Mobile ALOHA: robot doméstico de código abierto
 4305
4305
Introducción
El proyecto Mobile ALOHA, desarrollado por un equipo de la Universidad de Stanford en colaboración con el Boston Dynamics AI Institute, representa un avance significativo en robótica. Aborda las limitaciones de los sistemas de manipulación de sobremesa tradicionales al introducir un sistema de teleoperación de cuerpo completo y bajo coste, capaz de realizar tareas complejas de manipulación móvil. Este artículo explora el diseño del hardware, los algoritmos de software y las aplicaciones reales de Mobile ALOHA, y destaca su potencial para transformar la robótica en entornos domésticos e industriales.
Diseño del hardware
Mobile ALOHA combina un robot bimanual y modular con una base móvil, lo que le permite realizar tareas que requieren a la vez movilidad y destreza. Sus componentes clave incluyen:
-
- Robot bimanual: el sistema utiliza el robot ALOHA, que cuenta con dos brazos de 6 grados de libertad con pinzas paralelas. Estos brazos están diseñados para ofrecer flexibilidad y facilidad de mantenimiento, lo que los hace ideales para tareas complejas como cocinar y limpiar.
- Base móvil: el robot está montado sobre una base con ruedas Mecanum, lo que le permite moverse a velocidad de marcha humana (aproximadamente 1,42 m/s). Esta base aporta estabilidad y maniobrabilidad, permitiendo al robot desplazarse eficazmente por entornos interiores.
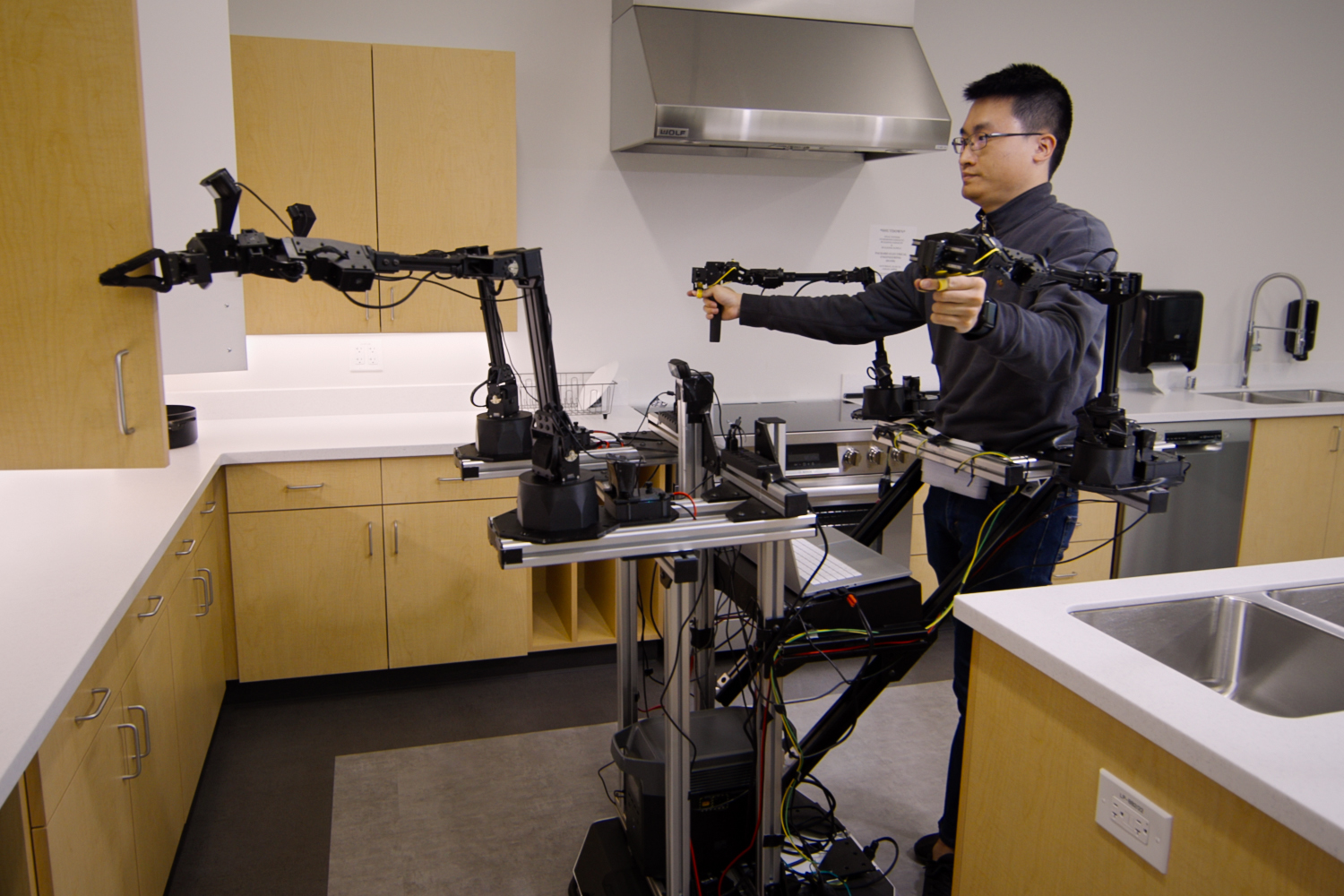
- Interfaz de teleoperación: una característica única de Mobile ALOHA es su sistema de teleoperación de cuerpo completo. Los operadores llevan un arnés conectado a la base del robot, lo que les permite controlar simultáneamente el movimiento del robot y las acciones de los brazos. Esta interfaz intuitiva garantiza una recopilación de datos de alta calidad para el aprendizaje por imitación.
