Mobile ALOHA : robot domestique open source
 4333
4333
Introduction
Le projet Mobile ALOHA, développé par une équipe de l’Université de Stanford en collaboration avec le Boston Dynamics AI Institute, représente une avancée majeure en robotique. Il dépasse les limites des systèmes de manipulation de table classiques en introduisant un système de téléopération du corps entier à faible coût, capable d’exécuter des tâches complexes de manipulation mobile. Cet article explore la conception matérielle, les algorithmes logiciels et les applications réelles de Mobile ALOHA, en soulignant son potentiel pour transformer la robotique dans les environnements domestiques et industriels.
Conception matérielle
Mobile ALOHA associe un robot bimanuel modulaire à une base mobile, ce qui lui permet d’exécuter des tâches exigeant à la fois mobilité et dextérité. Les composants clés sont les suivants :
-
- Robot bimanuel : le système utilise le robot ALOHA, doté de deux bras à 6 degrés de liberté équipés de pinces parallèles. Ces bras sont conçus pour la flexibilité et la facilité d’entretien, ce qui les rend idéaux pour des tâches complexes comme la cuisine et le ménage.
- Base mobile : le robot est monté sur une base à roues Mecanum, ce qui lui permet de se déplacer à la vitesse de marche d’un humain (environ 1,42 m/s). Cette base offre stabilité et maniabilité, permettant au robot de circuler efficacement en intérieur.
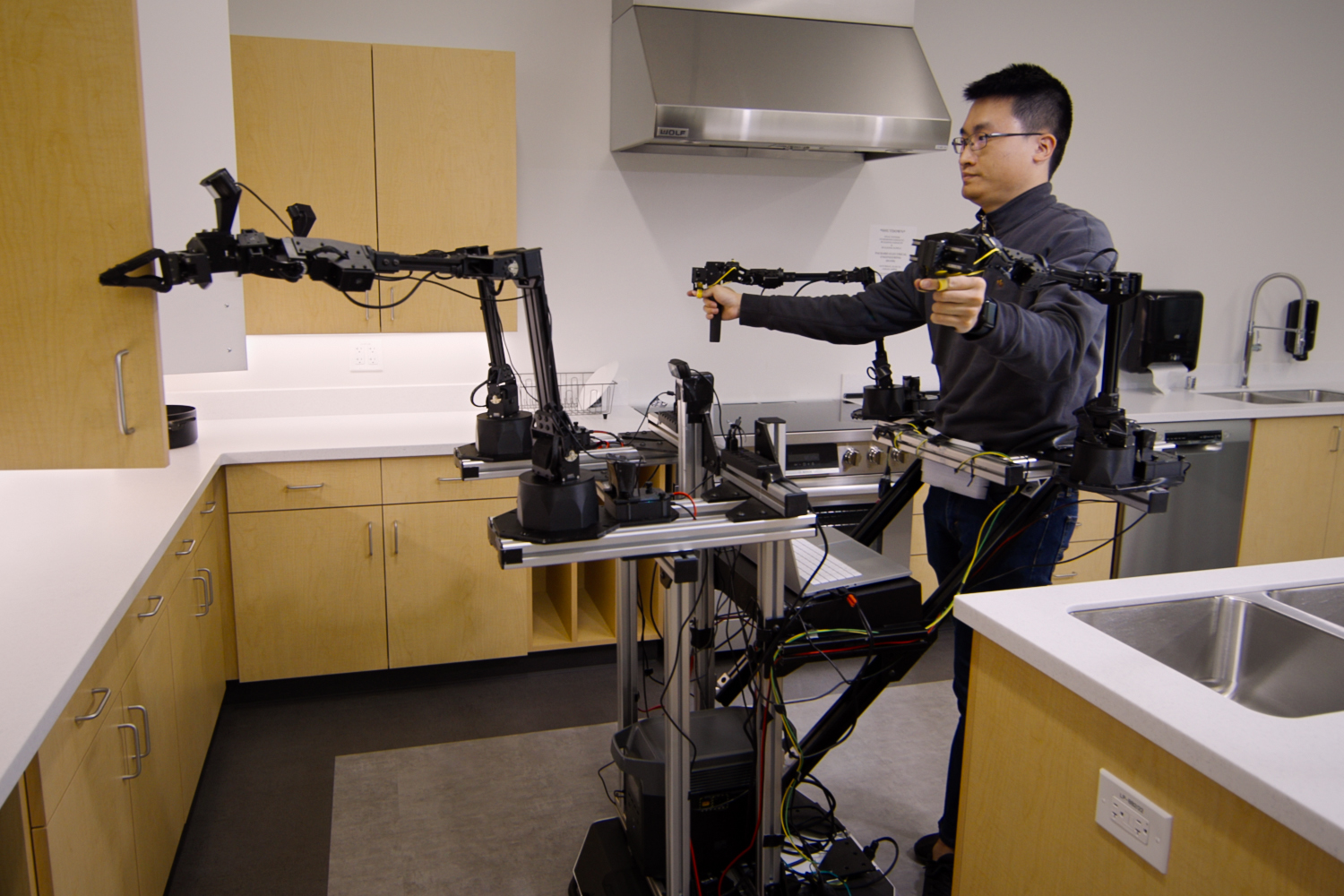
- Interface de téléopération : une caractéristique unique de Mobile ALOHA est son système de téléopération du corps entier. L’opérateur porte un harnais relié à la base du robot, ce qui lui permet de commander simultanément les déplacements du robot et les actions des bras. Cette interface intuitive assure une collecte de données de grande qualité pour l’apprentissage par imitation.
