Будущее робототехники на открытом аппаратном обеспечении
 2884
2884
Мы на пороге революции открытого аппаратного обеспечения, и если вы следите за происходящим, вы это чувствуете. Недавний ажиотаж вокруг DeepSeek и OpenAI — это не только про ИИ-модели, это симптом куда более крупного сдвига. Этос открытых технологий проникает в каждый слой инженерии, и робототехника — следующая.
Ян Лекун, идейный лидер в области открытого ИИ, годами говорит о важности открытых систем, и он прав: проприетарные технологии создают «силосы», а открытые — питают инновации. «Момент Linux» для ПО открыл эпоху экспоненциального развития, и теперь робототехника стоит на том же рубеже. Но есть проблема: пока ПО расцветало в открытых экосистемах, аппаратное обеспечение оставалось закованным в проприетарные экосистемы, раздутые цены и ограниченный доступ.
Почему «железу» нужен свой «момент Linux»
Десятилетиями робототехника застревала в мире, где передовые технологии заперты за закрытыми дверями. Хотели прецизионную робототехнику — приходилось выкладывать целое состояние за промышленные манипуляторы высокого класса. Хотели поэкспериментировать с телеоперацией — приходилось работать в дорогих закрытых системах, душивших кастомизацию и творчество. Это экосистема, которая отбивает охоту к прогрессу у всех, кроме хорошо финансируемых лабораторий и крупных корпораций.
ALOHA 2 ломает эту парадигму. Это не просто очередной исследовательский проект — это смелый шаг к демократизации робототехники. С открытой аппаратной конструкцией, модульными компонентами и способностью не уступать (а порой и превосходить) дорогие проприетарные системы, ALOHA 2 создаёт платформу, где инновации не ограничены платным доступом. Она даёт независимым разработчикам, исследователям и энтузиастам инструменты двигать робототехнику вперёд — как Linux сделал для ПО.

Эта статья для тех, кто понимает — для тех, кто строит, кто хакает, кто рос, разбирая вещи просто чтобы понять, как они работают. Мы подробно разберём проблемы традиционной телеоперации, прорывы ALOHA 2 и то, как открытое «железо» закладывает основу будущего робототехники. Если вы когда-нибудь мечтали собрать собственную прецизионную роботизированную систему — всё начинается здесь.
Барьер стоимости в телеоперации
Десятилетиями индустрия робототехники оставалась за барьером непомерных затрат. Промышленные системы телеоперации часто стоят свыше $100 000 из-за необходимости в высокоточных приводах, проприетарных системах управления и обширных требованиях к калибровке.
Когда производители говорят о телеоперации «промышленного класса», на деле речь о сложной сети взаимозависимых проприетарных систем. Базовый манипулятор с возможностями телеоперации начинается от $50–80 тыс., но это лишь начало. Добавьте обязательные системы силовой обратной связи ($20 тыс.+), ежегодные лицензии на ПО ($10–15 тыс.) и специализированное калибровочное оборудование — и вы уже за $100 тыс. ещё до первой строчки кода. Но скрытые расходы ещё глубже. Большинству систем нужны специальные программы обучения ($5 тыс. на оператора), регулярная перекалибровка заводскими техниками ($2–3 тыс. за визит) и контракты на обслуживание на десятки тысяч в год. Это не просто дорого — это бизнес-модель, спроектированная держать пользователей в зависимости от поставщиков даже ради базовых доработок.
Даже исследовательские установки, часто использующие манипуляторы среднего класса, стоят десятки тысяч долларов — и это ограничивает доступ хорошо финансируемыми институтами и корпорациями. Этот финансовый барьер душит инновации и делает робототехнику закрытой областью.
Ограничения традиционного отображения в пространстве задачи
Высокая стоимость была бы оправдана, если бы традиционные системы работали безупречно. Вместо этого они построены на принципиально ошибочном подходе — отображении в пространстве задачи. Этот метод пытается напрямую переводить движения руки человека в позиции рабочего органа робота, что кажется интуитивным, но на практике порождает каскад проблем.
Первая проблема — задержка
Большинство коммерческих систем работают всего на частоте управления 5–10 Гц, что вносит задержку 100–200 мс между вводом оператора и откликом робота. Чтобы понять, почему это важно, попробуйте: посмотрите на движения своей руки в видеозвонке с задержкой 200 мс. Даже простые задачи превращаются в мучение. Теперь представьте, что вы пытаетесь вдеть нитку в иголку или манипулировать хрупкими объектами с той же задержкой.
