Construyendo un brazo de código abierto. La pinza
 12778
12778
Quiero compartir algunos detalles sobre cómo avanza el desarrollo de nuestro manipulador asequible. Ahora mismo, nos estamos preparando activamente para la fase de montaje del primer prototipo del brazo robótico.
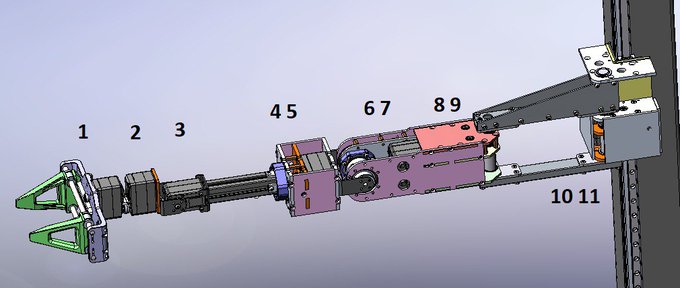
Brazo robótico de 7 grados de libertad
Nos hemos fijado un objetivo bastante ambicioso: alcanzar especificaciones comparables a las de los principales manipuladores de nivel de investigación: 650 mm de longitud, 7 grados de libertad, capacidad de carga de hasta 3 kg y precisión de posicionamiento dentro de 1 mm. Todos los archivos fuente y desarrollos se publicarán de forma abierta —o casi todos, según el nivel de apoyo que recibamos de la comunidad de robótica—.
Qué es una pinza
Lo primero que estamos listos para compartir es la pinza.
Descripción: Una pinza es un dispositivo mecánico o robótico diseñado para agarrar, sujetar, manipular o transportar objetos. Actúa como la «mano» o efector final de un brazo robótico o sistema de automatización, permitiendo que el robot interactúe con el mundo físico al sujetar y soltar objetos.
La pinza está disponible como código abierto en GitHub.
Consideramos muchas opciones de diseño para la pinza y finalmente elegimos un mecanismo de mordazas paralelas. Los criterios que usamos para seleccionar el diseño fueron:
- Sencillez de construcción
- Capacidad de agarrar objetos redondos
- Capacidad de recoger objetos planos de una mesa
- Uso mínimo de servos
- Coste y fiabilidad del diseño
Pinza giratoria de una sola mordaza
Probablemente uno de los diseños de pinza más sencillos que encontramos —la pinza giratoria de una sola mordaza— es una configuración en la que una mordaza es fija y la otra se monta directamente en el eje de un servomotor.
Pinza giratoria de una sola mordaza (vista 3D)
- La desventaja de esta solución es que el borde frontal de la mordaza móvil describe un arco. Por tanto, si necesitamos agarrar un objeto pequeño con las puntas de la pinza, debemos tener en cuenta que el objeto debe situarse a lo largo de esa trayectoria en arco durante el cierre.
- Un segundo inconveniente es que, como solo se mueve una mordaza, el ancho máximo del objeto que se puede agarrar está limitado por el recorrido de esa única mordaza móvil. Para agarrar el mismo volumen que una pinza paralela, las mordazas deben ser bastante más largas.
Comparación de la longitud de las mordazas. Pinza giratoria de una sola mordaza frente a pinza paralela
- El tercer inconveniente es que este tipo de pinza es asimétrico, lo que significa que el centro de masa siempre está desplazado hacia el lado móvil.
Teniendo en cuenta todos estos inconvenientes de la pinza giratoria de una sola mordaza, decidimos explorar en su lugar diseños de pinza paralela simétrica.
Pinza paralela de cuadrilátero articulado frente a pinza paralela
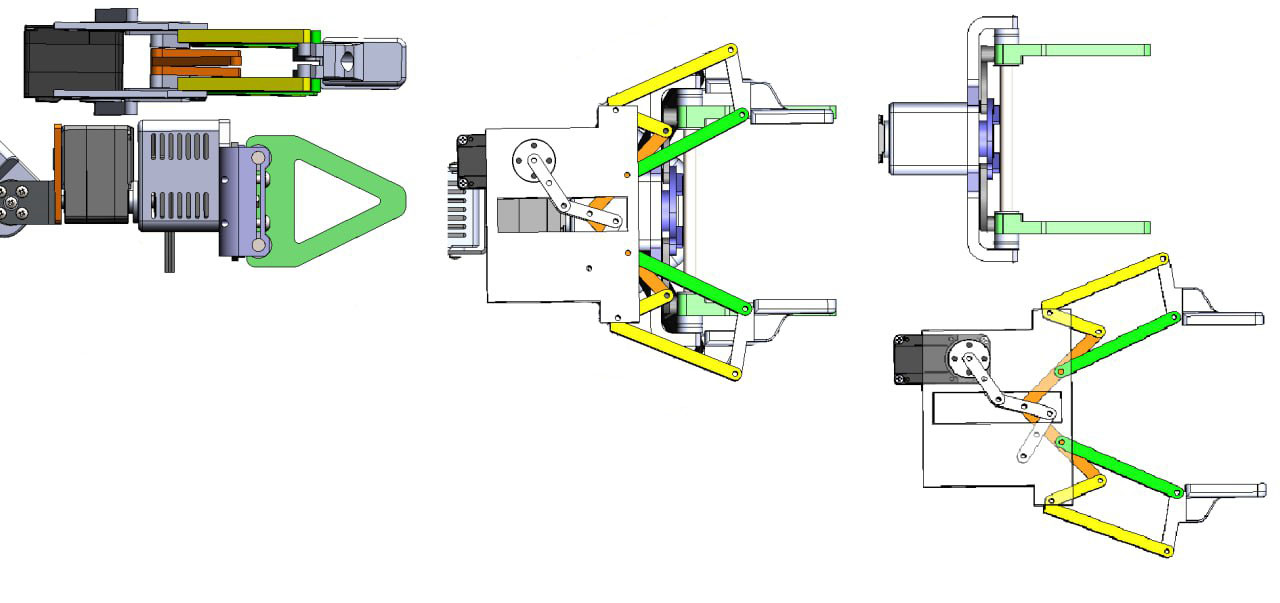
Pinza paralela de cuadrilátero articulado frente a pinza paralela
La imagen anterior muestra dos versiones de una pinza de mordazas paralelas con un solo servomotor. La pinza paralela de cuadrilátero articulado, en la que las mordazas se abren en ángulo, resulta notablemente más compleja en cuanto al número de piezas y al tamaño total.
