Augmenter la rigidité structurelle du manipulateur 6 DDL
 1897
1897
Résumé
Cet article présente un ensemble de travaux de conception et d’ingénierie visant à garantir une flèche du manipulateur ne dépassant pas 0,3 mm. L’objet de l’étude est un manipulateur robotique. L’objectif des travaux de R&D est d’optimiser la conception des composants suivants du manipulateur :
- Support en aluminium
- Support en acier en forme de U
- Support en acier « aileron »
Résultats des travaux réalisés :
À partir des résultats de l’optimisation des supports, un modèle électronique affiné du manipulateur a été développé, et le manipulateur a été calculé en résistance statique sous la surcharge maximale issue des moteurs. Une liste de propositions de modifications de conception a été établie. Un modèle électronique de la conception optimisée a été développé, y compris les calculs de vérification de la structure.
Les résultats de rigidité requis n’ont pas pu être pleinement atteints. La rigidité de la structure a toutefois été nettement augmentée :
- Le déplacement dû à la charge verticale a diminué de 57%
- Le déplacement dû à la charge horizontale selon l’axe X a diminué de 65%
- Le déplacement dû à la charge horizontale selon l’axe Z a diminué de 66%
- Le déplacement dû au moment autour de l’axe X a diminué de 66%
- Le déplacement dû au moment autour de l’axe Y a diminué de 76%
- Le déplacement dû au moment autour de l’axe Z a diminué de 67%
Abréviations et désignations
| Abréviation | Définition |
|---|---|
| TOR | Exigences techniques |
| EM | Modèle électronique |
| FE | Élément fini |
