Construire l’avenir de la robotique avec du matériel open source
 2881
2881
Nous sommes à l’aube d’une révolution du matériel open source, et si vous y prêtez attention, vous pouvez le sentir. L’engouement récent autour de DeepSeek et OpenAI ne concerne pas seulement les modèles d’IA : c’est le symptôme d’un changement bien plus profond. L’éthos des technologies ouvertes s’infiltre dans chaque couche de l’ingénierie, et la robotique est la prochaine.
Yann LeCun, figure de proue de l’IA open source, prêche depuis des années l’importance des systèmes open source, et il a raison : les technologies propriétaires créent des silos, tandis que l’open source nourrit l’innovation. Le « moment Linux » du logiciel a ouvert une ère de développement exponentiel, et la robotique se tient désormais au bord du même précipice. Mais il y a un problème : alors que le logiciel a prospéré dans des écosystèmes ouverts, le matériel est resté enchaîné à des écosystèmes propriétaires, à des coûts gonflés et à un accès restreint.
Pourquoi le matériel a besoin de son « moment Linux »
Pendant des décennies, la robotique est restée prisonnière d’un monde où la technologie de pointe était verrouillée derrière des portes closes. Si vous vouliez de la robotique de précision, il fallait dépenser une fortune pour des bras industriels haut de gamme. Si vous vouliez expérimenter la téléopération, vous étiez contraint de travailler dans des systèmes en boucle fermée coûteux qui étouffaient la personnalisation et le bricolage. C’est un écosystème qui décourage le progrès pour quiconque se trouve en dehors des laboratoires de recherche bien financés ou des grandes entreprises.
ALOHA 2 bouscule ce paradigme. Ce n’est pas qu’un projet de recherche de plus : c’est un pas audacieux vers la démocratisation de la robotique. Avec une conception matérielle ouverte, des composants modulaires et la capacité d’égaler (voire de surpasser) des systèmes propriétaires coûteux, ALOHA 2 crée une plateforme où l’innovation n’est pas limitée par des barrières payantes. Elle donne aux développeurs, chercheurs et bricoleurs indépendants les outils pour faire progresser la robotique, comme Linux l’a fait pour le logiciel.

Cet article s’adresse à ceux qui comprennent : les bâtisseurs, les hackers, ceux qui ont grandi en démontant les choses juste pour voir comment elles fonctionnaient. Nous plongerons en profondeur dans les problèmes de la téléopération traditionnelle, dans les avancées qu’apporte ALOHA 2 et dans la manière dont le matériel ouvert pose les fondations de l’avenir de la robotique. Si vous avez déjà rêvé de bricoler votre propre système robotique de précision, c’est ici que tout commence.
La barrière du coût en téléopération
Pendant des décennies, l’industrie de la robotique est restée verrouillée derrière des coûts prohibitifs. Les systèmes de téléopération de qualité industrielle affichent souvent des prix supérieurs à 100 000 $, en raison du besoin d’actionneurs de haute précision, de systèmes de contrôle propriétaires et d’exigences de calibration considérables.
Quand les fabricants parlent de téléopération de « qualité industrielle », ils parlent en réalité d’un réseau complexe de systèmes propriétaires interdépendants. Un bras robotique de base doté de capacités de téléopération démarre à 50 000–80 000 $, mais ce n’est que le début. Ajoutez les systèmes de retour d’effort obligatoires (20 000 $ et plus), les licences logicielles annuelles (10 000–15 000 $) et l’équipement de calibration spécialisé, et vous dépassez largement les 100 000 $ avant même d’écrire une seule ligne de code. Mais les coûts cachés vont encore plus loin. La plupart des systèmes exigent des programmes de formation spécialisés (5 000 $ par opérateur), une recalibration régulière par des techniciens de l’usine (2 000–3 000 $ par visite) et des contrats de maintenance pouvant atteindre des dizaines de milliers de dollars par an. Ce n’est pas seulement coûteux : c’est un modèle économique conçu pour maintenir les utilisateurs dépendants des fournisseurs, même pour les modifications les plus élémentaires.