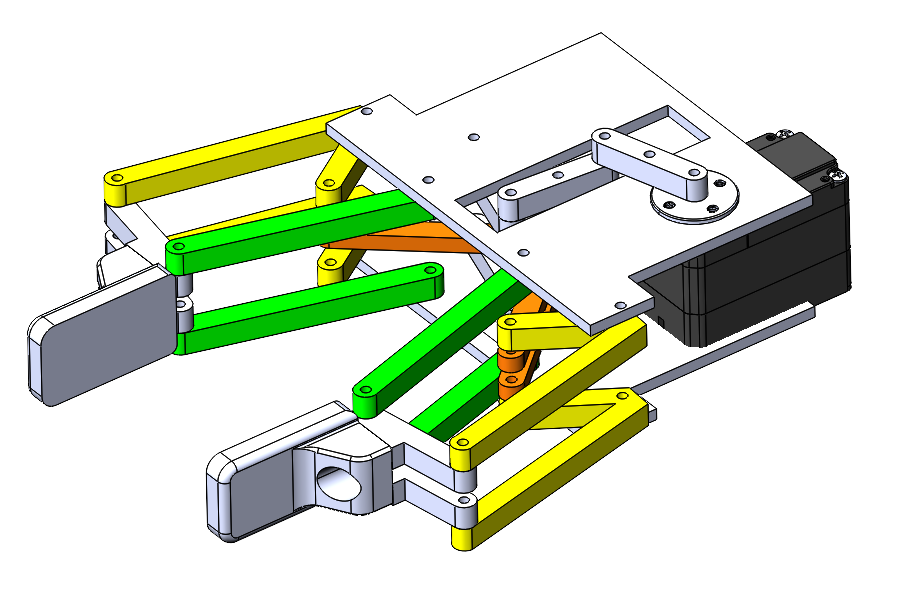
Podríamos haber seguido optimizando ese diseño, pero decidimos que una pinza paralela es más sencilla de montar y, por tanto, también más barata de fabricar.
Mecanismo de manivela-balancín
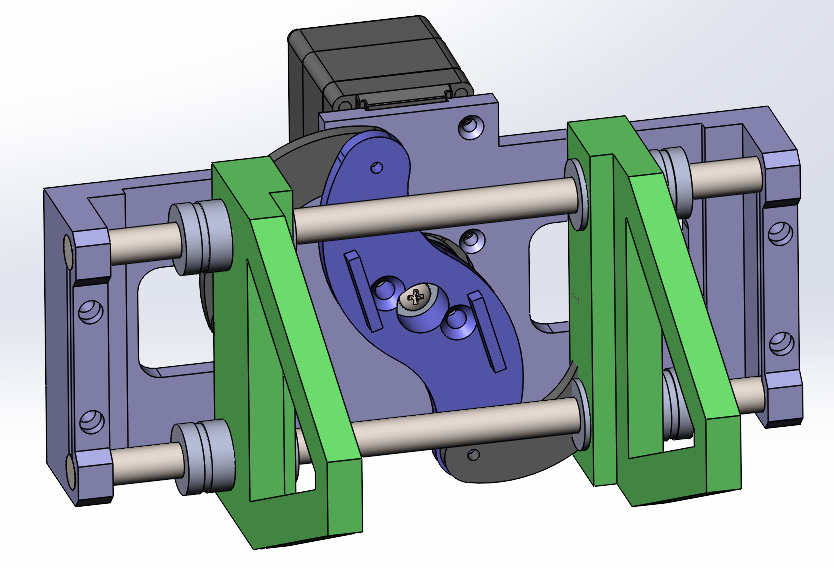
Mecanismo de manivela-balancín
La siguiente cuestión importante fue la elección del mecanismo de deslizamiento. La primera opción propuesta por el ingeniero fue el mecanismo de manivela-balancín. Un inconveniente importante de este diseño de pinza es su altura. Si las mordazas son más cortas que la altura del mecanismo de deslizamiento, la parte inferior obstruirá la recogida de objetos de superficies planas, limitando la capacidad de agarrar objetos especialmente planos. Si hacemos las mordazas más altas para compensar, la pinza se vuelve bastante voluminosa.
