Mobile ALOHA:开源家务机器人
 4554
4554
引言
Mobile ALOHA 项目由斯坦福大学团队与 Boston Dynamics AI Institute 合作开发,代表了机器人技术的重大飞跃。它通过引入一种低成本的全身遥操作系统,解决了传统桌面式操作系统的局限,能够完成复杂的移动操作任务。本文探讨 Mobile ALOHA 的硬件设计、软件算法与实际应用,重点介绍其在家庭和工业场景中变革机器人技术的潜力。
硬件设计
Mobile ALOHA 将一个模块化的双臂机器人与移动底盘相结合,使其能够完成同时需要移动性和灵巧性的任务。关键组件包括:
-
- 双臂机器人:系统采用 ALOHA 机器人,配备两条带平行夹爪的 6 自由度机械臂。这些机械臂在设计上兼顾灵活性与易于维护,非常适合烹饪和清洁等复杂任务。
- 移动底盘:机器人安装在 Mecanum 轮底盘上,使其能够以人类步行速度(约 1.42 m/s)移动。该底盘提供稳定性和机动性,让机器人能够在室内环境中高效导航。
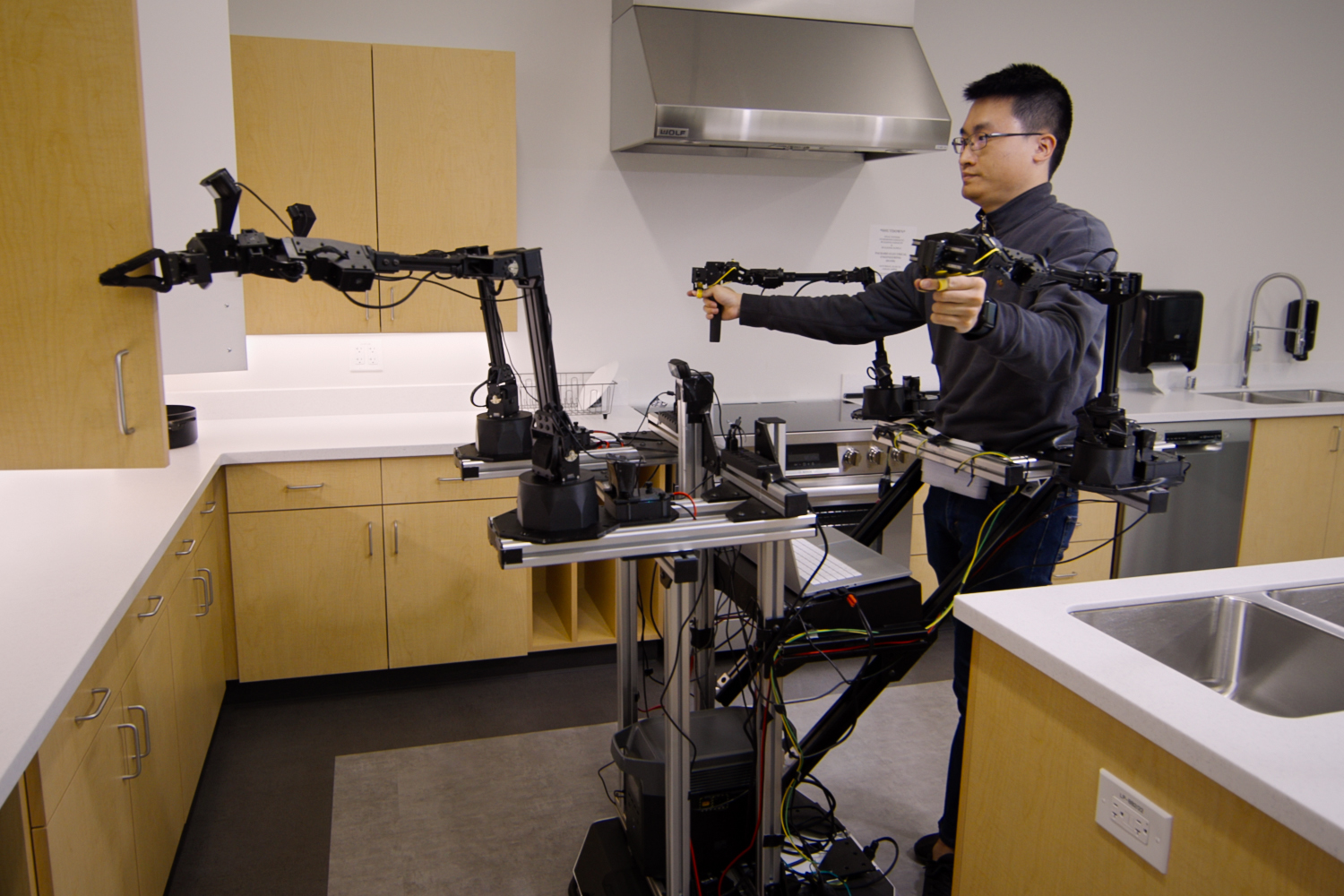
- 遥操作接口:Mobile ALOHA 的一大独特之处在于其全身遥操作系统。操作者穿戴与机器人底盘相连的背带,从而能够同时控制机器人的移动和机械臂的动作。这种直观的接口确保为模仿学习采集到高质量的数据。
- 车载计算与传感器:系统配备一台高性能计算机(NVIDIA RTX 3070Ti)和多个相机,包括腕部相机和顶部相机,用于在操作过程中采集视觉数据。
软件与算法
Mobile ALOHA 借助先进的模仿学习算法来完成复杂任务。关键方面包括:
-
- 行为克隆:系统采用监督学习来模仿人类示范。通过与现有的静态 ALOHA 数据集联合训练,Mobile ALOHA 在烹饪和开柜门等任务中达到了 90% 的成功率。
- ACT(Action Chunking with Transformers):该算法使机器人能够从简短的示范(最短仅需 15 分钟)中学习,并泛化到新任务。ACT 基于 Transformer 的架构使其能够高效处理高维数据。
- 联合训练:结合静态任务与移动任务的数据可提升机器人的表现。例如,Mobile ALOHA 能够自主煎炒虾仁、收纳沉重的锅具,甚至呼叫电梯并进入电梯。
实际应用
Mobile ALOHA 在各种场景中展现了它的多功能性:
-
- 家务任务:机器人能够完成烹饪、清洁和整理等复杂家务。例如,它可以煎炒虾仁、冲洗锅具,并将沉重的锅具收纳进橱柜。
- 办公协助:Mobile ALOHA 能够在办公环境中导航、与电梯交互,并协助完成诸如递送物品或整理工作区等任务。
- 工业应用:其低廉的成本(约 $32,000)和模块化设计使它适用于仓储物流和装配线作业等工业场景。
挑战与未来方向
尽管 Mobile ALOHA 已取得显著成功,但挑战依然存在:
-
- 泛化能力:目前系统需要针对具体任务的示范。未来的工作旨在提升其以最少额外训练在不同任务间泛化的能力。
- 鲁棒性:增强机器人应对动态和非结构化环境的能力是一个重点方向。
- 降低成本:进一步降低系统成本将使其更易于广泛采用。
结论
Mobile ALOHA 是机器人技术上的一项开创性进展,它将低成本硬件与前沿的模仿学习算法相结合。它执行复杂移动操作任务的能力,为家庭、工业和商业场景中的机器人技术开辟了新的可能。随着研究的持续推进,Mobile ALOHA 有望成为下一代机器人系统的基石。
这个项目最大的意义在于它证明了不一定非要几十万的工业机器人才能做移动操作研究 一套几万块的开源方案就能让更多高校和个人参与进来 把整个领域的门槛拉低了 这种推动作用比单个技术指标重要得多 期待社区在它基础上做出更多迭代
想问下这个移动底盘是自己做的还是用现成的 我想复现但是底盘这块没头绪
官方用的是改装的现成移动底盘加自制支架。如果你要复现,建议直接用成熟的差速或全向底盘平台,把精力放在上面双臂和学习部分,底盘自研性价比不高。
现在清楚了,谢谢。
看着很酷 但是真的实用吗 演示视频里叠衣服炒菜 实际成功率有多少
演示任务的成功率在受控环境下不错,但泛化到全新场景仍是难点。它的价值更多在于提供了一套低成本、可复现的双臂移动操作平台和数据采集范式,离稳定的家用还有距离。
双臂协同。遥操作直观。学习曲线陡。
膜拜大佬 这种开源精神值得点赞!!!
模仿学习那部分太硬核了 数据采集靠遥操作这个思路绝了
Mobile ALOHA 真的是开源机器人的里程碑 让低成本双臂操作成为可能 yyds
请问复现这套要多少预算 网上说三万多人民币 实际自己搭下来差不多吗
官方BOM大约是三万多人民币这个量级。实际自搭如果国内采购零件、自己打印结构件,能省一些,但移动底盘和上位机算力是大头,总价很难压到太低。