Construyendo el futuro de la robótica con hardware de código abierto
 2880
2880
Estamos al borde de una revolución del hardware de código abierto y, si has estado prestando atención, puedes sentirlo. El reciente revuelo en torno a DeepSeek y OpenAI no trata solo de modelos de IA: es un síntoma de un cambio mucho mayor. El espíritu de la tecnología abierta se está colando en cada capa de la ingeniería, y la robótica es la siguiente.
Yann LeCun, líder de opinión en el ámbito de la IA de código abierto, lleva años predicando la importancia de los sistemas de código abierto, y tiene razón: la tecnología propietaria crea silos, mientras que la tecnología de código abierto alimenta la innovación. El momento Linux del software desató una era de desarrollo exponencial, y ahora la robótica se encuentra en ese mismo precipicio. Pero hay un problema: mientras el software ha florecido en ecosistemas abiertos, el hardware ha permanecido encadenado a ecosistemas propietarios, costes desorbitados y un acceso restringido.
Por qué el hardware necesita su «momento Linux»
Durante décadas, la robótica ha estado atrapada en un mundo donde la tecnología de vanguardia permanece tras puertas cerradas. Si querías robótica de precisión, tenías que desembolsar una fortuna por brazos industriales de gama alta. Si querías experimentar con la teleoperación, te veías obligado a trabajar dentro de sistemas caros y de bucle cerrado que ahogaban la personalización y la experimentación. Es un ecosistema que desalienta el progreso de cualquiera que esté fuera de los laboratorios de investigación bien financiados o de las grandes corporaciones.
ALOHA 2 rompe ese paradigma. No es solo otro proyecto de investigación: es un paso audaz hacia la democratización de la robótica. Con un diseño de hardware abierto, componentes modulares y la capacidad de igualar (o incluso superar) costosos sistemas propietarios, ALOHA 2 está creando una plataforma donde la innovación no está limitada por barreras de pago. Da a desarrolladores, investigadores y aficionados independientes las herramientas para impulsar la robótica, igual que Linux hizo con el software.

Este artículo es para quienes lo entienden: los constructores, los hackers, los que crecieron desmontando cosas solo para ver cómo funcionaban. Nos sumergiremos a fondo en los problemas de la teleoperación tradicional, en los avances que aporta ALOHA 2 y en cómo el hardware abierto está sentando las bases del futuro de la robótica. Si alguna vez soñaste con montar tu propio sistema robótico de precisión, aquí es donde empieza.
La barrera del coste en la teleoperación
Durante décadas, la industria de la robótica ha permanecido cercada tras costes prohibitivos. Los sistemas de teleoperación de grado industrial suelen llevar etiquetas de precio superiores a 100 000 $, impulsadas por la necesidad de actuadores de alta precisión, sistemas de control propietarios y amplios requisitos de calibración.
Cuando los fabricantes hablan de teleoperación «de grado industrial», en realidad hablan de una compleja red de sistemas propietarios interdependientes. Un brazo robótico básico con capacidades de teleoperación parte de 50 000-80 000 $, pero eso es solo el comienzo. Añade los sistemas obligatorios de retroalimentación de fuerza (más de 20 000 $), las licencias de software anuales (10 000-15 000 $) y el equipo de calibración especializado, y ya superas con creces los 100 000 $ antes de escribir una sola línea de código. Pero los costes ocultos van aún más profundo. La mayoría de los sistemas requieren programas de formación especializados (5000 $ por operador), recalibraciones periódicas por técnicos de fábrica (2000-3000 $ por visita) y contratos de mantenimiento que pueden ascender a decenas de miles al año. Esto no es solo caro: es un modelo de negocio diseñado para mantener a los usuarios dependientes de los proveedores incluso para modificaciones básicas.
Incluso para los montajes de investigación, que a menudo usan brazos robóticos de gama media, el coste es de decenas de miles de dólares, y esto limita el acceso a instituciones y corporaciones bien financiadas. Esta barrera económica ahoga la innovación y convierte la robótica en un dominio exclusivo.
