用开源硬件构建机器人的未来
 2888
2888
我们正站在开源硬件革命的边缘,如果你一直在关注,就能感受到这一点。最近围绕 DeepSeek 和 OpenAI 的热潮不只是关于 AI 模型,它是一场更大变革的征兆。开放技术的精神正在渗透进工程的每一个层面,而机器人技术就是下一个。
Yann LeCun 是开源 AI 领域的思想领袖,多年来一直在强调开源系统的重要性,而他是对的:专有技术造就了一座座孤岛,开源技术则推动创新。软件的“Linux 时刻”开启了指数级发展的时代,如今机器人技术正站在同样的悬崖边。但问题在于:当软件在开放生态中繁荣发展时,硬件却仍被禁锢于专有生态、臃肿的成本和受限的获取门槛之中。
为什么硬件需要属于自己的“Linux 时刻”
几十年来,机器人技术一直困在一个尖端技术被锁在闭门之内的世界里。想要精密机器人,你就得为高端工业机械臂一掷千金。想要尝试遥操作,你就被迫在昂贵的闭环系统中工作,而这些系统扼杀了定制与折腾的空间。这是一个让资金雄厚的研究实验室或大型企业之外的所有人都难以推进的生态。
ALOHA 2 打破了这一范式。它不只是又一个研究项目,而是迈向机器人技术普及的大胆一步。凭借开放的硬件设计、模块化组件,以及媲美(甚至超越)昂贵专有系统的能力,ALOHA 2 正在打造一个创新不被付费墙限制的平台。它为独立开发者、研究人员和爱好者提供推动机器人前进的工具——正如 Linux 对软件所做的那样。

这篇文章是写给那些懂行的人——创造者、黑客,以及那些从小就把东西拆开只为弄清它们如何运作的人。我们将深入剖析传统遥操作的问题、ALOHA 2 带来的突破,以及开放硬件如何为机器人技术的未来奠定基础。如果你曾梦想亲手攒出自己的精密机器人系统,那么一切就从这里开始。
遥操作中的成本壁垒
几十年来,机器人行业一直被高不可攀的成本拦在门外。工业级遥操作系统的价格往往超过 $100,000,这源于对高精度执行器、专有控制系统和大量校准要求的需求。
当厂商谈论“工业级”遥操作时,他们其实是在说一张由相互依赖的专有系统织成的复杂大网。一台具备遥操作能力的基础机械臂起价 $50K–80K,但这只是开始。再加上必备的力反馈系统($20K 以上)、每年的软件授权费($10K–15K)和专用校准设备,在写下第一行代码之前你就要面对远超 $100K 的开销。而隐藏成本更深。大多数系统需要专门的培训项目(每位操作员 $5K)、由工厂技师定期重新校准(每次上门 $2K–3K),以及每年可达数万美元的维护合同。这不只是昂贵——这是一种刻意设计的商业模式,让用户即便做最基础的改动也要依赖供应商。
