Die Zukunft der Robotik mit Open-Source-Hardware gestalten
 2883
2883
Wir stehen an der Schwelle zu einer Open-Source-Hardware-Revolution, und wer aufmerksam ist, spürt das bereits. Der jüngste Hype um DeepSeek und OpenAI dreht sich nicht nur um KI-Modelle – er ist Symptom eines weit größeren Umbruchs. Das Ethos der offenen Technologie dringt in jede Schicht der Technik vor, und die Robotik ist als Nächstes an der Reihe.
Yann LeCun, Vordenker im Bereich der offenen KI, predigt seit Jahren die Bedeutung offener Systeme, und er hat recht: Proprietäre Technik schafft Silos, offene Technik dagegen befeuert Innovation. Der „Linux-Moment“ der Software eröffnete eine Ära exponentieller Entwicklung, und nun steht die Robotik am selben Abgrund. Doch es gibt ein Problem: Während die Software in offenen Ökosystemen aufblühte, blieb die Hardware an proprietäre Ökosysteme, aufgeblähte Kosten und restriktiven Zugang gefesselt.
Warum die Hardware ihren „Linux-Moment“ braucht
Jahrzehntelang steckte die Robotik in einer Welt fest, in der Spitzentechnologie hinter verschlossenen Türen lag. Wer Präzisionsrobotik wollte, musste ein Vermögen für hochwertige Industriearme hinlegen. Wer mit Teleoperation experimentieren wollte, war gezwungen, in teuren, geschlossenen Systemen zu arbeiten, die Anpassung und Basteln im Keim erstickten. Es ist ein Ökosystem, das jedem außerhalb gut finanzierter Forschungslabore oder großer Konzerne den Fortschritt verleidet.
ALOHA 2 durchbricht dieses Paradigma. Das ist nicht nur ein weiteres Forschungsprojekt, sondern ein mutiger Schritt zur Demokratisierung der Robotik. Mit offenem Hardware-Design, modularen Komponenten und der Fähigkeit, teure proprietäre Systeme zu erreichen (oder sogar zu übertreffen), schafft ALOHA 2 eine Plattform, auf der Innovation nicht durch Bezahlschranken begrenzt wird. Sie gibt unabhängigen Entwicklern, Forschenden und Tüftlern die Werkzeuge, die Robotik voranzubringen – so wie Linux es für die Software tat.

Dieser Artikel ist für jene, die es verstehen – die Macher, die Hacker, die jene, die damit aufwuchsen, Dinge auseinanderzunehmen, nur um zu sehen, wie sie funktionieren. Wir steigen tief in die Probleme der traditionellen Teleoperation ein, in die Durchbrüche, die ALOHA 2 bringt, und darin, wie offene Hardware das Fundament für die Zukunft der Robotik legt. Wenn Sie je davon geträumt haben, Ihr eigenes Präzisionsrobotersystem zusammenzubauen, dann beginnt es hier.
Die Kostenbarriere in der Teleoperation
Jahrzehntelang blieb die Robotikbranche hinter unerschwinglichen Kosten verschlossen. Teleoperationssysteme in Industriequalität tragen oft Preisschilder von über 100.000 $, getrieben durch den Bedarf an hochpräzisen Aktoren, proprietären Steuerungssystemen und umfangreichen Kalibrierungsanforderungen.
Wenn Hersteller von Teleoperation „in Industriequalität“ sprechen, meinen sie in Wahrheit ein komplexes Geflecht voneinander abhängiger proprietärer Systeme. Ein einfacher Roboterarm mit Teleoperationsfähigkeiten beginnt bei 50.000–80.000 $, aber das ist erst der Anfang. Rechnet man die obligatorischen Kraftrückkopplungssysteme (20.000 $+), jährliche Software-Lizenzgebühren (10.000–15.000 $) und spezialisierte Kalibrierungsausrüstung hinzu, liegt man weit über 100.000 $, noch bevor eine einzige Zeile Code geschrieben ist. Doch die versteckten Kosten reichen noch tiefer. Die meisten Systeme verlangen spezielle Schulungsprogramme (5.000 $ pro Bediener), regelmäßige Neukalibrierung durch Werkstechniker (2.000–3.000 $ pro Besuch) und Wartungsverträge, die sich jährlich auf Zehntausende belaufen können. Das ist nicht nur teuer – es ist ein Geschäftsmodell, das darauf ausgelegt ist, Nutzer selbst für grundlegende Änderungen von den Anbietern abhängig zu halten.