Las limitaciones del mapeo tradicional en el espacio de la tarea
Los elevados costes podrían justificarse si los sistemas tradicionales ofrecieran un rendimiento impecable. En cambio, se basan en un enfoque fundamentalmente defectuoso: el mapeo en el espacio de la tarea. Este método intenta traducir directamente los movimientos de la mano humana en posiciones del efector final del robot, lo que parece intuitivo pero, en la práctica, genera problemas en cascada.
El primer problema es la latencia
La mayoría de los sistemas comerciales funcionan a una frecuencia de control de apenas 5-10 Hz, lo que introduce un retardo de 100-200 ms entre la orden del operador y la respuesta del robot. Para entender por qué importa, prueba este experimento: observa los movimientos de tu mano en una videollamada con 200 ms de retardo. Hasta las tareas sencillas se convierten en un ejercicio de frustración. Ahora imagina intentar enhebrar una aguja o manipular objetos delicados con ese mismo retardo.
El segundo problema es aún más insidioso: las singularidades cinemáticas
Cuando un brazo robótico se acerca a ciertas configuraciones (como la extensión completa), los algoritmos tradicionales de cinemática inversa fallan de forma espectacular. El sistema se bloquea o realiza movimientos impredecibles. Los operadores experimentados aprenden a evitar estas «zonas de peligro», pero eso significa que luchan constantemente contra el sistema en lugar de centrarse en la tarea real.
Quizá lo más dañino es el desgaste físico de los operadores
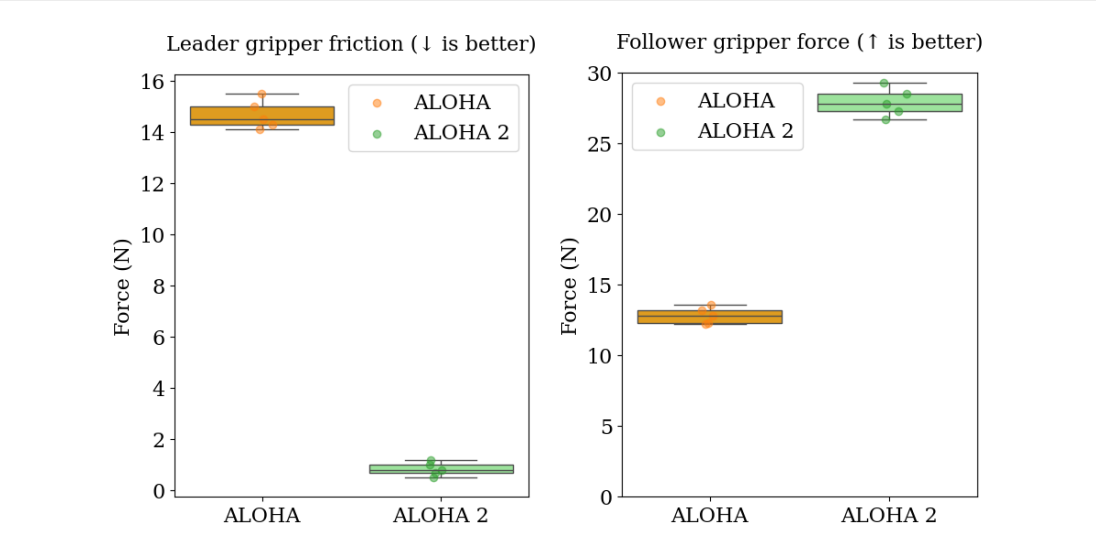
Las pinzas líderes tradicionales requieren una fuerza considerable para operar, a menudo superior a 14,68 newtons (N), lo que provoca una fatiga rápida en sesiones prolongadas. Esto equivale a mantener un agarre de pinza sobre un peso de 1,5 kg. A lo largo de un turno de ocho horas, esto provoca una fatiga grave del operador y reduce la precisión justo cuando más se necesita.
