Desarrollo del diseño conceptual del robot móvil
 3454
3454
En mayo completamos una primera variación del diseño completo del robot. Quiero mostrar paso a paso de qué partimos y qué obtuvimos finalmente.
Requisitos iniciales
- Es necesario crear un concepto de diseño 3D teniendo en cuenta las especificaciones técnicas de la estructura.
- El modelo debe presentarse en un entorno —en interior—, controlado por una persona mediante las gafas de RV Oculus Quest 3.
- Deben proporcionarse los archivos fuente.
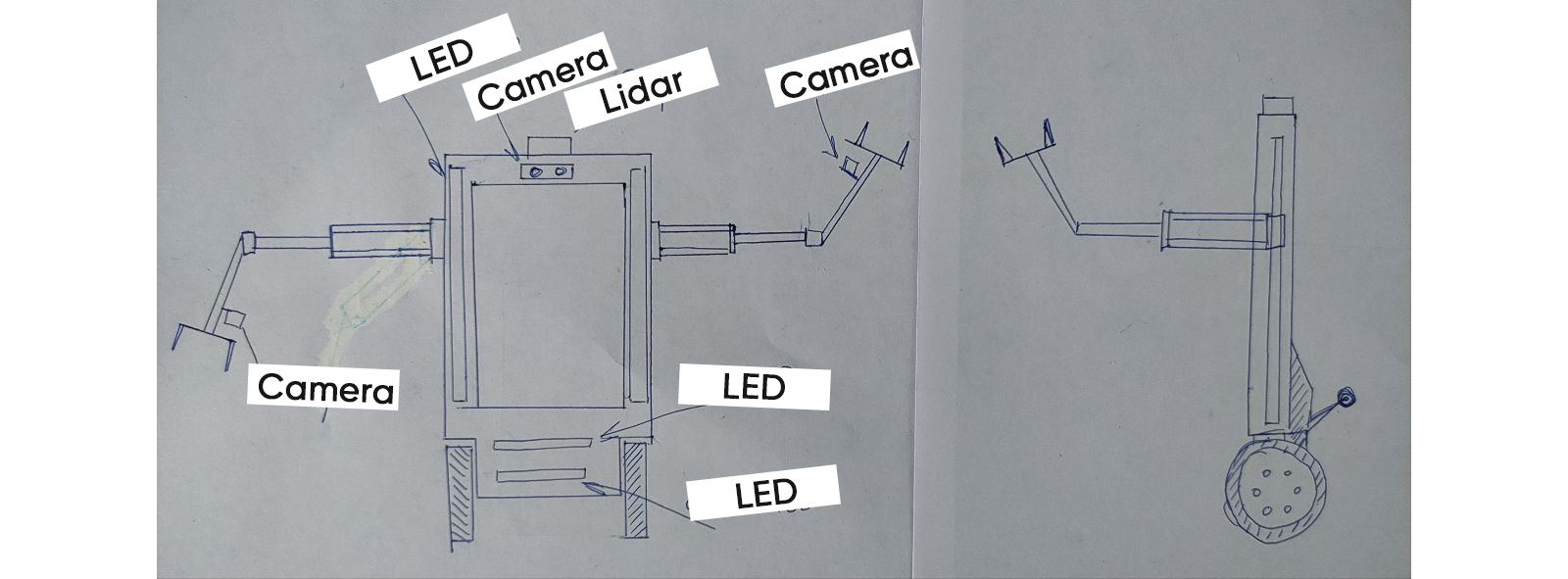
Concepto inicial. Diseño proporcionado por nuestro ingeniero
Parámetros externos
- Color negro mate. Pueden considerarse esquemas de color alternativos: blanco, amarillo.
- Dimensiones del bastidor: de 350 mm a 400 mm × (1300–1400 mm incluida la altura de las ruedas).
- Formato de funcionamiento — como un Segway.
- La vista del bastidor superior en forma de П desde el frente y desde atrás debe ser idéntica.
- En el bastidor superior deben instalarse una cámara de profundidad y un LiDAR.
- En los bastidores laterales deben instalarse tiras de LED.
- También deben instalarse tiras de LED en la plataforma inferior.
- En los manipuladores deben montarse cámaras de profundidad similares a la Intel RealSense D405.