Selbst Forschungsaufbauten, die häufig Roboterarme der Mittelklasse nutzen, kosten Zehntausende Dollar – und das beschränkt den Zugang auf gut finanzierte Institutionen und Konzerne. Diese finanzielle Barriere erstickt Innovation und macht die Robotik zu einer exklusiven Domäne.
Die Grenzen des traditionellen Mappings im Aufgabenraum
Die hohen Kosten wären vielleicht zu rechtfertigen, wenn die traditionellen Systeme fehlerfreie Leistung lieferten. Stattdessen beruhen sie auf einem grundlegend fehlerhaften Ansatz: dem Mapping im Aufgabenraum. Diese Methode versucht, menschliche Handbewegungen direkt in Positionen des Roboter-Endeffektors zu übersetzen, was intuitiv erscheint, in der Praxis jedoch eine Kaskade von Problemen erzeugt.
Das erste Problem ist die Latenz
Die meisten kommerziellen Systeme arbeiten mit einer Steuerfrequenz von nur 5–10 Hz und führen so eine Verzögerung von 100–200 ms zwischen der Eingabe des Bedieners und der Reaktion des Roboters ein. Um zu verstehen, warum das wichtig ist, probieren Sie dieses Experiment: Beobachten Sie Ihre Handbewegungen in einem Videoanruf mit 200 ms Verzögerung. Selbst einfache Aufgaben werden zur reinen Frustration. Stellen Sie sich nun vor, Sie wollten mit derselben Verzögerung eine Nadel einfädeln oder empfindliche Objekte handhaben.
Das zweite Problem ist noch heimtückischer: kinematische Singularitäten
Wenn ein Roboterarm sich bestimmten Konfigurationen nähert (etwa der vollen Streckung), versagen die traditionellen Algorithmen der inversen Kinematik auf spektakuläre Weise. Das System friert entweder ein oder führt unvorhersehbare Bewegungen aus. Erfahrene Bediener lernen, diese „Gefahrenzonen“ zu meiden, doch das bedeutet, dass sie ständig gegen das System ankämpfen, anstatt sich auf die eigentliche Aufgabe zu konzentrieren.
Am schädlichsten ist vielleicht die körperliche Belastung der Bediener
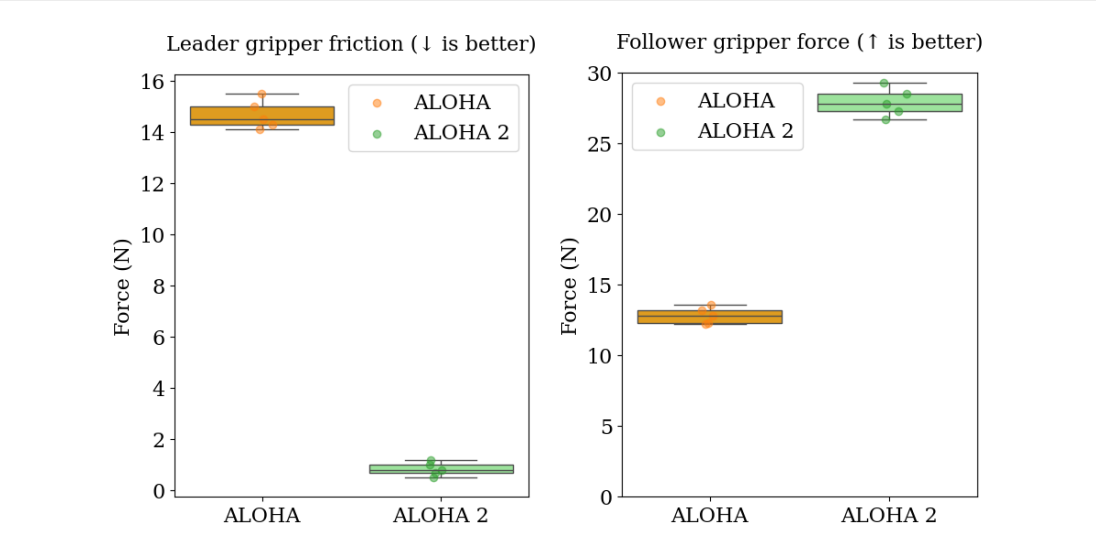
Traditionelle Leader-Greifer erfordern erheblichen Kraftaufwand und überschreiten oft 14,68 Newton (N), was bei längeren Sitzungen rasch ermüdet. Das entspricht dem Halten eines Pinzettengriffs an einem Gewicht von 1,5 kg. Über eine Acht-Stunden-Schicht hinweg führt das zu starker Ermüdung des Bedieners und verringert die Präzision genau dann, wenn sie am dringendsten gebraucht wird.