Dependencia de los sistemas propietarios
Para compensar estas limitaciones, los fabricantes recurren a soluciones propietarias de alto coste. Los brazos robóticos avanzados con mecanismos de control de precisión integrados mejoran notablemente el rendimiento, pero a un precio enorme. Además, estos sistemas a menudo quedan encerrados en ecosistemas de software cerrados, lo que restringe la personalización y limita la accesibilidad a quienes pueden permitirse costosas licencias.
Liberarse: la revolución de ALOHA 2 en el espacio de las articulaciones
El problema fundamental de la teleoperación no es solo el coste: también tiene que ver con el control. Los sistemas tradicionales intentan mapear los movimientos humanos directamente sobre los efectores finales del robot, un enfoque que parece intuitivo pero que malinterpreta de raíz cómo controlan los humanos de forma natural los movimientos complejos. ALOHA 2 adopta un enfoque radicalmente distinto al centrarse en el mapeo en el espacio de las articulaciones, y los resultados son transformadores. Si la teleoperación tradicional es un castillo de naipes construido sobre métodos de control obsoletos y la dependencia del proveedor, ALOHA 2 es la bola de demolición.
Qué es el mapeo en el espacio de las articulaciones
Piensa en cómo alcanzas una taza. No calculas conscientemente la posición exacta de tu mano en el espacio 3D: tu cerebro coordina de forma natural el movimiento de las articulaciones del hombro, el codo y la muñeca. Así es exactamente como funciona ALOHA 2. Mapea en tiempo real los ángulos de las articulaciones del robot líder sobre las articulaciones del robot seguidor. Esto permite un control más suave y predecible, elimina el escalado errático del movimiento y posibilita una mayor precisión con menos esfuerzo por parte del operador.
Este cambio de enfoque, en apariencia sencillo, se traduce en cascada en mejoras espectaculares en todos los aspectos de la teleoperación.
Frecuencia de control: del retardo a la fluidez
La mayoría de los sistemas comerciales de teleoperación funcionan a una lánguida frecuencia de control de 5-10 Hz, lo que introduce un retardo de 100-200 ms entre la orden y la ejecución. ALOHA 2 opera a unos nítidos 50 Hz. No se trata solo de un juego de cifras: es la diferencia entre luchar contra el sistema y sentirlo como una extensión natural de tus movimientos. A 50 Hz, el bucle de control se ejecuta cada 20 milisegundos, lo bastante rápido como para que los operadores afirmen que el robot se siente como una prolongación directa de sus brazos, y no como una herramienta remota que intentan controlar.
Reducción drástica de la fuerza y control líder-seguidor natural
Los sistemas tradicionales exigen unos castigadores 14,68 N de fuerza solo para accionar las pinzas; imagina intentar mantener un control preciso mientras aprietas constantemente un resorte rígido. ALOHA 2 reduce esto a tan solo 0,84 N.
| Característica | ALOHA 2 | Sistemas tradicionales |
|---|---|---|
| Frecuencia de control | 50Hz | 5 – 10Hz |
| Latencia | < 20ms | 100 – 200ms |
| Fuerza de la pinza líder | 0.84N | 14.68N |
| Fuerza de cierre del seguidor | 27.9N | 12.8N |
| Coste | Una fracción de los sistemas tradicionales | $100k+ |
Los operadores pueden trabajar durante más tiempo y con mayor precisión, sin sufrir fatiga en las manos. El sistema líder-seguidor garantiza que cada movimiento que realiza el operador sea reflejado de forma natural e intuitiva por el robot seguidor, lo que permite una experiencia de teleoperación orgánica con una carga cognitiva mínima.
Esto supone un cambio fundamental en la usabilidad.
Precisión submilimétrica para tareas complejas
La teleoperación industrial suele asociarse a movimientos toscos e imprecisos que requieren una corrección constante del operador. Y, lo que quizá sea más notable, esta usabilidad mejorada viene acompañada de una mayor precisión. Las pinzas de ALOHA 2 ofrecen más del doble de precisión de fuerza que los sistemas tradicionales (27,9 N frente a 12,8 N), lo que permite tareas de manipulación delicada que antes eran imposibles sin un hardware extremadamente caro.