- Computación y sensores a bordo: el sistema está equipado con un ordenador de alto rendimiento (NVIDIA RTX 3070Ti) y varias cámaras, incluidas cámaras en las muñecas y una cámara cenital, para capturar datos visuales durante las operaciones.
Software y algoritmos
Mobile ALOHA aprovecha algoritmos avanzados de aprendizaje por imitación para realizar tareas complejas. Sus aspectos clave incluyen:
-
- Clonación de comportamiento: el sistema utiliza aprendizaje supervisado para imitar las demostraciones humanas. Mediante el entrenamiento conjunto con los conjuntos de datos estáticos existentes de ALOHA, Mobile ALOHA alcanza una tasa de éxito del 90 % en tareas como cocinar y abrir armarios.
- ACT (Action Chunking with Transformers): este algoritmo permite al robot aprender a partir de demostraciones cortas (de tan solo 15 minutos) y generalizar a nuevas tareas. La arquitectura de ACT, basada en transformadores, le permite manejar datos de alta dimensión de forma eficiente.
- Entrenamiento conjunto: combinar datos de tareas estáticas y móviles mejora el rendimiento del robot. Por ejemplo, Mobile ALOHA puede saltear gambas de forma autónoma, guardar ollas pesadas e incluso llamar al ascensor y entrar en él.
Aplicaciones en el mundo real
Mobile ALOHA ha demostrado su versatilidad en diversos escenarios:
-
- Tareas domésticas: el robot puede realizar tareas complejas como cocinar, limpiar y ordenar. Por ejemplo, puede saltear gambas, enjuagar sartenes y guardar ollas pesadas en los armarios.
- Asistencia en la oficina: Mobile ALOHA puede desplazarse por entornos de oficina, interactuar con ascensores y ayudar en tareas como entregar objetos u organizar espacios de trabajo.
- Uso industrial: su bajo coste (aproximadamente 32 000 $) y su diseño modular lo hacen adecuado para aplicaciones industriales, como la logística de almacenes y las tareas en líneas de montaje.
Retos y direcciones futuras
Aunque Mobile ALOHA ha logrado un éxito notable, siguen existiendo retos:
-
- Generalización: actualmente el sistema requiere demostraciones específicas para cada tarea. El trabajo futuro pretende mejorar su capacidad de generalizar entre tareas con un entrenamiento adicional mínimo.
- Robustez: mejorar la capacidad del robot para desenvolverse en entornos dinámicos y no estructurados es un área clave.
- Reducción de costes: reducir aún más el coste del sistema lo hará más accesible para una adopción generalizada.
Conclusión
Mobile ALOHA representa un avance pionero en robótica, combinando hardware de bajo coste con algoritmos de vanguardia de aprendizaje por imitación. Su capacidad para realizar tareas complejas de manipulación móvil abre nuevas posibilidades para la robótica en entornos domésticos, industriales y comerciales. A medida que avanza la investigación, Mobile ALOHA está llamada a convertirse en una piedra angular de los sistemas robóticos de próxima generación.
lo de doblar la ropa con imitation learning me dejo flipando la verdad
Lo que me parece más relevante de Mobile ALOHA no es tanto el robot en sí como lo que representa: demuestra que con hardware accesible y teleoperación bimanual puedes recoger datos de calidad suficiente para que el aprendizaje por imitación resuelva tareas domésticas reales, y eso hace apenas unos años parecía territorio exclusivo de laboratorios con presupuestos enormes. El hecho de que todo, hardware y datos, se haya liberado cambia por completo a quién está al alcance investigar en manipulación. Mi única reserva es la fiabilidad fuera de las condiciones de las demos, que sigue siendo el gran reto pendiente, pero como plataforma de aprendizaje y experimentación me parece sencillamente brillante.
He montado un clon de ALOHA con el equipo del laboratorio y aunque el camino tiene sus baches el resultado merece muchísimo la pena para enseñar aprendizaje por imitación a los estudiantes. Lo más laborioso no fue el hardware sino afinar la captura de las demostraciones para que fueran consistentes. Un proyecto que ha democratizado de verdad la manipulación móvil.
el hardware es abierto pero el dataset de entrenamiento tambien lo es? eso es lo que de verdad cuesta generar
Sí, parte del valor del proyecto es que tanto el hardware como los datos de demostración se publicaron abiertamente, y eso es justo lo más costoso de generar. Puedes partir de ese dataset y ampliarlo con tus propias tareas.
Justo lo que necesitaba.
el coste sigue siendo alto para hobby pero comparado con lo industrial es regaladisimo
se puede replicar con servos de bus serie mas baratos o pierde precision la teleoperacion?
Se puede replicar con servos de bus serie de menor coste; la clave es que el brazo líder y el seguidor usen el mismo modelo para que el mapeo sea limpio. Pierdes algo de suavidad frente a actuadores premium, pero para aprender por imitación es perfectamente válido.
¡Gracias, ahora lo entiendo!
Mobile ALOHA es de lo más impresionante que ha salido en código abierto.
¿cuántas demostraciones de teleoperación hacen falta para que aprenda una tarea decente?
Suelen bastar unas pocas decenas de demostraciones por tarea para resultados razonables, mientras que las tareas más complejas o con más variabilidad requieren bastantes más. La calidad y consistencia de las demos importa tanto como la cantidad.
Tiene sentido, gracias.