente assim que o ALOHA 2 funciona. Ele mapeia os ângulos das juntas do robô líder nas juntas do robô seguidor em tempo real. Isso desbloqueia um controle mais suave e previsível, elimina o escalonamento errático do movimento e permite maior precisão com menos esforço do operador.
Essa mudança de abordagem, aparentemente simples, desencadeia melhorias drásticas em todos os aspectos da teleoperação.
Frequência de controle: do atraso à fluidez
A maioria dos sistemas comerciais de teleoperação roda a uma lenta frequência de controle de 5-10Hz, introduzindo um atraso de 100-200ms entre o comando e a execução. O ALOHA 2 opera a nítidos 50Hz. Isso não é só um jogo de números — é a diferença entre lutar contra o sistema e senti-lo como uma extensão natural dos seus movimentos. A 50Hz, o laço de controle roda a cada 20 milissegundos, rápido o suficiente para que os operadores relatem que o robô parece uma extensão direta dos seus braços, em vez de uma ferramenta remota que tentam controlar.
Redução drástica de força e controle líder-seguidor natural
Os sistemas tradicionais exigem uma punitiva força de 14.68N só para operar as garras — imagine tentar manter o controle preciso enquanto aperta constantemente uma mola pesada. O ALOHA 2 reduz isso para apenas 0.84N.
| Característica | ALOHA 2 | Sistemas tradicionais |
|---|---|---|
| Frequência de controle | 50Hz | 5 – 10Hz |
| Latência | < 20ms | 100 – 200ms |
| Força da garra líder | 0.84N | 14.68N |
| Força de fechamento do seguidor | 27.9N | 12.8N |
| Custo | Fração do custo dos sistemas tradicionais | $100k+ |
Os operadores podem trabalhar por mais tempo, com mais precisão e sem sofrer com a fadiga das mãos. O sistema líder-seguidor garante que cada movimento feito pelo operador seja espelhado de forma natural e intuitiva pelo robô seguidor, permitindo uma experiência de teleoperação orgânica com carga cognitiva mínima.
Isso é uma mudança fundamental na usabilidade.
Precisão submilimétrica para tarefas complexas
A teleoperação industrial costuma estar associada a movimentos grosseiros e imprecisos, que exigem correção constante do operador. Talvez o mais notável seja que essa usabilidade aprimorada vem acompanhada de maior precisão. As garras do ALOHA 2 oferecem mais que o dobro da precisão de força dos sistemas tradicionais (27.9N contra 12.8N), permitindo tarefas de manipulação delicadas que antes eram impossíveis sem hardware extremamente caro.
Arquitetura de controle e pilha de software
O sistema de controle central do ALOHA 2 é construído sobre o ROS2 (Robot Operating System 2), garantindo modularidade, desempenho em tempo real e integração perfeita com pipelines de aprendizado robótico. Ao contrário das montagens de teleoperação tradicionais, que exigem programação CAN de baixo nível, o ALOHA 2 simplifica a complexidade do software por meio do Interbotix, uma biblioteca de controle baseada em Python que reduz o tempo de desenvolvimento em centenas de linhas de código.
Componentes-chave da pilha de software do ALOHA 2:
- Middleware ROS2: gerencia a comunicação em tempo real entre os braços líder e seguidor.
- Controle PID e de impedância: garante uma teleoperação suave e adaptativa.
- Ambiente de aprendizado de máquina pré-instalado: vem com Ubuntu, ROS2 e Interbotix para implantação imediata.
- Módulo de compensação de gravidade: reduz o esforço do operador usando mecanismos de retração passiva.
A engenharia que faz tudo funcionar
O desempenho é ótimo — mas você já pensou em repensar como os sistemas robóticos deveriam ser construídos? Enquanto os fabricantes tradicionais otimizam para o controle e o aprisionamento, o ALOHA 2 otimiza para algo mais valioso: a liberdade de inovar.