即便是常用中端机械臂的研究配置,也要花费数万美元——这把使用权限限制在了资金雄厚的机构和企业手中。这道资金壁垒扼杀了创新,使机器人技术成为一个封闭的领域。
传统任务空间映射的局限
如果传统系统能带来完美无瑕的性能,高昂的成本或许还说得过去。可它们却建立在一种根本上有缺陷的方法之上:任务空间映射。这种方法试图把人手的动作直接转换为机器人末端执行器的位置,看似直观,实际却会引发一连串问题。
第一个问题是延迟
大多数商用系统的控制频率仅为 5–10Hz,在操作员输入与机器人响应之间引入了 100–200ms 的延迟。要理解这为何重要,可以做个实验:在一次有 200ms 延迟的视频通话中观察自己手部的动作。即便是简单的任务也会变成令人抓狂的折磨。现在想象一下,在同样的延迟下去穿针引线或操控易碎的物体。
第二个问题更为隐蔽:运动学奇异点
当机械臂接近某些位姿(例如完全伸展)时,传统的逆运动学算法会以惊人的方式崩溃。系统要么卡死,要么做出无法预测的动作。经验丰富的操作员学会了回避这些“危险区域”,但这意味着他们要不断与系统较劲,而无法专注于真正的任务。
也许最具破坏性的是对操作员身体的损耗
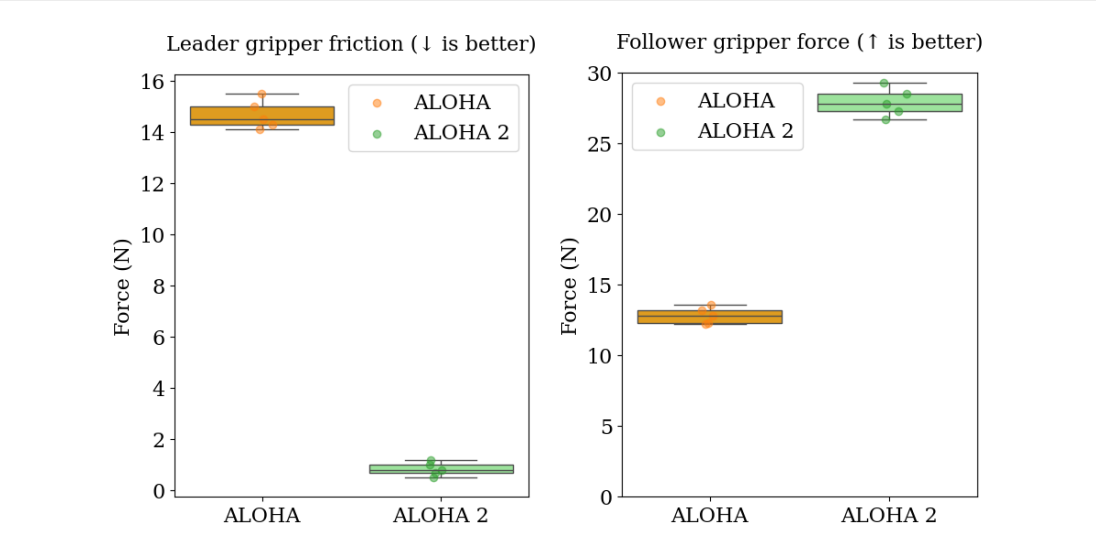
传统的主端夹爪需要相当大的力才能操作,通常超过 14.68 牛顿(N),在长时间作业中会导致迅速疲劳。这相当于一直用指尖捏住 1.5kg 的重物。在八小时的轮班中,这会造成操作员严重疲劳,并恰恰在最需要精度的时候降低精度。
对专有系统的依赖
为弥补这些局限,厂商依赖于专有的高成本解决方案。内置精密控制机构的高级机械臂确实显著提升了性能,但代价极其高昂。此外,这些系统往往被锁在封闭的软件生态中,限制了定制,也把使用权限限定在那些付得起昂贵授权费的人身上。
挣脱束缚:ALOHA 2 的关节空间革命
遥操作的根本问题不只在于成本——还在于控制。传统系统试图把人的动作直接映射到机器人末端执行器上,这种做法看似直观,却从根本上误解了人类是如何自然地控制复杂动作的。ALOHA 2 采取了一条截然不同的路线,专注于关节空间映射,结果是变革性的。如果说传统遥操作是建立在过时控制方法和供应商锁定之上的纸牌屋,那么 ALOHA 2 就是那只拆楼的铁球。