Abhängigkeit von proprietären Systemen
Um diese Einschränkungen auszugleichen, setzen die Hersteller auf proprietäre, kostspielige Lösungen. Fortschrittliche Roboterarme mit eingebauten Präzisionssteuerungsmechanismen verbessern die Leistung erheblich, aber zu einem enormen Preis. Zudem sind diese Systeme oft hinter geschlossenen Software-Ökosystemen verriegelt, was die Anpassung einschränkt und die Zugänglichkeit auf jene begrenzt, die sich teure Lizenzgebühren leisten können.
Ausbruch in die Freiheit: die Gelenkraum-Revolution von ALOHA 2
Das grundlegende Problem der Teleoperation liegt nicht nur in den Kosten – es geht auch um die Steuerung. Traditionelle Systeme versuchen, menschliche Bewegungen direkt auf die Endeffektoren des Roboters abzubilden, ein Ansatz, der intuitiv erscheint, aber grundlegend verkennt, wie Menschen komplexe Bewegungen auf natürliche Weise steuern. ALOHA 2 geht einen radikal anderen Weg und setzt auf das Gelenkraum-Mapping, und die Ergebnisse sind umwälzend. Ist die traditionelle Teleoperation ein Kartenhaus aus veralteten Steuermethoden und Anbieterbindung, so ist ALOHA 2 die Abrissbirne.
Was Gelenkraum-Mapping bedeutet
Denken Sie daran, wie Sie nach einer Tasse greifen. Sie berechnen nicht bewusst die genaue Position Ihrer Hand im 3D-Raum – Ihr Gehirn koordiniert die Bewegung von Schulter-, Ellbogen- und Handgelenk auf natürliche Weise. Genau so arbeitet ALOHA 2. Sie bildet die Gelenkwinkel des Leader-Roboters in Echtzeit auf die Gelenke des Follower-Roboters ab. Das ermöglicht eine flüssigere, vorhersehbarere Steuerung, beseitigt die unregelmäßige Bewegungsskalierung und erreicht höhere Präzision bei geringerem Kraftaufwand des Bedieners.
Diese scheinbar einfache Verschiebung des Ansatzes führt kaskadenartig zu dramatischen Verbesserungen in jedem Aspekt der Teleoperation.
Steuerfrequenz: von der Verzögerung zum Fluss
Die meisten kommerziellen Teleoperationssysteme laufen mit einer trägen Steuerfrequenz von 5–10 Hz und führen eine Verzögerung von 100–200 ms zwischen Eingabe und Ausführung ein. ALOHA 2 arbeitet mit klaren 50 Hz. Das ist kein bloßes Zahlenspiel – es ist der Unterschied zwischen dem Kampf gegen das System und dem Gefühl einer natürlichen Erweiterung der eigenen Bewegungen. Bei 50 Hz läuft die Steuerschleife alle 20 Millisekunden, schnell genug, dass Bediener berichten, der Roboter fühle sich wie eine direkte Verlängerung ihrer Arme an und nicht wie ein entferntes Werkzeug, das sie zu steuern versuchen.
Drastische Kraftreduktion & natürliche Leader-Follower-Steuerung
Traditionelle Systeme erfordern quälende 14,68 N Kraft allein für den Betrieb der Greifer – stellen Sie sich vor, Sie wollten präzise Kontrolle bewahren, während Sie ständig eine starke Feder zusammendrücken. ALOHA 2 senkt das auf nur 0,84 N.
| Merkmal | ALOHA 2 | Traditionelle Systeme |
|---|---|---|
| Steuerfrequenz | 50Hz | 5 – 10Hz |
| Latenz | < 20ms | 100 – 200ms |
| Kraft des Leader-Greifers | 0.84N | 14.68N |
| Schließkraft des Followers | 27.9N | 12.8N |
| Kosten | Bruchteil der traditionellen Systeme | $100k+ |
Bediener können länger und präziser arbeiten, ohne unter Handermüdung zu leiden. Das Leader-Follower-System sorgt dafür, dass jede Bewegung des Bedieners natürlich und intuitiv vom Follower-Roboter gespiegelt wird, was ein organisches Teleoperationserlebnis bei minimaler kognitiver Belastung ermöglicht.
Das ist ein grundlegender Wandel in der Bedienbarkeit.
Submillimeter-Präzision für komplexe Aufgaben
Industrielle Teleoperation wird oft mit groben, ungenauen Bewegungen assoziiert, die ständige Korrekturen des Bedieners erfordern. Besonders bemerkenswert ist vielleicht, dass diese verbesserte Bedienbarkeit mit gesteigerter Präzision einhergeht. Die Greifer von ALOHA 2 liefern mehr als die doppelte Kraftpräzision traditioneller Systeme (27,9 N gegenüber 12,8 N) und ermöglichen feinfühlige Manipulationsaufgaben, die zuvor ohne extrem teure Hardware unmöglich waren.
