オープンソースハードウェアでロボティクスの未来を築く
 2883
2883
私たちはオープンソースハードウェア革命の入り口に立っています。注意深く観察してきた人なら、それを肌で感じているはずです。DeepSeek や OpenAI をめぐる最近の熱狂は、単に AI モデルの話ではなく、はるかに大きな転換の兆候です。オープンな技術の精神はエンジニアリングのあらゆる層に浸透しつつあり、次はロボティクスの番です。
オープンソース AI 分野の思想的リーダーである Yann LeCun は、長年にわたってオープンソースシステムの重要性を説いてきました。彼は正しい。専用技術はサイロを生み出しますが、オープンソース技術はイノベーションの燃料になります。ソフトウェアにおける「Linux の瞬間」は指数関数的な発展の時代を切り開きました。そして今、ロボティクスは同じ崖っぷちに立っています。しかし問題があります。ソフトウェアがオープンなエコシステムで花開いた一方で、ハードウェアは専用エコシステム、膨れ上がったコスト、制限的なアクセスに縛られたままなのです。
なぜハードウェアには「Linux の瞬間」が必要なのか
何十年もの間、ロボティクスは最先端技術が閉ざされた扉の向こうに閉じ込められた世界に縛られてきました。精密なロボティクスが欲しければ、ハイエンドの産業用アームに大金を払わなければなりませんでした。テレオペレーションを試したければ、カスタマイズや創意工夫を阻む高価でクローズドなシステムの中で作業せざるを得ませんでした。それは、潤沢な資金を持つ研究所や巨大企業以外のすべての人にとって、進歩を妨げるエコシステムです。
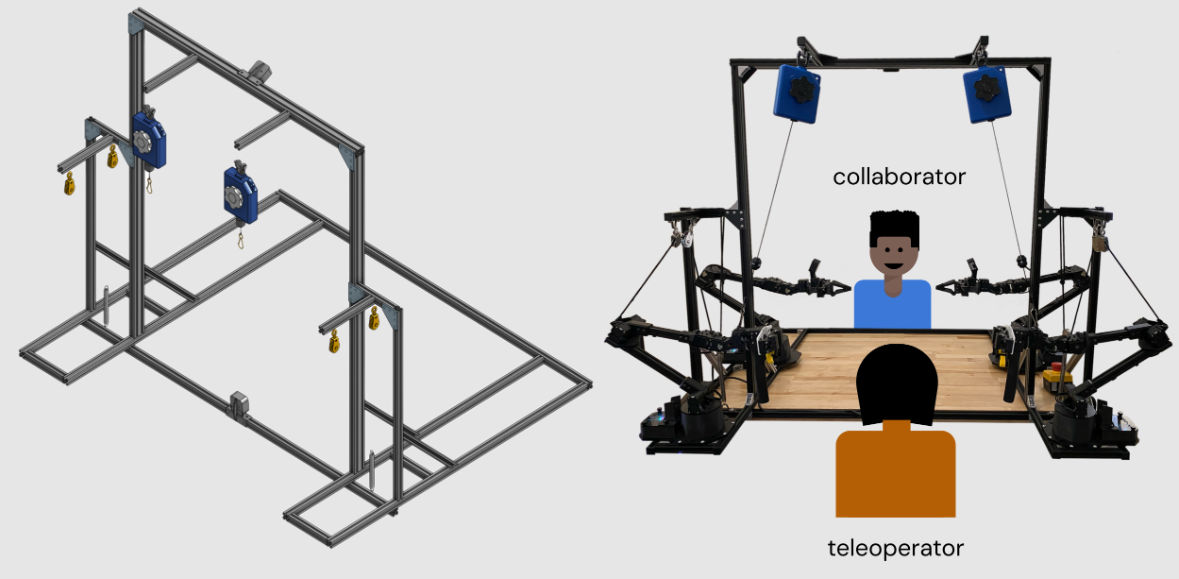
ALOHA 2 はそのパラダイムを覆します。これは単なるもう一つの研究プロジェクトではなく、ロボティクスを民主化するための大胆な一歩です。オープンなハードウェア設計、モジュール式コンポーネント、そして高価な専用システムに匹敵する(あるいは凌駕する)能力により、ALOHA 2 はイノベーションが有料の壁に阻まれないプラットフォームを生み出しています。Linux がソフトウェアにもたらしたように、独立した開発者・研究者・愛好家にロボティクスを前進させる手段を与えているのです。

この記事は、それを理解している人々のためのものです。作り手、ハッカー、そして仕組みを知りたいだけで物を分解しながら育った人々のためのものです。従来のテレオペレーションが抱える問題、ALOHA 2 がもたらすブレークスルー、そしてオープンなハードウェアがロボティクスの未来の基盤をどう築いているのかを深く掘り下げます。自分だけの精密ロボットシステムを自作する夢を見たことがあるなら、すべてはここから始まります。
テレオペレーションにおけるコストの壁