理解关节空间映射
想想你伸手去拿杯子的过程。你并不会有意识地去计算手在三维空间中的精确位置——你的大脑会自然地协调肩、肘、腕关节的运动。ALOHA 2 的工作方式正是如此。它实时地把主端机器人的关节角度映射到从端机器人的关节上。这带来了更平滑、更可预测的控制,消除了无规律的运动缩放,并让操作员以更少的力气获得更高的精度。
这一看似简单的方法转变,会层层传导,带来遥操作各个方面的显著改进。
控制频率:从卡顿到流畅
大多数商用遥操作系统以迟缓的 5–10Hz 控制频率运行,在输入与执行之间引入 100–200ms 的延迟。ALOHA 2 则以干脆利落的 50Hz 运行。这不只是数字游戏——而是“与系统较劲”和“感觉像是自身动作的自然延伸”之间的区别。在 50Hz 下,控制回路每 20 毫秒运行一次,快到操作员反馈说机器人感觉像是手臂的直接延伸,而不是一件他们费力遥控的远端工具。
大幅降低操作力与自然的主从控制
传统系统仅仅为了操作夹爪就需要令人吃不消的 14.68N 力——想象一下在不停压紧一根硬弹簧的同时还要保持精确控制。ALOHA 2 把这一数值锐减到仅 0.84N。
| 特性 | ALOHA 2 | 传统系统 |
|---|---|---|
| 控制频率 | 50Hz | 5 – 10Hz |
| 延迟 | < 20ms | 100 – 200ms |
| 主端夹爪操作力 | 0.84N | 14.68N |
| 从端闭合力 | 27.9N | 12.8N |
| 成本 | 传统系统成本的一小部分 | $100k+ |
操作员可以工作得更久、更精确,而不必忍受手部疲劳。主从系统确保操作员的每一个动作都被从端机器人自然而直观地复现,从而以最小的认知负担带来浑然天成的遥操作体验。
这是易用性上的根本转变。
面向复杂任务的亚毫米级精度
工业遥操作常常让人联想到粗糙、不精确、需要操作员不断修正的动作。也许最了不起的是,这种易用性的提升还伴随着精度的提高。ALOHA 2 的夹爪所提供的力精度是传统系统的两倍以上(27.9N 对 12.8N),从而能够完成那些过去离开极其昂贵的硬件便无法实现的精细操作任务。