Arquitectura de control y pila de software
El sistema de control central de ALOHA 2 está construido sobre ROS2 (Robot Operating System 2), lo que garantiza la modularidad, el rendimiento en tiempo real y una integración fluida con las canalizaciones de aprendizaje robótico. A diferencia de los montajes de teleoperación tradicionales, que requieren programación CAN de bajo nivel, ALOHA 2 simplifica la complejidad del software mediante Interbotix, una biblioteca de control basada en Python que recorta el tiempo de desarrollo en cientos de líneas de código.
Componentes clave de la pila de software de ALOHA 2:
- Middleware ROS2: gestiona la comunicación en tiempo real entre los brazos líder y seguidor.
- Control PID e impedancia: garantiza una teleoperación suave y adaptativa.
- Entorno de aprendizaje automático preinstalado: viene con Ubuntu, ROS2 e Interbotix para un despliegue listo para usar.
- Módulo de compensación de gravedad: reduce la tensión del operador mediante mecanismos pasivos de retracción.
La ingeniería que lo hace funcionar
El rendimiento es estupendo, pero ¿alguna vez has pensado en replantear cómo deberían construirse los sistemas robóticos? Mientras los fabricantes tradicionales optimizan para el control y la dependencia, ALOHA 2 optimiza para algo más valioso: la libertad de innovar.
Filosofía de diseño modular
¿Quieres experimentar con un nuevo diseño de pinza? Puedes imprimirlo en 3D usando los archivos CAD proporcionados. ¿Necesitas modificar el sistema de control? El software es de código abierto y está bien documentado. Este es uno de los rasgos más definitorios de ALOHA 2: su arquitectura modular. En lugar de quedar atado a un sistema monolítico en el que un único componente defectuoso puede dejar inservible toda la unidad, ALOHA 2 adopta la modularidad en todos los niveles. Desde las pinzas hasta los actuadores, cada subsistema está diseñado para reemplazarse, actualizarse o modificarse con facilidad.
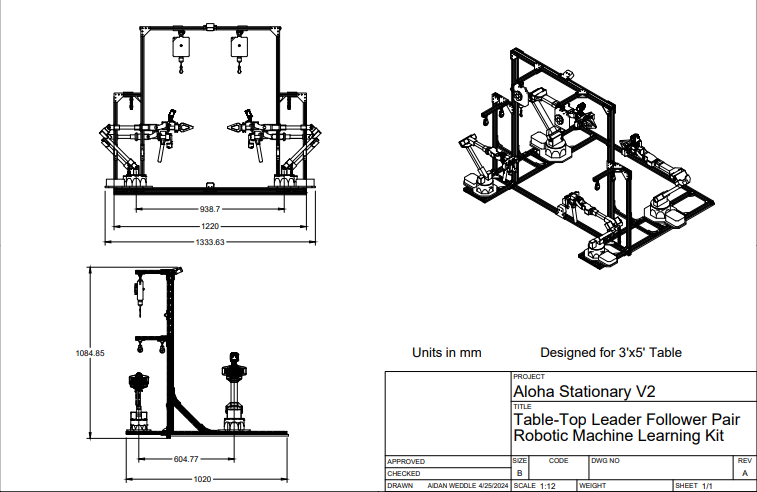
| Componente | Especificación |
|---|---|
| Brazos líderes | WidowX 250 S – ALOHA Version |
| Brazos seguidores | ViperX 300 S – ALOHA Version |
| Cámaras | 4x Intel RealSense D405 |
| Chasis | Modular, perfil de aluminio extruido |
| Computer | Portátil de alto rendimiento (preinstalado con Ubuntu, ROS2, Interbotix) |
Uso estratégico de componentes estándar
Los fabricantes de robótica nos han vendido la idea de que la precisión exige piezas propietarias y sistemas cerrados. ALOHA 2 da la vuelta a este modelo incorporando estratégicamente componentes comerciales siempre que es posible. Al usar motores Dynamixel estándar y componentes listos para usar, alcanza una precisión submilimétrica manteniendo cada pieza reparable y reemplazable. Cuando falla un brazo industrial tradicional, te enfrentas a semanas de inactividad a la espera del servicio de fábrica. Cuando un componente de ALOHA 2 necesita atención, puedes arreglarlo con piezas de cualquier proveedor de hardware decente.
