Construindo um braço de código aberto. A garra
 12722
12722
Quero compartilhar alguns detalhes sobre como está avançando o desenvolvimento do nosso manipulador acessível. No momento, estamos nos preparando ativamente para a etapa de montagem do primeiro protótipo do braço robótico.
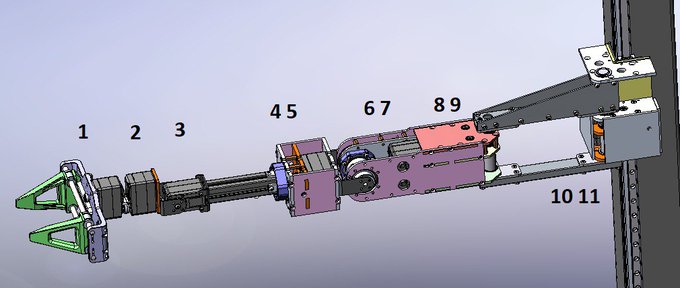
Braço robótico de 7 graus de liberdade
Estabelecemos uma meta bastante ambiciosa: alcançar especificações comparáveis às dos principais manipuladores de nível de pesquisa — 650 mm de comprimento, 7 graus de liberdade, capacidade de carga de até 3 kg e precisão de posicionamento dentro de 1 mm. Todos os arquivos-fonte e desenvolvimentos serão disponibilizados publicamente — ou quase todos, dependendo do nível de apoio que recebermos da comunidade de robótica.
O que é uma garra
A primeira coisa que estamos prontos para compartilhar é a garra.
Descrição: Uma garra é um dispositivo mecânico ou robótico projetado para agarrar, segurar, manipular ou transportar objetos. Funciona como a «mão», ou efetuador final, de um braço robótico ou sistema de automação, permitindo que o robô interaja com o mundo físico ao agarrar e soltar objetos.
A garra está disponível como código aberto no GitHub.
Consideramos muitas opções de projeto para a garra e, no fim, escolhemos um mecanismo de mandíbulas paralelas. Os critérios que usamos na escolha do projeto foram:
- Simplicidade da construção
- Capacidade de agarrar objetos redondos
- Capacidade de pegar objetos planos sobre uma mesa
- Uso mínimo de servos
- Custo e confiabilidade do projeto
Garra giratória de mandíbula única
Provavelmente um dos projetos de garra mais simples que encontramos — a garra giratória de mandíbula única — é uma configuração em que uma mandíbula é fixa e a outra é montada diretamente no eixo de um servomotor.
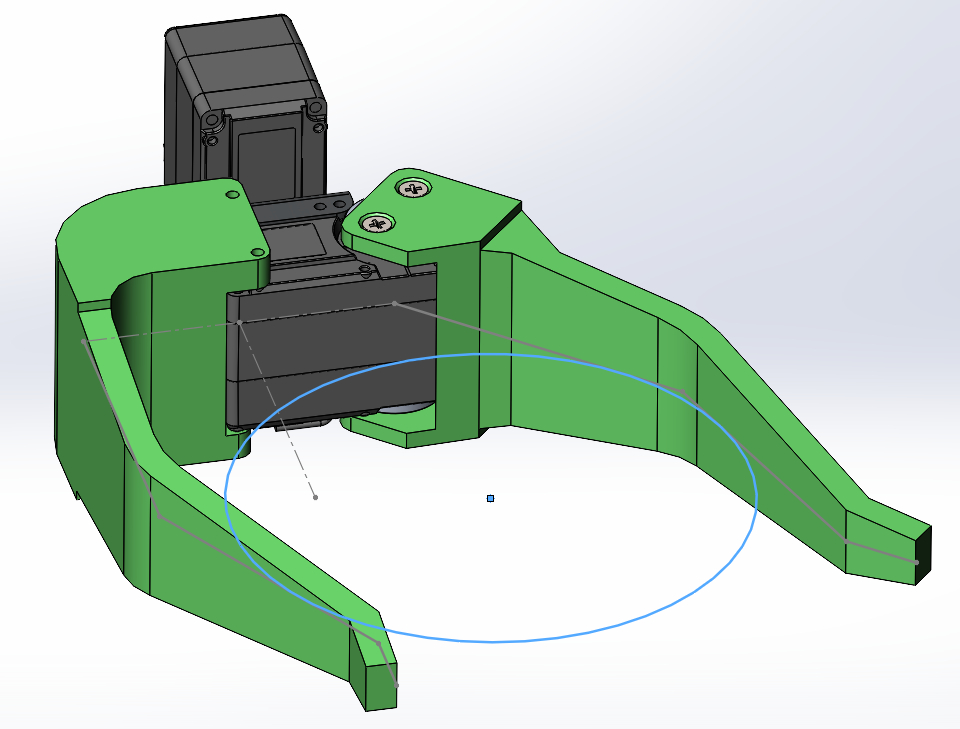
Garra giratória de mandíbula única (vista 3D)
- A desvantagem dessa solução é que a borda frontal da mandíbula móvel descreve um arco. Assim, se precisarmos agarrar um objeto pequeno com as pontas da garra, temos que levar em conta que o objeto deve estar posicionado ao longo dessa trajetória em arco durante o fechamento.