何十年もの間、ロボティクス業界は法外なコストの壁に閉ざされたままでした。産業グレードのテレオペレーションシステムは、高精度アクチュエーター、専用の制御システム、そして大がかりなキャリブレーション要件のために、しばしば $100,000 を超える価格が付けられています。
メーカーが「産業グレード」のテレオペレーションについて語るとき、実際には相互依存する専用システムの複雑な網の話をしています。テレオペレーション機能を備えた基本的なロボットアームは $50K〜80K から始まりますが、それはほんの始まりにすぎません。必須の力覚フィードバックシステム($20K 以上)、年間のソフトウェアライセンス料($10K〜15K)、専用のキャリブレーション機器を加えれば、一行のコードを書く前にすでに $100K をはるかに超えます。しかし、隠れたコストはさらに根深いものです。ほとんどのシステムは専用のトレーニングプログラム(オペレーター 1 人あたり $5K)、工場技術者による定期的な再キャリブレーション(1 回の訪問あたり $2K〜3K)、そして年間で数万ドルに達しかねない保守契約を必要とします。これは単に高価なだけではなく、基本的な改造にさえユーザーをベンダーに依存させ続けるよう設計されたビジネスモデルなのです。
中級クラスのロボットアームをよく用いる研究用の構成でさえ、数万ドルの費用がかかります。そしてこれが、アクセスを潤沢な資金を持つ機関や企業に限定してしまいます。この金銭的な壁はイノベーションを阻害し、ロボティクスを閉ざされた領域にしてしまうのです。
従来のタスク空間マッピングの限界
従来のシステムが完璧な性能を発揮するのであれば、その高コストも正当化できるかもしれません。ところが実際には、それらは根本的に欠陥のあるアプローチ、すなわちタスク空間マッピングの上に成り立っています。この手法は人間の手の動きをロボットのエンドエフェクターの位置へ直接変換しようとするもので、一見直感的に思えますが、実際には連鎖的な問題を引き起こします。
最初の問題はレイテンシです
ほとんどの商用システムはわずか 5〜10Hz の制御周波数で動作しており、オペレーターの入力とロボットの応答との間に 100〜200ms の遅延を生じます。なぜこれが重要なのかを理解するには、こんな実験を試してみてください。200ms の遅延があるビデオ通話で自分の手の動きを見るのです。単純な作業ですらいらだたしいものになります。では、同じ遅延で針に糸を通したり、繊細な物体を扱おうとしたりする様子を想像してみてください。
二つ目の問題はさらに厄介です。運動学的特異点です
ロボットアームが特定の姿勢(完全伸展など)に近づくと、従来の逆運動学アルゴリズムは見事なまでに破綻します。システムはフリーズするか、予測不能な動きをします。熟練したオペレーターはこうした「危険ゾーン」を避けることを学びますが、それは本来の作業に集中する代わりに、常にシステムと格闘していることを意味します。
おそらく最も深刻なのは、オペレーターへの身体的な負担です