La ventaja de la reparabilidad
A diferencia de los robots industriales propietarios, que requieren técnicos especializados incluso para reparaciones menores, ALOHA 2 está hecha para que la reparen sus propios usuarios. Si una pinza se rompe, una articulación se desgasta o un soporte de cámara se afloja, los usuarios no necesitan devolverla al fabricante ni esperar costosas piezas de repuesto. Gracias a su diseño abierto y al uso de materiales ampliamente disponibles, ALOHA 2 puede repararse con piezas impresas en 3D, tornillería genérica y componentes de un taller mecánico local. Por ejemplo: imagina esperar seis semanas a un técnico de fábrica frente a arreglar una pinza de ALOHA 2 en unas pocas horas. Esta característica de reparabilidad no trata solo del ahorro de costes, sino de la longevidad.
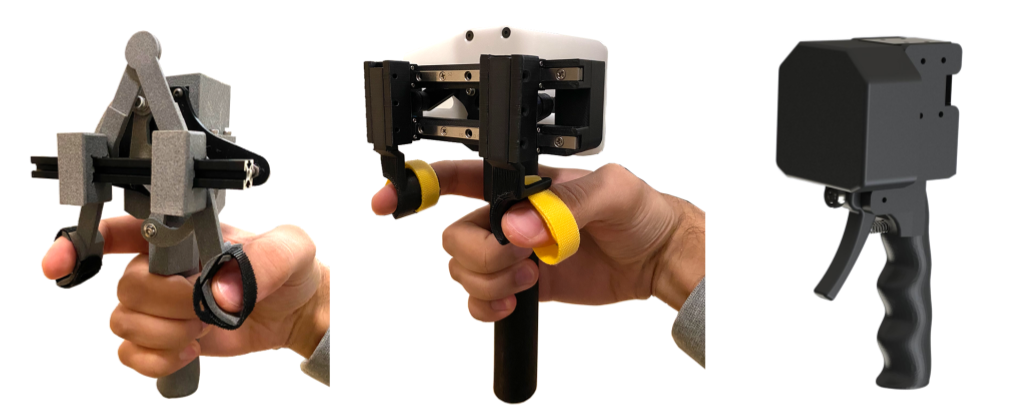
Decisiones de diseño inteligentes (como las pinzas transparentes)
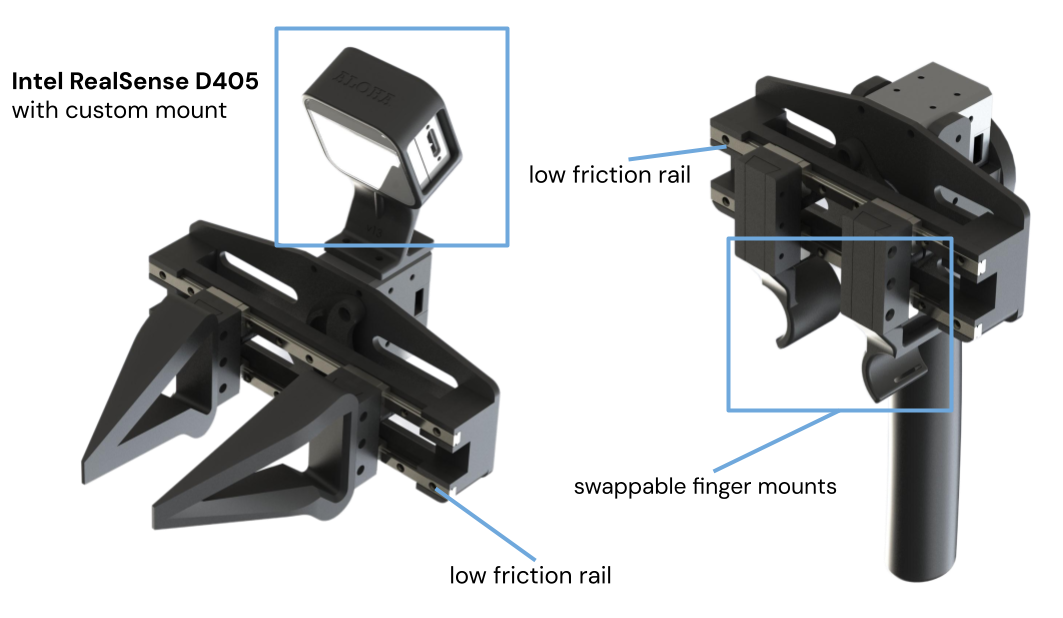
La ingeniería de ALOHA 2 está repleta de optimizaciones pequeñas pero críticas que mejoran la usabilidad. Un ejemplo destacado son las pinzas transparentes. A diferencia de las pinzas opacas tradicionales, el diseño de dedos transparentes de ALOHA 2 permite a los operadores confirmar visualmente la precisión del agarre durante las tareas delicadas. Esta característica, pequeña pero significativa, mejora la interacción entre humano y robot y hace que las tareas de manipulación fina sean mucho más intuitivas. En la robótica tradicional, esto se descartaría como mera estética.