- Uma segunda desvantagem é que, como apenas uma mandíbula se move, a largura máxima do objeto que pode ser agarrado é limitada pelo curso dessa única mandíbula móvel. Para agarrar o mesmo volume que uma garra paralela, as mandíbulas precisam ser bem mais longas.
Comparação do comprimento das mandíbulas. Garra giratória de mandíbula única versus garra paralela
- A terceira desvantagem é que esse tipo de garra é assimétrico, ou seja, o centro de massa está sempre deslocado para o lado móvel.
Levando em conta todas essas desvantagens da garra giratória de mandíbula única, decidimos explorar, em vez dela, projetos simétricos de garra paralela.
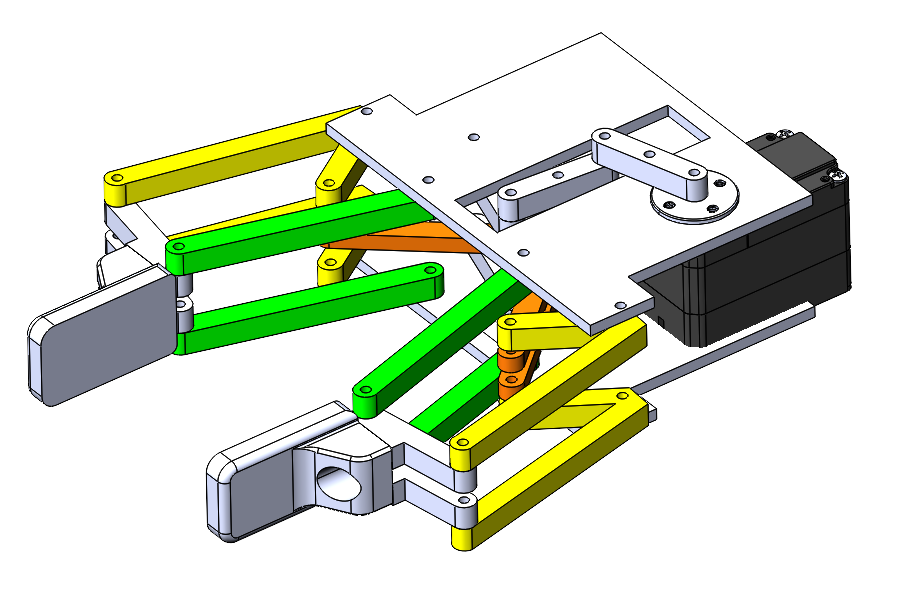
Garra paralela de mecanismo de quatro barras versus garra paralela comum
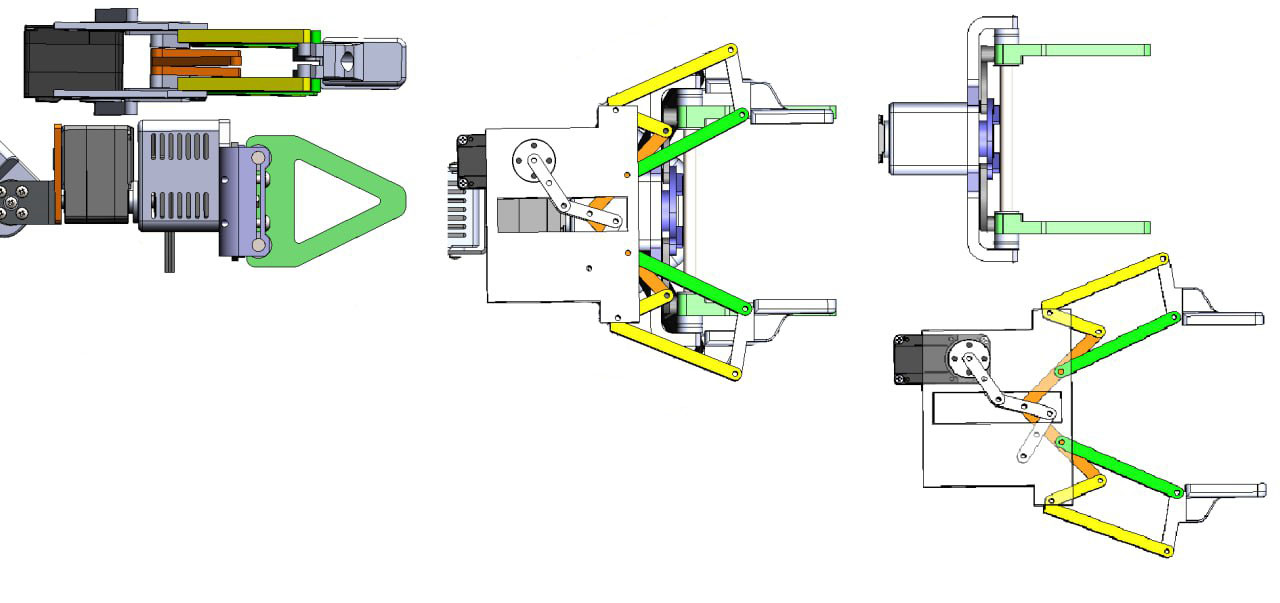
Garra paralela de mecanismo de quatro barras versus garra paralela comum
A imagem acima mostra duas versões de uma garra de mandíbulas paralelas usando um único servomotor. A garra paralela de mecanismo de quatro barras, em que as mandíbulas se abrem em ângulo, acaba sendo nitidamente mais complexa em número de peças e em dimensões gerais.