Même pour les installations de recherche qui utilisent souvent des bras robotiques de milieu de gamme, cela coûte des dizaines de milliers de dollars, ce qui réserve l’accès aux institutions et aux entreprises bien financées. Cette barrière financière étouffe l’innovation et fait de la robotique un domaine réservé.
Les limites de la cartographie traditionnelle dans l’espace des tâches
Ces coûts élevés seraient peut-être justifiables si les systèmes traditionnels offraient des performances irréprochables. Au lieu de cela, ils reposent sur une approche fondamentalement défaillante : la cartographie dans l’espace des tâches. Cette méthode tente de traduire directement les mouvements de la main humaine en positions de l’effecteur du robot, ce qui semble intuitif mais engendre en pratique une cascade de problèmes.
Le premier problème est la latence
La plupart des systèmes commerciaux fonctionnent à une fréquence de contrôle de seulement 5–10 Hz, introduisant un délai de 100–200 ms entre l’action de l’opérateur et la réponse du robot. Pour comprendre pourquoi cela compte, faites cette expérience : observez les mouvements de votre main lors d’un appel vidéo avec un délai de 200 ms. Même les tâches simples deviennent des exercices de frustration. Imaginez maintenant essayer d’enfiler une aiguille ou de manipuler des objets délicats avec ce même délai.
Le deuxième problème est encore plus insidieux : les singularités cinématiques
Lorsqu’un bras robotique approche certaines configurations (comme l’extension complète), les algorithmes traditionnels de cinématique inverse défaillent de façon spectaculaire. Le système se fige ou effectue des mouvements imprévisibles. Les opérateurs expérimentés apprennent à éviter ces « zones de danger », mais cela signifie qu’ils luttent constamment contre le système au lieu de se concentrer sur la tâche elle-même.
Le plus dommageable est peut-être l’usure physique des opérateurs
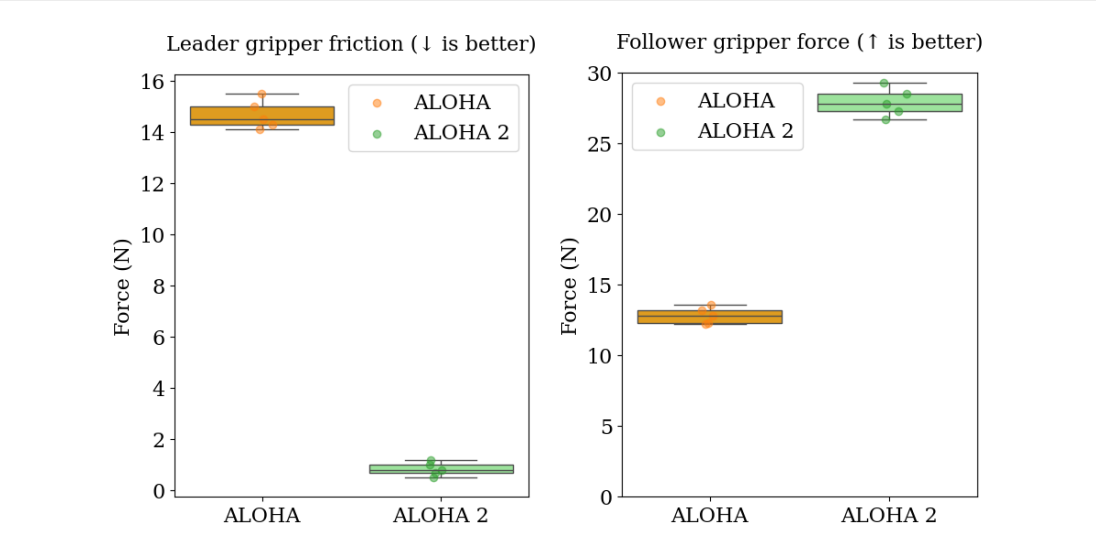
Les pinces maîtresses traditionnelles exigent une force importante pour être actionnées, dépassant souvent 14,68 newtons (N), ce qui entraîne une fatigue rapide lors de sessions prolongées. Cela équivaut à maintenir une prise par pincement sur une charge de 1,5 kg. Au cours d’un poste de huit heures, cela provoque une forte fatigue de l’opérateur et réduit la précision précisément lorsqu’elle est la plus nécessaire.