Por eso pasamos a considerar el mecanismo de pinza de piñón y cremallera.
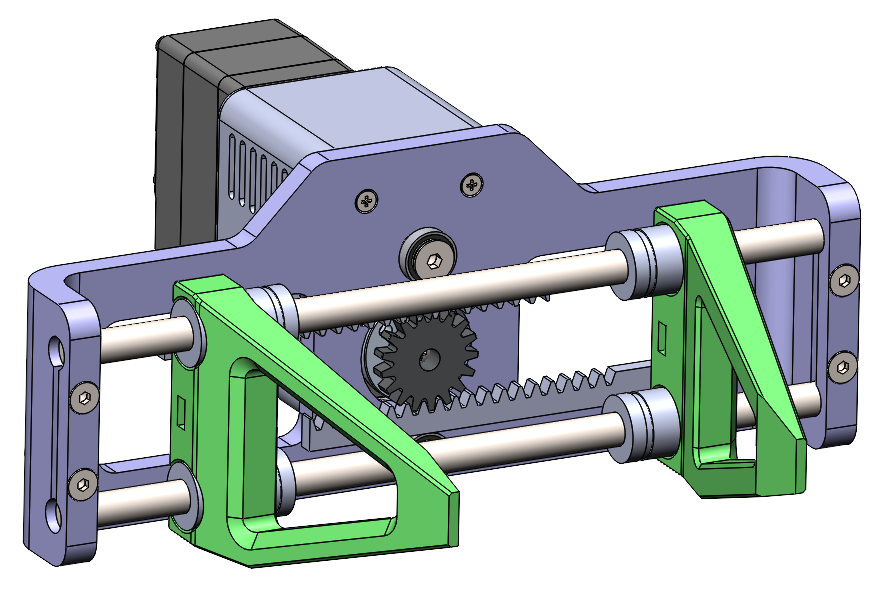
Mecanismo de pinza de piñón y cremallera
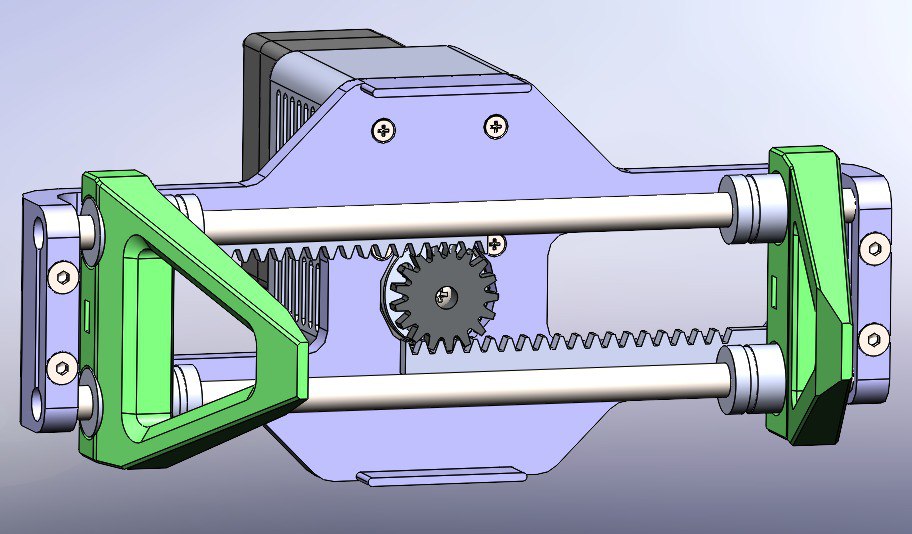
Mecanismo de pinza de piñón y cremallera. Versión 1
En esta imagen, sustituimos el balancín por un mecanismo de cremallera. También se ve cuánto espacio libre se ganó en comparación con la versión anterior.
En la siguiente fase, el ingeniero añadió topes y redujo la altura del conjunto.