Steuerungsarchitektur & Software-Stack
Das Kernsteuerungssystem von ALOHA 2 baut auf ROS2 (Robot Operating System 2) auf und sorgt so für Modularität, Echtzeitleistung und nahtlose Integration in Pipelines für das Roboterlernen. Anders als traditionelle Teleoperationsaufbauten, die hardwarenahe CAN-Programmierung erfordern, vereinfacht ALOHA 2 die Software-Komplexität durch Interbotix, eine Python-basierte Steuerbibliothek, die die Entwicklungszeit um Hunderte Codezeilen reduziert.
Schlüsselkomponenten des Software-Stacks von ALOHA 2:
- ROS2-Middleware: regelt die Echtzeitkommunikation zwischen Leader- und Follower-Armen.
- PID- & Impedanzregelung: sorgt für eine flüssige und adaptive Teleoperation.
- Vorinstallierte Machine-Learning-Umgebung: kommt mit Ubuntu, ROS2 und Interbotix für die sofortige Inbetriebnahme.
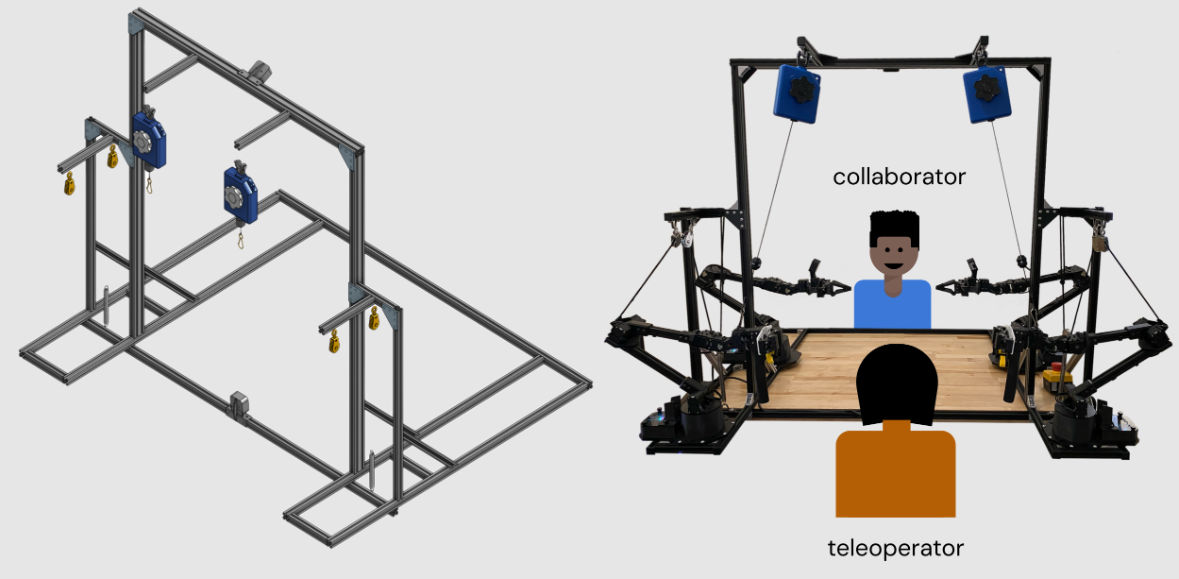
- Schwerkraftkompensationsmodul: verringert die Belastung des Bedieners mithilfe passiver Rückzugsmechanismen.
Die Technik, die das alles möglich macht
Leistung ist großartig – doch haben Sie je darüber nachgedacht, neu zu durchdenken, wie Robotersysteme überhaupt gebaut werden sollten? Während traditionelle Hersteller auf Kontrolle und Bindung hin optimieren, optimiert ALOHA 2 auf etwas Wertvolleres: die Freiheit zu innovieren.
Philosophie des modularen Designs
Möchten Sie mit einem neuen Greiferdesign experimentieren? Sie können es mithilfe der mitgelieferten CAD-Dateien im 3D-Druck herstellen. Müssen Sie das Steuerungssystem anpassen? Die Software ist quelloffen und gut dokumentiert. Das ist eines der prägendsten Merkmale von ALOHA 2: ihre modulare Architektur. Statt an ein monolithisches System gebunden zu sein, in dem eine einzige fehlerhafte Komponente die ganze Einheit unbrauchbar machen kann, setzt ALOHA 2 auf Modularität in jeder Ebene. Von den Greifern bis zu den Aktoren ist jedes Teilsystem so ausgelegt, dass es sich leicht ersetzen, aufrüsten oder verändern lässt.