La dépendance aux systèmes propriétaires
Pour compenser ces limites, les fabricants s’appuient sur des solutions propriétaires et coûteuses. Les bras robotiques avancés dotés de mécanismes intégrés de contrôle de précision améliorent nettement les performances, mais à un prix énorme. De plus, ces systèmes sont souvent verrouillés derrière des écosystèmes logiciels fermés, restreignant la personnalisation et limitant l’accessibilité à ceux qui peuvent se permettre des licences onéreuses.
Se libérer : la révolution d’ALOHA 2 dans l’espace articulaire
Le problème fondamental de la téléopération ne tient pas qu’au coût : il tient aussi au contrôle. Les systèmes traditionnels tentent de mapper les mouvements humains directement sur les effecteurs du robot, une approche qui semble intuitive mais qui méconnaît fondamentalement la manière dont les humains contrôlent naturellement les mouvements complexes. ALOHA 2 adopte une approche radicalement différente en misant sur la cartographie dans l’espace articulaire, et les résultats sont transformateurs. Si la téléopération traditionnelle est un château de cartes bâti sur des méthodes de contrôle dépassées et un verrouillage fournisseur, ALOHA 2 en est le boulet de démolition.
Comprendre la cartographie dans l’espace articulaire
Pensez à la façon dont vous attrapez une tasse. Vous ne calculez pas consciemment la position exacte de votre main dans l’espace 3D : votre cerveau coordonne naturellement le mouvement de vos articulations de l’épaule, du coude et du poignet. C’est exactement ainsi qu’ALOHA 2 fonctionne. Elle mappe en temps réel les angles articulaires du robot maître sur les articulations du robot esclave. Cela permet un contrôle plus fluide et plus prévisible, élimine la mise à l’échelle erratique du mouvement et offre une plus grande précision avec moins d’effort de la part de l’opérateur.
Ce changement d’approche, en apparence simple, se répercute en cascade par des améliorations spectaculaires dans tous les aspects de la téléopération.
Fréquence de contrôle : du décalage à la fluidité
La plupart des systèmes commerciaux de téléopération fonctionnent à une fréquence de contrôle poussive de 5–10 Hz, introduisant un délai de 100–200 ms entre la commande et l’exécution. ALOHA 2 fonctionne à un net 50 Hz. Ce n’est pas qu’une affaire de chiffres : c’est la différence entre lutter contre le système et avoir l’impression d’un prolongement naturel de ses mouvements. À 50 Hz, la boucle de contrôle s’exécute toutes les 20 millisecondes, assez vite pour que les opérateurs déclarent que le robot ressemble à un prolongement direct de leurs bras plutôt qu’à un outil distant qu’ils tentent de piloter.
Réduction drastique de la force et contrôle maître-esclave naturel
Les systèmes traditionnels exigent une force épuisante de 14,68 N rien que pour actionner les pinces : imaginez essayer de garder un contrôle précis tout en comprimant constamment un ressort puissant. ALOHA 2 réduit cela à seulement 0,84 N.
| Caractéristique | ALOHA 2 | Systèmes traditionnels |
|---|---|---|
| Fréquence de contrôle | 50Hz | 5 – 10Hz |
| Latence | < 20ms | 100 – 200ms |
| Force de la pince maîtresse | 0.84N | 14.68N |
| Force de fermeture de l’esclave | 27.9N | 12.8N |
| Coût | Une fraction du coût des systèmes traditionnels | $100k+ |
Les opérateurs peuvent travailler plus longtemps et avec plus de précision, sans souffrir de fatigue des mains. Le système maître-esclave garantit que chaque mouvement de l’opérateur est naturellement et intuitivement reproduit par le robot esclave, offrant une expérience de téléopération organique avec une charge cognitive minimale.
C’est un changement fondamental en matière d’utilisabilité.
Une précision submillimétrique pour les tâches complexes
La téléopération industrielle est souvent associée à des mouvements grossiers et imprécis, exigeant une correction constante de l’opérateur. Et, fait peut-être le plus remarquable, cette utilisabilité améliorée s’accompagne d’une précision accrue. Les pinces d’ALOHA 2 offrent une précision de force plus de deux fois supérieure à celle des systèmes traditionnels (27,9 N contre 12,8 N), permettant des tâches de manipulation délicates auparavant impossibles sans un matériel extrêmement coûteux.