| FEM | Modèle aux éléments finis |
| SSS | État de contrainte-déformation |
| CG | Centre de gravité |
| CS | Système de coordonnées |
Introduction
Comme données initiales pour l’analyse de la conception du manipulateur, le Client a fourni un contour réalisé en surfaces, ainsi qu’un ME du manipulateur en configuration repliée. Dans le cadre des travaux, une analyse du manipulateur a été menée et les propriétés de rigidité de la structure ont été augmentées, celle-ci étant capable de supporter les charges statiques et les surcharges des moteurs qui s’exercent sur elle, tout en présentant la masse minimale possible.
Comme données initiales pour l’optimisation de la conception du manipulateur, le Client a fourni un ME du manipulateur. Dans le cadre des travaux, la conception a été affinée et calculée en résistance statique en conditions de surcharge, et des recommandations d’amélioration ont été élaborées.
Élaboration du concept du manipulateur
Dans le cadre des travaux, il était nécessaire d’optimiser la conception du manipulateur. Selon les exigences techniques, les principales exigences relatives à la conception du manipulateur sont les suivantes :
- La structure doit supporter une charge statique provenant d’une masse de 1,1 kg
- La flèche de l’extrémité du manipulateur ne doit pas dépasser 0,3 mm
- Augmentation de masse admissible : pas plus de 15%
- Il est nécessaire de conserver les angles de flexion actuels égaux à 270° par articulation
- Ne pas augmenter le nombre de pièces uniques (fabriquées sur mesure)
Description des principaux éléments du manipulateur