Вторая проблема ещё коварнее — кинематические сингулярности
Когда манипулятор приближается к определённым конфигурациям (например, к полному вытягиванию), традиционные алгоритмы обратной кинематики эффектно отказывают. Система либо зависает, либо совершает непредсказуемые движения. Опытные операторы учатся избегать этих «опасных зон», но это значит, что они постоянно борются с системой вместо того, чтобы сосредоточиться на самой задаче.
Пожалуй, наиболее разрушителен физический износ операторов
Традиционные ведущие захваты требуют значительного усилия, часто свыше 14,68 ньютона (Н), что ведёт к быстрой усталости в длительных сессиях. Это эквивалентно удержанию щипкового хвата на грузе 1,5 кг. За восьмичасовую смену это приводит к сильной усталости оператора и снижает точность именно тогда, когда она нужнее всего.
Зависимость от проприетарных систем
Чтобы компенсировать эти ограничения, производители полагаются на проприетарные дорогие решения. Продвинутые манипуляторы со встроенными механизмами прецизионного управления значительно повышают характеристики, но за огромную цену. Кроме того, такие системы часто заперты в закрытых программных экосистемах, ограничивая кастомизацию и доступность теми, кто может позволить себе дорогие лицензии.
Вырваться на свободу: революция ALOHA 2 в пространстве суставов
Фундаментальная проблема телеоперации не только в стоимости — она ещё и в управлении. Традиционные системы пытаются отображать движения человека напрямую на рабочие органы робота — подход, который кажется интуитивным, но в корне не понимает, как человек естественным образом управляет сложными движениями. ALOHA 2 идёт радикально иным путём, делая ставку на отображение в пространстве суставов, и результаты преобразующие. Если традиционная телеоперация — карточный домик на устаревших методах управления и привязке к поставщику, то ALOHA 2 — это таран.
Что такое отображение в пространстве суставов
Подумайте, как вы тянетесь за чашкой. Вы не вычисляете осознанно точное положение руки в 3D-пространстве — мозг естественно координирует движение плечевого, локтевого и запястного суставов. Именно так работает ALOHA 2. Она в реальном времени отображает углы суставов ведущего робота на суставы ведомого. Это даёт более плавное и предсказуемое управление, устраняет хаотичное масштабирование движения и обеспечивает более высокую точность при меньших усилиях оператора.
Этот, казалось бы, простой сдвиг в подходе каскадно приводит к значительным улучшениям во всех аспектах телеоперации.
Частота управления: от лага к плавности
Большинство коммерческих систем телеоперации работают на вялой частоте 5–10 Гц, внося задержку 100–200 мс между вводом и исполнением. ALOHA 2 работает на чётких 50 Гц. Это не просто игра цифр — это разница между борьбой с системой и ощущением естественного продолжения собственных движений. На 50 Гц цикл управления выполняется каждые 20 миллисекунд — достаточно быстро, чтобы операторы сообщали: робот ощущается как прямое продолжение рук, а не как удалённый инструмент, которым пытаешься управлять.