Architecture de contrôle et pile logicielle
Le système de contrôle au cœur d’ALOHA 2 repose sur ROS2 (Robot Operating System 2), garantissant la modularité, des performances en temps réel et une intégration transparente avec les pipelines d’apprentissage robotique. Contrairement aux installations de téléopération traditionnelles qui exigent une programmation CAN de bas niveau, ALOHA 2 simplifie la complexité logicielle grâce à Interbotix, une bibliothèque de contrôle en Python qui réduit le temps de développement de centaines de lignes de code.
Composants clés de la pile logicielle d’ALOHA 2 :
- Intergiciel ROS2 : gère la communication en temps réel entre les bras maître et esclave.
- Contrôle PID et par impédance : assure une téléopération fluide et adaptative.
- Environnement d’apprentissage automatique préinstallé : livré avec Ubuntu, ROS2 et Interbotix pour un déploiement immédiat.
- Module de compensation de gravité : réduit la tension sur l’opérateur grâce à des mécanismes de rétraction passifs.
L’ingénierie qui rend tout cela possible
Les performances, c’est formidable, mais avez-vous déjà songé à repenser la manière dont les systèmes robotiques devraient être construits ? Là où les fabricants traditionnels optimisent pour le contrôle et le verrouillage, ALOHA 2 optimise pour quelque chose de plus précieux : la liberté d’innover.
Une philosophie de conception modulaire
Vous voulez expérimenter une nouvelle conception de pince ? Vous pouvez l’imprimer en 3D à partir des fichiers CAO fournis. Vous devez modifier le système de contrôle ? Le logiciel est open source et bien documenté. C’est l’un des traits les plus caractéristiques d’ALOHA 2 : son architecture modulaire. Au lieu d’être enfermée dans un système monolithique où un seul composant défaillant peut rendre toute l’unité inutilisable, ALOHA 2 adopte la modularité à tous les niveaux. Des pinces aux actionneurs, chaque sous-système est conçu pour être facilement remplacé, mis à niveau ou modifié.
| Composant | Spécification |
|---|---|
| Bras maîtres | WidowX 250 S – ALOHA Version |
| Bras esclaves | ViperX 300 S – ALOHA Version |
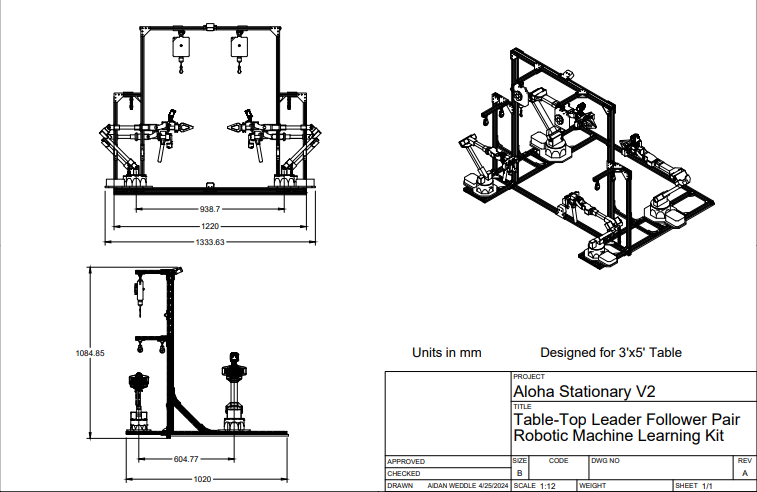
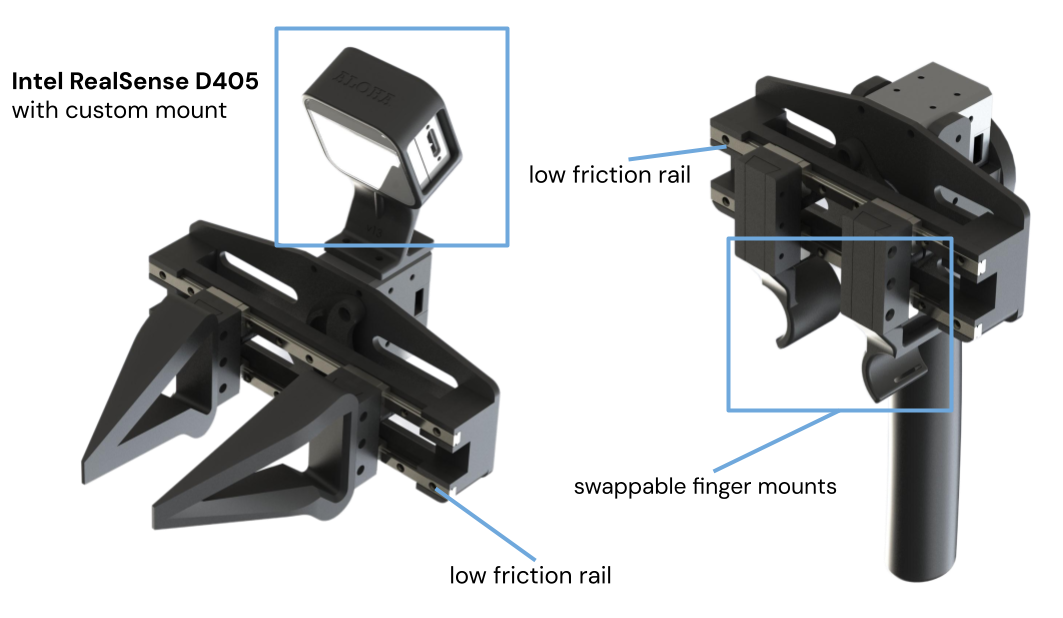
| Caméras | 4x Intel RealSense D405 |
| Châssis | Modulaire, profilé en aluminium |