L’exigence de rigidité devrait être satisfaite en modifiant la forme des supports dans la partie principale du manipulateur.
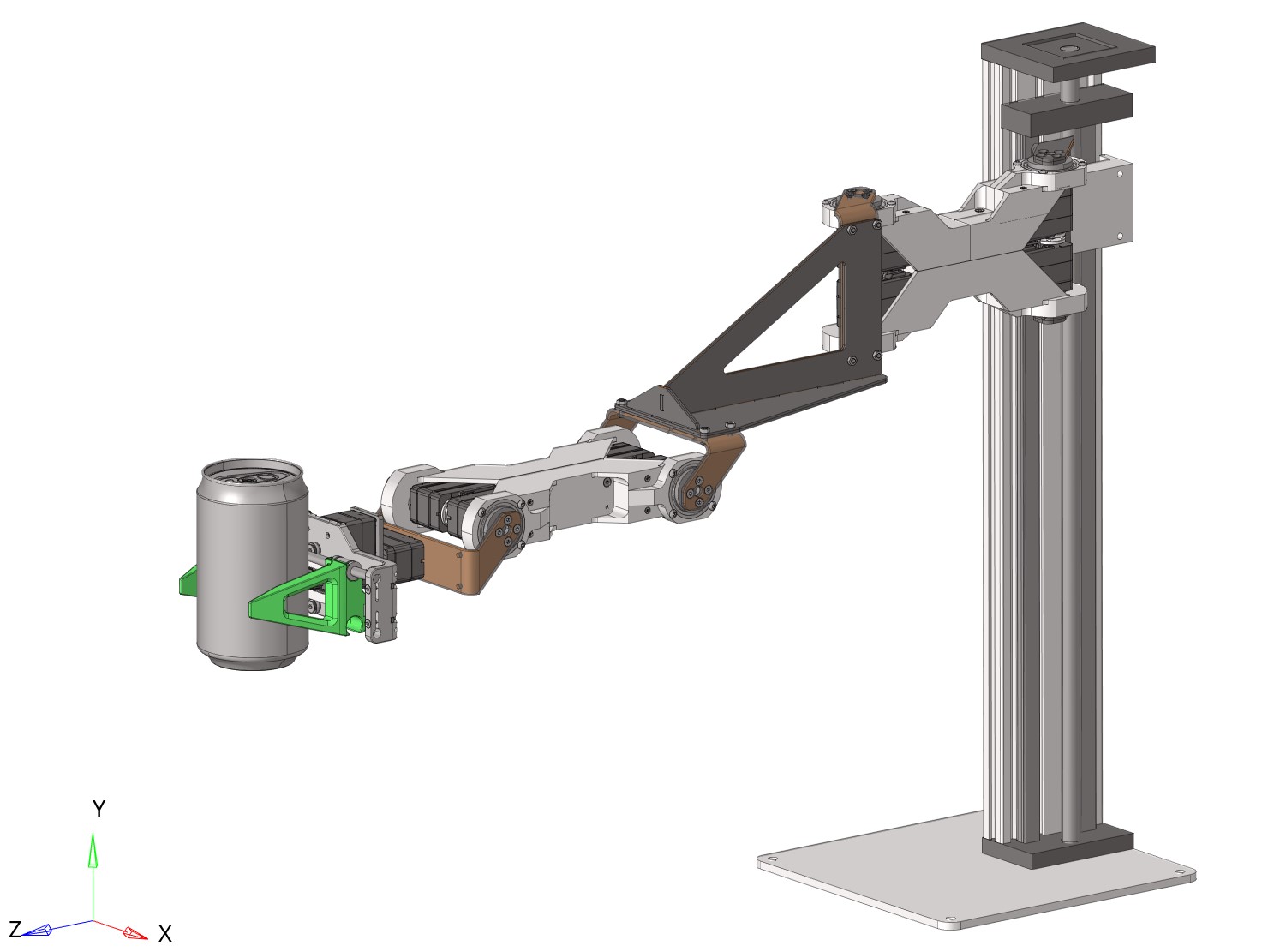
Vue générale du manipulateur 1 |
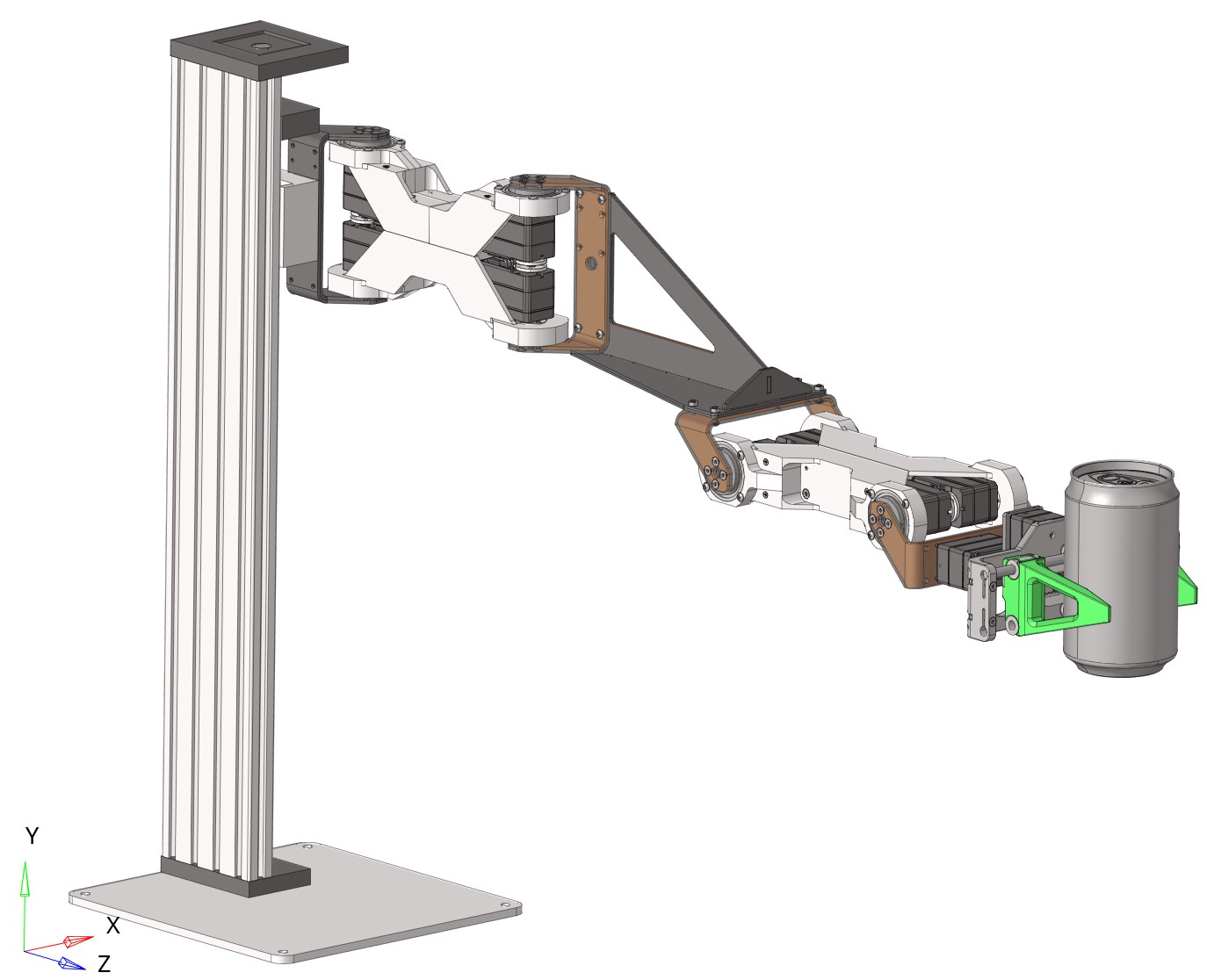
Vue générale du manipulateur 2 |
Comme le montre la figure 1, la conception du manipulateur se compose d’un montant (figure 2), de 4 supports en acier en forme de U (figure 3), de 4 supports en aluminium (figure 4), de 1 support en acier « aileron » (figure 5) et de 10 servomoteurs.
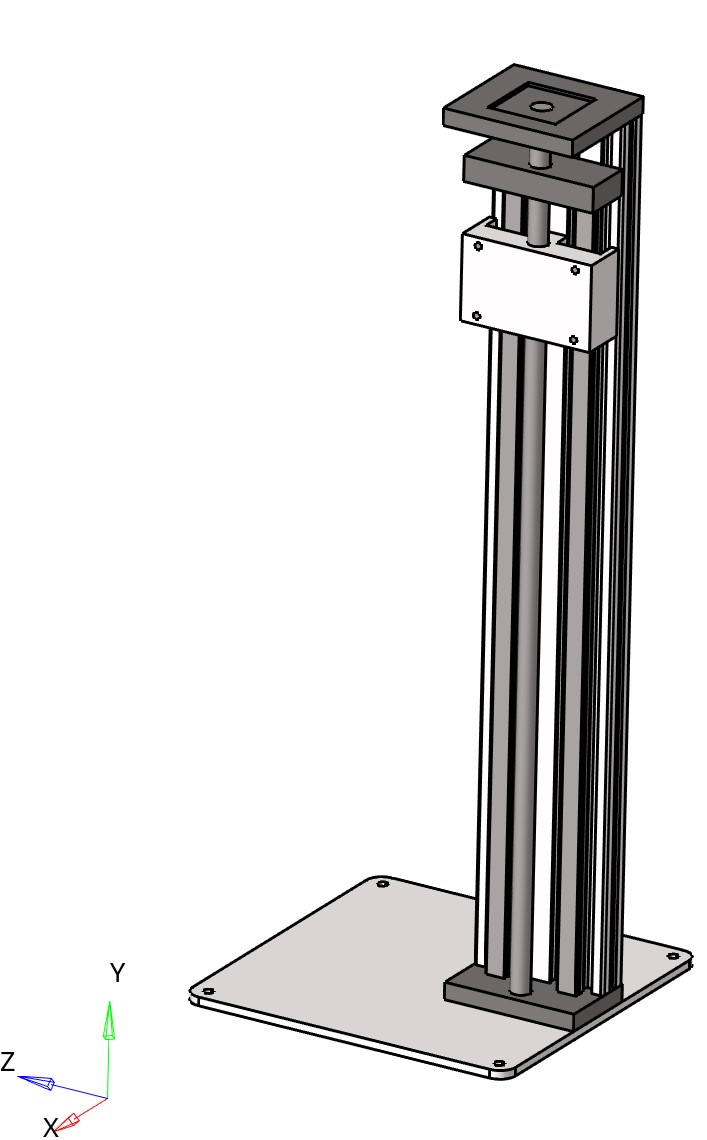
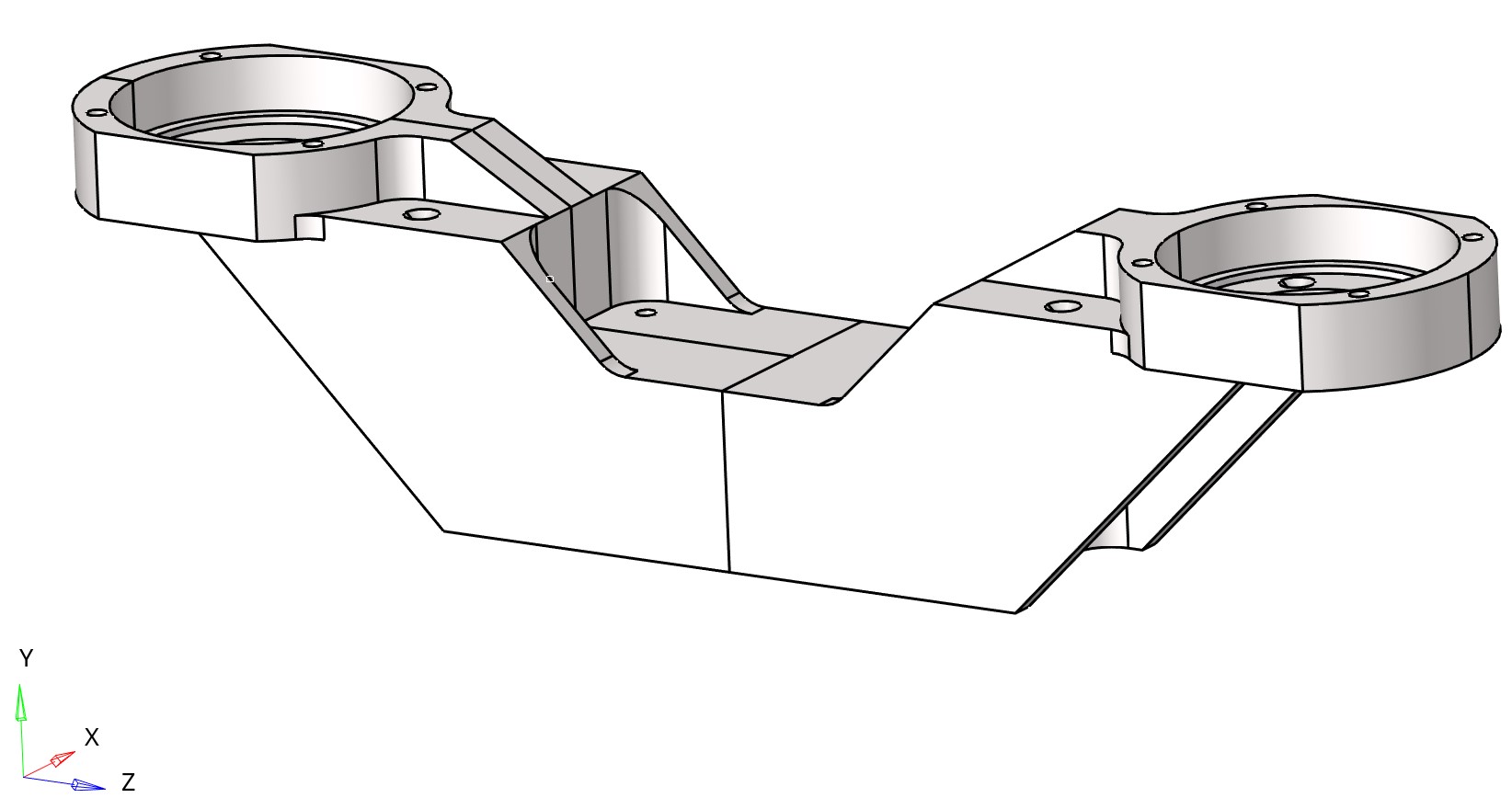
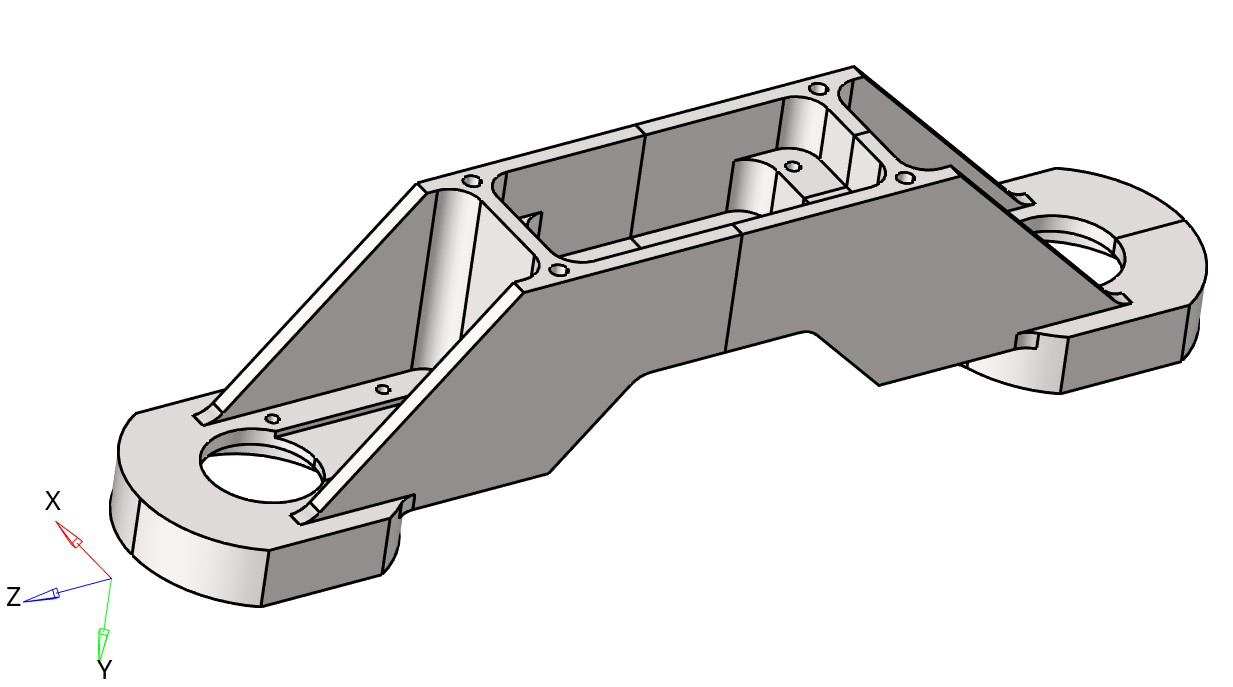
Vue générale du montant
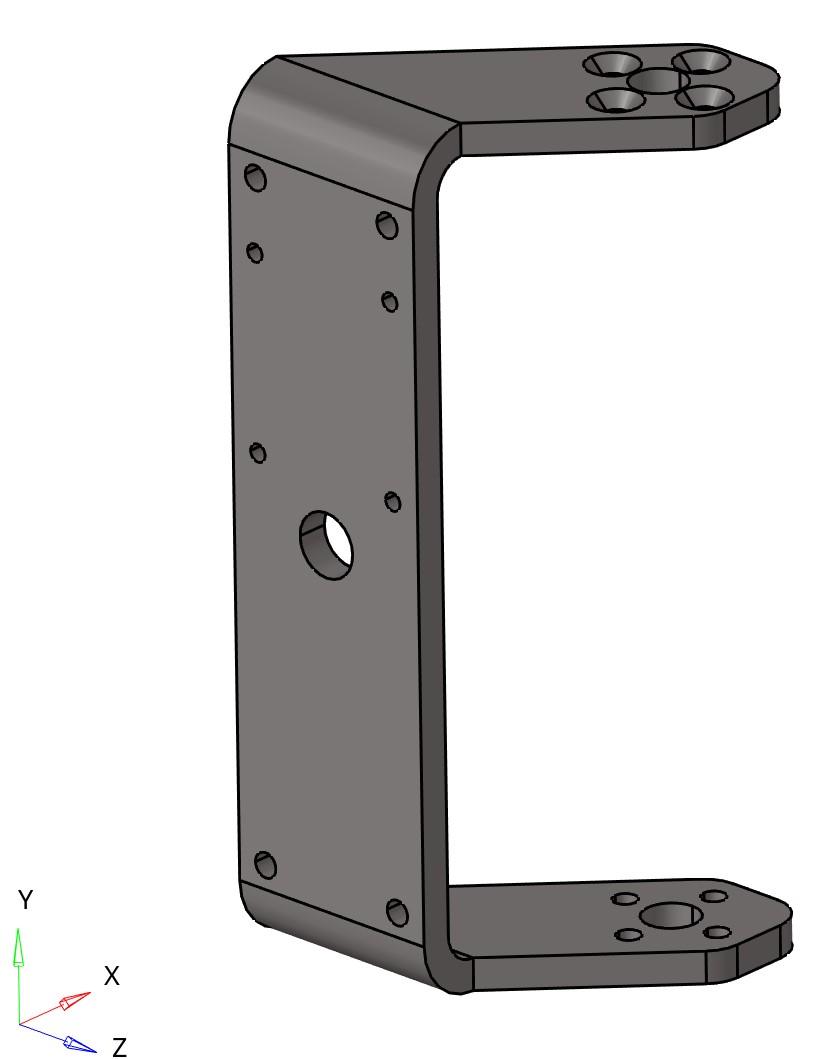
Support en acier en forme de U 1 |
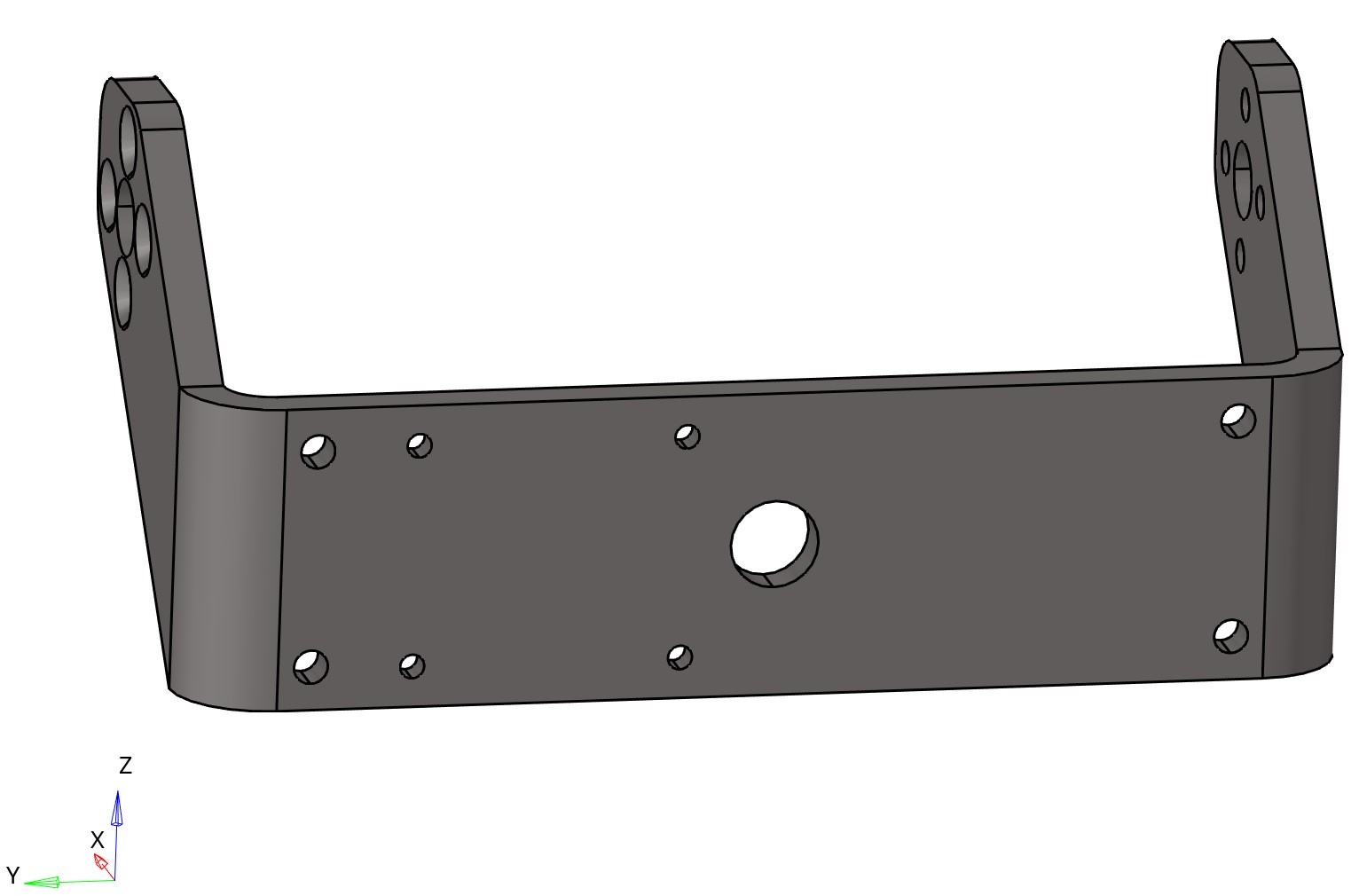
Support en acier en forme de U 2 |
Support en aluminium 1 |
Support en aluminium 2 |
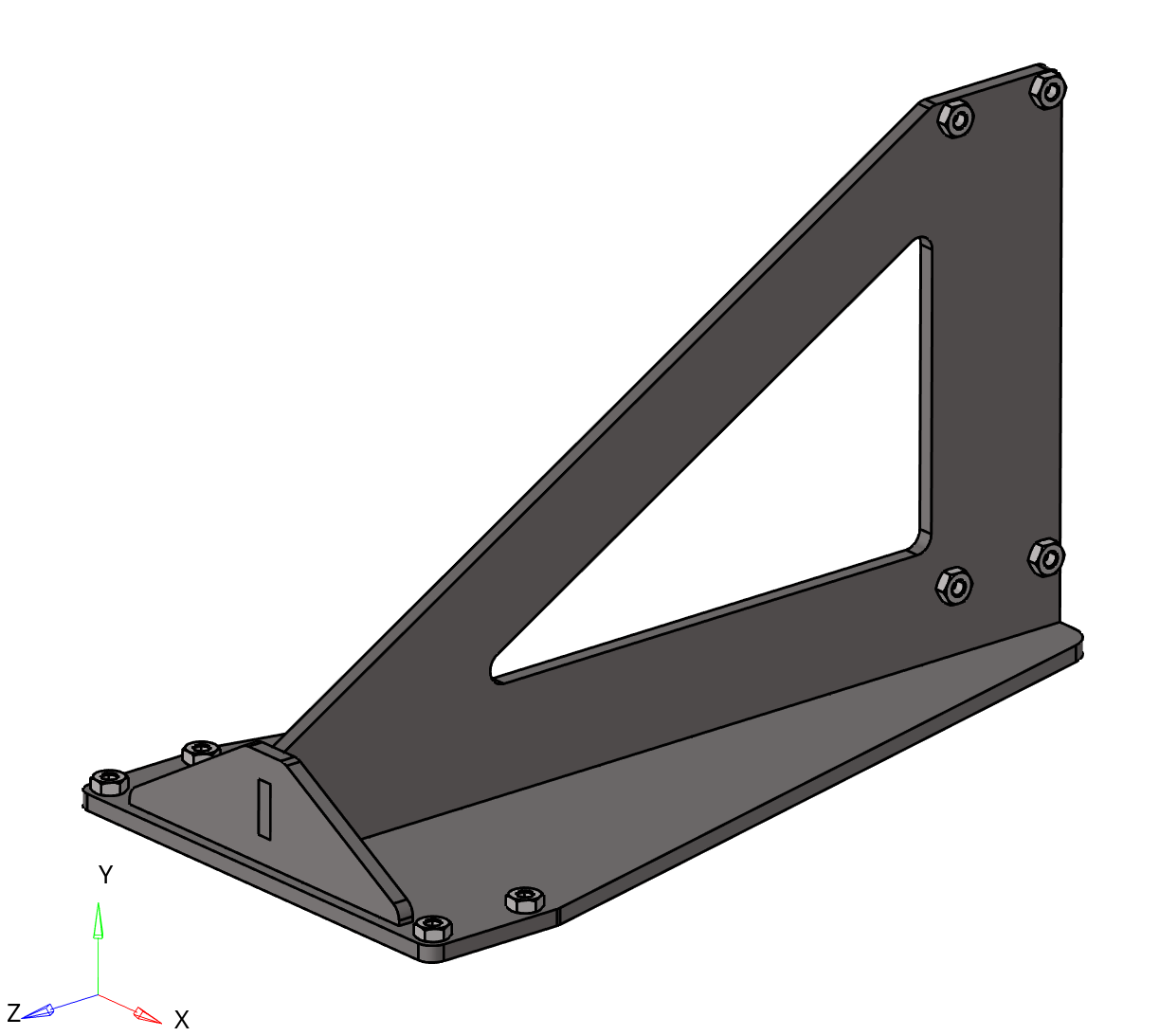
Support en acier « aileron »
Carte de répartition des matériaux dans le modèle :
Éléments en acier |
Éléments en aluminium |
Construction du modèle aux éléments finis
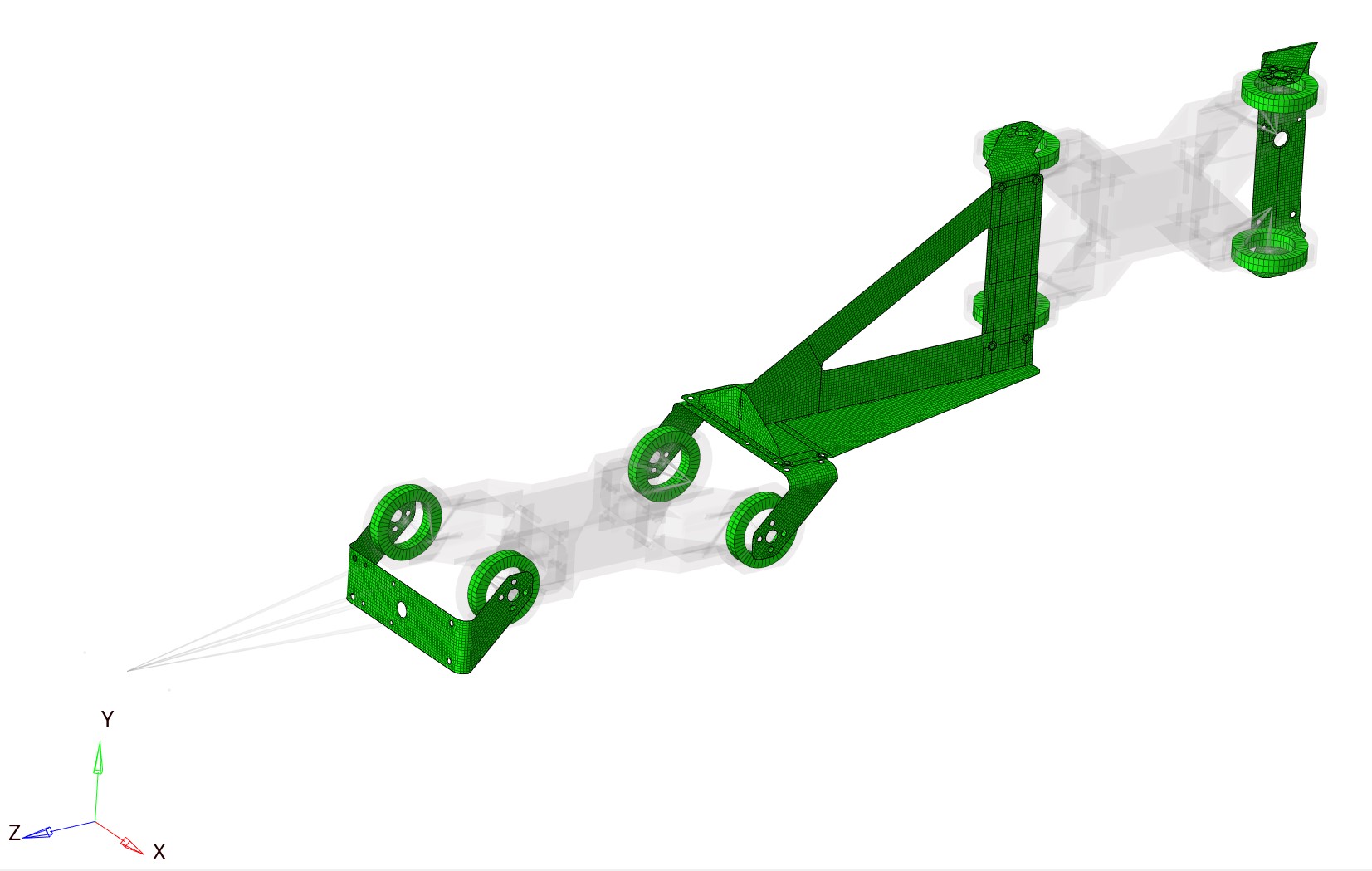
Pour créer le MEF, il est nécessaire de simplifier le modèle afin d’accélérer le calcul. Il a été décidé de considérer le montant comme absolument rigide et de remplacer la fixation des nœuds du manipulateur au montant par des conditions aux limites (en bloquant les points de fixation du manipulateur au montant). Il a également été décidé de remplacer la modélisation du dernier maillon du manipulateur (ensemble de préhension) par un maillon absolument rigide.