- Calcul embarqué et capteurs : le système est équipé d’un ordinateur performant (NVIDIA RTX 3070Ti) et de plusieurs caméras, dont des caméras au poignet et une caméra en hauteur, pour capturer les données visuelles pendant les opérations.
Logiciel et algorithmes
Mobile ALOHA s’appuie sur des algorithmes avancés d’apprentissage par imitation pour exécuter des tâches complexes. Les aspects clés sont les suivants :
-
- Clonage de comportement : le système utilise l’apprentissage supervisé pour reproduire les démonstrations humaines. Grâce à un entraînement conjoint avec les jeux de données ALOHA statiques existants, Mobile ALOHA atteint un taux de réussite de 90 % dans des tâches comme la cuisine et l’ouverture de placards.
- ACT (Action Chunking with Transformers) : cet algorithme permet au robot d’apprendre à partir de courtes démonstrations (à peine 15 minutes) et de généraliser à de nouvelles tâches. L’architecture d’ACT, fondée sur les transformeurs, lui permet de traiter efficacement des données de grande dimension.
- Entraînement conjoint : combiner les données des tâches statiques et mobiles améliore les performances du robot. Par exemple, Mobile ALOHA peut faire revenir des crevettes de façon autonome, ranger de lourdes casseroles et même appeler un ascenseur et y entrer.
Applications concrètes
Mobile ALOHA a démontré sa polyvalence dans divers scénarios :
-
- Tâches ménagères : le robot peut accomplir des corvées complexes comme la cuisine, le ménage et le rangement. Par exemple, il fait revenir des crevettes, rince les poêles et range de lourdes casseroles dans les placards.
- Assistance au bureau : Mobile ALOHA peut se déplacer dans les environnements de bureau, interagir avec les ascenseurs et aider à des tâches comme la livraison d’objets ou l’organisation des espaces de travail.
- Usage industriel : son faible coût (environ 32 000 $) et sa conception modulaire le rendent adapté aux applications industrielles, comme la logistique d’entrepôt et les tâches sur chaîne de montage.
Défis et perspectives
Bien que Mobile ALOHA ait obtenu des résultats remarquables, des défis subsistent :
-
- Généralisation : le système nécessite actuellement des démonstrations propres à chaque tâche. Les travaux futurs visent à améliorer sa capacité à généraliser entre les tâches avec un réentraînement minimal.
- Robustesse : renforcer la capacité du robot à évoluer dans des environnements dynamiques et non structurés est un axe de travail majeur.
- Réduction des coûts : réduire davantage le coût du système le rendra plus accessible pour une adoption à grande échelle.
Conclusion
Mobile ALOHA représente une avancée révolutionnaire en robotique, alliant un matériel à faible coût à des algorithmes d’apprentissage par imitation de pointe. Sa capacité à exécuter des tâches complexes de manipulation mobile ouvre de nouvelles possibilités pour la robotique dans les environnements domestiques, industriels et commerciaux. À mesure que la recherche se poursuit, Mobile ALOHA a toutes les chances de devenir une pierre angulaire des systèmes robotiques de nouvelle génération.
Projet fascinant. Ce qui est remarquable c’est moins la prouesse matérielle que la démonstration qu’on peut faire de la manipulation mobile généraliste sans budget de labo. Ça redéfinit ce qui est accessible à un petit groupe ou même un individu motivé.
l’apprentissage par imitation avec si peu de démonstrations c’est ce qui m’épate le plus
mobile aloha c’est le projet qui m’a donné envie de me lancer dans la manipulation, dingue ce qu’ils ont fait pour le prix
vous comptez sortir un guide pour reproduire la téléopération bimanuelle ? ça m’intéresse vraiment
C’est dans nos cartons. On veut documenter une version basée sur nos servos bus série pour réduire encore le coût d’entrée. Pas de date ferme, mais restez à l’écoute du blog.
combien ça revient en gros à reproduire un setup aloha aujourd’hui ?
En reproduisant fidèlement le BOM original, l’essentiel du budget part dans la base mobile et les bras. En substituant des servos bus série et une base maison, on pense pouvoir descendre nettement plus bas, ce qu’on explorera dans un futur article.
Merci pour la réponse détaillée.
est-ce que vos servos seraient assez précis pour ce genre de tâches de manipulation fine ?
Pour de la manipulation guidée par apprentissage, oui — la politique compense une partie des imperfections du matériel. Le retour de position de nos servos bus série, avec leur encodeur 12 bits (0,088° par pas), suffit pour collecter des démonstrations propres ; c’est justement ce qu’on veut montrer.
sa marche vraiment bien pour les taches menageres ou c’est surtout des demos bien choisies ?
le coté open source de tout le pipeline c’est ce qui change tout, on peut vraiment reproduire et améliorer