Poderíamos ter continuado a otimizar esse projeto, mas decidimos que uma garra paralela é mais simples de montar e, portanto, também seria mais barata de fabricar.
Mecanismo de manivela e balancim
Mecanismo de manivela e balancim
A próxima questão importante foi a escolha do mecanismo de deslocamento. A primeira opção proposta pelo engenheiro foi o mecanismo de manivela e balancim. Uma desvantagem significativa desse projeto de garra é a sua altura. Se as mandíbulas da garra forem mais curtas do que a altura do mecanismo de deslocamento, a parte inferior atrapalhará a coleta de objetos de superfícies planas, limitando a capacidade de agarrar itens especialmente achatados. Se aumentarmos a altura das mandíbulas para compensar, a garra fica bastante volumosa.
Por isso passamos a considerar o mecanismo de garra de cremalheira e pinhão.
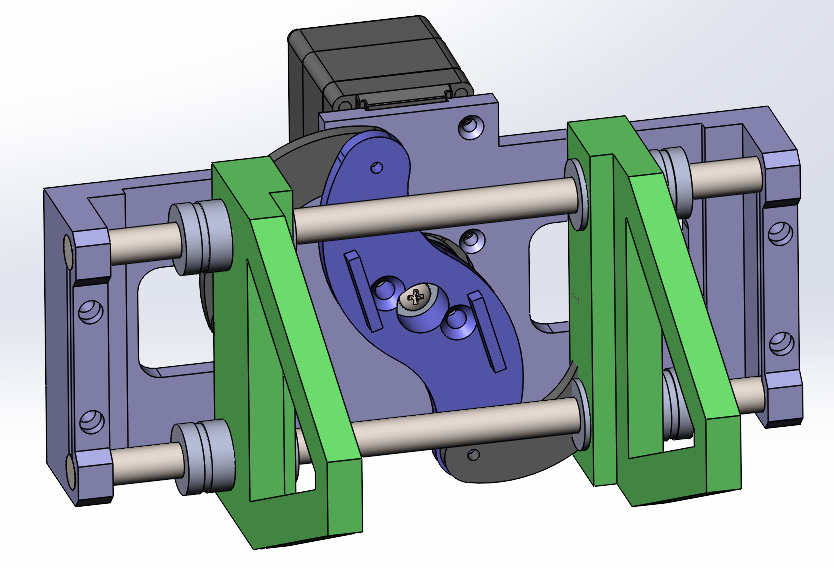
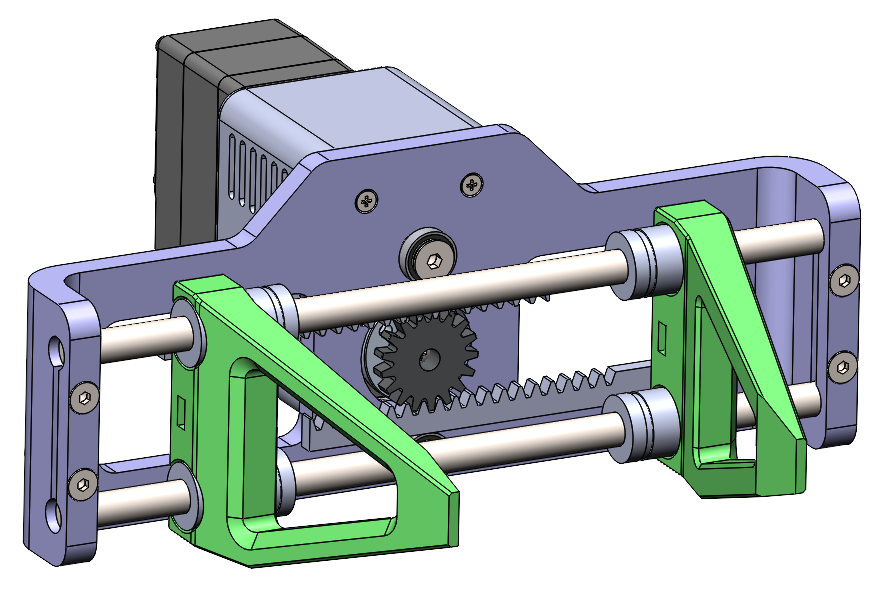
Mecanismo de garra de cremalheira e pinhão
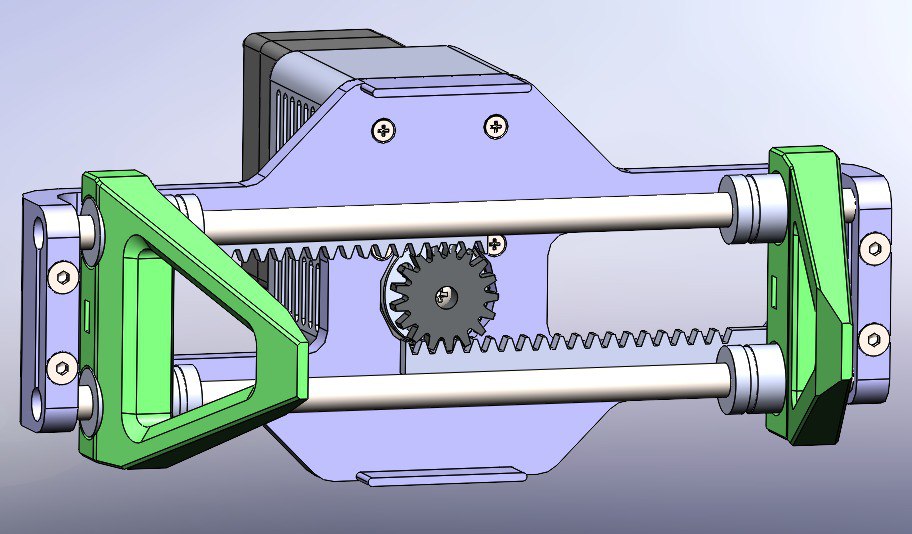
Mecanismo de garra de cremalheira e pinhão. Versão 1
Nesta imagem, substituímos o balancim por um mecanismo de cremalheira. Também dá para ver quanto espaço livre se ganhou em comparação com a versão anterior.
Na etapa seguinte, o engenheiro acrescentou batentes e reduziu a altura do conjunto.
Mecanismo de garra de cremalheira e pinhão. Versão 2
Uma das desvantagens que ainda restam no projeto atual são as chamadas «orelhas»: quando o braço precisa alcançar espaços relativamente estreitos, essas saliências podem limitar bastante a capacidade de manobra. Isso também pode se tornar um problema ao trabalhar perto de superfícies planas, caso a garra precise girar em torno do próprio eixo.