Filosofia de design modular
Quer experimentar um novo design de garra? Você pode imprimi-la em 3D usando os arquivos CAD fornecidos. Precisa modificar o sistema de controle? O software é de código aberto e bem documentado. Esse é um dos traços mais marcantes do ALOHA 2: sua arquitetura modular. Em vez de ficar preso a um sistema monolítico, em que um componente defeituoso pode tornar a unidade inteira inútil, o ALOHA 2 adota a modularidade em todos os níveis. Das garras aos atuadores, cada subsistema foi projetado para ser facilmente substituído, atualizado ou modificado.
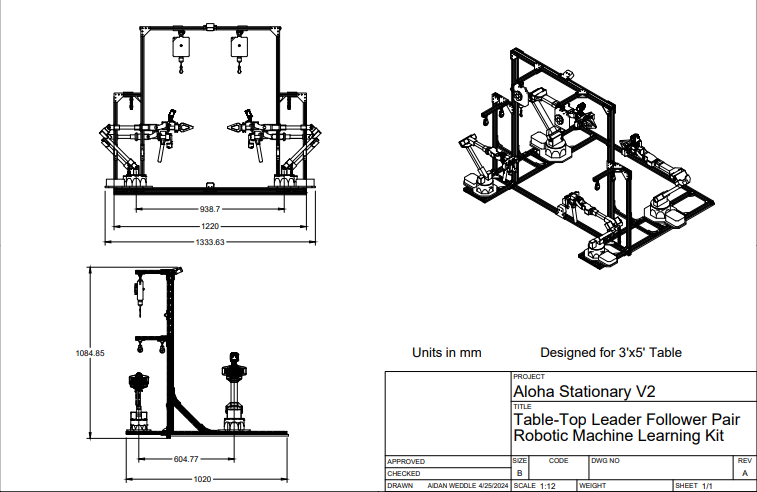
| Componente | Especificação |
|---|---|
| Braços líderes | WidowX 250 S – ALOHA Version |
| Braços seguidores | ViperX 300 S – ALOHA Version |
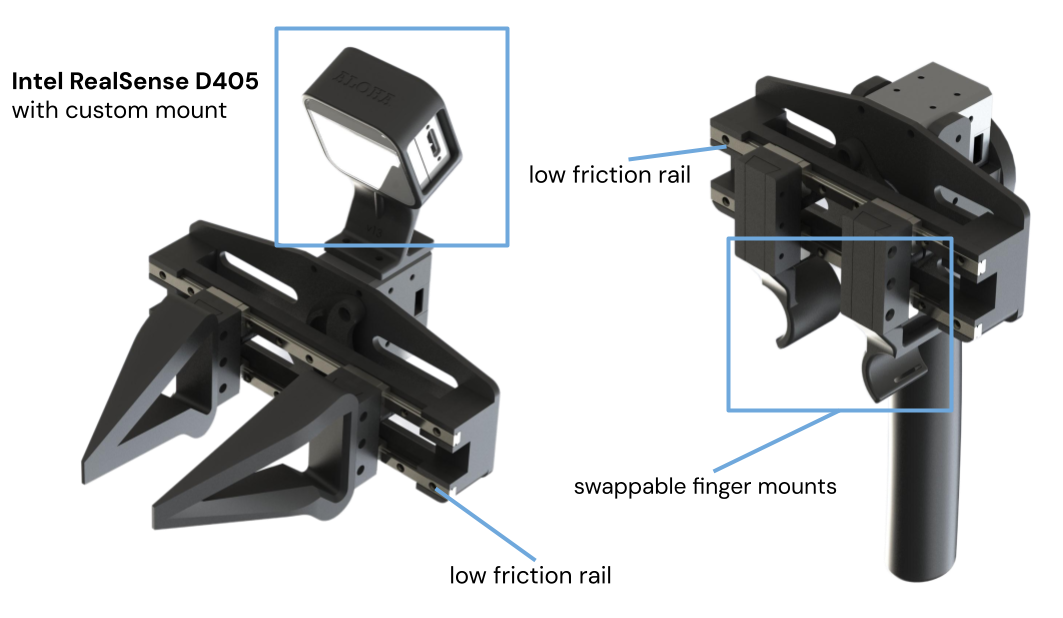
| Câmeras | 4x Intel RealSense D405 |
| Chassi | Modular, perfil de alumínio extrudado |
| Computador | Laptop de alto desempenho (com Ubuntu, ROS2 e Interbotix pré-instalados) |
Uso estratégico de componentes padrão
Os fabricantes de robótica nos venderam a história de que a precisão exige peças proprietárias e sistemas fechados. O ALOHA 2 vira esse modelo de cabeça para baixo ao incorporar estrategicamente componentes de prateleira sempre que possível. Usando motores Dynamixel padrão e componentes prontos, ele atinge precisão submilimétrica mantendo cada peça reparável e substituível. Quando um braço industrial tradicional falha, você enfrenta semanas de parada à espera do serviço de fábrica. Quando um componente do ALOHA 2 precisa de atenção, você pode consertá-lo com peças de qualquer fornecedor decente de hardware.