| Ordinateur | Ordinateur portable haute performance (préinstallé avec Ubuntu, ROS2, Interbotix) |
Une utilisation stratégique de composants standard
Les fabricants de robotique nous ont vendu l’idée que la précision exige des pièces propriétaires et des systèmes fermés. ALOHA 2 renverse ce modèle en intégrant stratégiquement des composants standards partout où c’est possible. En utilisant des moteurs Dynamixel standards et des composants du commerce, elle atteint une précision submillimétrique tout en gardant chaque pièce réparable et remplaçable. Quand un bras industriel traditionnel tombe en panne, ce sont des semaines d’immobilisation à attendre le service de l’usine. Quand un composant d’ALOHA 2 a besoin d’attention, vous pouvez le réparer avec des pièces de n’importe quel fournisseur de quincaillerie correct.
L’avantage de la réparabilité
Contrairement aux robots industriels propriétaires qui nécessitent des techniciens spécialisés même pour des réparations mineures, ALOHA 2 est conçue pour être réparée par ses utilisateurs. Si une pince casse, une articulation s’use ou un support de caméra se desserre, les utilisateurs n’ont pas besoin de la renvoyer au fabricant ni d’attendre des pièces de rechange coûteuses. Grâce à sa conception ouverte et à l’utilisation de matériaux largement disponibles, ALOHA 2 peut être réparée avec des pièces imprimées en 3D, des fixations génériques et des composants d’un atelier d’usinage local. Par exemple : imaginez attendre six semaines un technicien d’usine, contre réparer une pince ALOHA 2 en quelques heures. Cette réparabilité ne concerne pas seulement les économies : elle concerne la longevité.
Des choix de conception astucieux (comme les pinces transparentes)
L’ingénierie d’ALOHA 2 regorge de petites mais essentielles optimisations qui améliorent l’utilisabilité. Un exemple marquant est celui des pinces transparentes. Contrairement aux pinces opaques traditionnelles, la conception des doigts transparents d’ALOHA 2 permet aux opérateurs de confirmer visuellement la précision de la prise lors de tâches délicates. Cette caractéristique modeste mais significative améliore l’interaction homme-robot et rend les tâches de manipulation fine bien plus intuitives. Dans la robotique traditionnelle, on l’aurait écartée comme de l’esthétique.