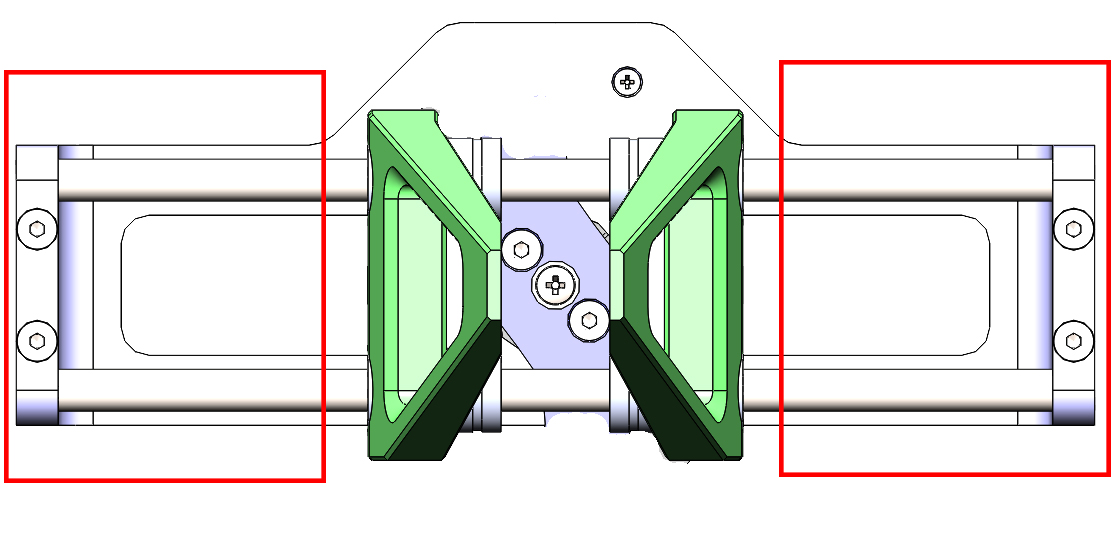
«Orelhas» da garra
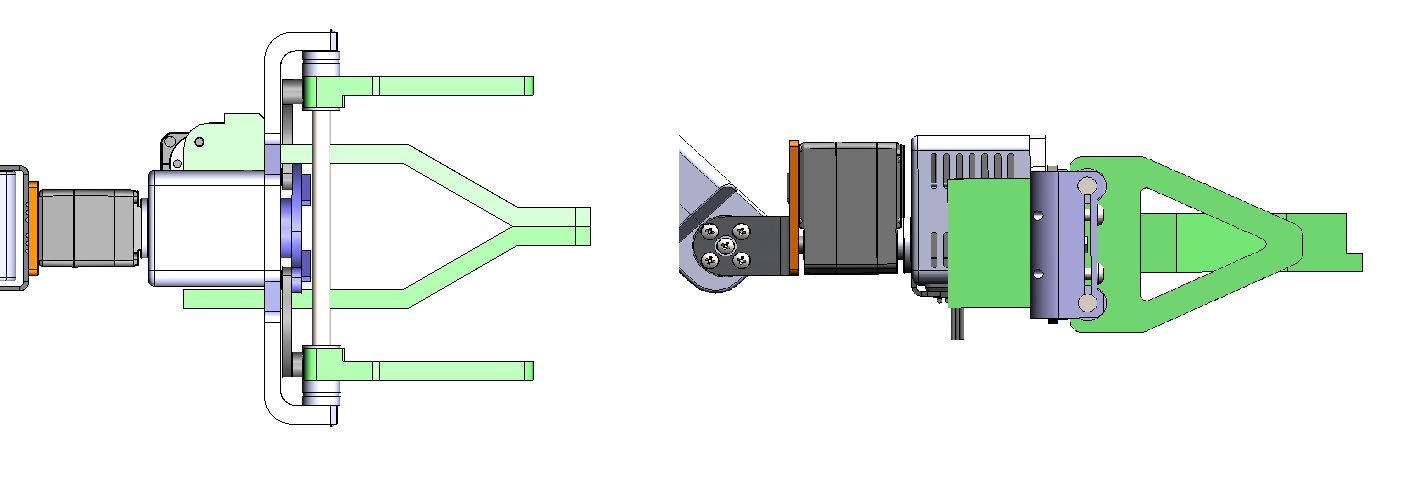
Câmera de profundidade
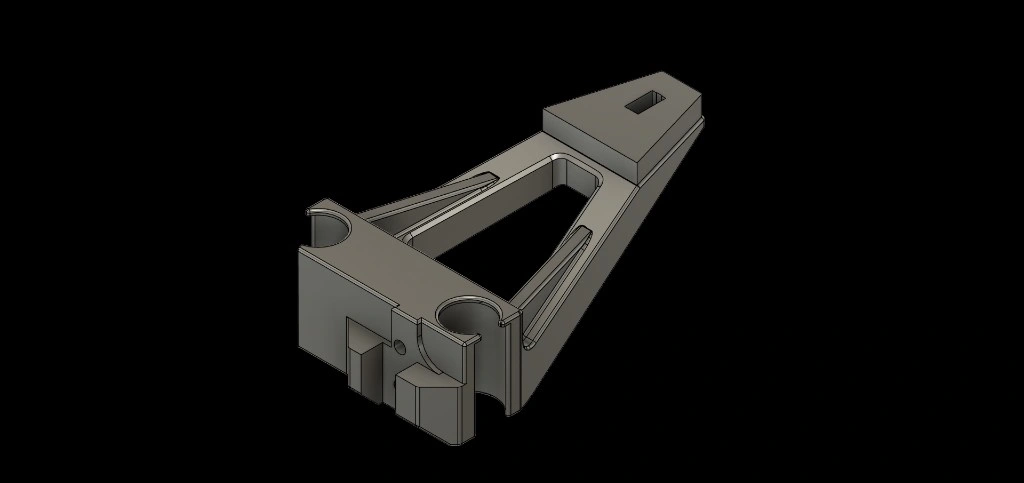
A garra é usada em combinação com uma câmera de profundidade e, na etapa seguinte, foi acrescentada uma placa de montagem para fixá-la.
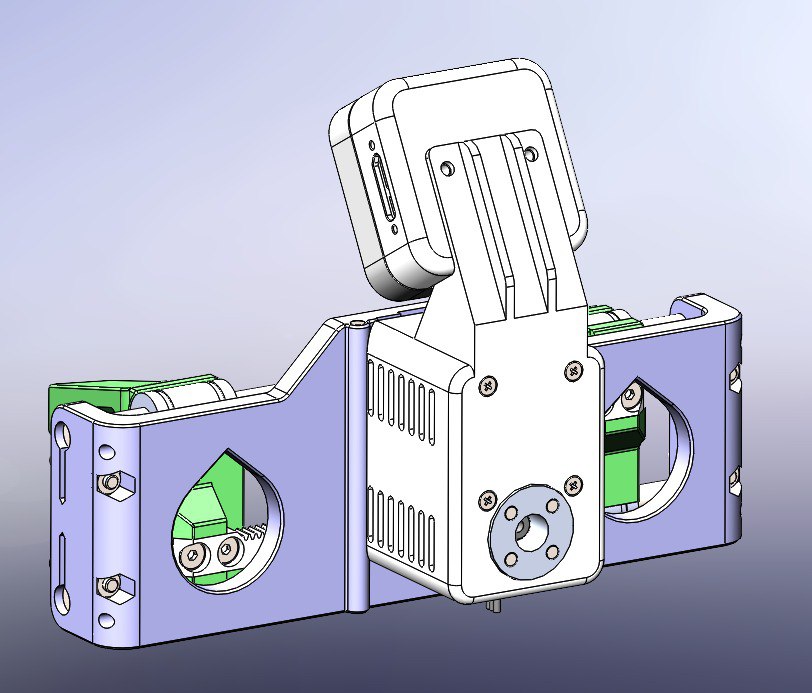
Suporte da câmera de profundidade
A câmera é posicionada em um ângulo de 45 graus para obter o campo de visão de trabalho mais amplo possível. Ela é usada por um modelo de controle baseado em aprendizado de máquina para determinar com precisão as dimensões do objeto a ser agarrado, a força de preensão necessária e a largura de abertura das mandíbulas adequada. É o único sensor instalado na garra.