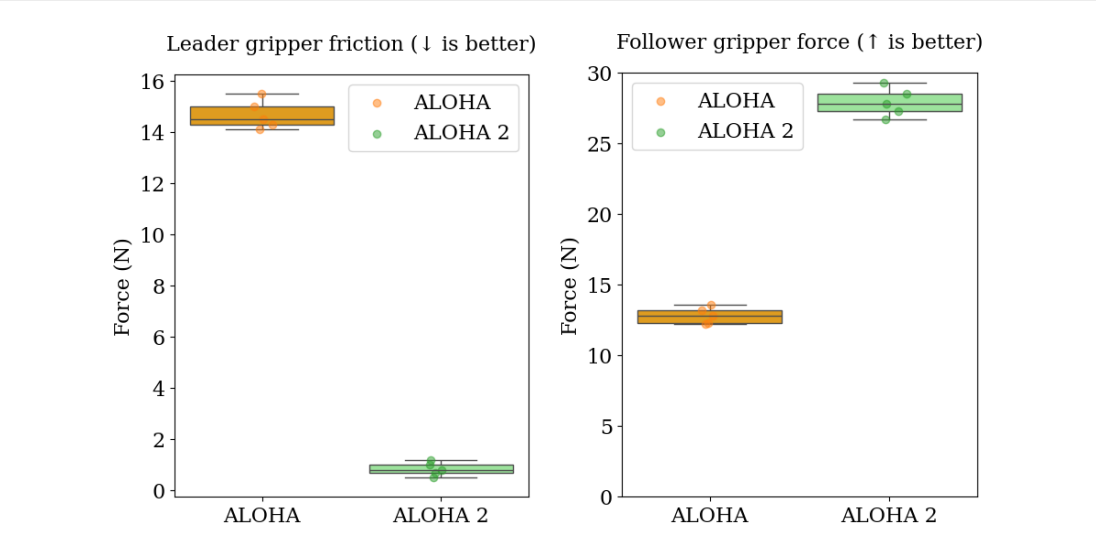
従来のリーダー側グリッパーは操作にかなりの力を必要とし、しばしば 14.68 ニュートン(N)を超えるため、長時間のセッションでは急速な疲労を招きます。これは 1.5kg の重りをつまんで保持し続けるのに相当します。8 時間のシフトを通じて、これはオペレーターの深刻な疲労につながり、まさに精度が最も必要とされるときに精度を低下させてしまいます。
専用システムへの依存
こうした限界を補うために、メーカーは専用で高コストなソリューションに頼ります。精密制御機構を組み込んだ高度なロボットアームは性能を大きく向上させますが、その代償は莫大です。さらに、こうしたシステムはしばしばクローズドなソフトウェアエコシステムに閉じ込められており、カスタマイズを制限し、高額なライセンス料を払える人々だけにアクセスを限定してしまいます。
解き放たれる:ALOHA 2 の関節空間革命
テレオペレーションの根本的な問題はコストだけではなく、制御にもあります。従来のシステムは人間の動きをロボットのエンドエフェクターへ直接マッピングしようとしますが、このアプローチは直感的に見えて、人間が複雑な動きを自然にどう制御しているのかを根本的に誤解しています。ALOHA 2 は関節空間マッピングに着目することで、まったく異なるアプローチを取り、その成果は変革的です。従来のテレオペレーションが時代遅れの制御手法とベンダーロックインの上に築かれた砂上の楼閣だとすれば、ALOHA 2 はそれを打ち壊す鉄球です。
関節空間マッピングを理解する
コップに手を伸ばすときのことを考えてみてください。あなたは 3D 空間における手の正確な位置を意識的に計算しているわけではありません。脳が肩、肘、手首の関節の動きを自然に協調させています。ALOHA 2 はまさにこのように動作します。リーダーロボットの関節角度をフォロワーロボットの関節へリアルタイムにマッピングするのです。これによって、より滑らかで予測可能な制御が実現し、不規則な動きのスケーリングが解消され、オペレーターのより少ない労力でより高い精度が可能になります。
この一見すると単純なアプローチの転換が、テレオペレーションのあらゆる側面にわたって劇的な改善へと波及していきます。
制御周波数:ラグから流れるような操作へ
ほとんどの商用テレオペレーションシステムはもたつく 5〜10Hz の制御周波数で動作し、入力と実行の間に 100〜200ms の遅延を生じます。ALOHA 2 はきびきびとした 50Hz で動作します。これは単なる数字の遊びではなく、システムと格闘するのか、それとも自分の動きの自然な延長のように感じられるのか、その違いです。50Hz では制御ループが 20 ミリ秒ごとに回り、オペレーターがロボットを「操作しようとする遠隔ツール」ではなく「自分の腕の直接的な延長」のように感じると報告するほど高速です。
大幅な力の削減とリーダー・フォロワーの自然な制御