Parmi les autres améliorations de conception astucieuses :
- Des pinces sur rail à faible friction qui réduisent considérablement la fatigue de l’opérateur.
- Une compensation de gravité passive qui réduit la tension pendant la téléopération.
- Des supports de doigts interchangeables pour des adaptations propres à chaque tâche.
Chaque choix dans la conception d’ALOHA 2 sert un but : repousser les performances et rendre la robotique plus accessible, réparable et modifiable.
L’apprentissage par démonstration
Les robots devraient apprendre comme les humains : non pas à travers d’interminables lignes de code, mais en observant et en imitant. Comment programmer un robot pour qu’il adapte la force de sa prise à différents objets ? Comment coder les ajustements subtils nécessaires pour enfiler une aiguille ?
Vous voulez qu’un robot saisisse un objet ? Vous définissez manuellement les points de prise précis, les trajectoires de mouvement et les paramètres de force. Vous voulez qu’il s’adapte à différents objets ? C’est un nouveau tour de réglage des paramètres, d’annotation des données et de débogage. Pensez à la façon dont les humains apprennent des tâches physiques complexes. Un maître artisan n’enseigne pas à son apprenti en écrivant des équations mathématiques de force et de mouvement : il fait une démonstration. L’apprenti regarde, imite et développe peu à peu une compréhension intuitive de la tâche.
ALOHA 2 élimine ce goulot d’étranglement. Au lieu d’écrire du code pour chaque action, les utilisateurs peuvent enseigner au système en démontrant physiquement les tâches. Cette approche réduit considérablement le besoin de programmation de bas niveau, rendant l’apprentissage robotique plus intuitif et accessible aussi bien aux non-programmeurs qu’aux chercheurs et aux ingénieurs.
La science derrière l’apprentissage par démonstration
À la base, le système d’apprentissage d’ALOHA 2 suit un principe puissant :
- Le système de téléopération maître-esclave enregistre les démonstrations humaines en temps réel.
- Les données collectées sont transformées en politiques de contrôle à partir desquelles le robot peut généraliser.
- ALOHA 2 rejoue, affine et améliore ses performances au fil des tentatives répétées.
Chaque démonstration génère des milliers de points de données montrant non seulement ce que font les humains, mais aussi comment ils le font. Lorsqu’un opérateur démontre l’enfilage d’une aiguille, le système enregistre :
- Les positions et vitesses articulaires précises
- Les ajustements de force lors des manipulations délicates
- Le retour visuel sous plusieurs angles de caméra
- Les relations temporelles entre les mouvements
Ces données deviennent le matériau d’entraînement d’algorithmes d’apprentissage automatique capables d’extraire des schémas et des stratégies de l’expertise humaine. En substance, au lieu de coder en dur la façon de plier un T-shirt, de nouer un nœud ou de manipuler des objets délicats, ALOHA 2 observe, apprend et affine dynamiquement ses compétences, ce qui la rend bien plus polyvalente que les approches traditionnelles fondées sur la programmation.
Mettre à l’échelle l’apprentissage robotique avec des données de haute qualité
La clé de tout bon modèle d’apprentissage automatique, ce sont les données, et ALOHA 2 est conçue pour la collecte de données à grande échelle, à un niveau sans précédent. Équipée de caméras Intel RealSense D405 placées au-dessus et montées au poignet, le système capture une entrée visuelle multi-angles aux côtés de données de mouvement à haute fréquence, lui permettant d’apprendre avec un niveau de précision sans précédent.
- Journalisation du mouvement à 50 Hz — capture des données fines de position et de vitesse articulaires
- Données de vision RGB-D — fournissent une perception tenant compte de la profondeur pour les tâches de manipulation complexes
- Collecte de démonstrations variées — des milliers de démonstrations enregistrées permettent une meilleure généralisation sur différentes tâches
- Cet immense jeu de données sert de carburant à la robotique pilotée par l’IA, permettant un meilleur apprentissage par imitation, apprentissage par renforcement et optimisation des politiques.