Otras mejoras de diseño inteligentes incluyen:
- Pinzas basadas en raíles de baja fricción que reducen drásticamente la fatiga del operador.
- Compensación pasiva de gravedad que reduce la tensión durante la teleoperación.
- Soportes de dedos intercambiables para distintas adaptaciones específicas de cada tarea.
Cada decisión en el diseño de ALOHA 2 tiene un propósito: impulsar el rendimiento y hacer que la robótica sea más accesible, reparable y modificable.
Aprendizaje por demostración
Los robots deberían aprender como lo hacen los humanos: no mediante interminables líneas de código, sino observando e imitando. ¿Cómo se programa a un robot para que adapte la fuerza de su agarre a distintos objetos? ¿Cómo se codifican los sutiles ajustes necesarios para enhebrar una aguja?
¿Quieres que un robot recoja un objeto? Defines manualmente puntos de agarre precisos, trayectorias de movimiento y parámetros de fuerza. ¿Quieres que se adapte a distintos objetos? Eso supone otra ronda de ajuste de parámetros, etiquetado de datos y depuración. Piensa en cómo aprenden los humanos las tareas físicas complejas. Un maestro artesano no enseña a su aprendiz escribiendo ecuaciones matemáticas de fuerza y movimiento: lo demuestra. El aprendiz observa, imita y desarrolla poco a poco una comprensión intuitiva de la tarea.
ALOHA 2 elimina este cuello de botella. En lugar de escribir código para cada acción, los usuarios pueden enseñar al sistema demostrando físicamente las tareas. Este enfoque reduce drásticamente la necesidad de programación de bajo nivel, lo que hace que el aprendizaje robótico sea más intuitivo y accesible tanto para no programadores como para investigadores e ingenieros.
La ciencia detrás del aprendizaje por demostración
En su esencia, el sistema de aprendizaje de ALOHA 2 sigue un principio poderoso:
- El sistema de teleoperación líder-seguidor registra las demostraciones humanas en tiempo real.
- Los datos recopilados se procesan en políticas de control a partir de las cuales el robot puede generalizar.
- ALOHA 2 reproduce, refina y mejora su desempeño a lo largo de intentos repetidos.
Cada demostración genera miles de puntos de datos que muestran no solo lo que hacen los humanos, sino cómo lo hacen. Cuando un operador demuestra cómo enhebrar una aguja, el sistema registra:
- Posiciones y velocidades precisas de las articulaciones
- Ajustes de fuerza durante las manipulaciones delicadas
- Retroalimentación visual desde múltiples ángulos de cámara
- Relaciones temporales entre los movimientos
Estos datos se convierten en material de entrenamiento para algoritmos de aprendizaje automático capaces de extraer patrones y estrategias de la pericia humana. En esencia, en lugar de codificar de forma rígida cómo doblar una camiseta, atar un nudo o manipular objetos delicados, ALOHA 2 observa, aprende y refina sus habilidades de forma dinámica, lo que la hace mucho más versátil que los enfoques tradicionales basados en la programación.