従来のシステムは、グリッパーを操作するだけで 14.68N もの過酷な力を必要とします。重いばねを絶えず握りしめながら正確な制御を保とうとする様子を想像してみてください。ALOHA 2 はこれをわずか 0.84N にまで削減します。
| 特性 | ALOHA 2 | 従来のシステム |
|---|---|---|
| 制御周波数 | 50Hz | 5 – 10Hz |
| レイテンシ | < 20ms | 100 – 200ms |
| リーダー側グリッパーの力 | 0.84N | 14.68N |
| フォロワー側の閉じる力 | 27.9N | 12.8N |
| コスト | 従来システムのごく一部のコスト | $100k+ |
オペレーターは手の疲労に悩まされることなく、より長く、より高い精度で作業できます。リーダー・フォロワーシステムは、オペレーターのあらゆる動きをフォロワーロボットが自然かつ直感的に再現することを保証し、最小限の認知的負荷で有機的なテレオペレーション体験を可能にします。
これは使いやすさにおける根本的な転換です。
複雑なタスクのためのサブミリ精度
産業用テレオペレーションは、しばしば粗雑で不正確な動きを連想させ、オペレーターによる絶え間ない補正を必要とします。おそらく最も注目すべきは、この向上した使いやすさが精度の向上を伴っている点です。ALOHA 2 のグリッパーは従来のシステムの 2 倍を超える力の精度(27.9N 対 12.8N)を実現し、これまで極めて高価なハードウェアなしには不可能だった繊細な操作タスクを可能にします。
制御アーキテクチャとソフトウェアスタック
ALOHA 2 の中核となる制御システムは ROS2 (Robot Operating System 2) 上に構築されており、モジュール性、リアルタイム性能、そしてロボット学習パイプラインとのシームレスな統合を実現します。低レベルの CAN プログラミングを必要とする従来のテレオペレーション構成とは異なり、ALOHA 2 は Interbotix(数百行ものコードの開発時間を削減する Python ベースの制御ライブラリ)を通じてソフトウェアの複雑さを簡素化します。
ALOHA 2 のソフトウェアスタックの主要コンポーネント:
- ROS2 ミドルウェア:リーダーアームとフォロワーアームの間のリアルタイム通信を担います。
- PID 制御とインピーダンス制御:滑らかで適応的なテレオペレーションを保証します。
- プリインストール済みの機械学習環境:Ubuntu、ROS2、Interbotix が付属し、すぐに利用できる状態でデプロイできます。
- 重力補償モジュール:受動的な引き戻し機構を用いてオペレーターの負担を軽減します。
それを実現するエンジニアリング
性能は素晴らしい。しかし、そもそもロボットシステムをどう作るべきかを根本から見直すことを考えたことはあるでしょうか。従来のメーカーが管理とロックインのために最適化する一方で、ALOHA 2 はもっと価値あるもの、すなわちイノベーションの自由のために最適化します。