A vantagem da reparabilidade
Ao contrário dos robôs industriais proprietários, que exigem técnicos especializados até para pequenos reparos, o ALOHA 2 foi construído para ser reparado pelos próprios usuários. Se uma garra quebra, uma junta se desgasta ou um suporte de câmera afrouxa, os usuários não precisam enviá-lo de volta ao fabricante nem esperar por peças de reposição caras. Graças ao seu design aberto e ao uso de materiais amplamente disponíveis, o ALOHA 2 pode ser reparado com peças impressas em 3D, fixadores genéricos e componentes de uma oficina mecânica local. Por exemplo: imagine esperar seis semanas por um técnico da fábrica em vez de consertar uma garra do ALOHA 2 em algumas horas. Essa característica de reparabilidade não diz respeito apenas à economia de custos — diz respeito à longevidade.
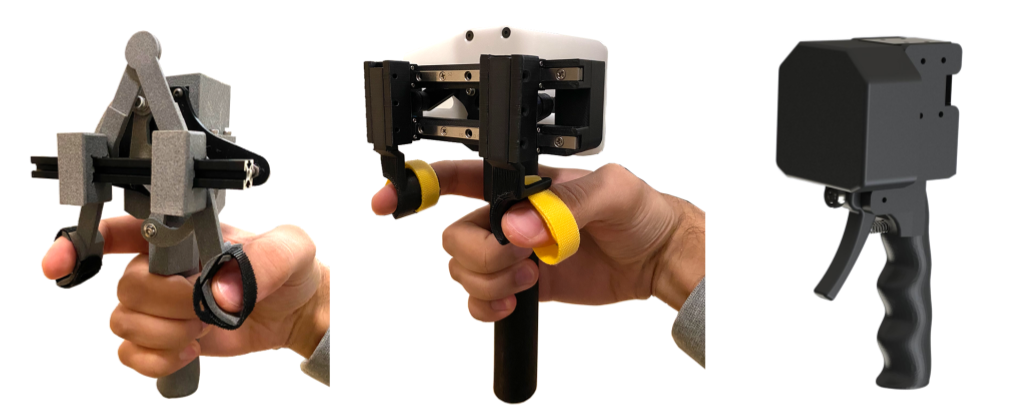
Decisões inteligentes de design (como garras transparentes)
A engenharia do ALOHA 2 está repleta de otimizações pequenas, mas críticas que aprimoram a usabilidade. Um exemplo de destaque são as garras transparentes. Ao contrário das garras opacas tradicionais, o design de dedos transparentes do ALOHA 2 permite aos operadores confirmar visualmente a precisão da pegada durante tarefas delicadas. Esse recurso pequeno, mas significativo, melhora a interação humano-robô e torna as tarefas de manipulação fina muito mais intuitivas. Na robótica tradicional, isso seria descartado como mera estética.
Outras melhorias inteligentes de design incluem:
- Garras baseadas em trilho de baixo atrito que reduzem drasticamente a fadiga do operador.
- Compensação passiva de gravidade que reduz o esforço durante a teleoperação.
- Suportes de dedo intercambiáveis para diferentes adaptações específicas de cada tarefa.
Cada escolha no design do ALOHA 2 tem um propósito — elevar o desempenho e tornar a robótica mais acessível, reparável e modificável.
