Mobile ALOHA:オープンソースの家事ロボット
 4322
4322
はじめに
Mobile ALOHA プロジェクトは、スタンフォード大学のチームが Boston Dynamics AI Institute と協力して開発したもので、ロボティクスにおける大きな飛躍を示します。低コストの全身遠隔操作システムを導入することで、従来の卓上型マニピュレーションシステムの限界に対処し、複雑なモバイル操作タスクを実行できます。本記事では Mobile ALOHA のハードウェア設計、ソフトウェアアルゴリズム、実世界での応用を取り上げ、家庭および産業環境でロボティクスを変革する可能性に焦点を当てます。
ハードウェア設計
Mobile ALOHA は、モジュール式の双腕ロボットとモバイルベースを組み合わせ、移動性と器用さの両方を必要とするタスクを実行できます。主要なコンポーネントは次のとおりです:
-
- 双腕ロボット:本システムは ALOHA ロボットを使用し、平行グリッパーを備えた6自由度のアームを2本搭載しています。これらのアームは柔軟性とメンテナンスのしやすさを重視して設計されており、料理や掃除のような複雑なタスクに最適です。
- モバイルベース:ロボットは Mecanum ホイールのベースに搭載され、人の歩行速度(約 1.42 m/s)で移動できます。このベースは安定性と機動性をもたらし、ロボットが屋内環境を効果的に移動できるようにします。
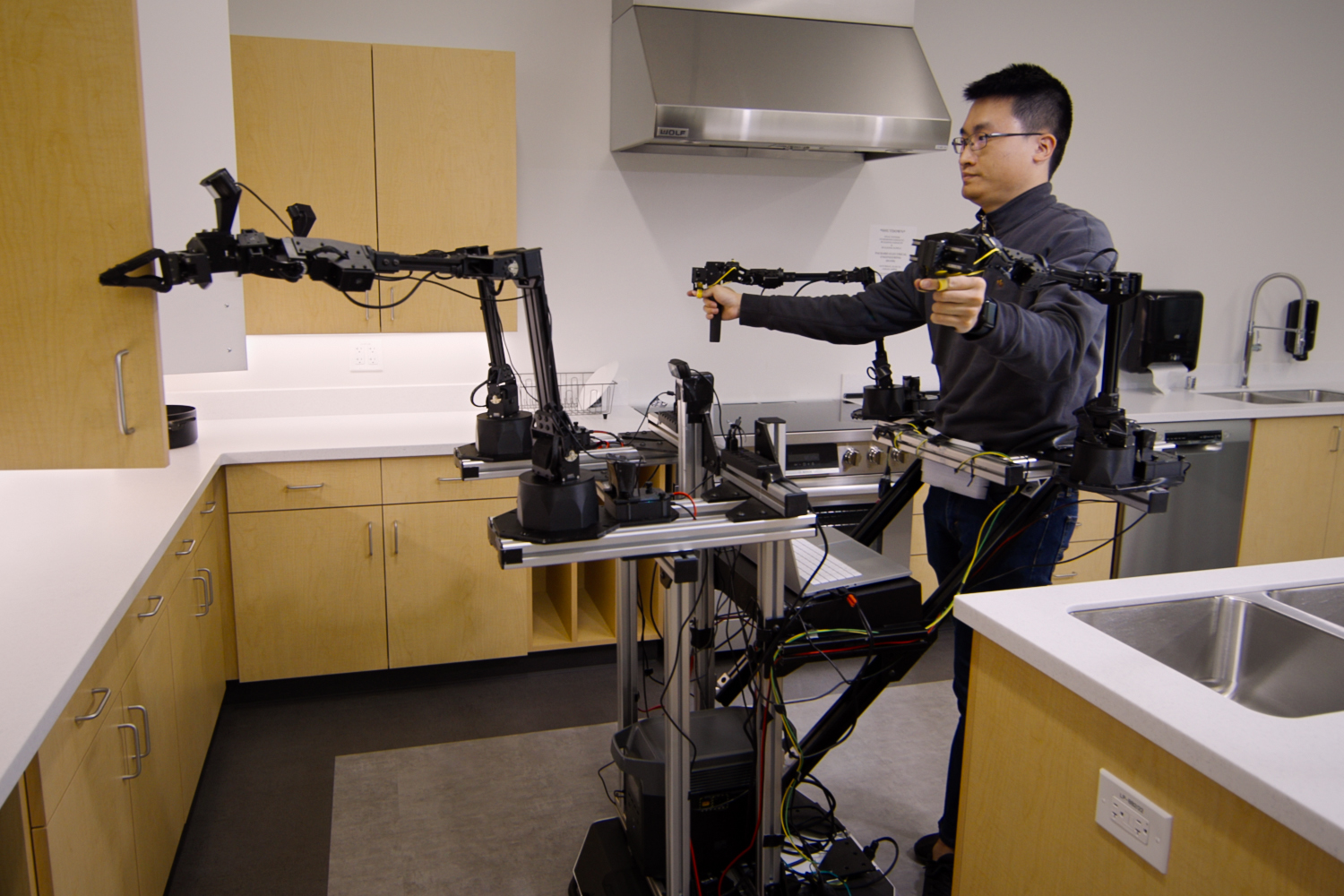
- 遠隔操作インターフェース:Mobile ALOHA の独自の特長は、全身遠隔操作システムです。操作者はロボットのベースに接続されたハーネスを装着し、ロボットの移動とアームの動作を同時に制御できます。この直感的なインターフェースにより、模倣学習向けの高品質なデータ収集が可能になります。
- オンボードの計算機とセンサー:本システムは高性能コンピューター(NVIDIA RTX 3070Ti)と、手首カメラや頭上カメラを含む複数のカメラを備え、作業中の視覚データを取得します。
ソフトウェアとアルゴリズム
Mobile ALOHA は高度な模倣学習アルゴリズムを活用して複雑なタスクを実行します。主なポイントは次のとおりです:
-
- 行動クローニング:本システムは教師あり学習を用いて人間のデモを模倣します。既存の静的 ALOHA データセットと併用して学習することで、Mobile ALOHA は料理や戸棚を開けるといったタスクで90%の成功率を達成します。
- ACT(Action Chunking with Transformers):このアルゴリズムにより、ロボットは短いデモ(わずか15分)から学習し、新しいタスクへ一般化できます。ACT のトランスフォーマーベースのアーキテクチャは、高次元データを効率的に扱えます。