モジュール設計の思想
新しいグリッパー設計を試したいですか?付属の CAD ファイルを使って 3D プリントできます。制御システムを変更する必要がありますか?ソフトウェアはオープンソースで、十分に文書化されています。これは ALOHA 2 を最も特徴づける性質の一つ、すなわちモジュール式アーキテクチャです。一つの不具合のあるコンポーネントがユニット全体を使い物にならなくしてしまうモノリシックなシステムに縛られる代わりに、ALOHA 2 はあらゆるレベルでモジュール性を取り入れています。グリッパーからアクチュエーターまで、各サブシステムは簡単に交換、アップグレード、改造できるよう設計されています。
| コンポーネント | 仕様 |
|---|---|
| リーダーアーム | WidowX 250 S – ALOHA Version |
| フォロワーアーム | ViperX 300 S – ALOHA Version |
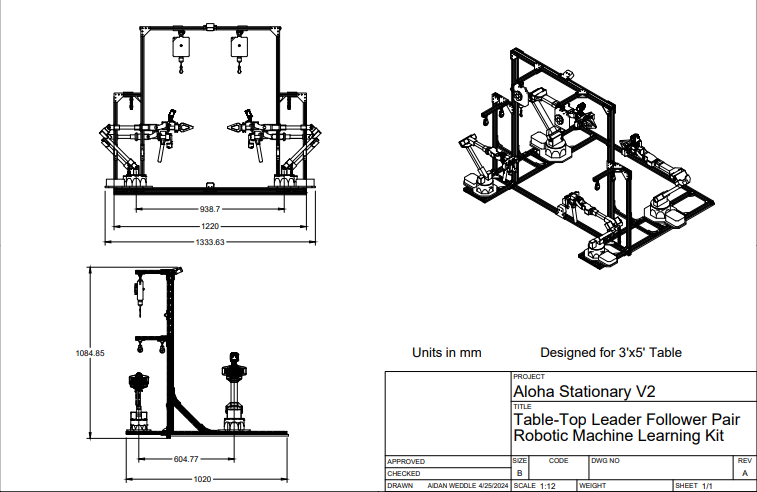
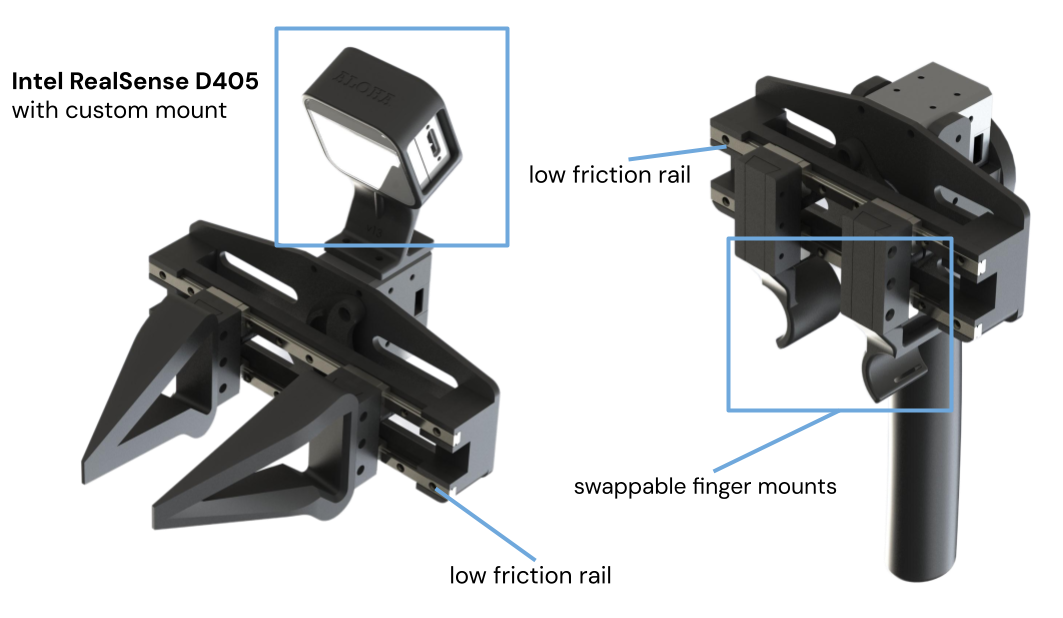
| カメラ | 4x Intel RealSense D405 |
| シャーシ | モジュール式、アルミ押出材 |
| コンピューター | 高性能ノートパソコン(Ubuntu、ROS2、Interbotix をプリインストール済み) |
標準部品の戦略的な活用
ロボティクスメーカーは、精度には専用部品とクローズドなシステムが必要だという物語を私たちに売り込んできました。ALOHA 2 は、可能な限り市販の既製部品を戦略的に取り入れることで、このモデルを覆します。標準的な Dynamixel モーターと既製部品を用いることで、すべての部品を整備・交換可能に保ちながらサブミリ精度を達成します。従来の産業用アームが故障すると、工場のサービスを待って何週間ものダウンタイムに直面します。一方、ALOHA 2 のコンポーネントが手当てを必要とするときは、まともなハードウェア供給業者ならどこでも手に入る部品で修理できます。
修理しやすさという利点
些細な修理にすら専門の技術者を必要とする専用の産業用ロボットとは異なり、ALOHA 2 はユーザー自身が修理できるよう作られています。グリッパーが壊れたり、関節がすり減ったり、カメラのマウントが緩んだりしても、ユーザーはメーカーへ送り返したり、高価な交換部品を待ったりする必要はありません。オープンな設計と広く入手できる材料の使用のおかげで、ALOHA 2 は3D プリント部品、汎用のファスナー、地元の機械工場の部品で修理できます。たとえば、工場の技術者を 6 週間待つのと、ALOHA 2 のグリッパーを数時間で直すのとを想像してみてください。この修理しやすさという特長は、単なるコスト削減のためだけでなく、長寿命のためのものです。