Figure 8 – vue générale du modèle MEF

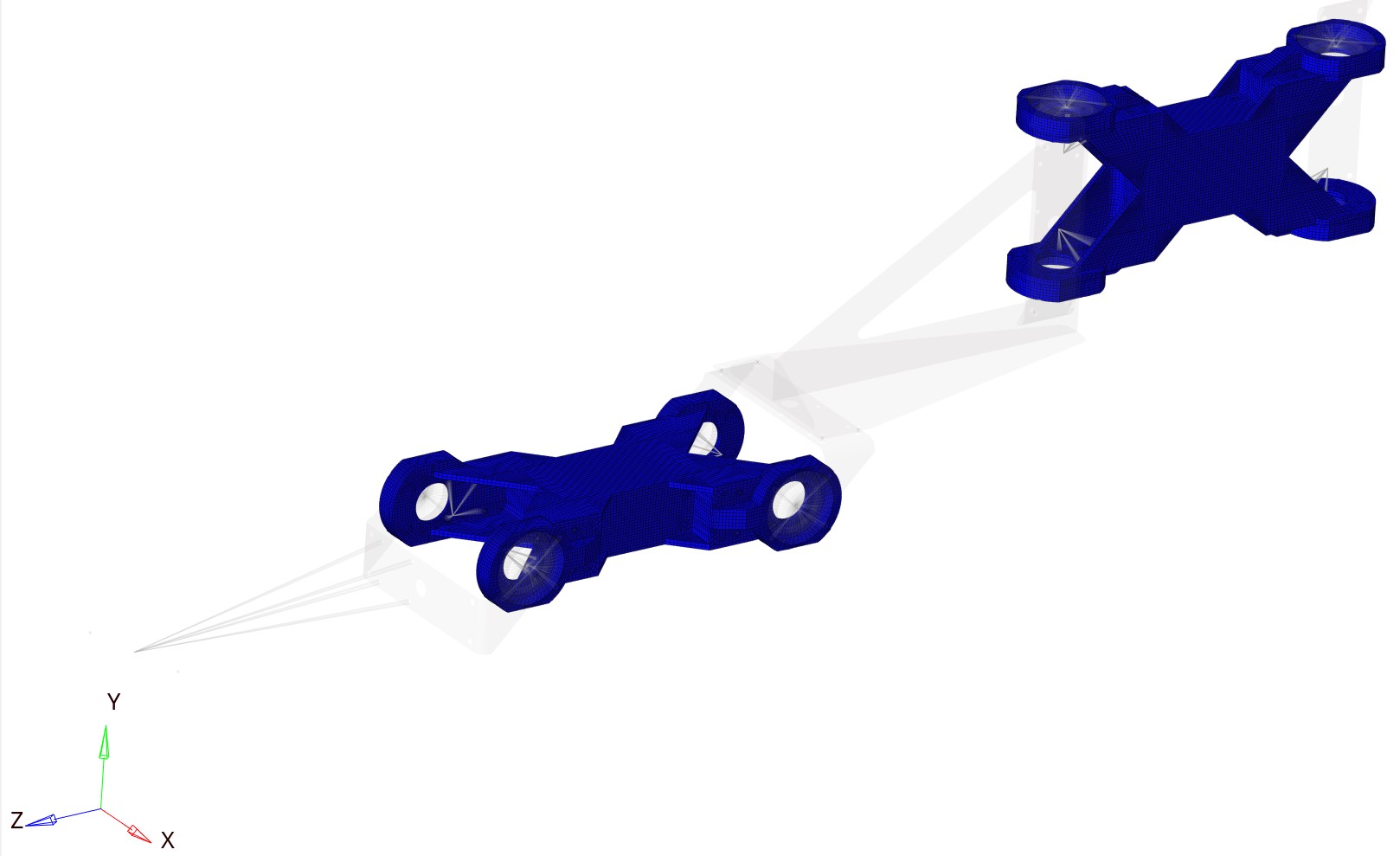
Figure 9 – types d’éléments utilisés dans le modèle
Il a été décidé de modéliser le support en forme de U et le support « aileron » avec des éléments plats de type QUAD4, car l’une des dimensions de la pièce (l’épaisseur) est << que les 2 autres dimensions de la pièce. QUAD4 est un élément plat à 4 nœuds avec 6 degrés de liberté par nœud.

Figure 10 – MEF du support en acier en forme de U |

Figure 10 – MEF du support en acier en forme de U |

Figure 11 – MEF du support en acier « aileron »
Il a été décidé de modéliser le support en aluminium et le roulement avec des éléments solides de type HEX8, car ils sont plus précis que les tetra4. HEX8 est un élément solide à 8 nœuds avec 3 degrés de liberté par nœud.

Figure 12 – MEF du support en aluminium |

Figure 12 – MEF du support en aluminium |
Modélisation de la transmission des efforts et des assemblages boulonnés
Pour modéliser la transmission des efforts des moteurs vers le support et le roulement, il a été décidé d’utiliser un élément de type RBE2. Il a également été décidé de remplacer les boulons reliant les éléments par des RBE2. RBE2 est un élément fini absolument rigide (le déplacement du nœud maître est égal au déplacement des nœuds esclaves). La modélisation du servomoteur est remplacée par 1 élément RBE2 où les nœuds esclaves sont les nœuds de fixation du moteur et le nœud maître est l’élément RBE2 du roulement avec le support en acier.
Il existe 4 façons de modéliser les boulons :
- Première façon : modéliser les boulons à l’aide d’un élément fini de poutre à deux nœuds avec 6 degrés de liberté à chaque nœud et relier ses nœuds à la surface à l’aide d’éléments RBE2 ou RBE3.
- Deuxième façon : conditions aux limites dans la zone de fixation du boulon.
- Troisième façon : modéliser les boulons à l’aide d’un élément RBE2.
- Quatrième façon : modéliser le boulon à l’aide d’un élément fini solide à huit nœuds en forme d’hexaèdre avec 3 degrés de liberté à chaque nœud. Pour cette méthode, il est nécessaire de définir des contacts entre le boulon et la pièce. Cela permet de modéliser plus précisément le comportement de l’assemblage boulonné mais complique le MEF.
Nous utiliserons la troisième méthode de modélisation pour accélérer le calcul et l’optimisation.

Figure 14 – MEF de la modélisation du servomoteur

Figure 15 – éléments RBE2 remplaçant les boulons
Configuration de l’interaction de contact
Entre le roulement et le support en aluminium, il a été décidé de créer une interaction de contact de type Slide. Pour cela, il faut créer des surfaces de contact et préciser les surfaces qui seront en contact. Ensuite, il faut configurer CONTACT : sélectionner la surface maître (MASTER) et la surface esclave (SLAVE). Elles diffèrent en ce que, lors du contact, OPTISTRUCT vérifie si la surface esclave intersecte le plan de la surface maître par des points ; si oui, OPTISTRUCT calculera la zone de contact à partir de ces points d’intersection.
La surface maître doit être choisie comme étant la surface ayant la plus grande taille d’élément. Il est également important de spécifier SRCHDIST et CLEARANCE (jeu). Le premier paramètre indique à quelle distance considérer les surfaces comme étant en contact, tandis que le second indique le jeu.
Dans ces calculs, le contact de type SLIDE est un type de contact sans frottement entre les surfaces. Il existe un réglage de contact supplémentaire N2S ou S2S. Le premier type de contact est le plus rapide en termes de puissance de calcul mais fournit une image moins précise de la pression de contact. Le second est précis mais ralentit considérablement le calcul.