Aprendizado por demonstração
Os robôs deveriam aprender como os humanos aprendem — não por meio de infinitas linhas de código, mas observando e imitando. Como programar um robô para adaptar a força da pegada a diferentes objetos? Como codificar os ajustes sutis necessários para passar uma linha pelo buraco de uma agulha?
Quer que um robô pegue um objeto? Você define pontos de pegada precisos, trajetórias de movimento e parâmetros de força — manualmente. Quer que ele se adapte a objetos diferentes? É mais uma rodada de ajuste de parâmetros, rotulagem de dados e depuração. Pense em como os humanos aprendem tarefas físicas complexas. Um mestre artesão não ensina o seu aprendiz escrevendo equações matemáticas de força e movimento — ele demonstra. O aprendiz observa, imita e, aos poucos, desenvolve uma compreensão intuitiva da tarefa.
O ALOHA 2 elimina esse gargalo. Em vez de escrever código para cada ação, os usuários podem ensinar o sistema demonstrando fisicamente as tarefas. Essa abordagem reduz drasticamente a necessidade de programação de baixo nível, tornando o aprendizado robótico mais intuitivo e acessível tanto para não programadores quanto para pesquisadores e engenheiros.
A ciência por trás do aprendizado por demonstração
Em sua essência, o sistema de aprendizado do ALOHA 2 segue um princípio poderoso:
- O sistema de teleoperação líder-seguidor registra as demonstrações humanas em tempo real.
- Os dados coletados são processados em políticas de controle a partir das quais o robô consegue generalizar.
- O ALOHA 2 reproduz, refina e aprimora seu desempenho ao longo de tentativas repetidas.
Cada demonstração gera milhares de pontos de dados que mostram não apenas o que os humanos fazem, mas como eles fazem. Quando um operador demonstra como passar uma linha pelo buraco de uma agulha, o sistema registra:
- Posições e velocidades precisas das juntas
- Ajustes de força durante manipulações delicadas
- Retorno visual de múltiplos ângulos de câmera
- Relações temporais entre os movimentos
Esses dados se tornam material de treinamento para algoritmos de aprendizado de máquina capazes de extrair padrões e estratégias da expertise humana. Em essência, em vez de codificar de forma rígida como dobrar uma camiseta, dar um nó ou manipular objetos delicados, o ALOHA 2 observa, aprende e refina suas habilidades de forma dinâmica, o que o torna muito mais versátil do que as abordagens tradicionais baseadas em programação.
Escalando o aprendizado robótico com dados de alta qualidade
A chave para qualquer bom modelo de aprendizado de máquina são os dados, e o ALOHA 2 foi projetado para a coleta de dados em larga escala, em uma escala sem precedentes. Equipado com câmeras Intel RealSense D405 montadas no alto e no punho, o sistema captura entrada visual de múltiplos ângulos junto com dados de movimento de alta frequência, permitindo que ele aprenda com um nível de precisão sem precedentes.
- Registro de movimento a 50Hz — captura dados detalhados de posição e velocidade das juntas
- Dados de visão RGB-D — fornecem percepção com noção de profundidade para tarefas complexas de manipulação
- Coleção diversificada de demonstrações — milhares de demonstrações registradas possibilitam uma melhor generalização entre diferentes tarefas
- Esse enorme conjunto de dados serve de combustível para a robótica orientada por IA, possibilitando um melhor aprendizado por imitação, aprendizado por reforço e otimização de políticas.