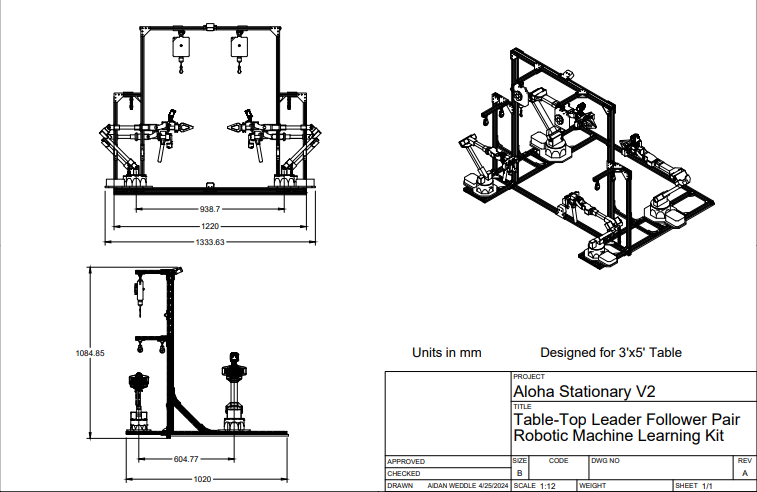
| Komponente | Spezifikation |
|---|---|
| Leader-Arme | WidowX 250 S – ALOHA Version |
| Follower-Arme | ViperX 300 S – ALOHA Version |
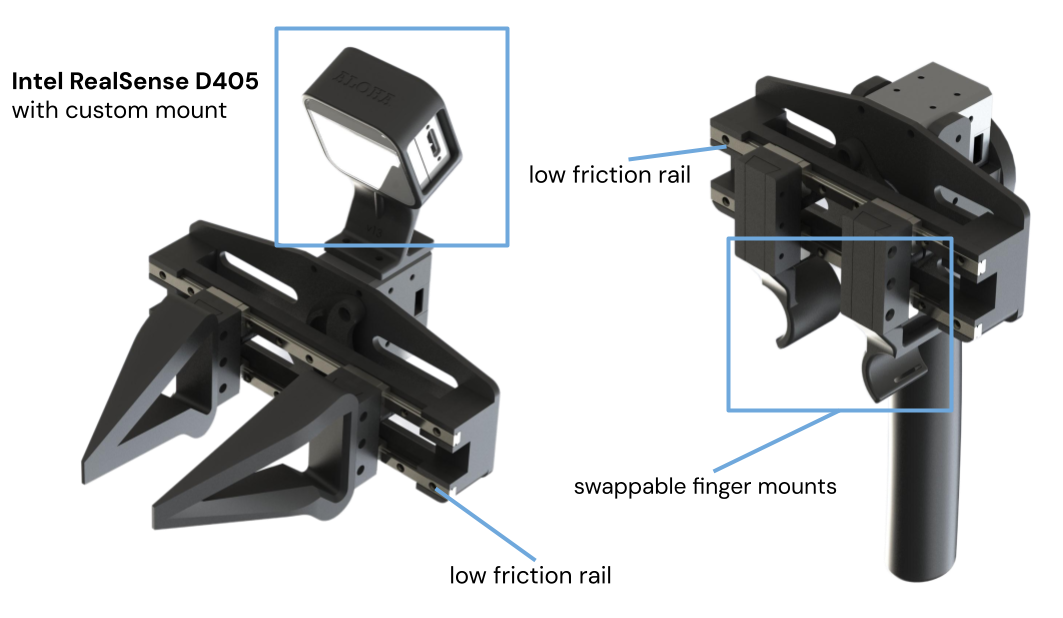
| Kameras | 4x Intel RealSense D405 |
| Chassis | Modular, Aluminiumprofil |
| Computer | Leistungsstarker Laptop (vorinstalliert mit Ubuntu, ROS2, Interbotix) |
Strategischer Einsatz von Standardkomponenten
Robotikhersteller haben uns die Geschichte verkauft, Präzision erfordere proprietäre Teile und geschlossene Systeme. ALOHA 2 kehrt dieses Modell um, indem sie überall, wo es möglich ist, strategisch Standardkomponenten einsetzt. Durch die Verwendung von Standard-Dynamixel-Motoren und Komponenten von der Stange erreicht sie Submillimeter-Präzision und hält dabei jedes Teil wart- und austauschbar. Fällt ein traditioneller Industriearm aus, erwarten Sie wochenlange Ausfallzeiten, während Sie auf den Werksservice warten. Braucht eine ALOHA-2-Komponente Aufmerksamkeit, reparieren Sie sie mit Teilen von jedem ordentlichen Hardware-Lieferanten.