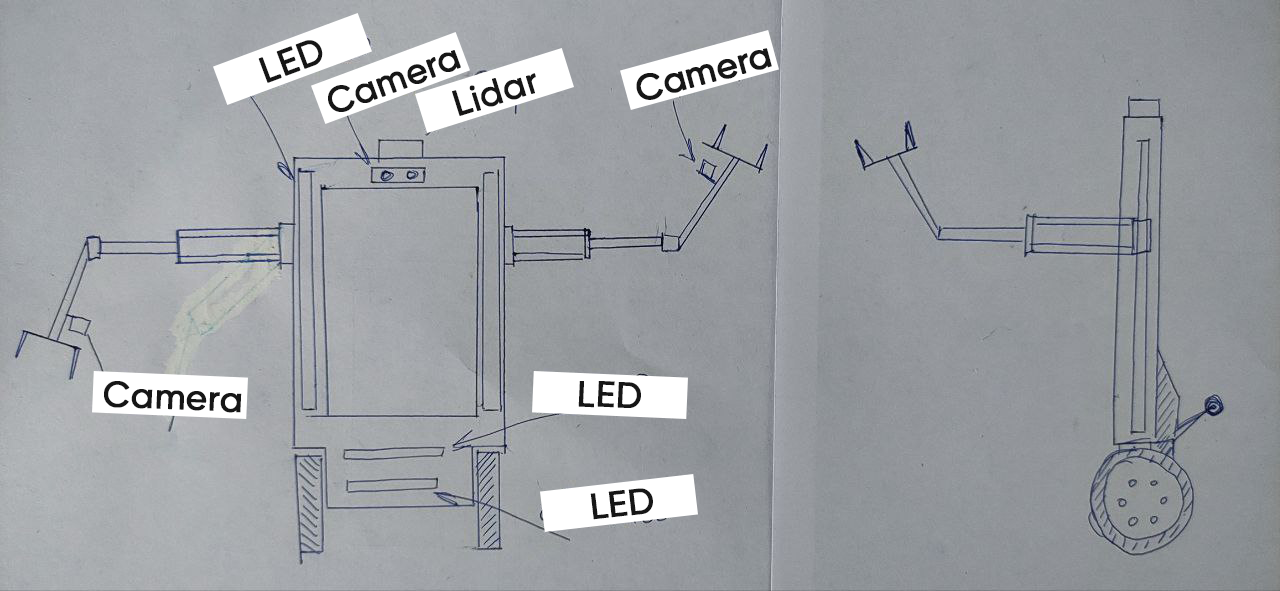
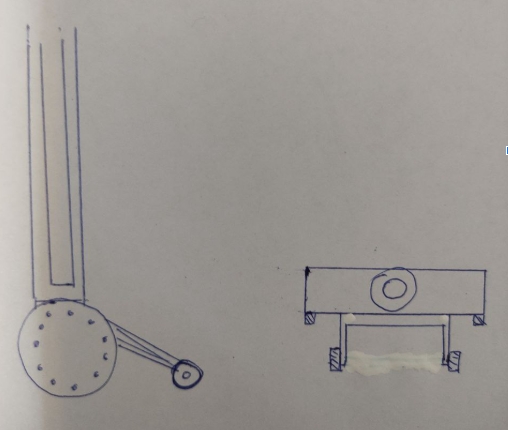
El boceto muestra la posición de los detectores
Mecanismo de equilibrio
La cola estará siempre en posición baja y tendrá una forma recta parecida a la letra П, con un rodillo en cada extremo. Los rodillos no son motrices.