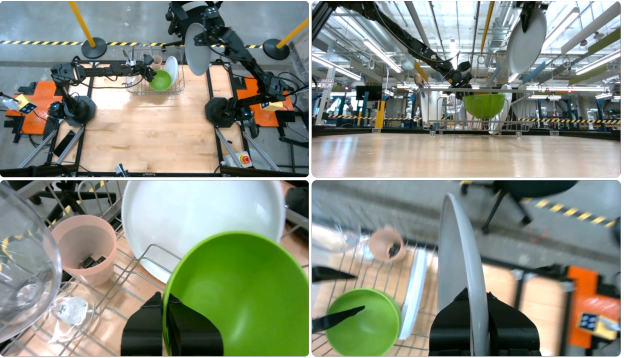
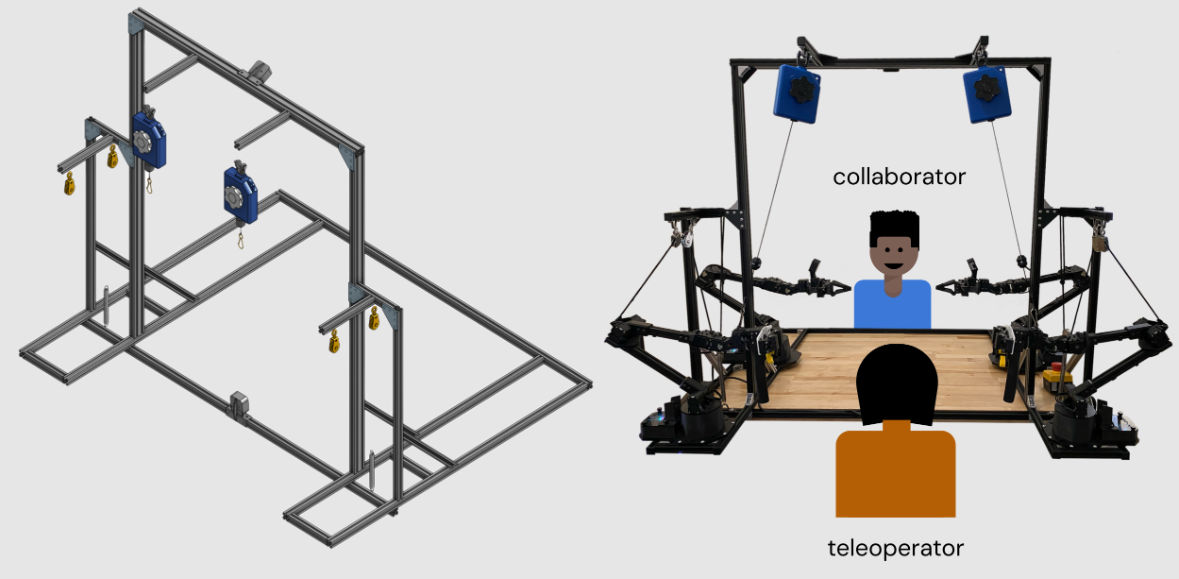
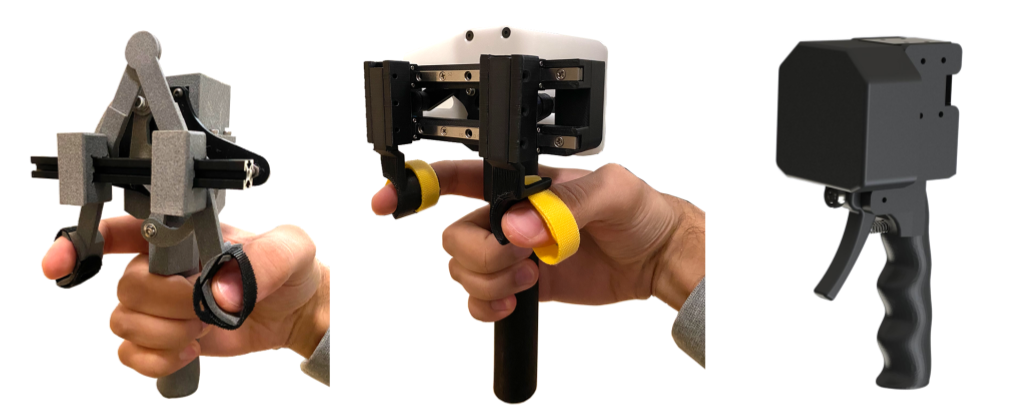
Source : L’article An Enhanced Low-Cost Hardware
for Bimanual Teleoperation
Faire de l’apprentissage robotique évolutif avec MuJoCo
L’intégration d’ALOHA 2 avec MuJoCo (Multi-Joint Dynamics with Contact) est le pont entre la démonstration humaine et l’apprentissage robotique évolutif. Le moteur physique offre un environnement très précis et peu coûteux pour tester et affiner les comportements robotiques avant leur déploiement dans le monde réel.