Der Vorteil der Reparierbarkeit
Anders als proprietäre Industrieroboter, die selbst für kleinere Reparaturen Spezialtechniker erfordern, ist ALOHA 2 dafür gebaut, von ihren Nutzern repariert zu werden. Bricht ein Greifer, nutzt sich ein Gelenk ab oder lockert sich eine Kamerahalterung, müssen Nutzer sie nicht an den Hersteller zurückschicken oder auf teure Ersatzteile warten. Dank ihres offenen Designs und der Verwendung weithin verfügbarer Materialien lässt sich ALOHA 2 mit im 3D-Druck gefertigten Teilen, gewöhnlichen Befestigungselementen und Komponenten aus der örtlichen Werkstatt reparieren. Stellen Sie sich zum Beispiel vor, sechs Wochen auf einen Werkstechniker zu warten, gegenüber dem Reparieren eines ALOHA-2-Greifers in wenigen Stunden. Diese Reparierbarkeit dient nicht nur der Kostenersparnis – sie dient der Langlebigkeit.
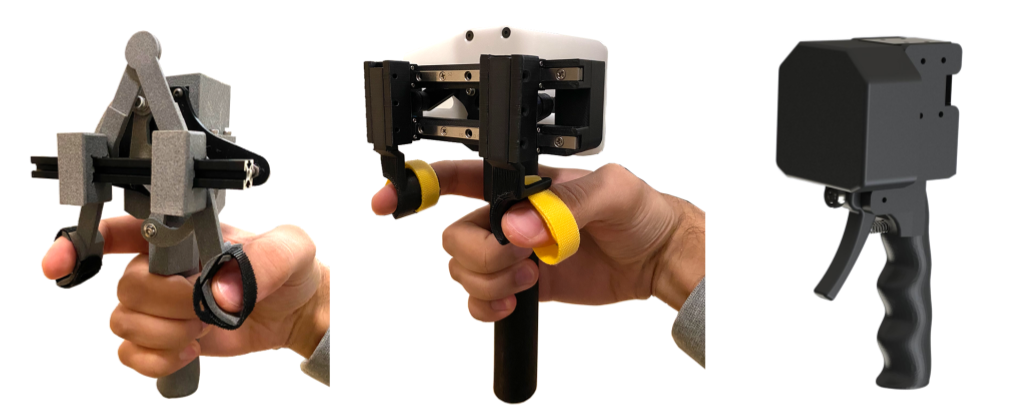
Clevere Designentscheidungen (etwa durchsichtige Greifer)
Die Technik von ALOHA 2 steckt voller kleiner, aber entscheidender Optimierungen, die die Bedienbarkeit verbessern. Ein herausragendes Beispiel sind die durchsichtigen Greifer. Anders als traditionelle undurchsichtige Greifer erlaubt das transparente Fingerdesign von ALOHA 2 den Bedienern, die Greifpräzision visuell zu bestätigen, während sie heikle Aufgaben ausführen. Dieses kleine, aber bedeutsame Merkmal verbessert die Mensch-Roboter-Interaktion und macht feine Manipulationsaufgaben weitaus intuitiver. In der traditionellen Robotik würde man das als bloße Ästhetik abtun.
Weitere clevere Designverbesserungen sind:
- Reibungsarme schienenbasierte Greifer, die die Ermüdung des Bedieners drastisch verringern.
- Passive Schwerkraftkompensation, die die Belastung während der Teleoperation verringert.
- Austauschbare Fingerhalterungen für verschiedene aufgabenspezifische Anpassungen.
Jede Entscheidung im Design von ALOHA 2 dient einem Zweck – die Leistung zu steigern und die Robotik zugänglicher, reparierbarer und besser anpassbar zu machen.
Lernen durch Vorführung
Roboter sollten so lernen wie Menschen – nicht durch endlose Codezeilen, sondern durch Beobachten und Nachahmen. Wie programmiert man einen Roboter, seine Greifkraft an verschiedene Objekte anzupassen? Wie codiert man die feinen Korrekturen, die nötig sind, um eine Nadel einzufädeln?