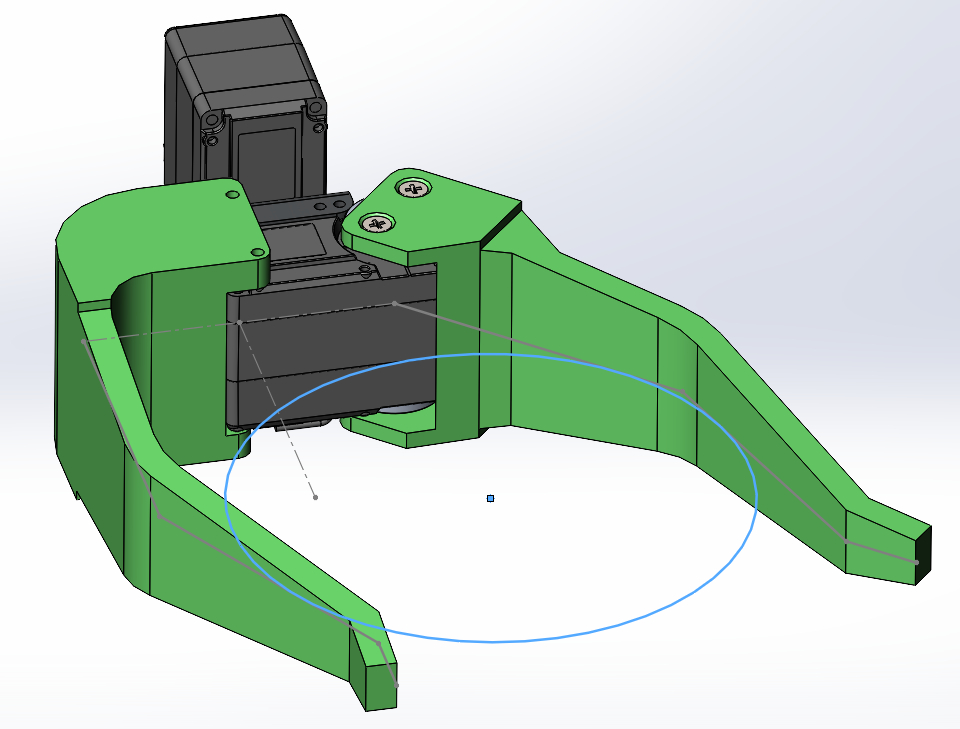
Mecanismo de pinza de piñón y cremallera. Versión 2
Uno de los inconvenientes que quedan del diseño actual son las llamadas «orejas»: cuando el brazo necesita acceder a espacios relativamente estrechos, estas prolongaciones pueden limitar notablemente la maniobrabilidad. Esto también puede ser un problema al trabajar cerca de superficies planas si la pinza necesita girar sobre su eje.
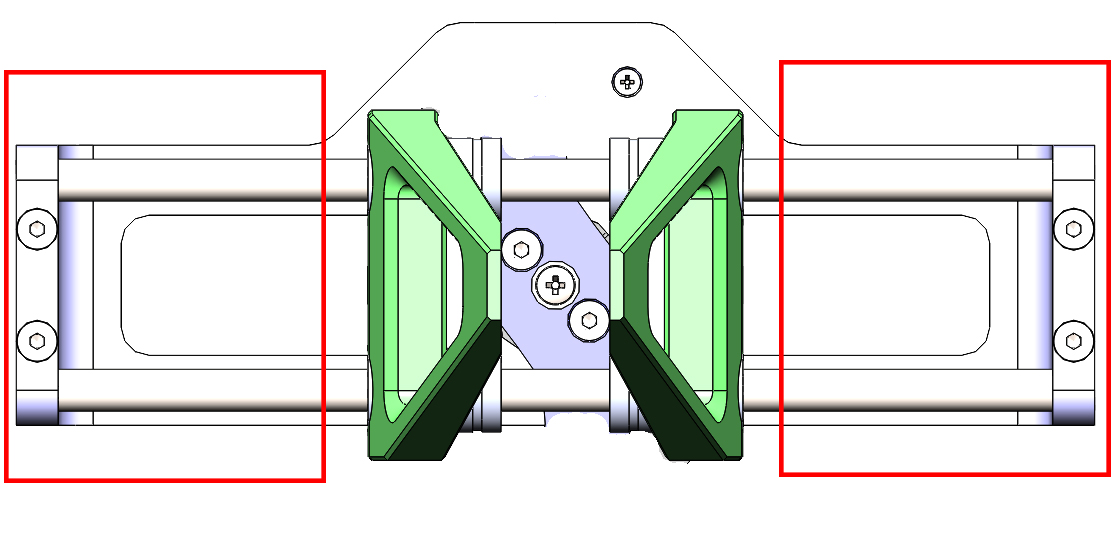
Las «orejas» de la pinza
Cámara de profundidad
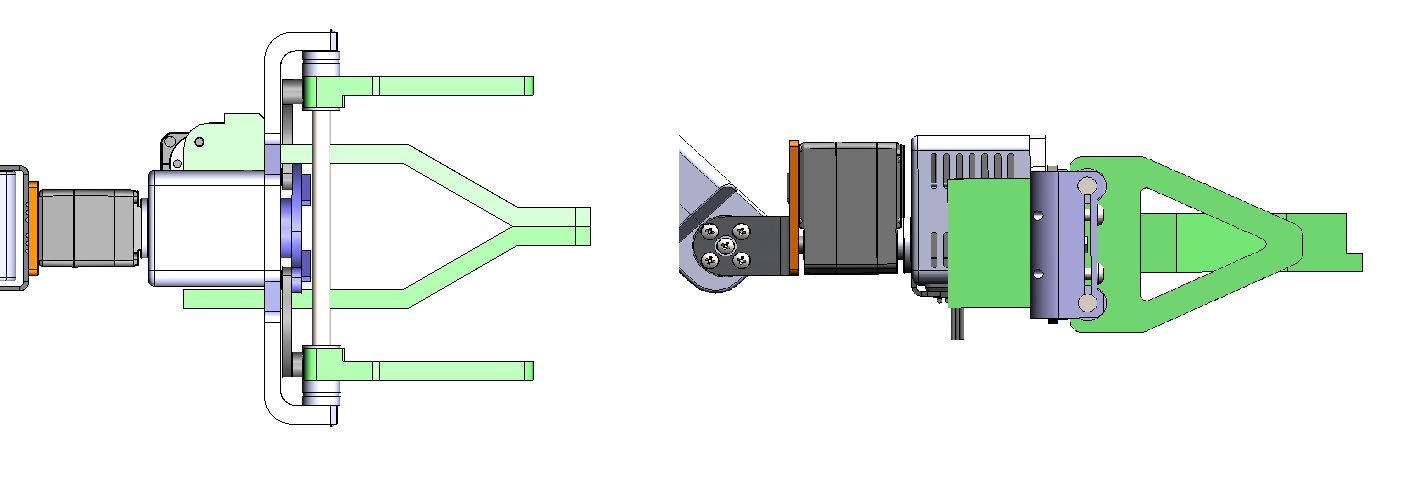
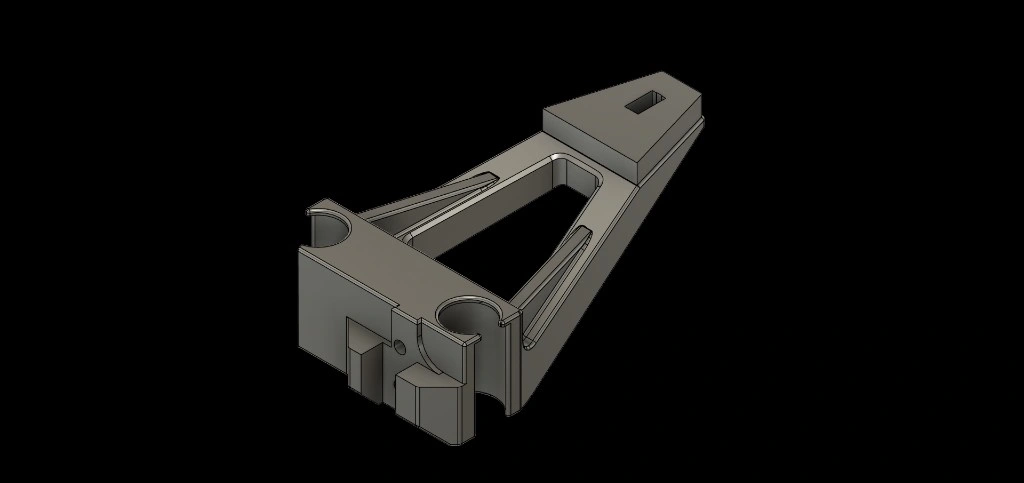