Figure 16 – interaction de contact des roulements et du support
Élaboration des cas de chargement
Pour calculer le manipulateur en résistance statique, il est nécessaire de déterminer les modes de chargement.
Définissons le coefficient de sécurité K égal à 1,5.
La force verticale se calcule comme la masse de la charge m multipliée par l’accélération de la pesanteur g et par le coefficient de sécurité K :
$F_y = m cdot g cdot K = 16.18,text{N}$
$F_x = varepsilon cdot R cdot m cdot K = 6.73 text{N}$
$F_z = omega^2 cdot R cdot m cdot K = 72.49 text{N}$
$M_x = left(J_{x,mathrm{cg}} + m cdot d_1^2right) cdot K cdot varepsilon + F_y cdot l_1
= 651 text{N}cdottext{mm}$
$M_y = left(J_{y,mathrm{cg}} + m cdot d_2^2right) cdot K cdot varepsilon + F_x cdot l_2
= 635 text{N}cdottext{mm}$
$M_z = left(J_{z,mathrm{cg}} + m cdot d_3^2right) cdot K cdot varepsilon
= 133 text{N}cdottext{mm}$
Tableau des symboles
| Symbole | Description | Unité de mesure |
|---|---|---|
| Fy | Force verticale (poids) | N |
| Fx | Force horizontale (force d’inertie tangentielle) | N |
| Fz | Force longitudinale (force centrifuge) | N |
| Mx | Moment total autour de l’axe X | N·mm |
| My | Moment total autour de l’axe Y | N·mm |
| Mz | Moment de torsion autour de l’axe Z | N·mm |
| m | Masse de la charge | t |
| g | Accélération de la pesanteur | mm/s² |
| K | Coefficient de sécurité | Sans dimension |
| ε | Accélération angulaire | rad/s² |
| ω | Vitesse angulaire | rad/s |
| R | Distance de l’axe de rotation au CG de la charge | mm |
| J_cg | Moment d’inertie de la charge autour de son CG (avec indice x, y, z) | t·mm² |
| d | Distance du CG de la charge à l’axe de rotation (avec indice 1, 2, 3) | mm |
| l | Distance du point d’application de la force à l’axe de rotation (avec indice 1, 2) | mm |
5 Analyse des résultats
Les résultats du calcul ont été les suivants :
| Cas de chargement | Fx | Fy | Fz | Mx | My | Mz |
|---|---|---|---|---|---|---|
| Déplacement maximal (mm) | 1.03 | 1.05 | 0.62 | 0.12 | 0.17 | 0.03 |
| Contrainte maximale (MPa) | 93 | 92 | 65 | 10 | 14 | 4 |
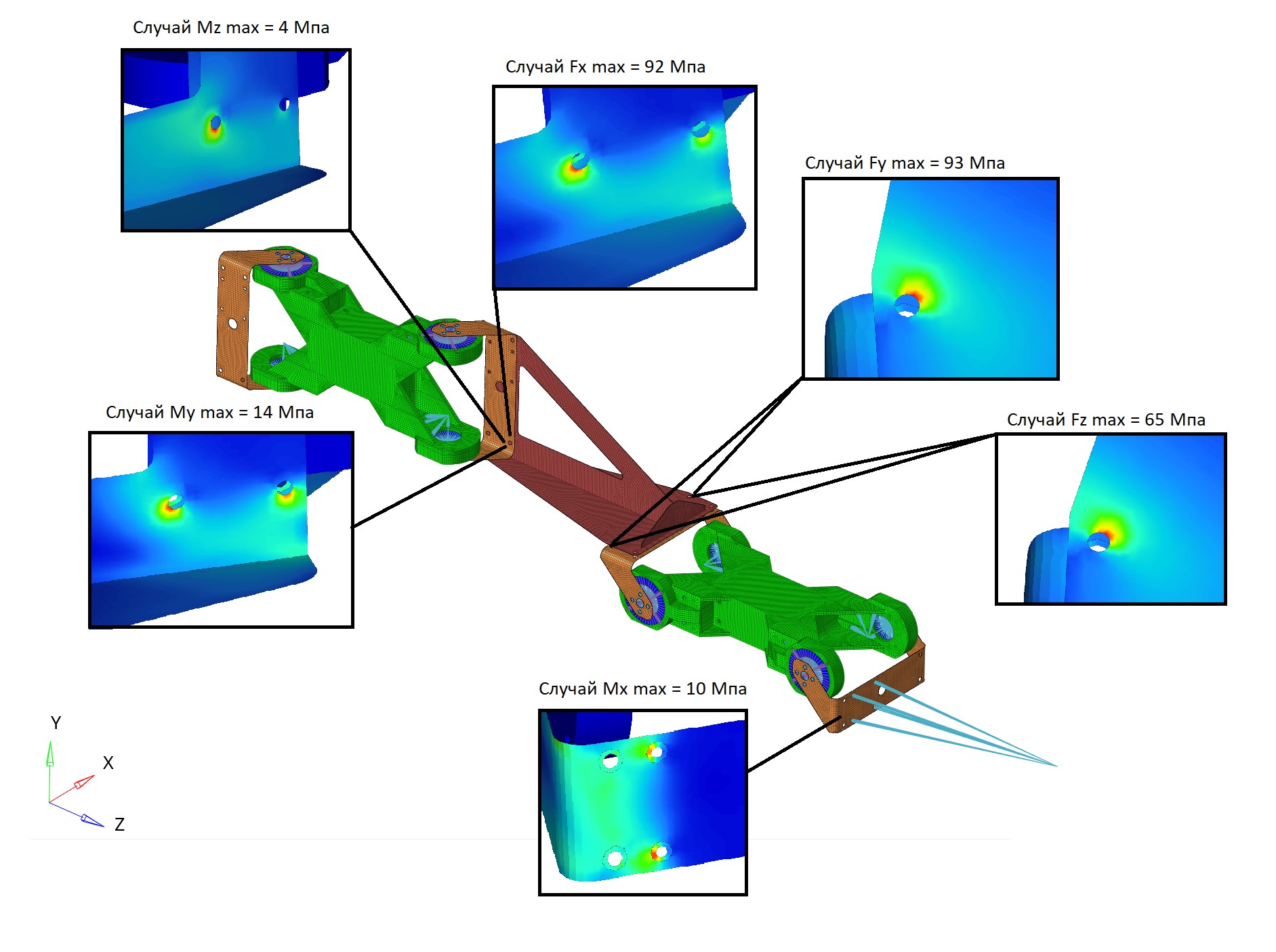
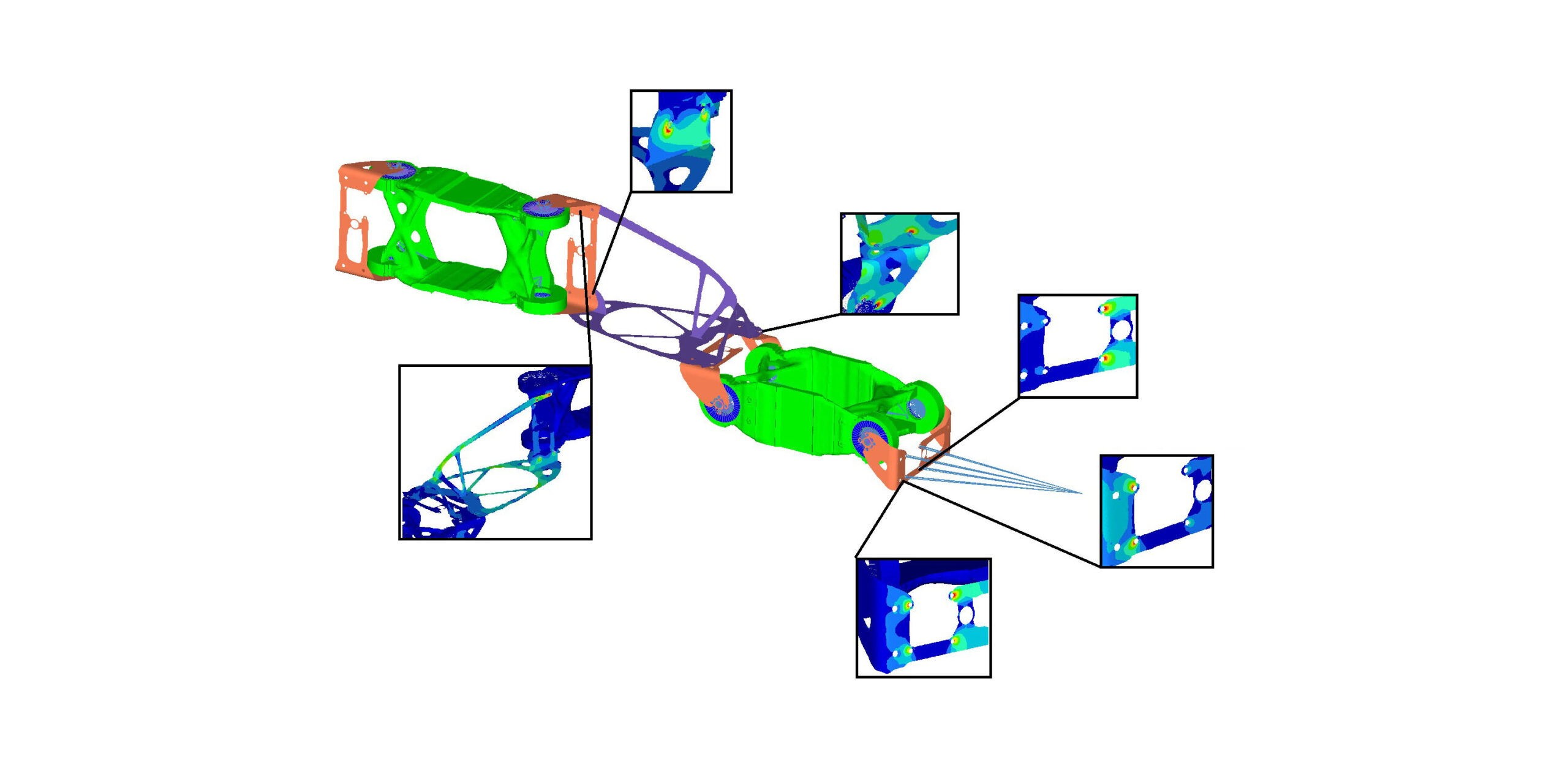
Figure 17 – emplacement des zones les plus sollicitées, cas de chargement et contraintes apparaissant dans ces zones
Les contraintes maximales apparaissent aux nœuds de fixation des boulons aux pièces. L’aileron est soumis à la contrainte la plus élevée.
Principes de la méthode d’optimisation topologique (selon l’algorithme SIMP)
Les méthodes d’optimisation se divisent en deux catégories – la conception conceptuelle et les améliorations.
L’optimisation au niveau conceptuel consiste à réaliser une optimisation (topologique ou topographique) à l’étape initiale du processus de conception afin de créer la meilleure forme à partir de laquelle poursuivre.
Le programme d’optimisation automatise essentiellement le processus « conception – analyse – retour du modèle – reconception ». Cela permet d’apporter des modifications à la structure selon des critères de conception sans changer la topologie globale. L’optimisation de la conception peut reposer sur l’optimisation de dimensions précises, de la forme ou d’une forme choisie arbitrairement.
L’optimisation topologique est liée à la répartition de la matière et à la manière dont les éléments sont connectés au sein de la structure. Elle considère la « densité équivalente », ou pseudo-densité de chaque élément, comme une variable de conception.
La méthode SIMP
La méthode d’optimisation topologique permet de déterminer la répartition optimale de la matière dans une zone de conception donnée, correspondant à des conditions aux limites et des modes de chargement donnés, tout en respectant les contraintes supplémentaires imposées. L’idée de la méthode est de déterminer la répartition optimale de la matière dans chaque partie de la zone de conception. Pour cela, la zone de conception est divisée en N éléments. Chaque élément est soit rempli de matière, soit vide. En conséquence, le nombre de combinaisons différentes sera de 2^N, où N est le nombre d’éléments.
Pour résoudre le problème d’optimisation par la méthode SIMP, la densité de matière de chaque élément varie continûment dans la plage de 0 à 1 ou de $rho_{min} $ – pseudo-densité minimale à 1 :
$0 le rho_{min} le rho le 1$
En tenant compte de cette condition, lors de la recherche du minimum de la fonction objectif, la densité de matière est variée. Pour résoudre le problème, il est préférable d’utiliser la « méthode de pénalisation » avec une représentation en puissance des propriétés élastiques du matériau, qui peut s’exprimer ainsi :
$E(rho_e) = rho_e^{p},E$
où E est le module d’élasticité et p le « coefficient de pénalisation » qui est toujours supérieur à 1, ou pour la matrice de rigidité de l’élément comme :
$K(rho_e) = rho_e^{p},K$
où K est la matrice de rigidité de l’élément et p le « coefficient de pénalisation » qui est toujours supérieur à 1.
Souplesse et rigidité
La rigidité globale de la structure peut également servir de fonction objectif. Cela peut aussi être vu comme la minimisation de la souplesse à une réduction de masse donnée. La souplesse est une mesure de la mobilité globale ou de la « mollesse » de la structure – c’est l’inverse de la rigidité. La souplesse totale est égale à la somme des énergies de déformation, ou énergie élastique, dans les éléments. Minimiser la souplesse totale équivaut à maximiser la rigidité totale.
L’algorithme d’optimisation, par un processus itératif, cherche à déterminer les densités des éléments qui minimisent la souplesse globale de la structure :
$C(rho) = sum_{i=1}^{N} rho_i^{p}, mathbf{u}_i^{mathsf{T}}, mathbf{k}_i, mathbf{u}_i$
où u est le vecteur déplacement du i-ème élément, k la matrice de rigidité du i-ème élément, ρ la pseudo-densité de l’élément correspondant. L’équation a la forme :
$K,U = F$
où K est la matrice de rigidité, U la matrice des déplacements, F le vecteur des forces.
Considérations de fabricabilité
Une structure dont la forme est déterminée à partir d’une optimisation tridimensionnelle ne peut, dans bien des cas, pas être fabriquée avec des technologies standard. C’est pourquoi, dans de tels cas, une évaluation de la fabricabilité de la géométrie des structures optimisées est nécessaire. Par ailleurs, pour résoudre ce problème, certaines contraintes peuvent être définies lors de l’optimisation, contribuant à obtenir une géométrie prête à être fabriquée par diverses technologies de production traditionnelles.
Par conséquent, pour l’optimisation selon l’algorithme ci-dessus, il est nécessaire de créer pour chaque pièce optimisée un Des space – une géométrie étendue dans laquelle sera menée la recherche de la conception optimale.