MuJoCo permet aux chercheurs de :
- Tester les politiques de contrôle en microsecondes au lieu de minutes, accélérant les cycles de développement
- Explorer les cas limites qui seraient trop dangereux pour du matériel réel, réduisant les pannes coûteuses
- Générer des données d’entraînement synthétiques en faisant varier les paramètres de démonstrations réussies, élargissant la diversité du jeu de données
- Valider les comportements appris dans différentes conditions environnementales, améliorant l’adaptabilité dans le monde réel
Et surtout, l’identification précise du système d’ALOHA 2 assure un transfert fluide de la simulation à la réalité.
Les politiques affinées dans MuJoCo se traduisent directement sur le robot physique, éliminant l’« écart simulation-réalité » qui afflige la robotique depuis des décennies. Cela garantit que les comportements développés en simulation restent fiables à l’exécution dans le monde réel, sans réglage interminable par essais et erreurs.
Avec des démonstrations en conditions réelles, une collecte de données à grande échelle et une simulation haute fidélité, ALOHA 2 façonne l’avenir d’un apprentissage robotique adaptatif, évolutif et intuitif pour l’humain.
L’avenir de la robotique est ouvert
Pendant des décennies, la robotique a été verrouillée derrière des coûts exorbitants, des écosystèmes contrôlés par les fournisseurs et des architectures rigides qui étouffent l’innovation. ALOHA 2 prouve que nous n’avons pas à accepter ce statu quo. Ce n’est pas seulement un système robotique plus abordable : c’est une vision fondamentalement différente de la manière dont la robotique devrait être construite, partagée et faite évoluer.
Les robots industriels traditionnels sont des boîtes noires, conçues pour être exclusives, coûteuses et rigides. ALOHA 2 renverse complètement ce modèle. Tout est ouvert — des fichiers CAO aux algorithmes de contrôle — donnant aux développeurs, chercheurs et ingénieurs la liberté de bricoler, d’itérer et de bâtir sur le travail existant. Fini d’attendre que les fabricants publient des mises à jour. Fini le verrouillage dans du matériel propriétaire. Si vous voulez modifier quelque chose, vous le pouvez. Si vous voulez améliorer quelque chose, vous le ferez.
C’est le « moment Linux » de la robotique : le point où une plateforme open source devient assez puissante pour rivaliser avec les systèmes propriétaires tout en restant assez accessible pour démocratiser toute une industrie. ALOHA 2 offre une précision submillimétrique, une téléopération sans effort et un apprentissage robotique à grande échelle, le tout à une fraction du coût des systèmes traditionnels. Elle surpasse ses concurrents non pas parce qu’elle est verrouillée par le secret des entreprises, mais parce qu’elle est ouverte à la collaboration des esprits les plus brillants de la robotique. Voilà à quoi ressemble la véritable innovation : pas de barrières artificielles, pas de barrières payantes, juste un écosystème grandissant de bâtisseurs qui font progresser la robotique. DeepMind, Stanford et des laboratoires de robotique du monde entier prouvent déjà ce qui est possible lorsque l’open source occupe le devant de la scène. C’est maintenant à votre tour.
Si vous êtes développeur, chercheur ou quelqu’un qui croit qu’il faut briser les barrières plutôt que les contourner, c’est votre moment. ALOHA 2 est une invitation. Découvrez le code sur GitHub. Explorez les modèles MuJoCo. Procurez-vous le matériel. Expérimentez avec lui. Poussez-le plus loin. Faites partie de l’avenir où la robotique appartient à tous.
Connectez-vous pour laisser un commentaire.