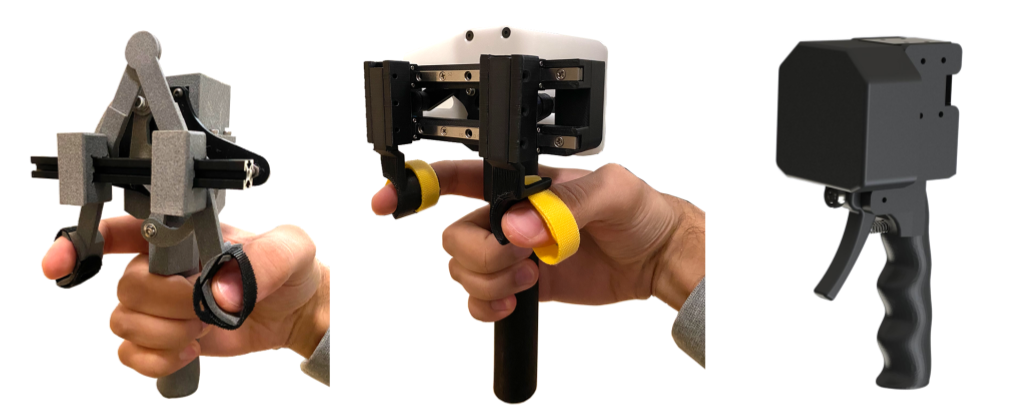
Резкое снижение усилия и естественное управление «ведущий-ведомый»
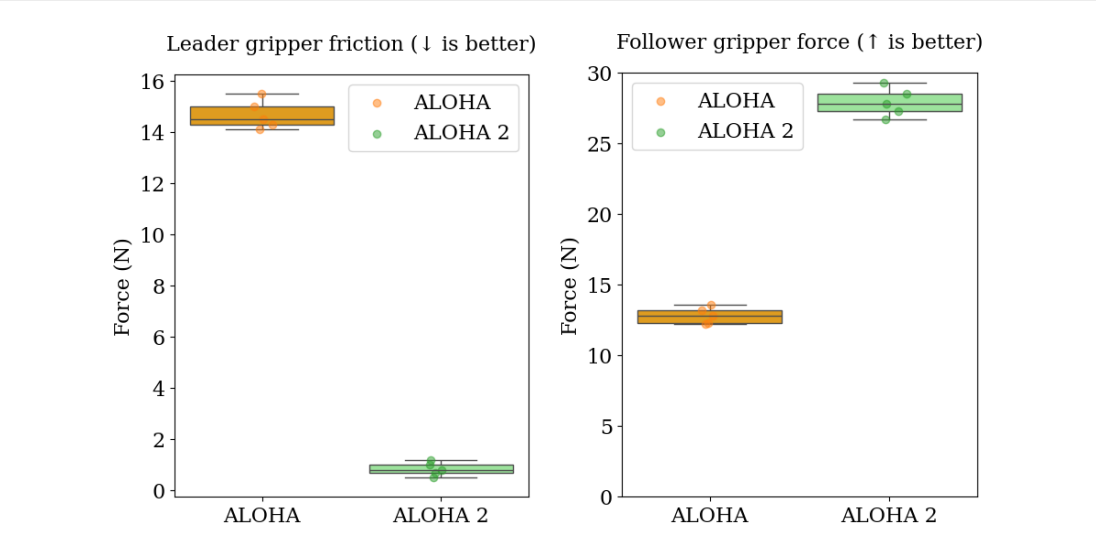
Традиционные системы требуют изматывающих 14,68 Н усилия лишь для работы захватов — представьте, что вы пытаетесь сохранять точное управление, постоянно сжимая тугую пружину. ALOHA 2 снижает это до всего 0,84 Н.
| Характеристика | ALOHA 2 | Традиционные системы |
|---|---|---|
| Частота управления | 50Hz | 5 – 10Hz |
| Задержка | < 20ms | 100 – 200ms |
| Усилие ведущего захвата | 0.84N | 14.68N |
| Усилие смыкания ведомого | 27.9N | 12.8N |
| Стоимость | Доля от стоимости традиционных систем | $100k+ |
Операторы могут работать дольше и точнее, не страдая от усталости рук. Система «ведущий-ведомый» обеспечивает, что каждое движение оператора естественно и интуитивно повторяется ведомым роботом, давая органичный опыт телеоперации при минимальной когнитивной нагрузке.
Это фундаментальный сдвиг в удобстве использования.
Субмиллиметровая точность для сложных задач
Промышленная телеоперация часто ассоциируется с грубыми, неточными движениями, требующими постоянной коррекции оператора. Что особенно примечательно, это улучшенное удобство сопровождается повышенной точностью. Захваты ALOHA 2 обеспечивают более чем вдвое большую точность по усилию по сравнению с традиционными системами (27,9 Н против 12,8 Н), позволяя выполнять деликатные манипуляции, ранее невозможные без крайне дорогого оборудования.
Архитектура управления и программный стек
Ядро системы управления ALOHA 2 построено на ROS2 (Robot Operating System 2), обеспечивая модульность, работу в реальном времени и бесшовную интеграцию с конвейерами обучения роботов. В отличие от традиционных установок телеоперации, требующих низкоуровневого программирования CAN, ALOHA 2 упрощает сложность ПО через Interbotix — управляющую библиотеку на Python, сокращающую время разработки на сотни строк кода.