Sie wollen, dass ein Roboter ein Objekt aufnimmt? Sie definieren präzise Greifpunkte, Bewegungsbahnen und Kraftparameter – von Hand. Sie wollen, dass er sich an verschiedene Objekte anpasst? Das ist eine weitere Runde des Parametertunings, der Datenkennzeichnung und der Fehlersuche. Denken Sie daran, wie Menschen komplexe körperliche Aufgaben erlernen. Ein Meister seines Fachs lehrt seinen Lehrling nicht, indem er mathematische Gleichungen von Kraft und Bewegung aufschreibt – er führt es vor. Der Lehrling schaut zu, ahmt nach und entwickelt nach und nach ein intuitives Verständnis der Aufgabe.
ALOHA 2 beseitigt diesen Engpass. Statt für jede Handlung Code zu schreiben, können Nutzer dem System Aufgaben durch physisches Vorführen beibringen. Dieser Ansatz verringert den Bedarf an hardwarenaher Programmierung drastisch und macht das Roboterlernen intuitiver und zugänglicher – für Nicht-Programmierer ebenso wie für Forschende und Ingenieure.
Die Wissenschaft hinter dem Lernen durch Vorführung
Im Kern folgt das Lernsystem von ALOHA 2 einem starken Prinzip:
- Das Leader-Follower-Teleoperationssystem zeichnet menschliche Vorführungen in Echtzeit auf.
- Die gesammelten Daten werden zu Steuerungsstrategien verarbeitet, aus denen der Roboter verallgemeinern kann.
- ALOHA 2 wiederholt, verfeinert und verbessert ihre Leistung über wiederholte Versuche hinweg.
Jede Vorführung erzeugt Tausende von Datenpunkten, die nicht nur zeigen, was Menschen tun, sondern auch, wie sie es tun. Wenn ein Bediener das Einfädeln einer Nadel vorführt, zeichnet das System auf:
- Präzise Gelenkpositionen und -geschwindigkeiten
- Kraftanpassungen bei heiklen Manipulationen
- Visuelles Feedback aus mehreren Kamerawinkeln
- Zeitliche Zusammenhänge zwischen den Bewegungen
Diese Daten werden zum Trainingsmaterial für Machine-Learning-Algorithmen, die aus menschlicher Expertise Muster und Strategien herauslesen können. Im Kern beobachtet und lernt ALOHA 2, statt fest zu codieren, wie man ein T-Shirt faltet, einen Knoten bindet oder empfindliche Objekte handhabt, und verfeinert ihre Fähigkeiten dynamisch, was sie weitaus vielseitiger macht als traditionelle programmierbasierte Ansätze.
Roboterlernen mit hochwertigen Daten skalieren
Der Schlüssel zu jedem guten Machine-Learning-Modell sind Daten, und ALOHA 2 ist auf die großangelegte Datenerfassung in einem beispiellosen Umfang ausgelegt. Ausgestattet mit Intel-RealSense-D405-Kameras über Kopf und am Handgelenk erfasst das System visuelle Eingaben aus mehreren Winkeln zusammen mit hochfrequenten Bewegungsdaten und kann so mit einem beispiellosen Maß an Präzision lernen.
- 50-Hz-Bewegungsaufzeichnung – erfasst feingranulare Daten zu Gelenkposition und -geschwindigkeit
- RGB-D-Bilddaten – liefern eine tiefenbewusste Wahrnehmung für komplexe Manipulationsaufgaben
- Vielfältige Vorführungssammlung – Tausende aufgezeichnete Vorführungen ermöglichen eine bessere Verallgemeinerung über verschiedene Aufgaben hinweg
- Dieser gewaltige Datensatz dient als Treibstoff für KI-gestützte Robotik und ermöglicht besseres Imitationslernen, bestärkendes Lernen und Strategieoptimierung.
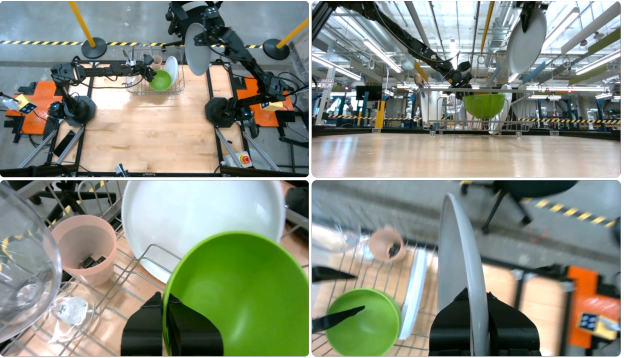
Quelle: Das Paper An Enhanced Low-Cost Hardware
for Bimanual Teleoperation
Skalierbares Roboterlernen mit MuJoCo
Die Integration von ALOHA 2 mit MuJoCo (Multi-Joint Dynamics with Contact) ist die Brücke zwischen menschlicher Vorführung und skalierbarem Roboterlernen. Die Physik-Engine bietet eine hochgenaue, kostengünstige Umgebung zum Testen und Verfeinern von Roboterverhalten, bevor es in der realen Welt zum Einsatz kommt.