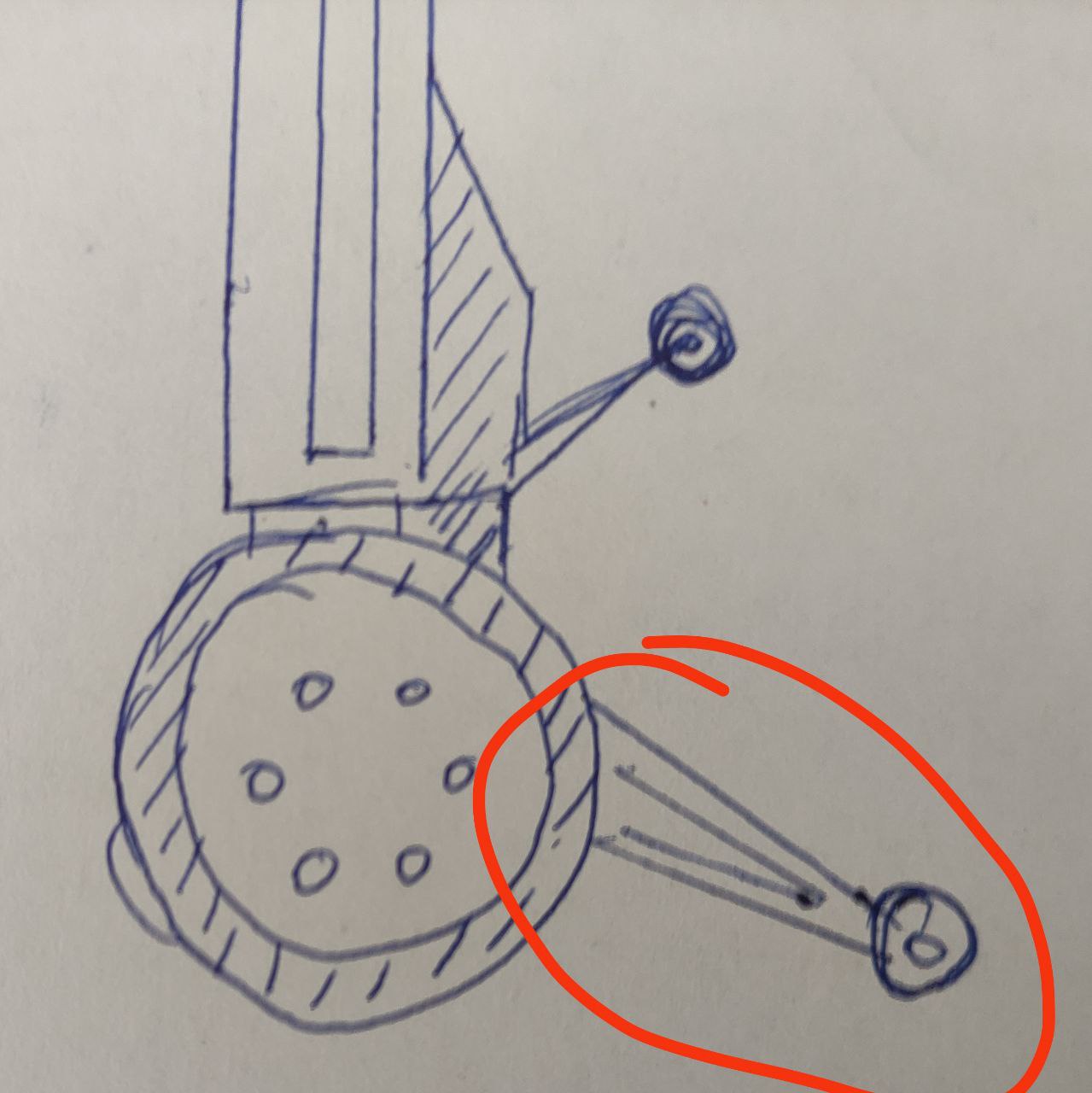
Mecanismo de equilibrio. Posición baja. Vista de perfil
Mecanismo de equilibrio
Ruedas
Ruedas giratorias, como en la imagen: Ruedas industriales pequeñas de 3 pulgadas

Ruedas traseras del robot
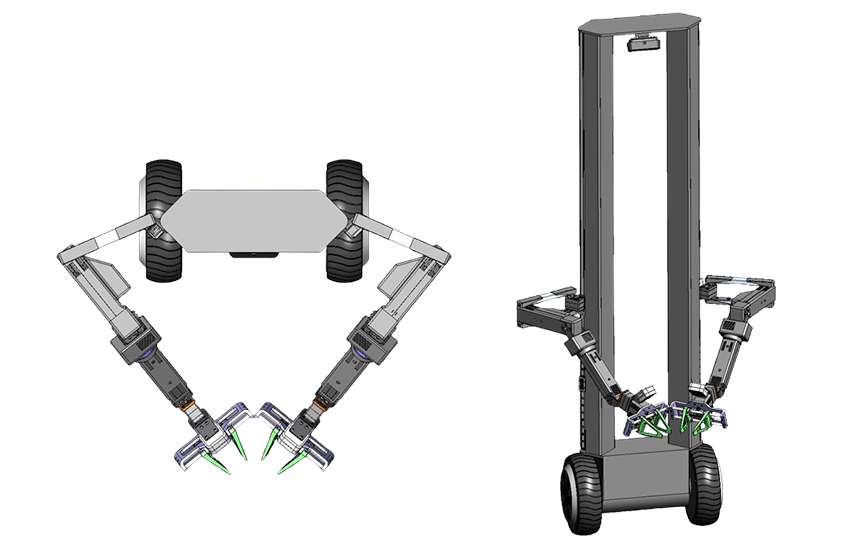
Manipuladores
- Los manipuladores se extienden a toda la altura del mástil.