Ключевые компоненты программного стека ALOHA 2:
- Промежуточное ПО ROS2: обеспечивает связь в реальном времени между ведущей и ведомой руками.
- ПИД- и импедансное управление: обеспечивает плавную и адаптивную телеоперацию.
- Предустановленная среда машинного обучения: поставляется с Ubuntu, ROS2 и Interbotix для развёртывания «из коробки».
- Модуль компенсации гравитации: снижает нагрузку оператора за счёт пассивных возвратных механизмов.
Инженерия, которая всё это обеспечивает
Характеристики — это здорово, но задумывались ли вы о том, чтобы переосмыслить, как вообще должны строиться роботизированные системы? Там, где традиционные производители оптимизируют под контроль и привязку, ALOHA 2 оптимизирует под нечто более ценное — свободу для инноваций.
Философия модульной конструкции
Хотите поэкспериментировать с новой конструкцией захвата? Вы можете напечатать её на 3D-принтере по предоставленным CAD-файлам. Нужно изменить систему управления? ПО открыто и хорошо задокументировано. Это одна из определяющих черт ALOHA 2 — её модульная архитектура. Вместо привязки к монолитной системе, где один неисправный компонент может вывести из строя весь блок, ALOHA 2 использует модульность на каждом уровне. От захватов до приводов — каждая подсистема рассчитана на лёгкую замену, апгрейд или доработку.
| Компонент | Спецификация |
|---|---|
| Ведущие руки | WidowX 250 S – ALOHA Version |
| Ведомые руки | ViperX 300 S – ALOHA Version |
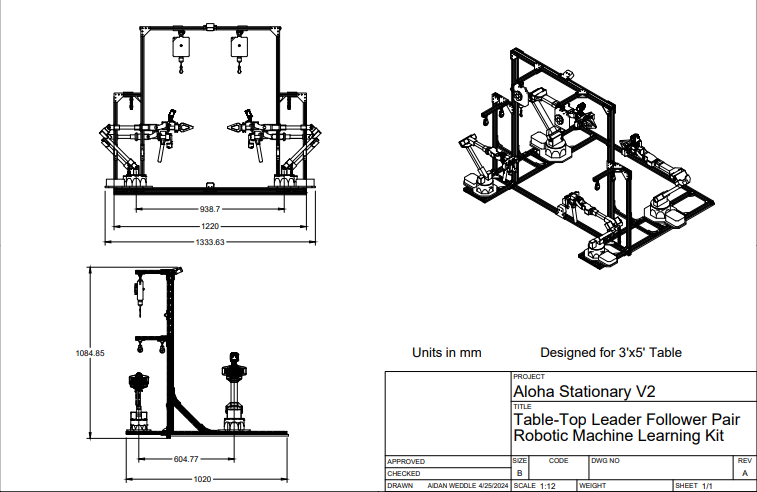
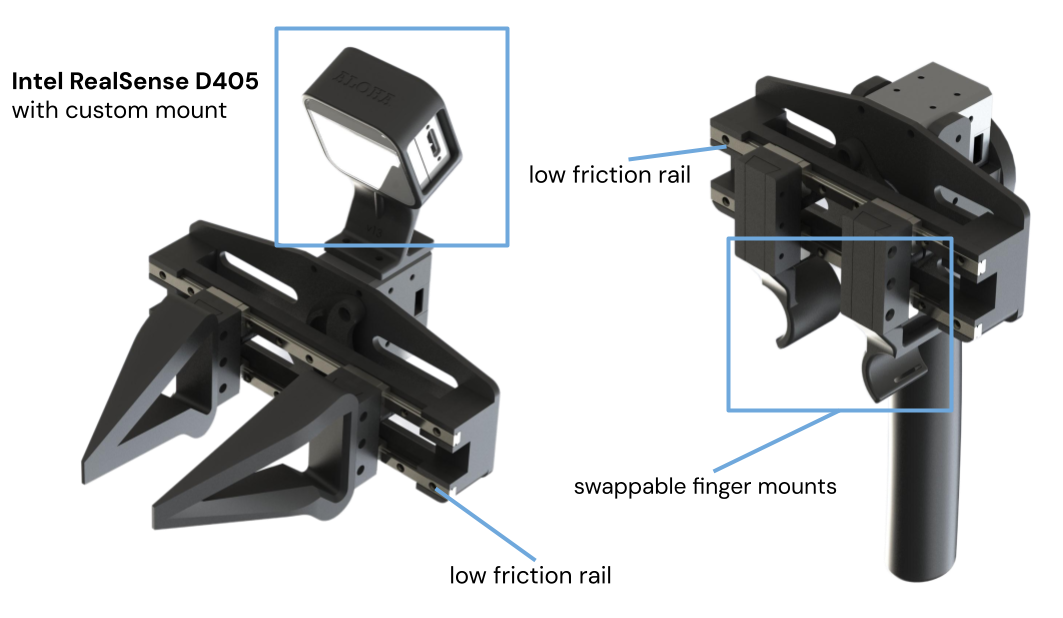
| Камеры | 4x Intel RealSense D405 |
| Шасси | Модульное, алюминиевый профиль |
| Компьютер | Производительный ноутбук (с предустановленными Ubuntu, ROS2, Interbotix) |
Стратегическое использование стандартных компонентов
Производители робототехники продали нам историю, будто точность требует проприетарных деталей и закрытых систем. ALOHA 2 переворачивает эту модель, стратегически используя серийные компоненты везде, где возможно. Применяя стандартные двигатели Dynamixel и готовые компоненты, она достигает субмиллиметровой точности, сохраняя каждую деталь обслуживаемой и заменяемой. Когда отказывает традиционный промышленный манипулятор, вас ждут недели простоя в ожидании заводского сервиса. Когда же требует внимания компонент ALOHA 2, вы чините его деталями от любого приличного поставщика.
Преимущество ремонтопригодности