Figure 18 – Des space du support en acier en forme de U |

Figure 19 – Des space du support en aluminium |

Figure 20 – Des space du support en acier « aileron »
Paramètres et contraintes d’optimisation
Pour réaliser l’optimisation, il est nécessaire de créer des variables ou paramètres (réponses) du modèle selon lesquels la pièce sera optimisée. Nous créons 2 réponses système, ou paramètres :
Premier paramètre – wcompliance (souplesse pondérée). Le rapport a la forme :
$C_w = sum_{i} W_i , C_i = frac{1}{2}sum_{i} W_i , mathbf{u}_i^{mathsf{T}} , mathbf{f}_i$
Deuxième paramètre – la masse dans l’espace de conception donné. Ce paramètre nous donne la masse de la zone de conception. Il peut être défini pour l’ensemble de la structure, ainsi que pour des propriétés (composants) et matériaux individuels ou pour des groupes de propriétés (composants) et de matériaux.
Outre la fonction objectif (à savoir la réduction de la souplesse), il est nécessaire de définir des contraintes. dconstrain est une contrainte que le solveur ne doit pas violer. Dans les calculs, la masse ne doit pas différer de la masse de la pièce précédente de plus de 15%. Cela signifie que la contrainte de masse sera différente pour chaque zone de conception. Dans ce programme, on peut aussi définir une contrainte sur le volume, le volume relatif ou la masse relative. La différence entre la masse relative et le volume relatif est que la masse relative prend en compte la masse de l’ensemble du modèle dans le calcul, tandis que la fraction volumique ne considère que la zone de conception.
Pour trouver la forme la plus optimale, il est nécessaire de créer une fonction objectif. Cette fonction est l’extremum que nous devons trouver. Diverses réponses système y sont spécifiées (déplacement, angle de torsion, contraintes, etc.). Dans ce cas, nous spécifions wcompliance comme la fonction dont le programme cherchera le minimum.
Ensuite, nous définissons des contraintes d’optimisation supplémentaires. Outre la masse, une contrainte supplémentaire sera également la contrainte maximale admissible de 150 MPa. Ce paramètre doit être inférieur à la limite d’élasticité du matériau car, lorsque la limite d’élasticité est atteinte, la pièce se déforme plastiquement, ce qui peut entraîner de très graves conséquences. Il faut comprendre que la valeur de la contrainte limite sera comparée à la contrainte dans l’élément selon la théorie de von Mises.
Contraintes de fabrication dans OptiStruct
Le problème de l’optimisation topologique est que les concepts de conception élaborés ne sont très souvent pas fabricables. Un autre problème est que la solution du problème d’optimisation topologique peut dépendre du maillage si les mesures appropriées ne sont pas prises.
OptiStruct propose plusieurs méthodes différentes pour tenir compte de la fabricabilité lors de l’optimisation topologique :
mindim – contrôle la plus petite taille qui doit être préservée lors de la recherche de la topologie, et minimise également l’effet de « damier » créé par le maillage tout en fournissant une conception plus discrète. Comme l’optimisation exige une valeur discrète de 1 ou 0 pour les éléments, cette contrainte améliore généralement la clarté de la conception en éliminant les éléments intermédiaires qui pourraient autrement se former.
draw direction – dans le processus de moulage ou de fraisage, il est impossible de créer des cavités qui ne sont pas ouvertes et orientées dans la direction de glissement du moule. Les conceptions issues de l’optimisation topologique contiennent souvent des cavités impropres au moulage ou au fraisage. Convertir une telle solution de conception en une conception fabricable peut être extrêmement difficile, voire impossible.
OptiStruct permet de définir des contraintes de direction d’extraction afin qu’une certaine topologie autorise le glissement du moule dans une direction donnée.
Deux options d’extraction sont disponibles :
- The “SINGLE” suppose qu’un seul moule sera utilisé, se déplaçant dans une direction d’extraction donnée. La surface inférieure de la pièce moulée est une partie de travail prédéfinie pour le moule.
- The “SPLIT” implique que deux moules seront utilisés pour mouler la pièce décrite dans cette carte DTPL, se séparant dans une direction d’extraction donnée.
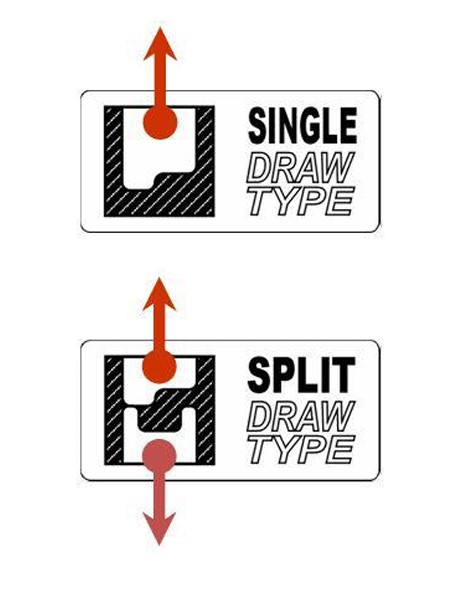
Figure 21 – différence entre draw single et draw split