- Altura — 1300 mm
- Longitud — 650 mm
- El saliente de la segunda articulación debe ajustarse; el ingeniero determinará cómo eliminar o desplazar la estructura hacia el interior.
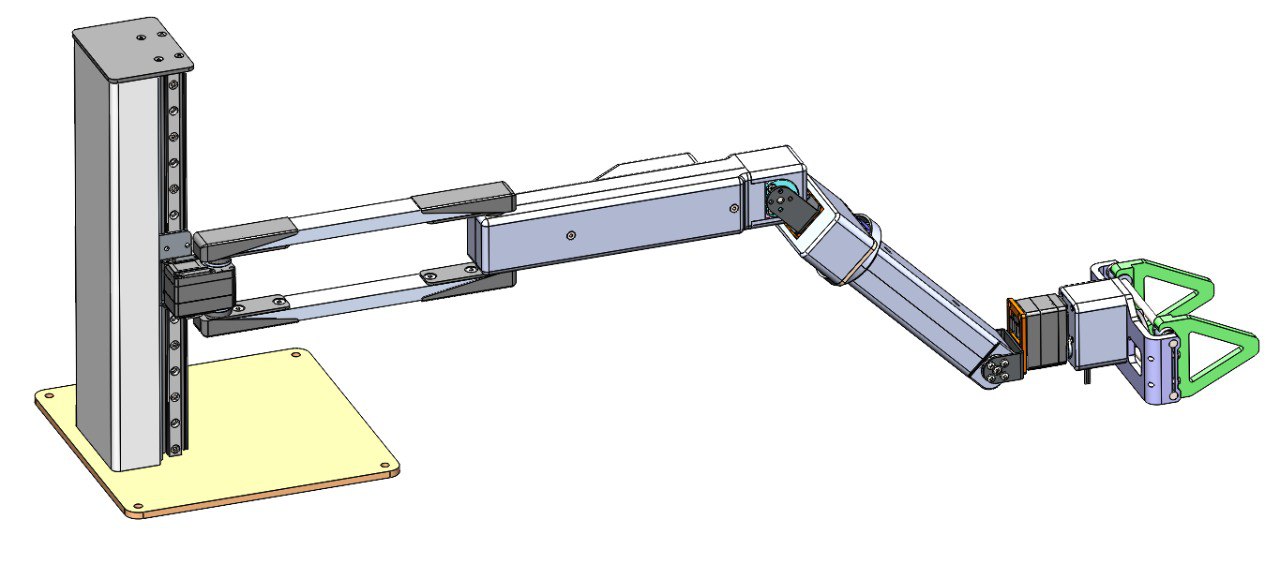
Brazo del robot
Diseño de la pinza
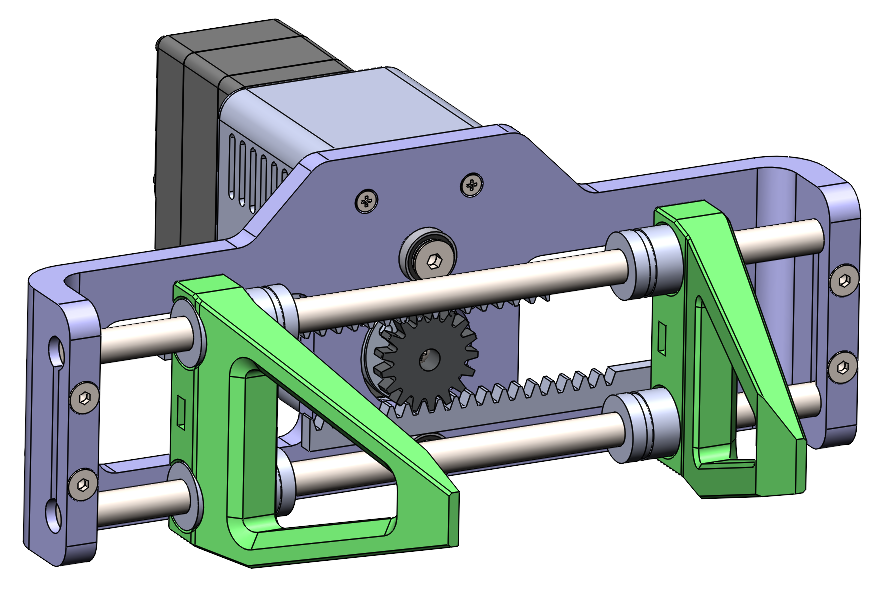
Diseño de pinza paralela
Posición de los mástiles de los manipuladores
- Los mástiles deben girarse en un ángulo de 45 grados para garantizar el máximo alcance.