控制架构与软件栈
ALOHA 2 的核心控制系统建立在 ROS2 (Robot Operating System 2) 之上,确保了模块化、实时性能,以及与机器人学习流水线的无缝集成。与需要底层 CAN 编程的传统遥操作配置不同,ALOHA 2 通过 Interbotix(一个基于 Python 的控制库)简化了软件的复杂度,能减少数百行代码的开发量。
ALOHA 2 软件栈的关键组件:
- ROS2 中间件:负责主臂与从臂之间的实时通信。
- PID 与阻抗控制:确保平滑而自适应的遥操作。
- 预装的机器学习环境:预装 Ubuntu、ROS2 和 Interbotix,开箱即可部署。
- 重力补偿模块:利用被动回收机构减轻操作员的负担。
让这一切成真的工程
性能固然很好——但你是否想过重新思考机器人系统究竟应该如何构建?当传统厂商为控制权和锁定而优化时,ALOHA 2 优化的是更有价值的东西:创新的自由。
模块化设计理念
想尝试一种新的夹爪设计?你可以用提供的 CAD 文件用 3D 打印做出来。需要修改控制系统?软件是开源的,而且文档完善。这正是 ALOHA 2 最具代表性的特征之一——它的模块化架构。它不会把你锁死在一个单一组件出故障就让整机报废的庞大单体系统里,而是在每一个层级上都拥抱模块化。从夹爪到执行器,每个子系统都被设计成易于更换、升级或改造。
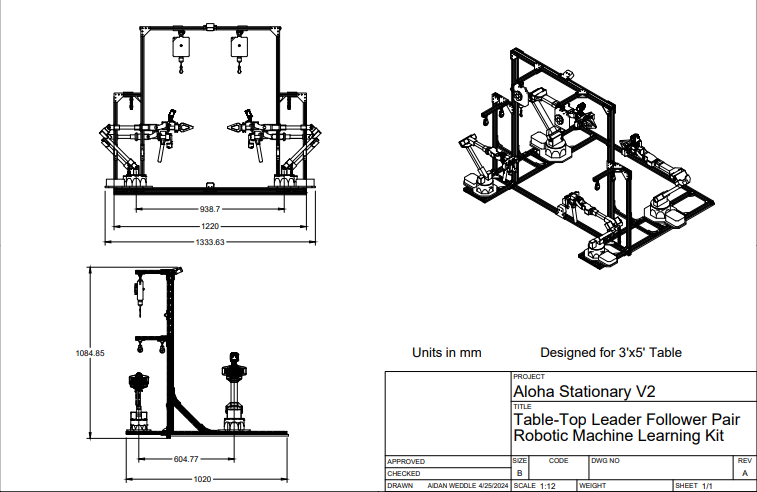
| 组件 | 规格 |
|---|---|
| 主臂 | WidowX 250 S – ALOHA Version |
| 从臂 | ViperX 300 S – ALOHA Version |
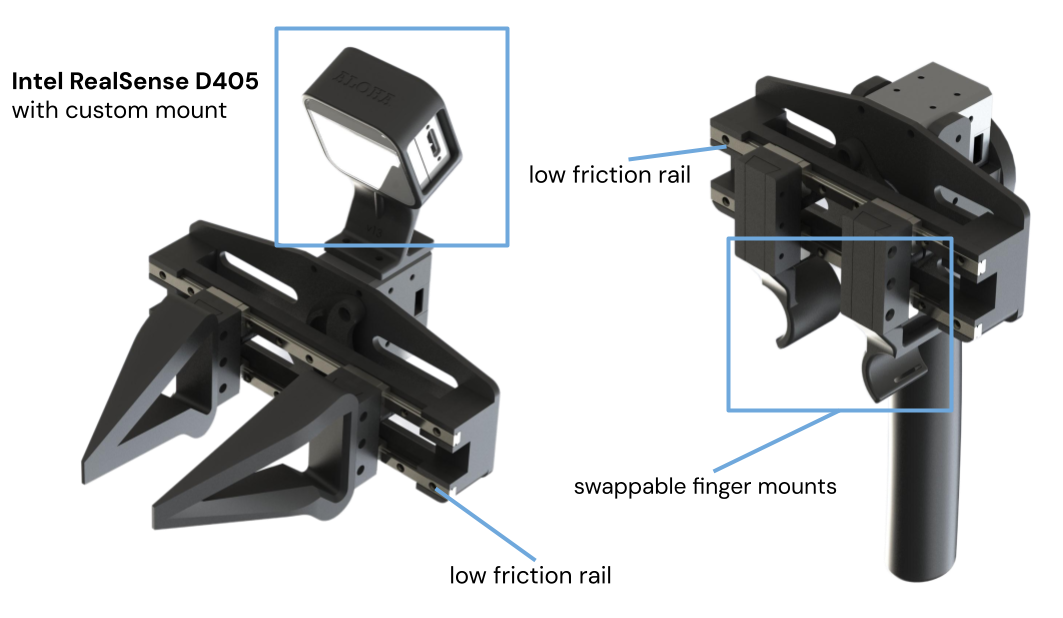
| 摄像头 | 4x Intel RealSense D405 |
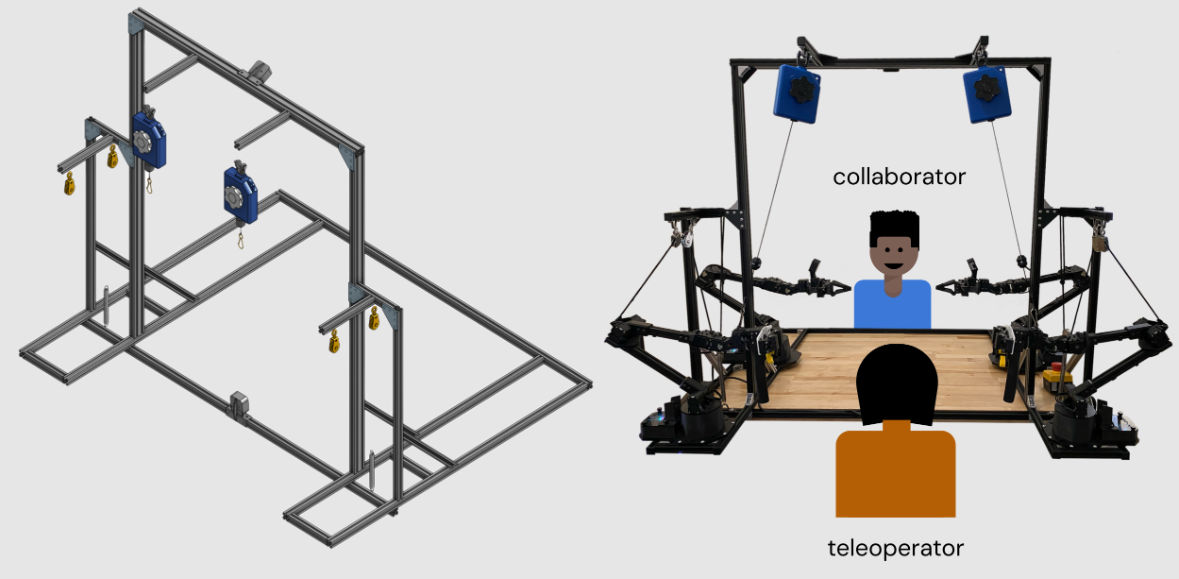
| 机架 | 模块化,铝型材 |
| 计算机 | 高性能笔记本电脑(预装 Ubuntu、ROS2、Interbotix) |
对标准件的策略性运用