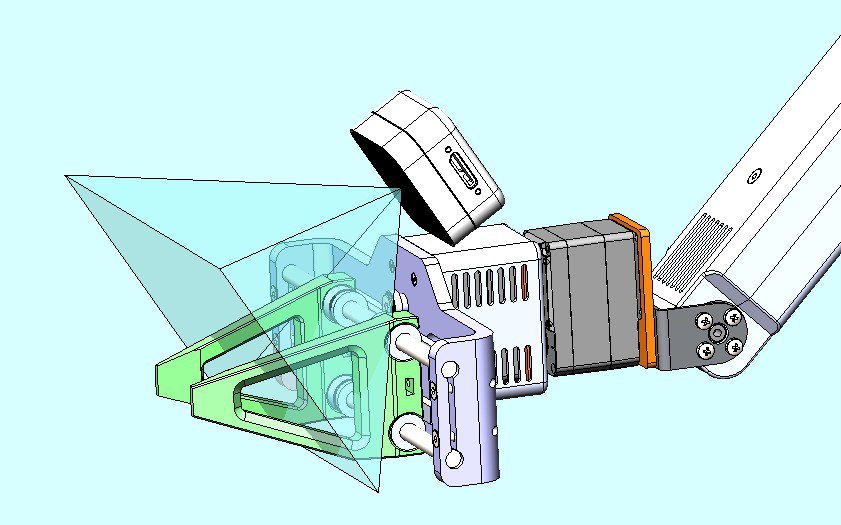
Ângulo de visão da câmera de profundidade
Neste ponto, pausamos o trabalho de projeto e passamos à montagem do protótipo para identificar quaisquer problemas práticos do projeto atual. Parte dos componentes foi encomendada na AliExpress.
Lista de materiais
Componentes eletrônicos
| Item | Descrição | Qtd. | Link do fornecedor | Preço | Observações |
| ST3215 Servo | Waveshare Servo Motor STS3215 | 1 | Amazon – Waveshare STS3215 Servo | $28.99 | Servo de barramento de alta precisão com realimentação |
| Bus Servo Adapter | Waveshare Bus Servo Adapter Board | 1 | Amazon – Bus Servo Adapter A | $10.99 | Interface de comunicação TTL/RS485 |
Componentes mecânicos
| Item | Descrição | Qtd. | Link do fornecedor | Preço | Observações |
| MR106ZZ | Rolamento de esferas 10×6×3 mm | 2 | Amazon – ACROPIX MR106ZZ Bearings (10pcs) | $5.49 (10pcs) | Blindado, pré-lubrificado |
| LM6UU | Rolamento linear 6×12×19 mm | 4 | Amazon – uxcell LM6UU Bearings (4pcs) | $8.99 (4pcs) | Para movimento linear suave |

Hastes de aço e rolamentos lineares
Rods
| Item | Descrição | Qtd. | Link do fornecedor | Preço | Observações |
| Steel Rod | Haste de aço inoxidável 6 mm × 150 mm | 2 | Amazon – uxcell Stainless Steel Rod 6mm×150mm (5pcs) | $8.39 (5pcs) | Alta precisão, resistente à corrosão |
3D-Printed Parts
| Part Number | Descrição | Qtd. | Material | Configurações de impressão |
| RB9.01.060.010 | Estrutura principal | 1 | PLA/PETG | 0.2mm layer, 20% infill |
| RB9.01.060.020 | Grampo | 2 | PLA/PETG | 0.2mm layer, 20% infill |
| RB9.01.060.030 | Cremalheira | 2 | PLA/PETG | 0.15mm layer, 30% infill |
| RB9.01.060.040 | Engrenagem motriz | 1 | PLA/PETG | 0.15mm layer, 30% infill |
Observações sobre impressão 3D
- Material: PLA recomendado para prototipagem, PETG para uso em produção
- Altura de camada: 0,15–0,2 mm para um acabamento de superfície ideal
- Preenchimento: recomenda-se preenchimento maior (30%) para as engrenagens, a fim de garantir resistência