Escalar el aprendizaje robótico con datos de alta calidad
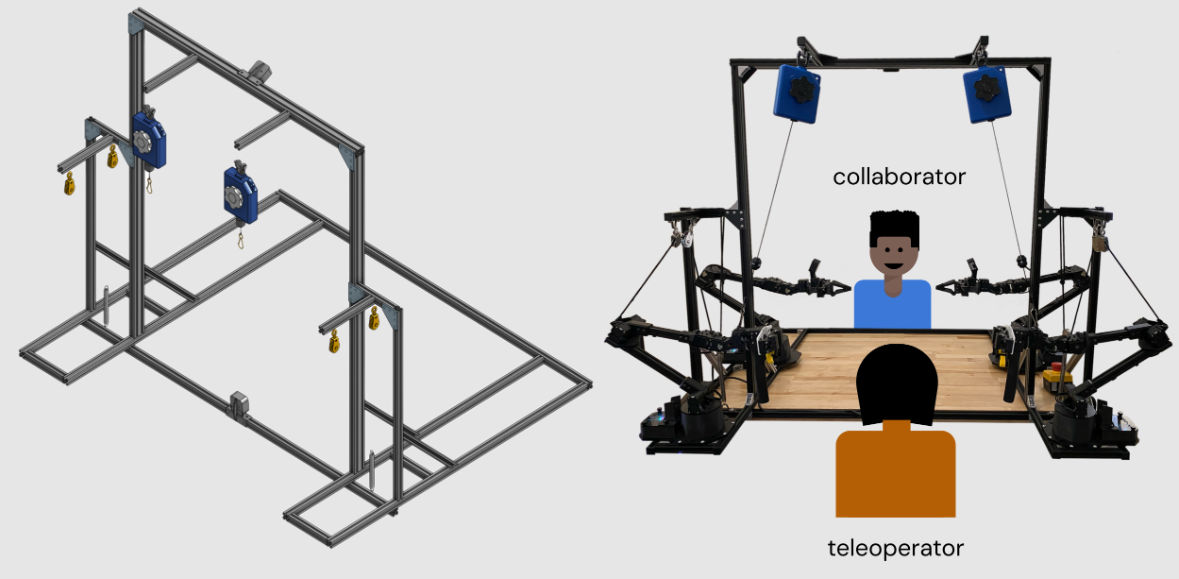
La clave de cualquier buen modelo de aprendizaje automático son los datos, y ALOHA 2 está diseñada para la recopilación de datos a gran escala sin precedentes. Equipada con cámaras Intel RealSense D405 cenitales y montadas en la muñeca, el sistema captura entrada visual multiángulo junto con datos de movimiento de alta frecuencia, lo que le permite aprender con un nivel de precisión sin precedentes.
- Registro de movimiento a 50 Hz: captura datos detallados de posición y velocidad de las articulaciones
- Datos de visión RGB-D: proporcionan una percepción con conciencia de profundidad para tareas de manipulación complejas
- Recopilación diversa de demostraciones: miles de demostraciones grabadas permiten una mejor generalización en distintas tareas
- Este enorme conjunto de datos sirve de combustible para la robótica impulsada por IA, posibilitando un mejor aprendizaje por imitación, aprendizaje por refuerzo y optimización de políticas.
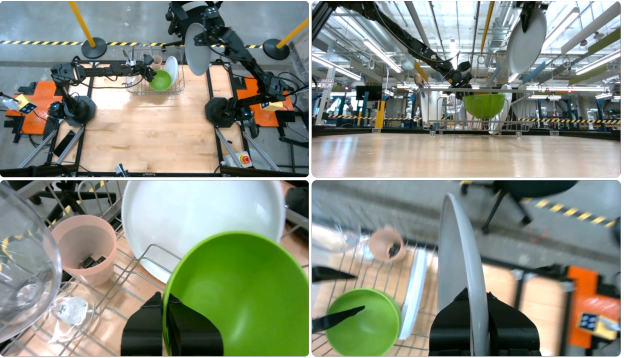
Fuente: Artículo An Enhanced Low-Cost Hardware
for Bimanual Teleoperation
Aprendizaje robótico escalable con MuJoCo
La integración de ALOHA 2 con MuJoCo (Multi-Joint Dynamics with Contact) es el puente entre la demostración humana y el aprendizaje robótico escalable. El motor de física proporciona un entorno muy preciso y de bajo coste para probar y afinar comportamientos robóticos antes de su despliegue en el mundo real.