В отличие от проприетарных промышленных роботов, которым нужны специалисты даже для мелкого ремонта, ALOHA 2 создана для ремонта самими пользователями. Если захват сломался, сустав износился или крепление камеры ослабло, не нужно отправлять её производителю или ждать дорогих запчастей. Благодаря открытой конструкции и широко доступным материалам ALOHA 2 можно отремонтировать напечатанными на 3D-принтере деталями, обычным крепежом и компонентами из местной мастерской. Например: представьте ожидание заводского техника шесть недель против починки захвата ALOHA 2 за несколько часов. Эта ремонтопригодность не только про экономию — она про долговечность.
Умные конструктивные решения (например, прозрачные захваты)
Инженерия ALOHA 2 полна небольших, но критичных оптимизаций, повышающих удобство. Один из ярких примеров — прозрачные захваты. В отличие от традиционных непрозрачных, прозрачные «пальцы» ALOHA 2 позволяют операторам визуально подтверждать точность захвата при деликатных задачах. Эта небольшая, но значимая деталь улучшает взаимодействие человека и робота и делает тонкие манипуляции куда интуитивнее. В традиционной робототехнике это сочли бы просто эстетикой.
Другие умные улучшения конструкции:
- Рельсовые захваты с низким трением, резко снижающие усталость оператора.
- Пассивная компенсация гравитации, снижающая нагрузку при телеоперации.
- Сменные крепления «пальцев» для адаптации под разные задачи.
Каждое решение в конструкции ALOHA 2 служит цели — повышать характеристики и делать робототехнику более доступной, ремонтопригодной и пригодной для доработки.
Обучение по демонстрации
Роботы должны учиться так, как люди — не через бесконечные строки кода, а наблюдая и подражая. Как запрограммировать робота подстраивать силу захвата под разные объекты? Как закодировать тонкие коррекции, нужные, чтобы вдеть нитку в иголку?
Хотите, чтобы робот поднял объект? Вы вручную задаёте точные точки захвата, траектории движения и параметры усилия. Хотите, чтобы он адаптировался к разным объектам? Это ещё один круг настройки параметров, разметки данных и отладки. Подумайте, как люди осваивают сложные физические задачи. Мастер не учит подмастерье, записывая математические уравнения силы и движения, — он показывает. Подмастерье смотрит, повторяет и постепенно вырабатывает интуитивное понимание задачи.
ALOHA 2 устраняет это «узкое место». Вместо написания кода для каждого действия пользователи могут обучать систему, физически демонстрируя задачи. Этот подход резко снижает потребность в низкоуровневом программировании, делая обучение роботов интуитивнее и доступнее как для не-программистов, так и для исследователей и инженеров.