- 共同学習:静的タスクとモバイルタスクのデータを組み合わせることで、ロボットの性能が向上します。例えば Mobile ALOHA は、エビを自律的に炒めたり、重い鍋を片づけたり、さらにはエレベーターを呼んで乗り込むこともできます。
実世界での応用
Mobile ALOHA はさまざまなシナリオでその汎用性を示してきました:
-
- 家事:ロボットは料理、掃除、片づけといった複雑な家事を行えます。例えば、エビを炒め、フライパンをすすぎ、重い鍋を戸棚に片づけられます。
- オフィス支援:Mobile ALOHA はオフィス環境を移動し、エレベーターを操作し、物の配達や作業スペースの整理といったタスクを支援できます。
- 産業利用:低コスト(約 $32,000)とモジュール式設計により、倉庫物流や組立ラインの作業などの産業用途に適しています。
課題と今後の方向性
Mobile ALOHA は目覚ましい成功を収めてきましたが、課題も残っています:
-
- 一般化:現在、本システムはタスクごとのデモを必要とします。今後の研究では、最小限の追加学習でタスク間を一般化する能力の向上を目指します。
- 頑健性:動的で非構造的な環境に対処する能力の強化が重点領域です。
- コスト削減:システムのコストをさらに下げることで、より広く普及しやすくなります。
まとめ
Mobile ALOHA は、低コストのハードウェアと最先端の模倣学習アルゴリズムを組み合わせた、画期的な進歩を示すものです。複雑なモバイル操作タスクを実行できる能力は、家庭・産業・商業の現場におけるロボティクスの新たな可能性を切り開きます。研究が進むにつれ、Mobile ALOHA は次世代ロボットシステムの基盤となる存在になるでしょう。
学習に必要なデモって何回くらい集めればそれっぽく動きます?
タスクの複雑さ次第ですが、簡単な動作なら50回前後のデモで実用的なポリシーが得られます。
まさに知りたかったことです。
両腕協調の制御が一番むずかしそうだけどこれ既存のサーボ構成でどこまで再現できるんだろう自作勢としては部品コストが気になる全部揃えるといくらくらいになるのか
オープンソースで全部公開されてるのが本当に偉い
テレオペの遅延ってどのくらいありますか実際
ローカル接続なら数十ミリ秒程度で、人手の操作では遅延はほとんど気になりません。
Mobile ALOHA、初めて見たとき衝撃だった!!! 低コストでここまでできるのほんとすごい
模倣学習のデータ収集って大変そう。
移動ベースの自己位置推定って何使ってますか
オリジナルはホイールオドメトリ中心で、必要に応じて外部センサを追加する構成です。屋内タスクなら十分な精度が出ます。
家事タスクを学習させるってロマンあるよなぁうちの皿洗いも任せたい正直w