La pinza se usa en combinación con una cámara de profundidad y, en la siguiente fase, se añadió una placa de montaje para fijar la cámara.
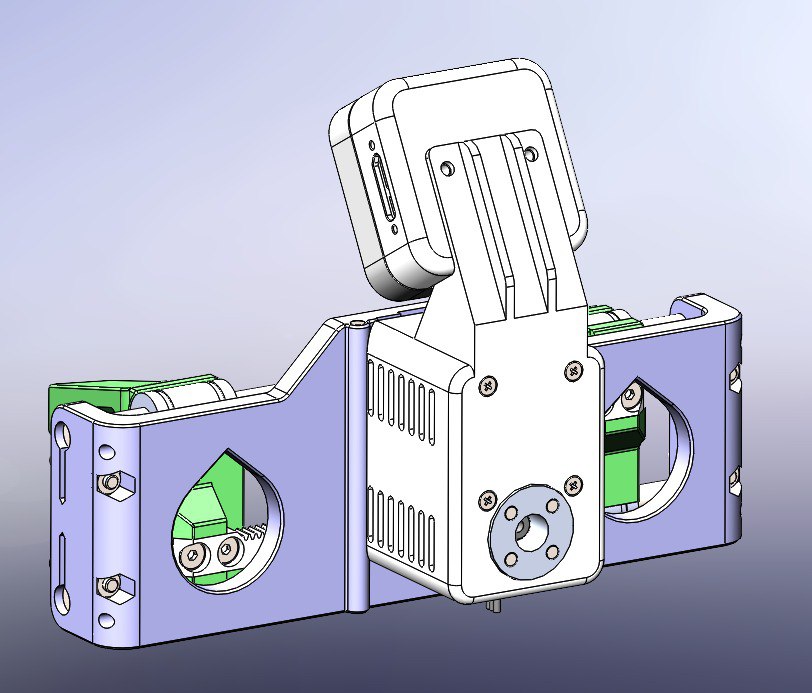
Soporte de la cámara de profundidad
La cámara se coloca en un ángulo de 45 grados para lograr el campo de visión de trabajo más amplio posible. La utiliza un modelo de control basado en aprendizaje automático para determinar con precisión las dimensiones del objeto que se va a agarrar, la fuerza de agarre necesaria y la apertura de mordazas requerida. Es el único sensor instalado en la pinza.