机器人厂商一直向我们灌输一个说法:精度离不开专有零件和封闭系统。ALOHA 2 颠覆了这一模式,凡是可能之处都策略性地采用现成的标准件。通过使用标准的 Dynamixel 电机和现成组件,它在实现亚毫米级精度的同时,让每一个零件都可维护、可更换。当传统工业机械臂发生故障时,你将面临数周的停机,苦苦等待工厂上门服务。而当 ALOHA 2 的某个组件需要处理时,你可以用任何一家像样的硬件供应商的零件自行修复。
可维修性的优势
与那些即便是小修也需要专门技师的专有工业机器人不同,ALOHA 2 从设计上就是为了让用户自己维修。如果夹爪坏了、关节磨损了或摄像头支架松动了,用户无需把它寄回厂家,也不用等待昂贵的备件。得益于开放的设计和对广泛易得材料的使用,ALOHA 2 可以用 3D 打印的零件、通用紧固件和本地机械加工车间的部件来修复。比如,设想一下等待工厂技师六周,对比起在几小时内修好一只 ALOHA 2 夹爪。这种可维修性不仅关乎省钱——更关乎使用寿命。
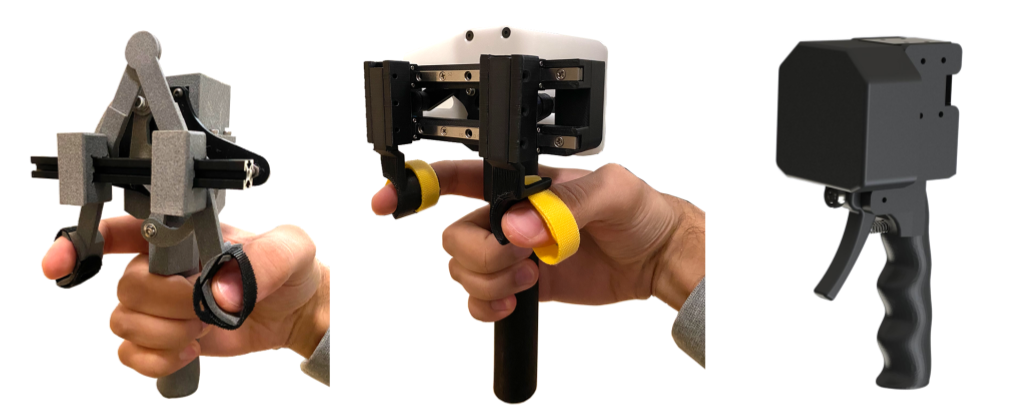
巧妙的设计选择(例如透明夹爪)
ALOHA 2 的工程设计中充满了微小却关键的优化,提升了易用性。一个突出的例子是透明夹爪。与传统的不透明夹爪不同,ALOHA 2 的透明“手指”设计让操作员在精细任务中能够用肉眼确认抓取的精度。这个微小却意义重大的特性改善了人机交互,让精细操作任务直观得多。在传统机器人领域,这只会被当作外观点缀而被忽视。
其他巧妙的设计改进还包括:
- 基于导轨的低摩擦夹爪,大幅减轻操作员疲劳。
- 被动重力补偿,减轻遥操作过程中的负担。
- 可更换的手指安装座,便于针对不同任务进行适配。
ALOHA 2 设计中的每一个选择都服务于一个目的——提升性能,并让机器人更易获取、易维修、易折腾。
从示范中学习
机器人应该像人类那样学习——不是靠没完没了的代码,而是靠观察与模仿。你要如何编程让机器人针对不同物体调整抓握力度?你要如何用代码写出穿针引线所需的那些细微调整?
想让机器人拿起一个物体?你得手动定义精确的抓取点、运动轨迹和力参数。想让它适应不同的物体?那又是新一轮的参数调优、数据标注和调试。想想人类是怎样掌握复杂的体力技能的。一位手艺大师并不是靠写下关于力与运动的数学方程来教徒弟的——他是亲手示范。徒弟在一旁观看、模仿,逐渐对这项技艺形成直觉性的理解。
ALOHA 2 消除了这一瓶颈。用户无需为每个动作编写代码,而是可以通过亲手示范任务来教会系统。这种方式大幅降低了对底层编程的需求,让机器人学习对非程序员、研究人员和工程师而言都更加直观、更易上手。