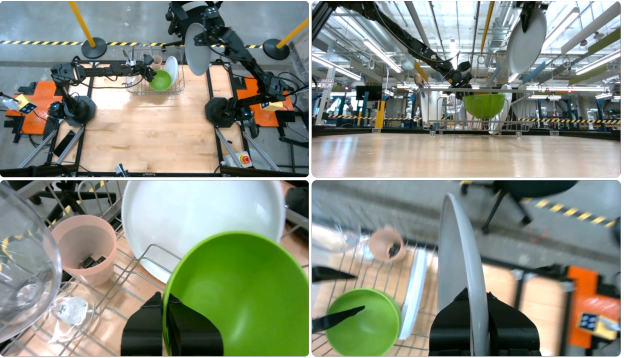
Fonte: Artigo An Enhanced Low-Cost Hardware
for Bimanual Teleoperation
Aprendizado robótico escalável com o MuJoCo
A integração do ALOHA 2 com o MuJoCo (Multi-Joint Dynamics with Contact) é a ponte entre a demonstração humana e o aprendizado robótico escalável. O motor de física oferece um ambiente altamente preciso e de baixo custo para testar e refinar comportamentos robóticos antes da implantação no mundo real.
O MuJoCo permite que os pesquisadores:
- Testem políticas de controle em microssegundos em vez de minutos, acelerando os ciclos de desenvolvimento
- Explorem casos extremos que seriam perigosos demais para o hardware real, reduzindo falhas custosas
- Gerem dados sintéticos de treinamento variando os parâmetros de demonstrações bem-sucedidas, ampliando a diversidade do conjunto de dados
- Validem comportamentos aprendidos em diferentes condições ambientais, melhorando a adaptabilidade no mundo real
O mais importante: a identificação precisa do sistema do ALOHA 2 garante uma transferência perfeita da simulação para o mundo real.
As políticas refinadas no MuJoCo se traduzem diretamente para o robô físico, eliminando a “lacuna entre simulação e realidade” que assola a robótica há décadas. Isso garante que os comportamentos desenvolvidos na simulação permaneçam confiáveis na execução no mundo real — sem o infindável ajuste por tentativa e erro.
Com demonstrações no mundo real, coleta de dados em larga escala e simulação de alta fidelidade, o ALOHA 2 está moldando o futuro do aprendizado robótico adaptativo, escalável e intuitivo para os humanos.
O futuro da robótica é aberto
Durante décadas, a robótica esteve trancada atrás de custos exorbitantes, ecossistemas controlados por fornecedores e arquiteturas rígidas que sufocam a inovação. O ALOHA 2 é a prova de que não precisamos aceitar esse status quo. Não é apenas um sistema robótico mais acessível — é uma visão fundamentalmente diferente de como a robótica deveria ser construída, compartilhada e evoluída.
Os robôs industriais tradicionais são caixas-pretas, projetados para serem exclusivos, caros e inflexíveis. O ALOHA 2 vira esse modelo de cabeça para baixo. Tudo é aberto — dos arquivos CAD aos algoritmos de controle — dando a desenvolvedores, pesquisadores e engenheiros a ****liberdade de experimentar, iterar e construir sobre o trabalho já existente. Acabou a espera por atualizações dos fabricantes. Acabou o aprisionamento ao hardware proprietário. Se você quiser modificar algo, pode. Se você quiser melhorar algo, vai conseguir.
Este é o momento Linux da robótica — o ponto em que uma plataforma de código aberto se torna poderosa o suficiente para rivalizar com sistemas proprietários, mantendo-se ao mesmo tempo acessível o suficiente para democratizar toda uma indústria. O ALOHA 2 entrega precisão submilimétrica, teleoperação sem esforço e aprendizado robótico em larga escala — tudo a uma fração do custo dos sistemas tradicionais. Ele supera seus concorrentes não porque está trancado pelo sigilo corporativo, mas porque está aberto à colaboração das mentes mais brilhantes da robótica. É assim que se parece a inovação de verdade — sem barreiras artificiais, sem barreiras pagas, apenas um ecossistema crescente de construtores impulsionando a robótica. A DeepMind, a Stanford e laboratórios de robótica de todo o mundo já estão provando o que é possível quando o código aberto assume o protagonismo. Agora é a sua vez.
Se você é desenvolvedor, pesquisador ou alguém que acredita em romper barreiras em vez de contorná-las, este é o seu momento. O ALOHA 2 é um convite. Confira o código no GitHub. Explore os modelos do MuJoCo. Adquira o hardware. Experimente com ele. Leve-o mais longe. Faça parte do futuro em que a robótica pertence a todos.
Entre para deixar um comentário.