Наука обучения по демонстрации
В своей основе система обучения ALOHA 2 следует мощному принципу:
- Система телеоперации «ведущий-ведомый» записывает демонстрации человека в реальном времени.
- Собранные данные обрабатываются в управляющие политики, которые робот может обобщать.
- ALOHA 2 воспроизводит, уточняет и улучшает свою работу с повторными попытками.
Каждая демонстрация генерирует тысячи точек данных, показывающих не только что делает человек, но и как он это делает. Когда оператор демонстрирует вдевание нитки в иголку, система записывает:
- Точные положения и скорости суставов
- Коррекции усилия при деликатных манипуляциях
- Визуальную обратную связь с нескольких ракурсов камер
- Временны́е связи между движениями
Эти данные становятся учебным материалом для алгоритмов машинного обучения, способных извлекать паттерны и стратегии из человеческого опыта. По сути, вместо жёсткого кодирования того, как сложить футболку, завязать узел или манипулировать хрупкими объектами, ALOHA 2 наблюдает, учится и динамически совершенствует навыки, что делает её куда более универсальной, чем традиционные подходы на основе программирования.
Масштабирование обучения роботов на качественных данных
Ключ к любой хорошей модели машинного обучения — данные, и ALOHA 2 рассчитана на сбор данных в беспрецедентном масштабе. Оснащённая верхними и наручными камерами Intel RealSense D405, система захватывает многоракурсный визуальный ввод вместе с высокочастотными данными движения, позволяя обучаться с беспрецедентным уровнем точности.
- Логирование движения на 50 Гц — фиксирует детальные данные о положении и скорости суставов
- Данные RGB-D — обеспечивают восприятие с учётом глубины для сложных манипуляций
- Разнообразный сбор демонстраций — тысячи записанных демонстраций обеспечивают лучшее обобщение на разные задачи
- Этот огромный массив данных служит топливом для ИИ-робототехники, обеспечивая более качественное обучение с имитацией, обучение с подкреплением и оптимизацию политик.
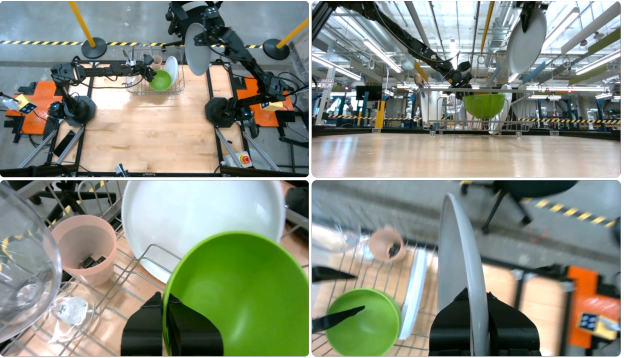
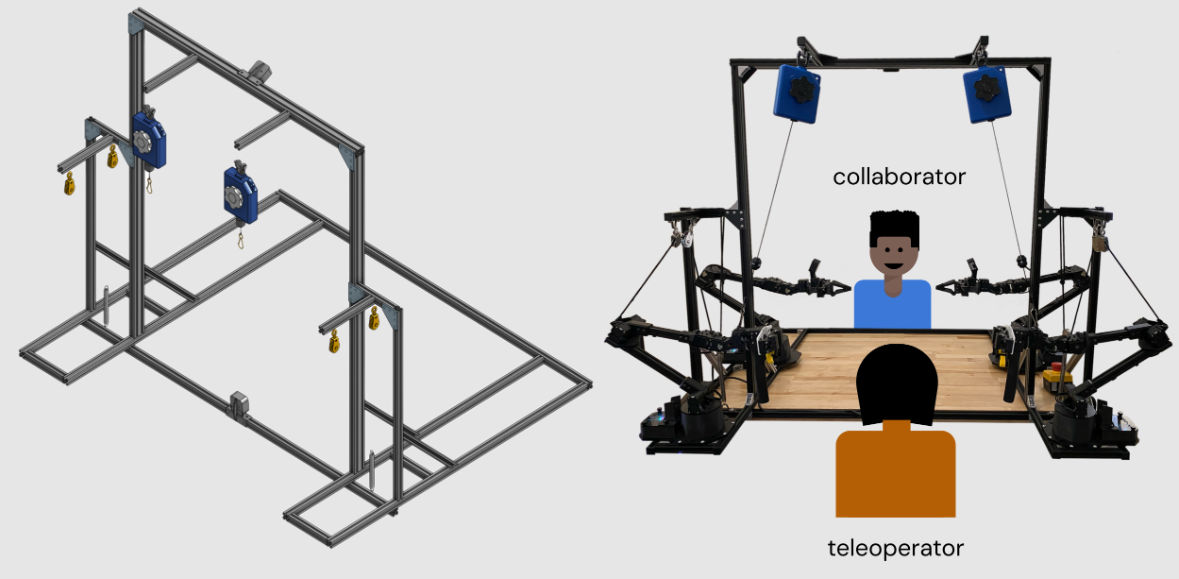
Источник: Статья An Enhanced Low-Cost Hardware
for Bimanual Teleoperation
Масштабируемое обучение роботов с MuJoCo
Интеграция ALOHA 2 с MuJoCo (Multi-Joint Dynamics with Contact) — мост между демонстрацией человека и масштабируемым обучением роботов. Физический движок даёт высокоточную и недорогую среду для тестирования и доводки поведения роботов перед развёртыванием в реальном мире.