从示范中学习背后的科学
ALOHA 2 的学习系统在本质上遵循一条强有力的原则:
- 主从遥操作系统实时记录人类的示范。
- 采集到的数据被处理成控制策略,机器人可以从中进行泛化。
- ALOHA 2 在反复尝试中回放、优化并改进自己的表现。
每一次示范都会产生成千上万个数据点,不仅展示人类做了什么,还展示他们是怎么做的。当操作员示范穿针引线时,系统会记录:
- 精确的关节位置与速度
- 精细操作过程中的力调整
- 来自多个摄像头角度的视觉反馈
- 动作之间的时间关系
这些数据成为机器学习算法的训练材料,使其能够从人类的专业技能中提炼出模式和策略。从本质上说,ALOHA 2 不是把如何叠一件 T 恤、打一个结或操控易碎物体硬编码进去,而是去观察、去学习,并动态地打磨自己的技能,这使它比传统的基于编程的方法通用得多。
用高质量数据扩展机器人学习
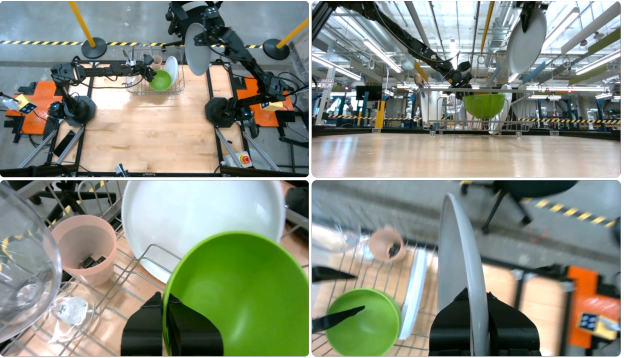
任何优秀的机器学习模型的关键都是数据,而 ALOHA 2 正是为前所未有规模的大规模数据采集而设计的。系统配备了顶置式和腕部安装的 Intel RealSense D405 摄像头,可在采集高频运动数据的同时捕获多角度视觉输入,从而以前所未有的精度水平进行学习。
- 50Hz 运动记录——捕获细粒度的关节位置与速度数据
- RGB-D 视觉数据——为复杂操作任务提供具备深度感知的感知能力
- 多样化的示范采集——成千上万条记录下来的示范使其能够在不同任务间更好地泛化
- 这一海量数据集是 AI 驱动机器人的燃料,可实现更出色的模仿学习、强化学习和策略优化。
来源:论文《An Enhanced Low-Cost Hardware
for Bimanual Teleoperation》
用 MuJoCo 实现可扩展的机器人学习
ALOHA 2 与 MuJoCo (Multi-Joint Dynamics with Contact) 的集成,是连接人类示范与可扩展机器人学习之间的桥梁。这个物理引擎提供了一个高精度、低成本的环境,可在部署到现实世界之前对机器人行为进行测试和打磨。
MuJoCo 让研究人员能够:
- 以微秒而非分钟的量级测试控制策略,加快开发周期