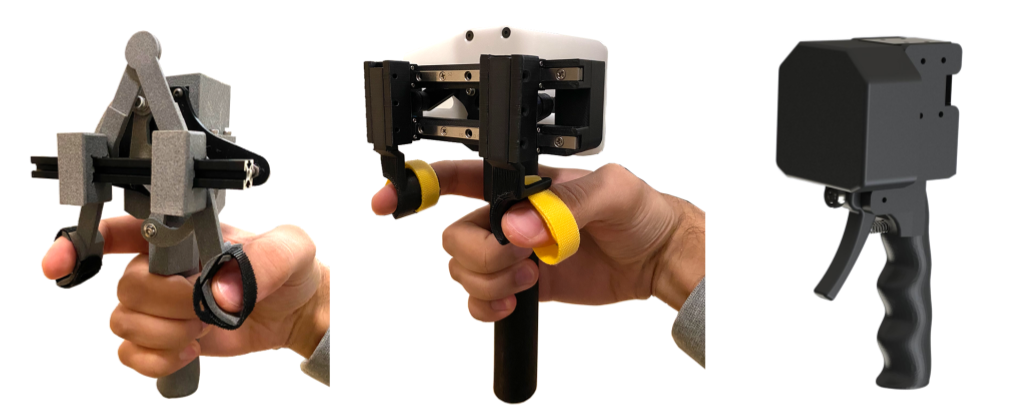
賢い設計上の選択(透けて見えるグリッパーなど)
ALOHA 2 のエンジニアリングは、使いやすさを高める小さくとも決定的な最適化に満ちています。際立った一例が透けて見えるグリッパーです。従来の不透明なグリッパーとは異なり、ALOHA 2 の透明なフィンガー設計は、繊細な作業中にオペレーターが把持の精度を視覚的に確認することを可能にします。この小さくとも重要な特長は、人とロボットの相互作用を向上させ、細かな操作タスクをはるかに直感的なものにします。従来のロボティクスでは、これは美観の問題として一蹴されていたでしょう。
その他の賢い設計上の改善には、次のようなものがあります:
- オペレーターの疲労を劇的に軽減する低摩擦のレール式グリッパー。
- テレオペレーション中の負担を軽減する受動的な重力補償。
- さまざまなタスク専用の適応に対応する交換可能なフィンガーマウント。
ALOHA 2 の設計におけるあらゆる選択には目的があります。性能を高め、ロボティクスをより利用しやすく、修理しやすく、自由に手を加えられるものにすることです。
実演からの学習
ロボットは人間と同じように、果てしないコードの行を通してではなく、観察し模倣することで学ぶべきです。さまざまな物体に合わせて把持力を調整するよう、どうやってロボットをプログラムするのでしょうか。針に糸を通すのに必要な微妙な調整を、どうやってコードに書くのでしょうか。
ロボットに物体を持ち上げさせたいですか?正確な把持点、動きの軌道、力のパラメーターを手作業で定義します。さまざまな物体に適応させたいですか?それはまた一巡りのパラメーター調整、データのラベル付け、そしてデバッグです。人間が複雑な身体的タスクをどう学ぶかを考えてみてください。熟練の職人は、力と運動の数式を書き留めて弟子に教えたりはしません。実演してみせるのです。弟子はそれを見て、真似て、少しずつそのタスクへの直感的な理解を育んでいきます。
ALOHA 2 はこのボトルネックを取り除きます。あらゆる動作のためにコードを書く代わりに、ユーザーはタスクを実際に実演することでシステムを教えることができます。このアプローチは低レベルのプログラミングの必要性を劇的に減らし、ロボット学習を、非プログラマー、研究者、エンジニアのいずれにとってもより直感的でアクセスしやすいものにします。
実演からの学習を支える科学
その根幹において、ALOHA 2 の学習システムは強力な原理に従っています:
- リーダー・フォロワー方式のテレオペレーションシステムが、人間の実演をリアルタイムで記録します。
- 収集されたデータは、ロボットが汎化できる制御方策へと処理されます。
- ALOHA 2 は繰り返しの試行を通じて、その性能を再生し、洗練し、向上させます。