MuJoCo позволяет исследователям:
- Тестировать управляющие политики за микросекунды вместо минут, ускоряя циклы разработки
- Исследовать предельные случаи, слишком опасные для реального «железа», снижая дорогостоящие отказы
- Генерировать синтетические обучающие данные, варьируя параметры успешных демонстраций, расширяя разнообразие датасета
- Проверять выученное поведение в разных условиях среды, повышая адаптивность в реальном мире
Что важнее всего, точная идентификация системы ALOHA 2 обеспечивает бесшовный перенос из симуляции в реальность.
Политики, доведённые в MuJoCo, переносятся напрямую на физического робота, устраняя «разрыв симуляция-реальность», десятилетиями досаждавший робототехнике. Это гарантирует, что поведение, разработанное в симуляции, остаётся надёжным при исполнении в реальном мире — без бесконечной настройки методом проб и ошибок.
Сочетая реальные демонстрации, масштабный сбор данных и высокоточную симуляцию, ALOHA 2 формирует будущее адаптивного, масштабируемого и понятного человеку обучения роботов.
Будущее робототехники — открытое
Десятилетиями робототехника была заперта за непомерными ценами, контролируемыми поставщиками экосистемами и жёсткими архитектурами, душащими инновации. ALOHA 2 — доказательство того, что нам не обязательно мириться с этим положением дел. Это не просто более доступная роботизированная система — это принципиально иное видение того, как робототехнику следует строить, распространять и развивать.
Традиционные промышленные роботы — это «чёрные ящики», спроектированные быть закрытыми, дорогими и негибкими. ALOHA 2 переворачивает эту модель с ног на голову. Всё открыто — от CAD-файлов до алгоритмов управления — давая разработчикам, исследователям и инженерам свободу экспериментировать, итерировать и строить поверх уже сделанного. Больше не нужно ждать обновлений от производителей. Больше никакой привязки к проприетарному «железу». Хотите что-то изменить — можете. Хотите что-то улучшить — улучшите.
Это «момент Linux» для робототехники — точка, где открытая платформа становится достаточно мощной, чтобы соперничать с проприетарными системами, оставаясь достаточно доступной, чтобы демократизировать целую индустрию. ALOHA 2 обеспечивает субмиллиметровую точность, лёгкую телеоперацию и масштабное обучение роботов — и всё это за долю стоимости традиционных систем. Она превосходит конкурентов не потому, что заперта в корпоративной тайне, а потому что открыта для сотрудничества с самыми светлыми умами робототехники. Вот как выглядит настоящая инновация — без искусственных барьеров и платного доступа, лишь растущая экосистема создателей, двигающих робототехнику вперёд. DeepMind, Стэнфорд и лаборатории робототехники по всему миру уже доказывают, что возможно, когда открытый код выходит на первый план. Теперь ваша очередь.
Если вы разработчик, исследователь или тот, кто верит в слом барьеров, а не в их обход, — это ваш момент. ALOHA 2 — это приглашение. Посмотрите код на GitHub. Изучите модели MuJoCo. Соберите оборудование. Экспериментируйте с ним. Двигайте его дальше. Станьте частью будущего, где робототехника принадлежит всем.
Войдите, чтобы оставить комментарий.