MuJoCo ermöglicht es Forschenden:
- Steuerungsstrategien in Mikrosekunden statt Minuten zu testen und so die Entwicklungszyklen zu beschleunigen
- Grenzfälle zu erkunden, die für echte Hardware zu gefährlich wären, und so kostspielige Ausfälle zu verringern
- Synthetische Trainingsdaten zu erzeugen, indem die Parameter erfolgreicher Vorführungen variiert werden, und so die Vielfalt des Datensatzes zu erweitern
- Erlerntes Verhalten unter verschiedenen Umgebungsbedingungen zu validieren und so die Anpassungsfähigkeit in der realen Welt zu verbessern
Am wichtigsten ist, dass die präzise Systemidentifikation von ALOHA 2 einen nahtlosen Sim-to-Real-Transfer gewährleistet.
In MuJoCo verfeinerte Strategien lassen sich direkt auf den physischen Roboter übertragen und beseitigen die „Sim-to-Real-Lücke“, die die Robotik seit Jahrzehnten plagt. Das stellt sicher, dass in der Simulation entwickeltes Verhalten auch bei der Ausführung in der realen Welt zuverlässig bleibt – ohne endloses Tuning nach dem Prinzip von Versuch und Irrtum.
Mit realen Vorführungen, großangelegter Datenerfassung und hochpräziser Simulation gestaltet ALOHA 2 die Zukunft eines adaptiven, skalierbaren und für den Menschen intuitiven Roboterlernens.
Die Zukunft der Robotik ist offen
Jahrzehntelang war die Robotik hinter exorbitanten Kosten, anbietergesteuerten Ökosystemen und starren Architekturen verriegelt, die Innovation ersticken. ALOHA 2 ist der Beweis, dass wir diesen Status quo nicht hinnehmen müssen. Sie ist nicht nur ein erschwinglicheres Robotersystem – sie ist eine grundlegend andere Vision davon, wie Robotik gebaut, geteilt und weiterentwickelt werden sollte.
Traditionelle Industrieroboter sind Blackboxes, konstruiert, um exklusiv, teuer und unflexibel zu sein. ALOHA 2 stellt dieses Modell auf den Kopf. Alles ist offen – von den CAD-Dateien bis zu den Steuerungsalgorithmen – und gibt Entwicklern, Forschenden und Ingenieuren die Freiheit, zu tüfteln, zu iterieren und auf bestehender Arbeit aufzubauen. Kein Warten mehr auf Updates der Hersteller. Keine Bindung mehr an proprietäre Hardware. Wenn Sie etwas verändern wollen, können Sie es. Wenn Sie etwas verbessern wollen, werden Sie es tun.
Das ist der Linux-Moment der Robotik – der Punkt, an dem eine Open-Source-Plattform mächtig genug wird, um mit proprietären Systemen zu konkurrieren, und zugleich zugänglich genug bleibt, um eine ganze Branche zu demokratisieren. ALOHA 2 liefert Submillimeter-Präzision, mühelose Teleoperation und großangelegtes Roboterlernen – und das alles zu einem Bruchteil der Kosten traditioneller Systeme. Sie übertrifft ihre Konkurrenten nicht, weil sie hinter Unternehmensgeheimnissen verriegelt ist, sondern weil sie offen ist für die Zusammenarbeit mit den klügsten Köpfen der Robotik. So sieht echte Innovation aus – keine künstlichen Barrieren, keine Bezahlschranken, nur ein wachsendes Ökosystem von Machern, die die Robotik voranbringen. DeepMind, Stanford und Robotiklabore weltweit beweisen bereits, was möglich ist, wenn Open Source in den Mittelpunkt rückt. Jetzt sind Sie an der Reihe.
Wenn Sie Entwickler, Forschende oder jemand sind, der daran glaubt, Barrieren einzureißen, statt sie zu umgehen, dann ist dies Ihr Moment. ALOHA 2 ist eine Einladung. Sehen Sie sich den Code auf GitHub an. Erkunden Sie die MuJoCo-Modelle. Besorgen Sie sich die Hardware. Experimentieren Sie damit. Treiben Sie sie weiter. Werden Sie Teil der Zukunft, in der die Robotik allen gehört.
Melde dich an, um einen Kommentar zu hinterlassen.