Lors de l’utilisation de l’option d’extraction « SINGLE », des contraintes peuvent apparaître lors de la fabrication par emboutissage ou en tôle. Ce paramètre accélère l’évolution d’une structure interprétable comme une coque 3D, une zone de conception 3D. Cela permet de concevoir des coques 2D ou des pièces embouties à partir d’une zone de conception 3D, offrant une plus grande flexibilité de conception.
La pièce peut contenir non seulement une zone de conception mais aussi une zone hors conception. Ces zones hors conception doivent être définies comme des obstacles au processus. Cela préserve la possibilité de mouler la conception finale. Notons également qu’il existe une taille d’élément minimale par défaut pour l’utilisation avec les contraintes de direction d’extraction. Cette valeur est définie comme trois fois la taille moyenne de la cellule pour les composants correspondants. Ainsi, la densité de maillage du modèle et la fraction volumique requise doivent être choisies de sorte qu’il y ait assez de matière pour remplir les éléments de taille minimale par défaut. L’utilisateur peut spécifier la taille d’élément minimale souhaitée pour chaque partie de la structure.
Pattern repetition – est une technique qui permet de relier divers composants de la structure de manière à créer des motifs topologiques similaires.
Pattern grouping – liaison des variables de manière à former les formes structurelles souhaitées. Linéaires, planes, circulaires, radiales, etc. Les éléments structurels mis en forme sont contrôlés par des variables individuelles, ce qui garantit que la conception correspondra au motif souhaité. Les options de regroupement de motifs à un plan, deux plans, trois plans et à symétrie cyclique utilisent également une approche similaire pour assurer la création de la symétrie dans la solution.
Résultats d’optimisation du support en acier « aileron »
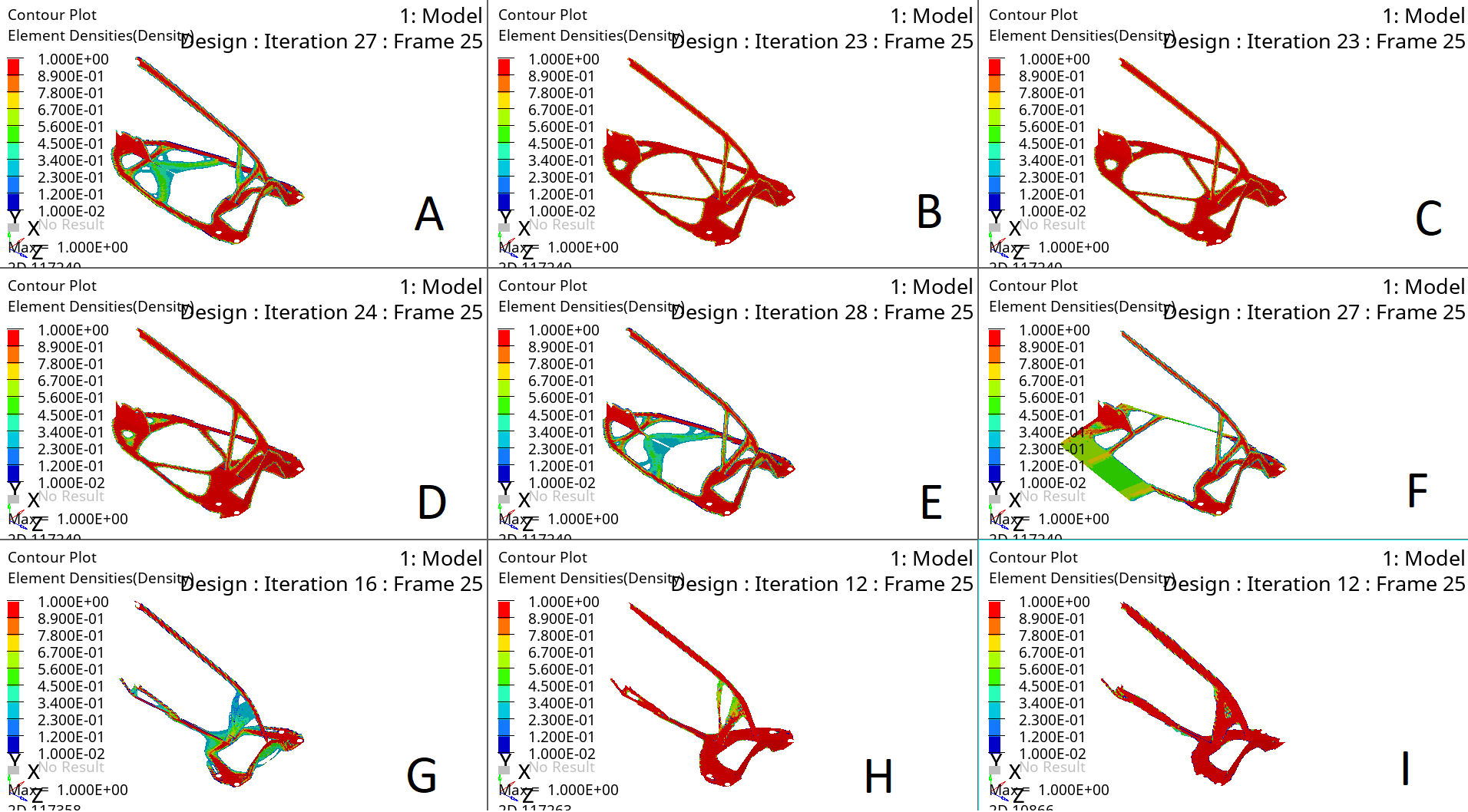
Figure 22 – variantes d’optimisation obtenues pour l’aileron
| A | B | C | D | E | F | G | H | I | |
|---|---|---|---|---|---|---|---|---|---|
| Matériau | Acier | Acier | Acier | Acier | Acier | Acier | Acier | Acier | Acier |
| Épaisseur | 8 | 6 | 5 | 4 | 3 | 6 | 15 | 8 | 6 |
| Nombre de charges | 6 | 6 | 6 | 6 | 6 | 2 | 1 | 1 | 1 |
Comme le montrent les motifs d’optimisation obtenus, le plan YZ du support est responsable de la rigidité en flexion du manipulateur autour de l’axe X. Il est recommandé de porter cette paroi à une épaisseur de 6 mm ; cette partie contribue le plus à la rigidité selon l’axe Y. Le plan XZ du support est responsable de la flexion autour de l’axe Y, et ce plan peut être réalisé avec une épaisseur de 3 mm. Le choix du contour précis et de son tracé ne dépend que de l’ingénieur. Les zones rouges sont les zones les plus sollicitées, tandis que la bordure jaune-vert représente des zones optionnelles, et c’est l’ingénieur qui décide de les inclure ou non.
Résultats d’optimisation du support en acier en forme de U
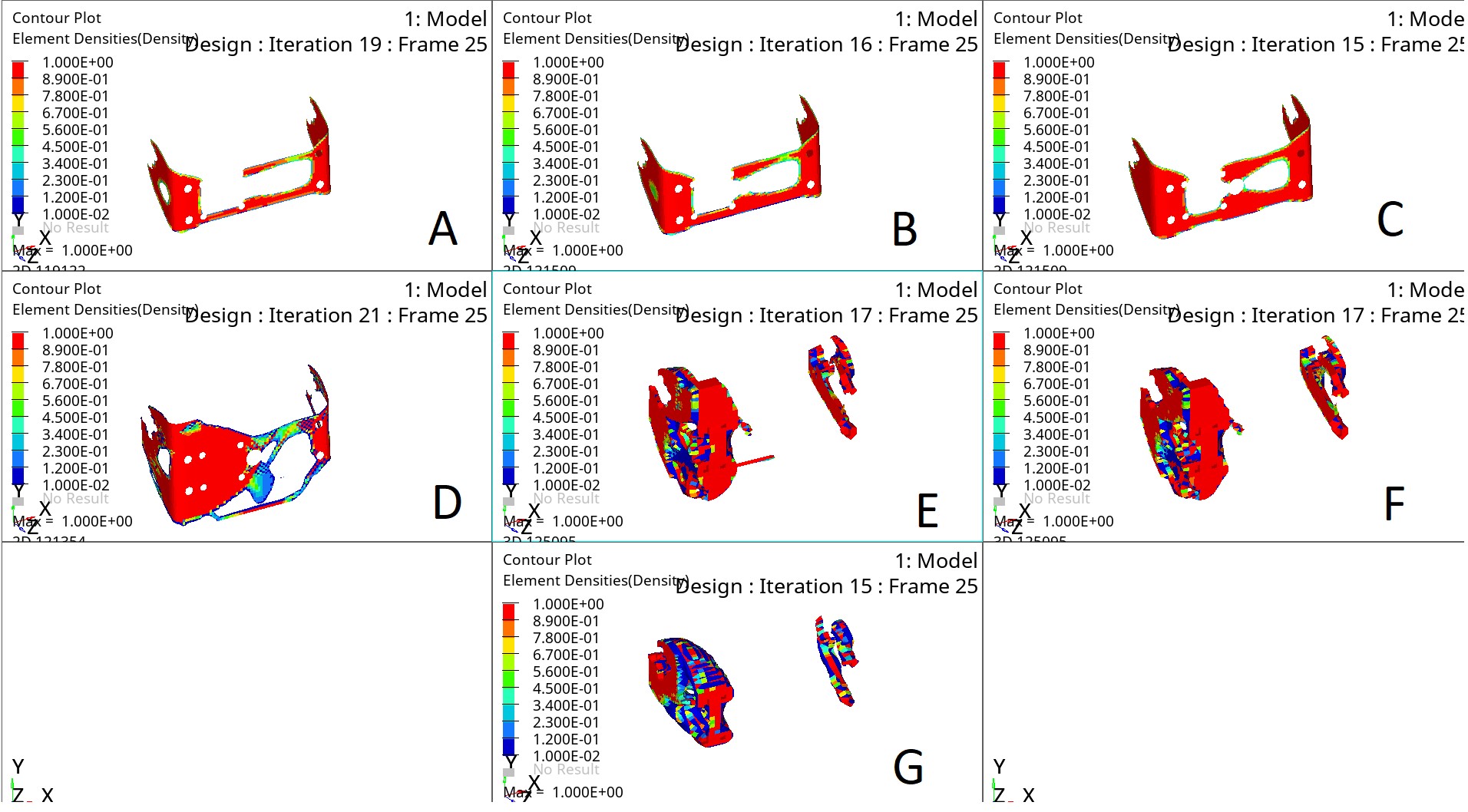
Figure 23 – variantes d’optimisation obtenues pour le support en acier en forme de U
| A | B | C | D | E | F | G | |
|---|---|---|---|---|---|---|---|
| Matériau | Acier | Acier | Acier | Acier | Acier | Acier | Acier |
| Épaisseur | 8 | 6 | 5 | 3 | |||
| Nombre de charges | 6 | 6 | 6 | 1 | 1 | 1 | 1 |
Comme le montrent les motifs d’optimisation obtenus du support en acier en forme de U, le trou central n’est pas sollicité. Il est également recommandé d’élargir la base du support et de porter l’épaisseur à 6 mm.
Résultats d’optimisation du support en aluminium
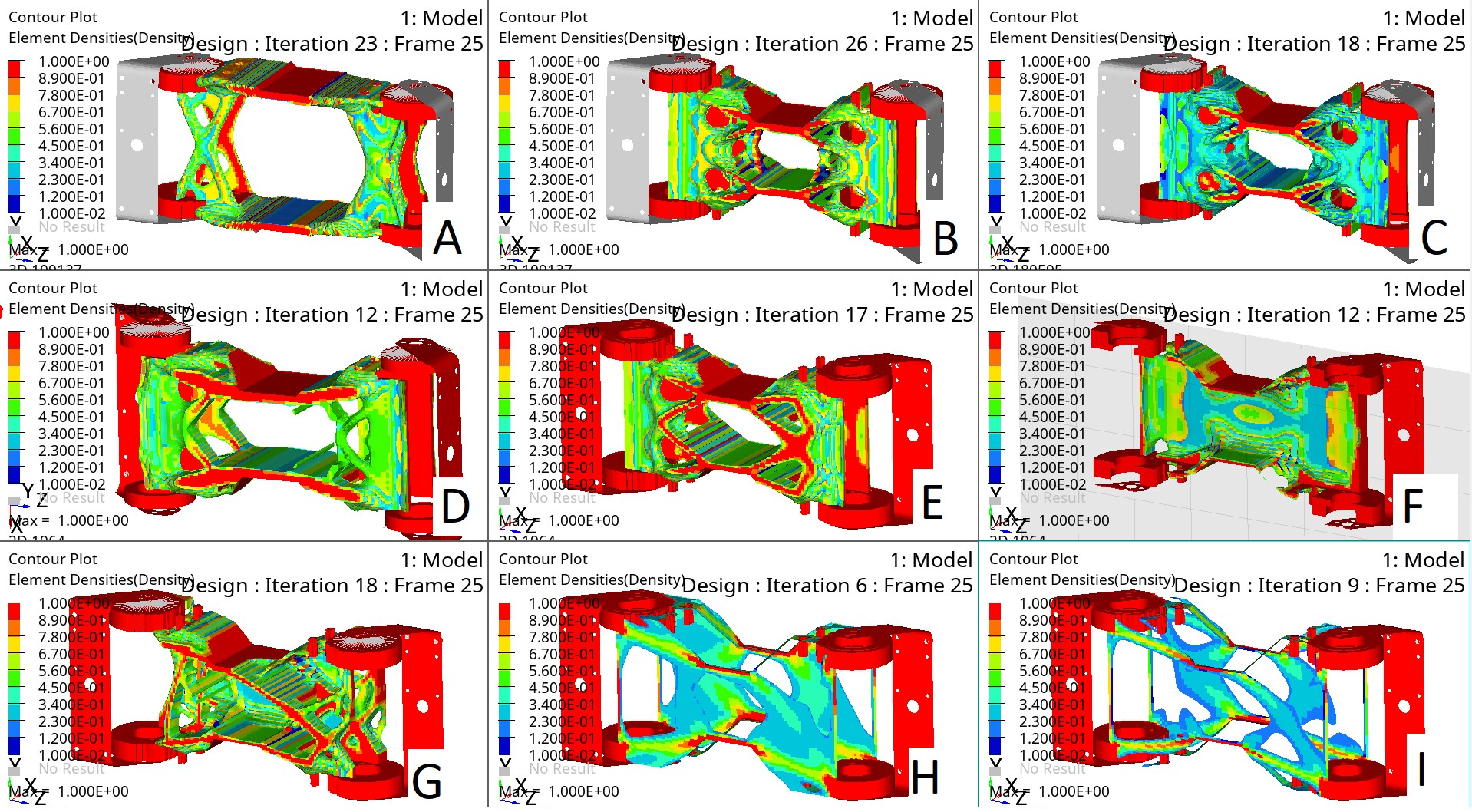
Figure 24 – variantes d’optimisation obtenues pour le support en aluminium
| A | B | C | D | E | F | G | H | I | |
|---|---|---|---|---|---|---|---|---|---|
| Matériau | Aluminium | Aluminium | Aluminium | Aluminium | Aluminium | Aluminium | Acier | Acier | Acier |
| Symétrie | yes | yes | yes | yes | yes | yes | no | yes | yes |
| Nombre de charges | 6 | 6 | 6 | 6 | 2 | 2 | 1 | 1 | 1 |
Comme le montrent les motifs d’optimisation obtenus, le remplacement du support en aluminium par de l’acier n’est pas possible en raison d’une masse trop faible. La plupart des motifs d’optimisation montrent qu’il est préférable de répartir la masse le long des parois. Il y a une explication à cela. Comme le manipulateur travaille en flexion, l’optimiseur tend vers la forme de section transversale la plus optimale en flexion, c’est-à-dire un profilé en I. Car la partie centrale est sous-sollicitée et les parties les plus extérieures contribuent le plus à la rigidité.