MuJoCo permite a los investigadores:
- Probar políticas de control en microsegundos en lugar de minutos, acelerando los ciclos de desarrollo
- Explorar casos límite que serían demasiado peligrosos para el hardware real, reduciendo los fallos costosos
- Generar datos de entrenamiento sintéticos variando los parámetros de las demostraciones exitosas, ampliando la diversidad del conjunto de datos
- Validar los comportamientos aprendidos en distintas condiciones ambientales, mejorando la adaptabilidad en el mundo real
Y lo más importante, la precisa identificación del sistema de ALOHA 2 garantiza una transferencia fluida de la simulación a la realidad.
Las políticas afinadas en MuJoCo se trasladan directamente al robot físico, eliminando la «brecha entre simulación y realidad» que ha atormentado a la robótica durante décadas. Esto garantiza que los comportamientos desarrollados en simulación sigan siendo fiables en la ejecución del mundo real, sin un ajuste interminable por ensayo y error.
Con demostraciones del mundo real, recopilación de datos a gran escala y simulación de alta fidelidad, ALOHA 2 está dando forma al futuro del aprendizaje robótico adaptativo, escalable e intuitivo para los humanos.
El futuro de la robótica es abierto
Durante décadas, la robótica ha permanecido encerrada tras costes exorbitantes, ecosistemas controlados por los proveedores y arquitecturas rígidas que ahogan la innovación. ALOHA 2 es la prueba de que no tenemos por qué aceptar este statu quo. No es solo un sistema robótico más asequible: es una visión fundamentalmente distinta de cómo debería construirse, compartirse y evolucionar la robótica.
Los robots industriales tradicionales son cajas negras, diseñadas para ser exclusivas, caras e inflexibles. ALOHA 2 da la vuelta por completo a ese modelo. Todo es abierto, desde los archivos CAD hasta los algoritmos de control, lo que da a desarrolladores, investigadores e ingenieros la ****libertad de experimentar, iterar y construir sobre el trabajo ya existente. No más esperas a que los fabricantes publiquen actualizaciones. No más dependencia del hardware propietario. Si quieres modificar algo, puedes hacerlo. Si quieres mejorar algo, lo harás.
Este es el momento Linux de la robótica: el punto en el que una plataforma de código abierto se vuelve lo bastante potente como para rivalizar con los sistemas propietarios sin dejar de ser lo bastante accesible como para democratizar toda una industria. ALOHA 2 ofrece precisión submilimétrica, teleoperación sin esfuerzo y aprendizaje robótico a gran escala, todo ello a una fracción del coste de los sistemas tradicionales. Supera a sus competidores no porque esté encerrada en el secretismo corporativo, sino porque está abierta a la colaboración de las mentes más brillantes de la robótica. Así es como se ve la innovación real: sin barreras artificiales, sin barreras de pago, solo un ecosistema creciente de constructores que impulsan la robótica hacia adelante. DeepMind, Stanford y laboratorios de robótica de todo el mundo ya están demostrando lo que es posible cuando el código abierto pasa al primer plano. Ahora es tu turno.
Si eres desarrollador, investigador o alguien que cree en romper barreras en lugar de sortearlas, este es tu momento. ALOHA 2 es una invitación. Echa un vistazo al código en GitHub. Explora los modelos de MuJoCo. Consigue el hardware. Experimenta con él. Llévalo más lejos. Forma parte del futuro en el que la robótica pertenece a todos.
Inicia sesión para dejar un comentario.