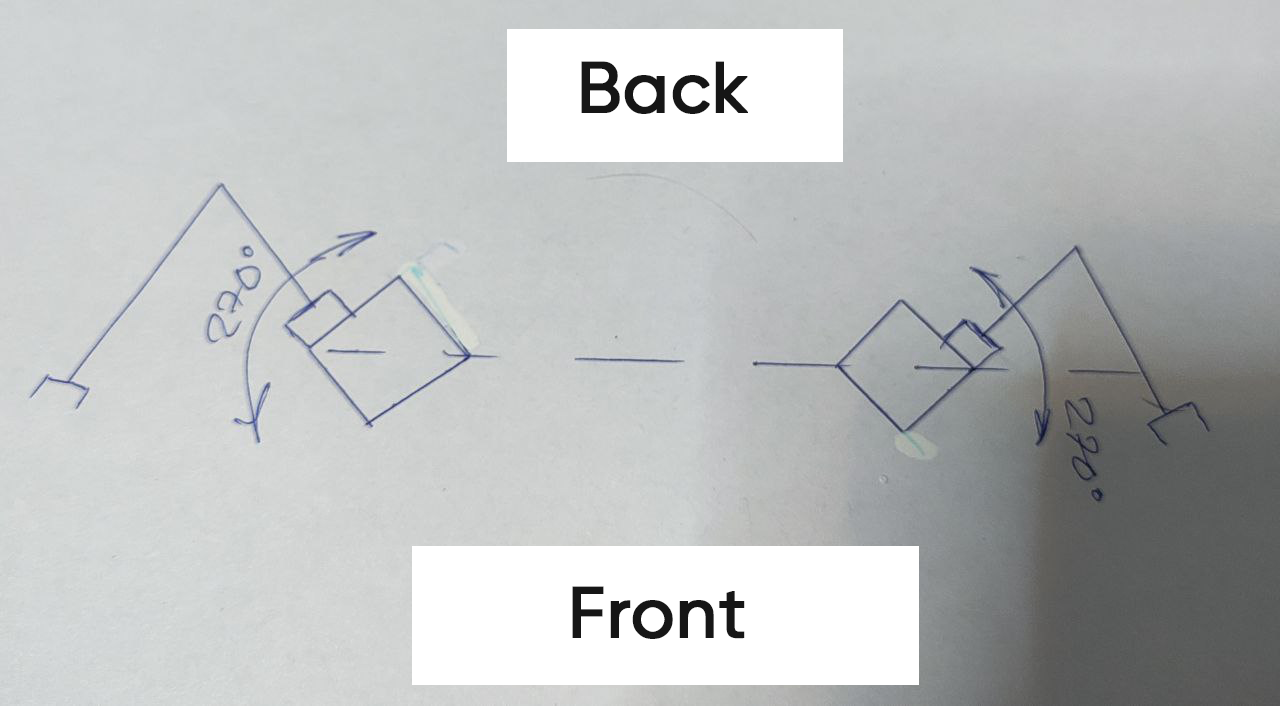
Ángulo de los mástiles del bastidor principal
La idea de esa inclinación de los mástiles es ofrecer el mayor espacio de trabajo posible para los manipuladores.