- 探索那些对真实硬件而言过于危险的边界情况,减少代价高昂的故障
- 通过改变成功示范的参数来生成合成训练数据,扩展数据集的多样性
- 在不同环境条件下验证已学到的行为,提升在现实世界中的适应性
最重要的是,ALOHA 2 精确的系统辨识确保了从仿真到现实的无缝迁移。
在 MuJoCo 中打磨好的策略可以直接迁移到实体机器人上,消除了几十年来一直困扰机器人领域的“仿真到现实的鸿沟”。这保证了在仿真中开发出的行为在现实世界的执行中依然可靠——无需无休止的试错调参。
凭借现实世界的示范、大规模的数据采集和高保真的仿真,ALOHA 2 正在塑造自适应、可扩展且符合人类直觉的机器人学习的未来。
机器人的未来是开放的
几十年来,机器人技术一直被锁在高得离谱的成本、由供应商把控的生态以及僵化的架构之后,扼杀着创新。ALOHA 2 证明了我们不必接受这种现状。它不只是一个更实惠的机器人系统——它代表了一种关于机器人应当如何构建、共享与演进的、根本不同的愿景。
传统工业机器人是黑箱,被刻意设计成封闭、昂贵且僵化。ALOHA 2 把这套模式彻底翻转过来。从 CAD 文件到控制算法,一切都是开放的——让开发者、研究人员和工程师拥有去折腾、去迭代、在既有成果之上继续构建的自由。再也不必等待厂商发布更新。再也不必被锁死在专有硬件上。想改点什么,你就能改。想改进点什么,你就会去做。
这就是机器人的 Linux 时刻——一个开源平台强大到足以与专有系统抗衡,同时又易得到足以让整个行业大众化的转折点。ALOHA 2 带来了亚毫米级精度、毫不费力的遥操作和大规模机器人学习——而这一切只需传统系统成本的一小部分。它胜过竞争对手,不是因为它被锁在企业机密之后,而是因为它向机器人领域最聪明的头脑敞开协作的大门。这才是真正的创新该有的样子——没有人为的壁垒,没有付费墙,只有一个不断壮大的、推动机器人前进的创造者生态。DeepMind、Stanford 以及全球各地的机器人实验室,已经在证明当开源走上舞台中央时,一切皆有可能。现在,轮到你了。
如果你是开发者、研究人员,或是一个相信打破壁垒而非绕开壁垒的人,那么这就是属于你的时刻。ALOHA 2 是一份邀请。去看看 GitHub 上的代码。去探索 MuJoCo 模型。把硬件搞到手。动手实验。把它推得更远。成为机器人属于每一个人的那个未来的一部分。
登录后即可发表评论。