Figure 25 – la section transversale la plus rigide en flexion
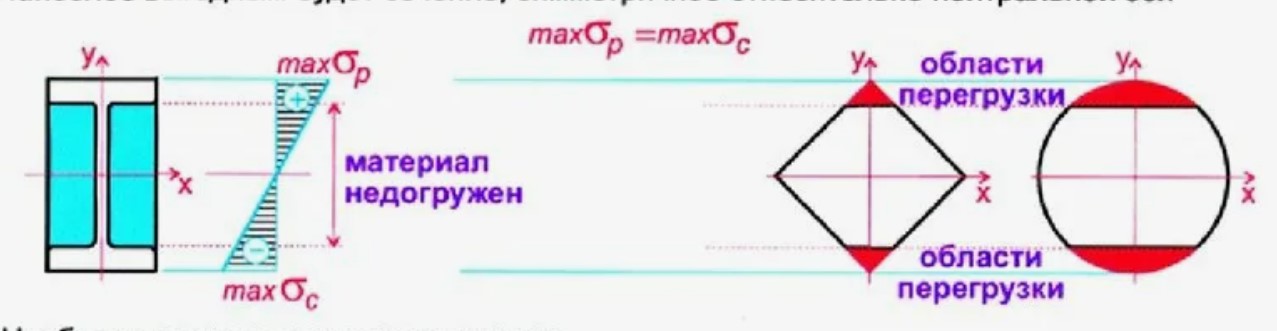
Figure 25 – la section transversale la plus rigide en flexion
Calcul de vérification
Après avoir choisi la forme, un calcul de vérification doit être effectué :

Figure 26 – MEF de la structure optimisée
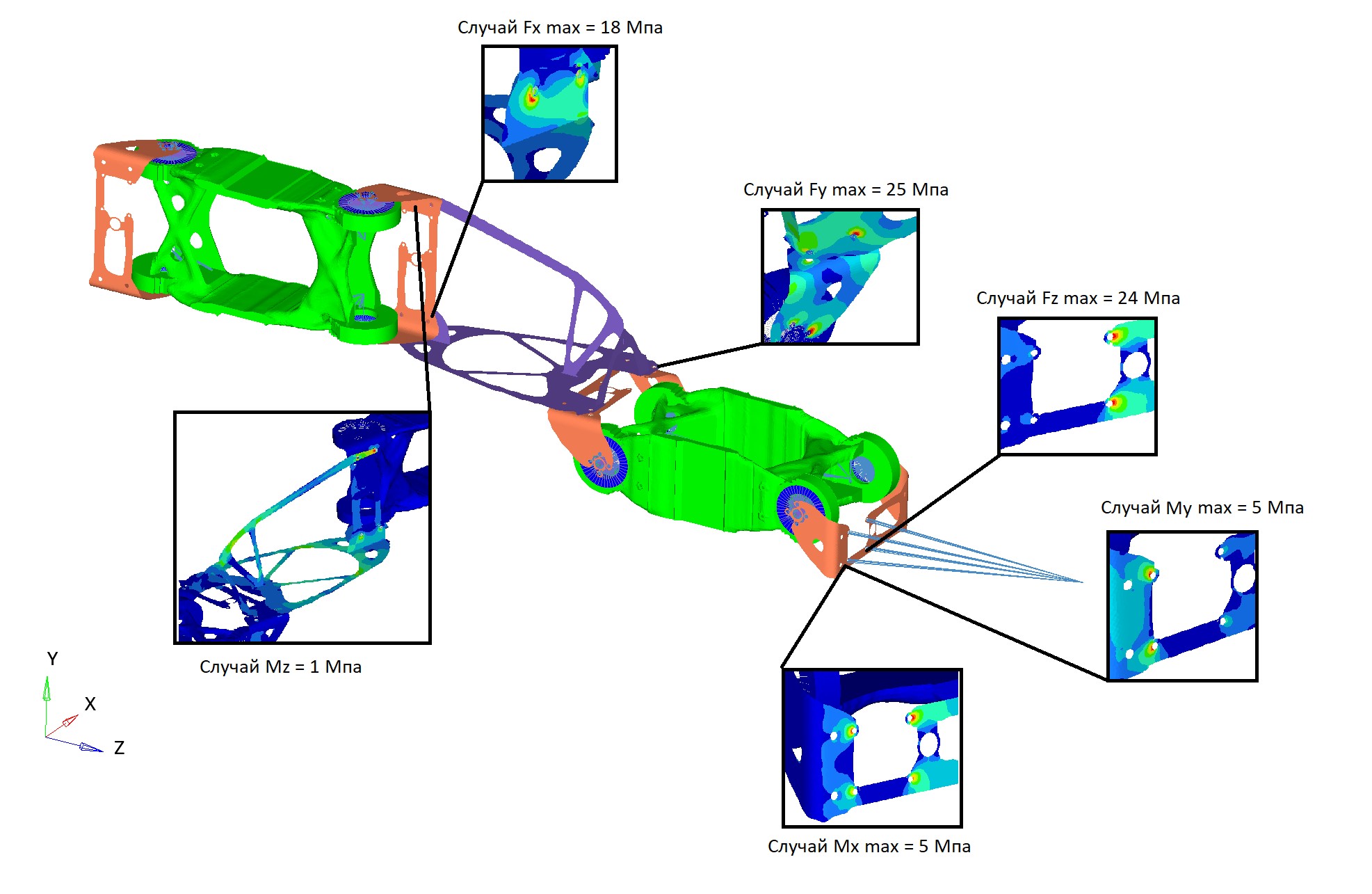
Figure 27 – résultats de calcul obtenus de la structure optimisée
Résultats de la conception optimisée
| Cas de chargement | Fx | Fy | Fz | Mx | My | Mz |
|---|---|---|---|---|---|---|
| Déplacement maximal (mm) | 0.41 | 0.31 | 0.21 | 0.04 | 0.05 | 0.01 |
| Contrainte maximale (MPa) | 18 | 25 | 24 | 5 | 5 | 1 |
Les contraintes maximales apparaissent aux nœuds de fixation des boulons aux pièces.

Figure 28 – version finale du manipulateur avec une rigidité structurelle accrue
Comparaison : conception d’origine et conception optimisée
| Paramètre | Conception d’origine | Conception optimisée |
|---|---|---|
| Masse | 1.937 kg | 2.376 kg |
| Contrainte max. | 93 MPa | 25 MPa |
| Flèche due à Fy | 1.05 mm | 0.41 mm |
| Flèche due à Fx | 1.03 mm | 0.31 mm |
| Flèche due à Fz | 0.62 mm | 0.21 mm |
| Flèche due à Mx | 0.12 mm | 0.04 mm |
| Flèche due à My | 0.17 mm | 0.05 mm |
| Flèche due à Mz | 0.03 mm | 0.01 mm |
Conclusions
Les exigences techniques n’ont pas été satisfaites; to ensure la rigidité requise, la masse admissible devrait être augmentée de plus de 15% par rapport à la valeur actuelle. Une amélioration significative de la rigidité a été obtenue : à la suite de l’optimisation topologique des éléments structurels clés, une réduction de la souplesse a été obtenue. Les déplacements du manipulateur ont diminué de 57–76% selon le cas de chargement.
L’indicateur cible n’a pas été atteint : malgré une amélioration significative, la flèche finale de l’extrémité du manipulateur (déplacement maximal 0,41 mm) a dépassé la valeur exigée par les exigences techniques (pas plus de 0,3 mm). Ainsi, l’exigence principale du cahier des charges n’a pas pu être pleinement satisfaite.
Recommandations pour atteindre les paramètres requis
Pour atteindre les paramètres requis, envisagez les options suivantes :
- Augmenter la masse admissible au-delà de la contrainte actuelle de 15%
- Augmenter le nombre d’éléments structurels non identiques, en allégeant chaque élément structurel successif à partir de la base de fixation du manipulateur
- Remplacer les supports en aluminium par des supports en acier – l’aluminium ayant un module d’élasticité de 70 GPa et l’acier 200 GPa, cela augmentera la rigidité de la pièce de 2,5 fois sous la même charge
- Envisager des matériaux alternatifs ayant un module d’élasticité plus élevé que l’aluminium et une densité plus faible que l’acier
- Déplacer le centre de masse aussi près que possible de la base afin de réduire les moments d’inertie
Efficacité de la méthode d’optimisation
L’application de la méthode d’optimisation topologique a prouvé son efficacité pour trouver la répartition optimale de la matière dans des zones de conception données (Des space). La méthode a permis d’identifier les zones sollicitées et non sollicitées des pièces et de formuler des recommandations concrètes pour modifier leur géométrie. La fabricabilité des solutions n’est toutefois pas la meilleure.
Solutions de conception concrètes obtenues
Pour chacun des trois supports optimisés, des variantes ont été obtenues, à partir desquelles de nouvelles géométries ont été développées. Il est important de comprendre que, lors du tracé des éléments structurels, la masse sera supérieure à la valeur calculée, en raison des frontières floues des formes obtenues, alors que lors du tracé une frontière nette est définie.
For the steel U-shaped bracket: Il est recommandé d’élargir la base et de porter à 6 mm l’épaisseur de la paroi responsable de la rigidité en flexion.
For the aluminum bracket: L’optimiseur a montré l’intérêt de répartir la masse le long des parois, en tendant vers une forme de profilé en I.
For the steel “fin” bracket: Il est recommandé de porter l’épaisseur de la paroi verticale à 6 mm. La base peut être laissée à 3 mm ou portée à une épaisseur de 6 mm.
Vérification de la résistance
Le calcul de vérification de la structure optimisée a montré que les contraintes maximales dans les pièces ont nettement diminué (de 93 MPa à 25 MPa), ce qui est largement inférieur à la limite d’élasticité des matériaux et offre une marge de sécurité accrue. Dans le même temps, la contrainte de masse a été respectée (augmentation de pas plus de 15%).
Conclusion finale
Une structure de manipulateur plus rigide et plus résistante a été obtenue, qui ne satisfait toutefois pas pleinement à l’exigence initiale d’une flèche ≤ 0,3 mm. Les résultats et la méthodologie obtenus constituent une base solide pour de futures itérations de conception visant à satisfaire pleinement aux exigences techniques, éventuellement grâce à l’emploi de matériaux plus rigides ou à des modifications supplémentaires du schéma cinématique.
passer en alu sur les segments de base a tout changé sur mon montage, le plastique fléchissait trop
le maillon faible c’est presque toujours la liaison, pas le segment lui-même
vous mesurez la déflexion comment, avec un comparateur en bout de bras ?
Oui, comparateur en bout d’effecteur avec une charge calibrée appliquée à différentes poses. On répète sur plusieurs configurations articulaires, car la rigidité varie énormément selon l’extension du bras.
C’est clair maintenant, merci.
Excellente analyse de la déflexion. Le passage sur le compromis masse/rigidité aux articulations est particulièrement pertinent, c’est souvent là que tout se joue et que les conceptions DIY pèchent.