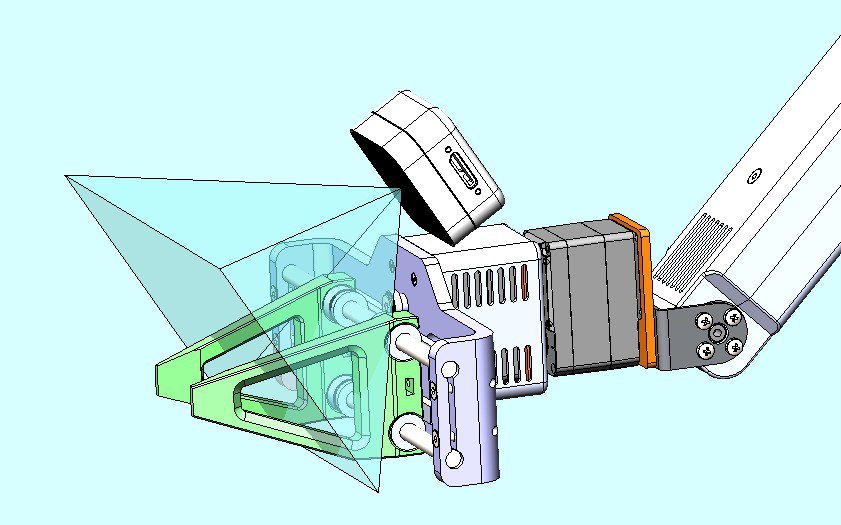
Ángulo de visión de la cámara de profundidad
En este punto, hemos pausado el trabajo de diseño y pasamos a montar el prototipo para detectar cualquier problema práctico del diseño actual. Algunos de los componentes se pidieron en AliExpress.
Lista de materiales
Componentes electrónicos
| Artículo | Descripción | Cant. | Enlace del proveedor | Precio | Notas |
| ST3215 Servo | Waveshare Servo Motor STS3215 | 1 | Amazon – Waveshare STS3215 Servo | $28.99 | Servo de bus de alta precisión con retroalimentación |
| Bus Servo Adapter | Waveshare Bus Servo Adapter Board | 1 | Amazon – Bus Servo Adapter A | $10.99 | Interfaz de comunicación TTL/RS485 |
Componentes mecánicos
| Artículo | Descripción | Cant. | Enlace del proveedor | Precio | Notas |
| MR106ZZ | Rodamiento de bolas 10×6×3 mm | 2 | Amazon – ACROPIX MR106ZZ Bearings (10pcs) | $5.49 (10pcs) | Blindado, prelubricado |
| LM6UU | Rodamiento lineal 6×12×19 mm | 4 | Amazon – uxcell LM6UU Bearings (4pcs) | $8.99 (4pcs) | Para un movimiento lineal suave |

Varillas de acero y rodamientos lineales
Rods
| Artículo | Descripción | Cant. | Enlace del proveedor | Precio | Notas |
| Steel Rod | Varilla de acero inoxidable 6 mm × 150 mm | 2 | Amazon – uxcell Stainless Steel Rod 6mm×150mm (5pcs) | $8.39 (5pcs) | Alta precisión, resistente a la corrosión |
3D-Printed Parts
| Part Number | Descripción | Cant. | Material | Ajustes de impresión |
| RB9.01.060.010 | Bastidor principal | 1 | PLA/PETG | 0.2mm layer, 20% infill |
| RB9.01.060.020 | Abrazadera | 2 | PLA/PETG | 0.2mm layer, 20% infill |
| RB9.01.060.030 | Cremallera | 2 | PLA/PETG | 0.15mm layer, 30% infill |
| RB9.01.060.040 | Piñón motriz | 1 | PLA/PETG | 0.15mm layer, 30% infill |
Notas de impresión 3D
- Material: PLA recomendado para prototipos, PETG para uso de producción
- Altura de capa: 0,15-0,2 mm para un acabado superficial óptimo
- Relleno: se recomienda un relleno mayor (30 %) para los engranajes a fin de garantizar la resistencia
- Soportes: pueden ser necesarios según la orientación de impresión
- Posprocesado: puede ser necesario un lijado ligero para los ajustes de los rodamientos
Tornillos
| Artículo | Descripción | Cant. | Estándar | Precio | Notas |
| M3×10 | Tornillo de cabeza avellanada | 4 | Amazon – M3×10 Tornillo de cabeza avellanadas | $6.39 (100pcs) | Para fijar la cremallera |
| M3×20 | Tornillo de cabeza avellanada | 4 | Amazon – M3×20 Tornillo de cabeza avellanadas | $6.99 (100pcs) | Para fijar la abrazadera a la varilla |
| M4×8 | Tornillo de cabeza avellanada | 2 | Amazon – M4×8 Tornillo de cabeza avellanadas | $9.99 (100pcs) | Para retener el rodamiento del bastidor principal |
Tuercas
| Artículo | Descripción | Cant. | Estándar | Precio | Notas |
| M3 | Tuerca hexagonal | 4 | Amazon – M3 Tuerca hexagonals | $5.99 (100pcs) | Para el montaje de la abrazadera |
Herrajes del servo
| Artículo | Descripción | Cant. | Fuente | Precio | Notas |
| Tornillos autorroscantes | Tornillos de montaje del servo | 4 | Kit del servo | Incluido | Incluido con el STS3215 |
| Disco del servo | Adaptador del eje de salida | 1 | Kit del servo | Incluido | Incluido con el STS3215 |
| Tornillo de montaje | Tornillo de retención del disco | 1 | Kit del servo | Incluido | Incluido con el STS3215 |
Estimación de costes
| Category | Coste estimado (USD) |
| Componentes electrónicos | $39.98 |
| Componentes mecánicos | $22.87 |
| Materiales de impresión 3D | $5-10 |
| Elementos de fijación | $1.60 (approximate) |
| Total | $69.45-74.45 |
Costes basados en los precios de Amazon a la fecha actual — 6 de junio de 2025. Las cantidades al por mayor suponen un ahorro significativo en los elementos de fijación.