- Suportes: podem ser necessários dependendo da orientação na impressora
- Pós-processamento: pode ser necessário um leve lixamento para os encaixes dos rolamentos
Parafusos
| Item | Descrição | Qtd. | Padrão | Preço | Observações |
| M3×10 | Parafuso de cabeça escareada | 4 | Amazon – M3×10 Parafuso de cabeça escareadas | $6.39 (100pcs) | Para fixação da cremalheira |
| M3×20 | Parafuso de cabeça escareada | 4 | Amazon – M3×20 Parafuso de cabeça escareadas | $6.99 (100pcs) | Para fixação do grampo à haste |
| M4×8 | Parafuso de cabeça escareada | 2 | Amazon – M4×8 Parafuso de cabeça escareadas | $9.99 (100pcs) | Para retenção do rolamento da estrutura principal |
Porcas
| Item | Descrição | Qtd. | Padrão | Preço | Observações |
| M3 | Porca sextavada | 4 | Amazon – M3 Porca sextavadas | $5.99 (100pcs) | Para montagem do grampo |
Fixadores do servo
| Item | Descrição | Qtd. | Origem | Preço | Observações |
| Parafusos autoatarraxantes | Parafusos de fixação do servo | 4 | Kit do servo | Incluído | Incluído com o STS3215 |
| Disco do servo | Adaptador do eixo de saída | 1 | Kit do servo | Incluído | Incluído com o STS3215 |
| Parafuso de fixação | Parafuso de retenção do disco | 1 | Kit do servo | Incluído | Incluído com o STS3215 |
Estimativa de custo
| Category | Custo estimado (USD) |
| Componentes eletrônicos | $39.98 |
| Componentes mecânicos | $22.87 |
| Materiais para impressão 3D | $5-10 |
| Fixadores | $1.60 (approximate) |
| Total | $69.45-74.45 |
Custos baseados nos preços da Amazon na data atual — 6 de junho de 2025. Quantidades em grande volume proporcionam economia significativa em fixadores.
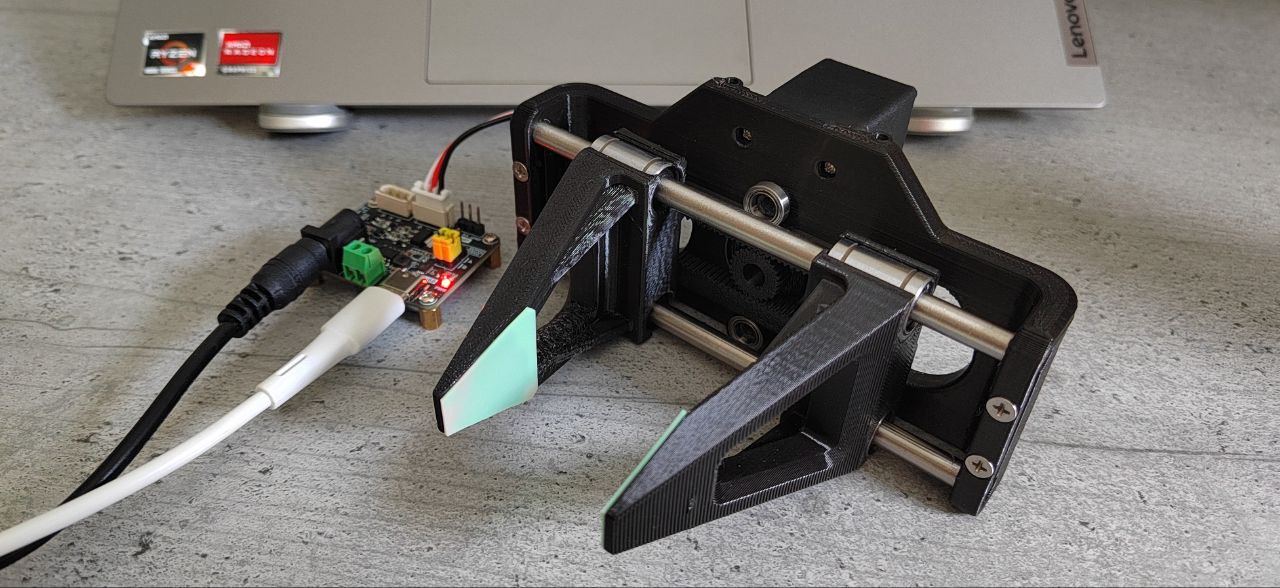
Montagem
Montagem guide:
https://github.com/roboninecom/3D-Printed-Parallel-Gripper-for-Robotics-Arms/blob/main/docs/assembly-guide.md
Durante a montagem da primeira versão, houve um problema na impressão de uma das mandíbulas da garra, então o primeiro teste foi feito com apenas uma mandíbula.
Alguns dias depois, a segunda mandíbula chegou e conseguimos realizar o teste completo.