各実演は、人間が何をするかだけでなく、どのようにそれを行うかを示す数千のデータポイントを生み出します。オペレーターが針に糸を通す実演をすると、システムは次のものを記録します:
- 正確な関節の位置と速度
- 繊細な操作中の力の調整
- 複数のカメラアングルからの視覚的フィードバック
- 動きの間の時間的な関係
このデータは、人間の専門知識からパターンや戦略を抽出できる機械学習アルゴリズムの学習材料になります。要するに、T シャツのたたみ方、結び目の結び方、繊細な物体の扱い方をハードコーディングする代わりに、ALOHA 2 は観察し、学習し、その技能を動的に洗練していきます。これにより、従来のプログラミングに基づくアプローチよりもはるかに汎用性が高くなるのです。
高品質なデータでロボット学習をスケールさせる
あらゆる優れた機械学習モデルの鍵はデータであり、ALOHA 2 は前例のない規模での大規模なデータ収集のために設計されています。頭上と手首に取り付けられた Intel RealSense D405 カメラを備えたこのシステムは、高頻度の動きのデータとともに多角度の視覚入力を捉え、前例のないレベルの精度で学習することを可能にします。
- 50Hz の動きのロギング — きめ細かな関節の位置と速度のデータを捉えます
- RGB-D の視覚データ — 複雑な操作タスクのために、深度を意識した知覚を提供します
- 多様な実演の収集 — 数千件の記録された実演が、さまざまなタスクにわたるより良い汎化を可能にします
- この膨大なデータセットは AI 駆動のロボティクスの燃料となり、より優れた模倣学習、強化学習、方策最適化を可能にします。
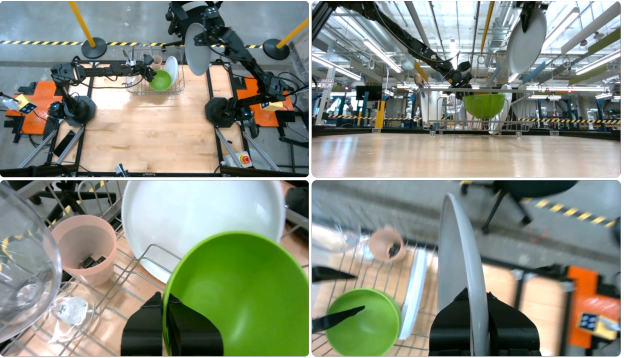
出典: 論文「An Enhanced Low-Cost Hardware
for Bimanual Teleoperation」
MuJoCo によるスケーラブルなロボット学習
ALOHA 2 と MuJoCo (Multi-Joint Dynamics with Contact) の統合は、人間の実演とスケーラブルなロボット学習をつなぐ架け橋です。この物理エンジンは、現実世界へ展開する前にロボットの挙動をテストし洗練するための、高精度で低コストな環境を提供します。
MuJoCo は研究者に次のことを可能にします:
- 制御方策を数分ではなく数マイクロ秒でテストし、開発サイクルを加速します
- 実機には危険すぎるエッジケースを探索し、コストのかかる故障を減らします
- 成功した実演のパラメーターを変化させて合成学習データを生成し、データセットの多様性を広げます
- 学習した挙動をさまざまな環境条件で検証し、現実世界での適応性を高めます
最も重要なのは、ALOHA 2 の正確なシステム同定が、シミュレーションから実機へのシームレスな移行を保証することです。