Montaje
Montaje guide:
https://github.com/roboninecom/3D-Printed-Parallel-Gripper-for-Robotics-Arms/blob/main/docs/assembly-guide.md
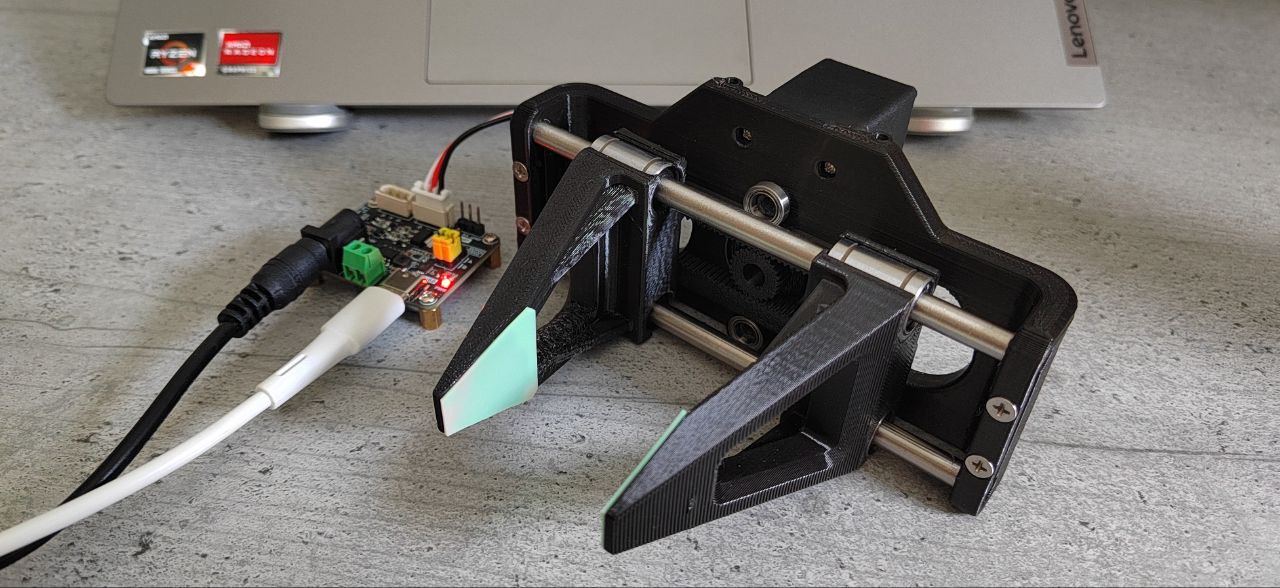
Durante el montaje de la primera versión hubo un problema al imprimir una de las mordazas de la pinza, por lo que la primera prueba se realizó con una sola mordaza.
Unos días después llegó la segunda mordaza y pudimos realizar pruebas completas.
El ingeniero añadió almohadillas de silicona para un mejor agarre de los objetos. Esta misma primera versión se ha publicado como código abierto en nuestro GitHub:
https://github.com/roboninecom/3D-Printed-Parallel-Gripper-for-Robotics-Arms
Comentarios de la comunidad
Hadassah Freedman:
«Me preguntaba si habéis considerado cómo se comporta el diseño con cargas más pesadas, especialmente en la base de la cremallera y en los pivotes de las mordazas. Quizá añadir radios de acuerdo en esas zonas para reducir las concentraciones de tensión y evitar la separación de capas en las impresiones FDM ayudaría a que el diseño soporte cargas más pesadas durante más tiempo y con mayor frecuencia. Veo que la base de la cremallera tiene un grosor decente pero no presenta radios claros en la transición hacia los dientes verticales, lo que puede ser un concentrador de tensiones; los pivotes de las mordazas tampoco tienen radios visibles que suavicen las trayectorias de carga desde los pasadores hacia las paredes laterales. Me encantaría saber más sobre sus capacidades.»
Joy Kariya:
«Revisé el repositorio y tengo una sugerencia: ¿por qué no integráis finales de carrera a ambos lados de la pinza para que, en lugar de un retardo temporal, se detenga cuando el objeto quede agarrado? Así también podría agarrar objetos pequeños.»
Pinza con finales de carrera integrados
que servo le poneis a la garra? con uno solo mueve los dos dedos no?
Correcto, un único servo acciona ambos dedos a través del paralelogramo, lo que simplifica el control y el cableado. Usamos un servo de bus serie de par medio que sobra para la mayoría de objetos domésticos.
buenisimo que sea open source, ya lo estoy imprimiendo este finde
como resolvisteis el tema de la fuerza de agarre? llevais sensor o vais a ciegas con el par del servo
En esta versión estimamos la fuerza a partir del par del servo, leyendo la corriente del bus serie. Funciona razonablemente para objetos rígidos; para objetos deformables planeamos integrar galgas en los dedos en una iteración futura.