O engenheiro acrescentou almofadas de silicone para melhor aderência aos objetos. Essa mesma primeira versão foi publicada como código aberto em nosso GitHub:
https://github.com/roboninecom/3D-Printed-Parallel-Gripper-for-Robotics-Arms
Comentários da comunidade
Hadassah Freedman:
«Eu queria saber se vocês consideraram como o projeto lida com cargas mais pesadas, especialmente na base da cremalheira e nos pivôs das mandíbulas. Talvez acrescentar arredondamentos nessas áreas ajudasse a reduzir as concentrações de tensão e a evitar a separação de camadas em impressões FDM, permitindo que o projeto suporte cargas mais pesadas por períodos mais longos e com mais frequência. Vejo que a base da cremalheira tem uma espessura razoável, mas não há arredondamentos claros na transição para os dentes verticais da engrenagem, o que pode ser um concentrador de tensão; os pivôs das mandíbulas também não têm arredondamentos visíveis para suavizar os caminhos de carga dos pinos de pivô para as paredes laterais. Eu teria curiosidade de saber mais sobre suas capacidades.»
Joy Kariya:
«Dei uma olhada no repositório e tenho uma sugestão: por que vocês não integram chaves de fim de curso nos dois lados da garra, para que, em vez de um atraso de tempo, ela desligue quando o objeto for agarrado? Assim ela também conseguiria pegar objetos pequenos.»
Garra com chaves de fim de curso integradas
qual material vcs recomendam pros dedos? petg ou abs?
Recomendamos PETG para os dedos pela boa resistência ao impacto e flexibilidade. ABS funciona, mas tende a quebrar mais fácil em quedas e exige câmara fechada para imprimir bem.
uso essa garra num projeto educacional com alunos e funciona super bem, obrigado por liberar open source
fiz uma adaptaçao com ponta intercambiavel via imã, ficou mt pratico pra trocar de gripper
as superficies de contato escorregam muito, coloquei uns pads de silicone e melhorou demais
Parabéns pelo projeto. A decisão de usar um único atuador para acionar ambos os dedos via engrenagem espelhada simplifica muito a montagem e reduz o custo, e a documentação do CAD está impecável.
Excelente trabalho de engenharia mecânica. Gostaria de saber se vocês fizeram análise de elementos finitos nos dedos, porque na minha versão eles flexionam visivelmente sob carga e queria entender se é problema de design ou da minha impressão.
Não chegamos a fazer FEA formal, foi iteração empírica. A flexão que você descreve geralmente é falta de preenchimento ou poucas paredes; suba para 4 perímetros e 40% de infill nos dedos antes de mexer no design.
ADOREI o mecanismo de paralelogramo, mantem os dedos sempre paralelos genial
achei genial usar elástico de borracha pra dar compliance passiva nos dedos, ideia simples e eficaz
to montando uma versao adaptada pra braço maior, ajustar as dimensoes foi tranquilo com o cad parametrico
tem como controlar a força do aperto só por corrente do servo ou precisa de sensor mesmo?
Dá para estimar a força pela corrente do servo, sim, e funciona bem para um controle aproximado de aperto. Para precisão repetível com objetos delicados, um sensor de força dedicado é mais confiável.
montei em um fim de semana, instrucoes claras, encaixe perfeito, recomendo muito pra quem ta começando
achei o passo de inserir os parafusos de calor meio mal explicado, fora isso tudo certo
vc tem versao com acionamento por servo de cabo (tendao) ao inves de engrenagem?
Ainda não, a versão atual é toda por engrenagem. Um acionamento por tendão é interessante para reduzir peso na ponta, está anotado como possível variante futura.
Faz sentido, obrigado.
qual o peso maximo que essa garra aguenta segurar na horizontal?
Depende muito da geometria do braço de alavanca, mas com dedos de PETG e um STS3215 (cerca de 30 kg·cm de torque de stall a 12 V) ela segura objetos do dia a dia com folga. Acima de uma certa carga o servo começa a derrapar ou a peça flexiona, então vale testar com a sua aplicação específica.
qual diametro de parafuso vcs usaram nas juntas dos dedos?
Usamos parafusos M3 nas juntas dos dedos, com insertos de latão por calor onde indicado no manual. Tudo está listado na BOM junto com os comprimentos.
imprimi aqui e os dentes da engrenagem nao encaixaram direito, alguem teve esse problema?
Provavelmente é tolerância da impressora. Tente ajustar o horizontal expansion em -0,1 mm no slicer ou recalibrar o fluxo, que costuma resolver o encaixe das engrenagens.
muito bom! so achei q precisa de mais reforço na base
design da garra ficou elegante, mas a fixação do servo me parece frágil
garra boa. curso curto demais pro meu uso porém.
Trabalho admirável e que reforça o quanto o hardware aberto democratiza a robótica de manipulação para quem não tem orçamento para garras industriais.
design limpo demais. parabens pela documentação
imprimindo agora, depois posto o resultado!!!
vcs pensaram em colocar sensor de força nas pontas? pra pegar coisas frageis sem esmagar
Pensamos sim, e há espaço previsto na ponta dos dedos para um sensor resistivo de força. Pretendemos lançar uma variante com feedback de força numa próxima iteração.
que projeto lindo, já baixei os STL pra imprimir no fds
simples, barato e funcional. é isso que eu queria ver. mandaram bem