Sensores superiores
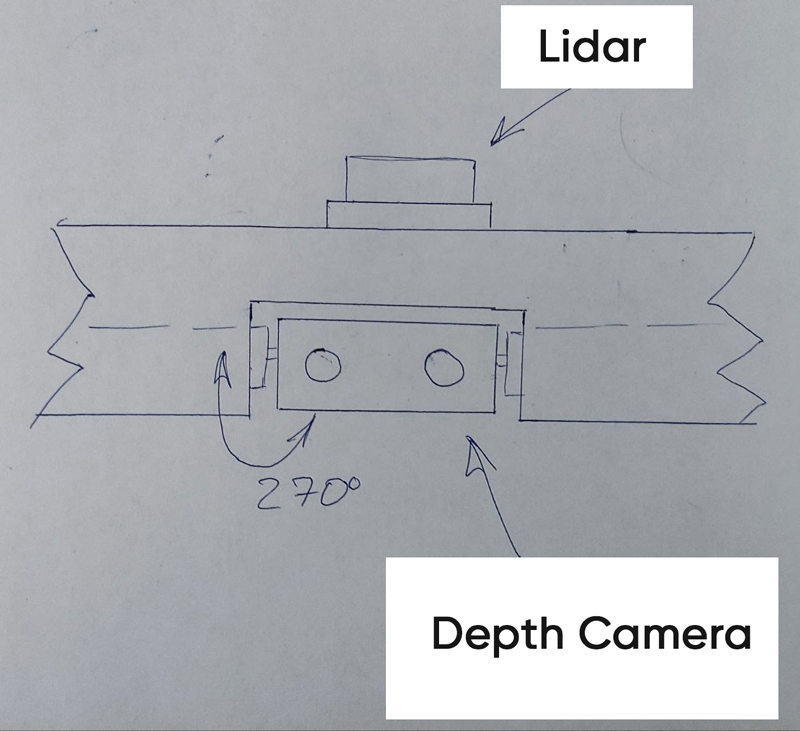
Sensores superiores
- La cámara de profundidad debe girar hacia delante y hacia atrás.
- Inicialmente pensé en usar lidars 3D, así que coloqué uno en la parte superior.
Motores de las ruedas inferiores
- Tamaño: 8,5 pulgadas
- Ruedas de 8,5 pulgadas para patinetes eléctricos

Ruedas con motor eléctrico delanteras
Primera versión del bastidor principal del robot

Primera versión del bastidor principal del robot. Vista frontal

Primera versión del bastidor principal del robot. Vista de perfil

Primera versión del bastidor principal del robot. Vista trasera
En esta versión:
- Decidimos usar una parte trasera pesada en lugar de una cola adaptativa. Al principio pensé en un depósito de agua, porque necesitamos unos 20 kg de peso para compensar el momento de vuelco hacia delante cuando los brazos están extendidos con el peso máximo.
- El diseñador utilizó el color naranja para que el robot sea visible desde lejos.
Primera versión del bastidor principal del robot

Segunda versión del bastidor principal del robot. Vista frontal

Segunda versión del bastidor principal del robot. Vista frontal
Novedades
- Cambiamos al color negro, porque los plásticos técnicos resistentes suelen ser de color negro.
- Decidimos usar una superficie plana en la parte trasera para que los futuros usuarios puedan colocar algo encima.
- En lugar de un depósito de agua, encontramos baterías de alta capacidad que podemos usar para compensar el momento de vuelco hacia delante.
- El diseñador añadió luces delanteras en la base móvil, y un lidar y una cámara de profundidad en la parte superior del bastidor.
Última versión del diseño conceptual. Pero no la definitiva…

Concepto de diseño del Robot V0. Vista frontal

Concepto de diseño del Robot V0. Vista trasera
- El diseñador añadió 2 manipuladores.
- Luz trasera.
- Botón de parada para evitar cualquier posible comportamiento extremo. Como en el siguiente vídeo viral:
https://youtu.be/1eYZr9vdGl8?si=-7L6Zf6fB64xzQUC - Segundo lidar
Notas
El diseño definitivo diferirá del actual.
- Actualmente trabajamos en la compensación del juego de los motores mediante un diseño de doble servo, por lo que los brazos definitivos tendrán un diseño diferente.
- En lugar de lidars 3D, probablemente usaremos una combinación de sensores: lidars 2D y 1D y sensores ultrasónicos de distancia.
Inicia sesión para dejar un comentario.