Gracias por la respuesta detallada.
se puede escalar el diseño para agarrar cosas mas grandes o se rompe la cinematica?
La cinemática del paralelogramo escala bien hasta cierto punto; al aumentar la apertura conviene engrosar las bielas y revisar el par del servo. Para aperturas muy grandes suele compensar rediseñar a un mecanismo de cremallera.
Entendido, gracias por responder.
¿los planos están en formato STEP o solo los STL? para modificarlos necesito el sólido paramétrico
Publicamos tanto los STL listos para imprimir como los ficheros STEP y el original paramétrico, precisamente para que podáis adaptar la geometría a vuestros servos o tamaños de objeto. Están en el repositorio del proyecto.
Gracias por la respuesta detallada.
el diseño esta muy bien pero yo le veo un problema, el centro de gravedad queda muy adelantado y si lo montas en la punta de un brazo largo te penaliza mucho el par de la muñeca. quitando eso me parece un trabajo excelente y muy bien documentado
lo de accionar los dos dedos con un solo motor me parece la mejor decision del diseño, simplifica todo
monté algo parecido el año pasado y el punto debil siempre fue el eje, los pasadores impresos se desgastan rapido. al final puse varilla de acero de 3mm y un par de rodamientos pequeños y la cosa cambio totalmente, ya no hay holgura. lo mismo os sirve la idea
una duda tonta, el TPU en las puntas mejora mucho el agarre o es marketing?
No es marketing: unas almohadillas de TPU en las puntas aumentan notablemente la fricción y el agarre sobre superficies lisas, además de amortiguar el contacto. Es una mejora barata y muy recomendable.
Trabajo dando clases de robótica en un instituto y este diseño me parece perfecto para que los alumnos lo impriman y monten en una tarde. La documentación es clara y las piezas no requieren soportes complicados, que siempre es un dolor de cabeza con impresoras escolares de gama baja. Gracias por liberarlo.
imprimo uno este finde y os cuento
GENIAL el mecanismo paralelo, justo lo que buscaba
garra bonita. cierre lento. el muelle flojea
Llevo meses buscando una garra de código abierto que sea a la vez sencilla de imprimir, fácil de controlar con un solo actuador y lo bastante robusta para algo más que demos de feria, y creo que por fin la he encontrado. Lo que más valoro de vuestro enfoque es que habéis priorizado la fabricabilidad sobre la elegancia teórica: cualquiera con una impresora doméstica y un servo de bus serie puede tener esto funcionando en una tarde, y eso es justo lo que hace que un diseño abierto tenga impacto real en la comunidad. Mi única sugerencia sería documentar también el rango de fuerza de agarre medido para distintos objetos, porque ayudaría mucho a decidir si encaja en cada proyecto. Trabajo excelente.
los dedos impresos se van a romper en cuanto agarre algo pesado seguro
buen aporte, lo combinare con un sensor de fuerza casero a ver que tal sale
me gusta mucho que hayais pensado en la facilidad de impresion, sin soportes y con tolerancias generosas. muchos diseños bonitos luego son imposibles de imprimir bien en una maquina normal. este se nota que esta pensado para gente real con impresoras normales
¿con PLA aguanta o mejor PETG para uso continuo?
El PLA va bien para pruebas y uso ligero, pero para uso continuo o ambientes cálidos recomendamos PETG, que soporta mejor la fatiga y no se deforma con el calor del propio servo. Las puntas en TPU son un buen complemento en ambos casos.
Ahora está claro, gracias.
¿qué relleno usasteis para los dedos? a mí con el 20% me flexan demasiado
Imprimimos los dedos al 40% de relleno con perímetros gruesos en la zona de la articulación. Para cargas mayores recomendamos subir a relleno sólido en las primeras capas o pasar a PETG, que tolera mejor la flexión repetida que el PLA.
Entendido, gracias por responder.
Como ingeniero mecánico me ha gustado especialmente cómo habéis resuelto la transmisión manteniendo los dedos paralelos durante todo el recorrido, que es el típico detalle que se descuida en las garras impresas y acaba dando agarres inestables. El paralelogramo está bien dimensionado y la elección de accionar ambos dedos con un único servo simplifica enormemente el control. Si tuviera que poner una pega, diría que la unión servo-biela podría beneficiarse de un acoplamiento metálico en lugar de la pieza impresa, porque ese es el punto que más par soporta y donde antes aparecerá holgura con el uso. Por lo demás, un diseño muy maduro y bien pensado.
buen trabajo de diseño, muy elegante la solucion del paralelogramo
Qué diseño tan limpio. Me lo guardo.
precioso. me lo imprimo seguro
Lo monté ayer y funciona a la primera, solo tuve que limar un poco una de las guías porque mi impresora deja las paredes algo gruesas. El agarre es mejor de lo que esperaba para una garra tan sencilla. Mil gracias por compartirlo.
vais a sacar una version de tres dedos? para objetos redondos la de dos dedos resbala un poco y un tercer dedo daria mucha mas estabilidad en el agarre la verdad