MuJoCo で洗練された方策はそのまま実機のロボットへ移し替えられ、何十年にもわたってロボティクスを悩ませてきた「シミュレーションと現実のギャップ」を解消します。これにより、シミュレーションで開発された挙動が、果てしない試行錯誤の調整なしに、現実世界での実行においても信頼できるものであることが保証されます。
現実世界での実演、大規模なデータ収集、そして高忠実度のシミュレーションを組み合わせて、ALOHA 2 は適応的で、スケーラブルで、人間にとって直感的なロボット学習の未来を形づくっています。
ロボティクスの未来はオープンだ
何十年もの間、ロボティクスはイノベーションを阻む法外なコスト、ベンダーが支配するエコシステム、そして硬直したアーキテクチャの向こうに閉じ込められてきました。ALOHA 2 は、私たちがこの現状を受け入れる必要はないという証です。これは単により手頃なロボットシステムというだけでなく、ロボティクスをどう作り、共有し、発展させるべきかについての根本的に異なるビジョンなのです。
従来の産業用ロボットはブラックボックスであり、排他的で、高価で、融通の利かないものとして設計されています。ALOHA 2 はそのモデルをひっくり返します。CAD ファイルから制御アルゴリズムまで、すべてがオープンであり、開発者・研究者・エンジニアに、手を加え、反復し、既存の成果の上に積み上げる自由を与えます。メーカーがアップデートをリリースするのを待つ必要はもうありません。専用ハードウェアに縛られることもありません。何かを変更したければ、変更できます。何かを改善したければ、あなたは改善するでしょう。
これがロボティクスにとっての Linux の瞬間です。オープンソースのプラットフォームが、専用システムに匹敵するほど強力でありながら、業界全体を民主化できるほどアクセスしやすいものになる地点です。ALOHA 2 はサブミリ精度、楽々としたテレオペレーション、そして大規模なロボット学習を、すべて従来システムのごく一部のコストで実現します。それが競合を上回るのは、企業秘密の壁に閉じ込められているからではなく、ロボティクスの最も聡明な頭脳たちとの協働に開かれているからです。これこそが本物のイノベーションの姿です。人為的な壁も、有料の壁もなく、ただロボティクスを前進させる作り手たちの成長し続けるエコシステムがあるだけです。DeepMind、Stanford、そして世界中のロボティクス研究所は、オープンソースが主役になったときに何が可能になるかを、すでに証明しつつあります。さあ、次はあなたの番です。
あなたが開発者、研究者、あるいは壁を回り道するのではなく打ち破ることを信じる人であるなら、今がその瞬間です。ALOHA 2 は招待状です。GitHub 上のコードをチェックしてください。MuJoCo モデルを探索してください。ハードウェアを手に入れてください。それを使って実験してください。さらに先へ押し進めてください。ロボティクスがすべての人のものになる未来の一部になってください。
コメントするにはログインしてください。