
Practical Comparison of Smart Serial Servo Motors for Robotics
We bench-tested five popular smart serial servos — STS3215, STS3235, STS3250, HLS3930M and HLS...
Boris Kotov
11 Jun 2026
We bench-tested five popular smart serial servos — STS3215, STS3235, STS3250, HLS3930M and HLS...
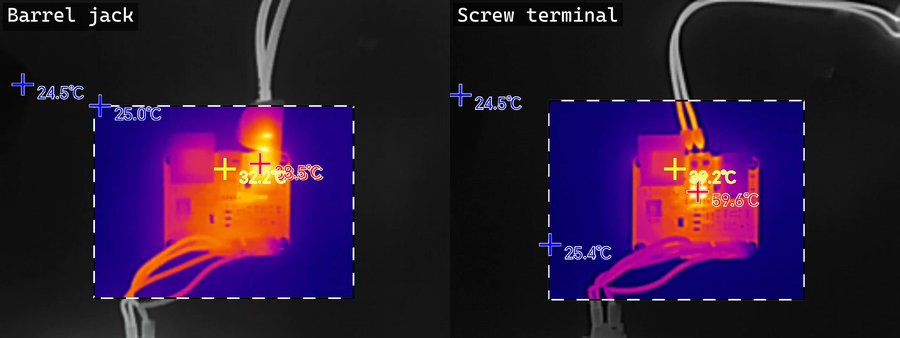
Empirical thermal load testing of two Waveshare serial-bus servo driver boards across four scenarios...
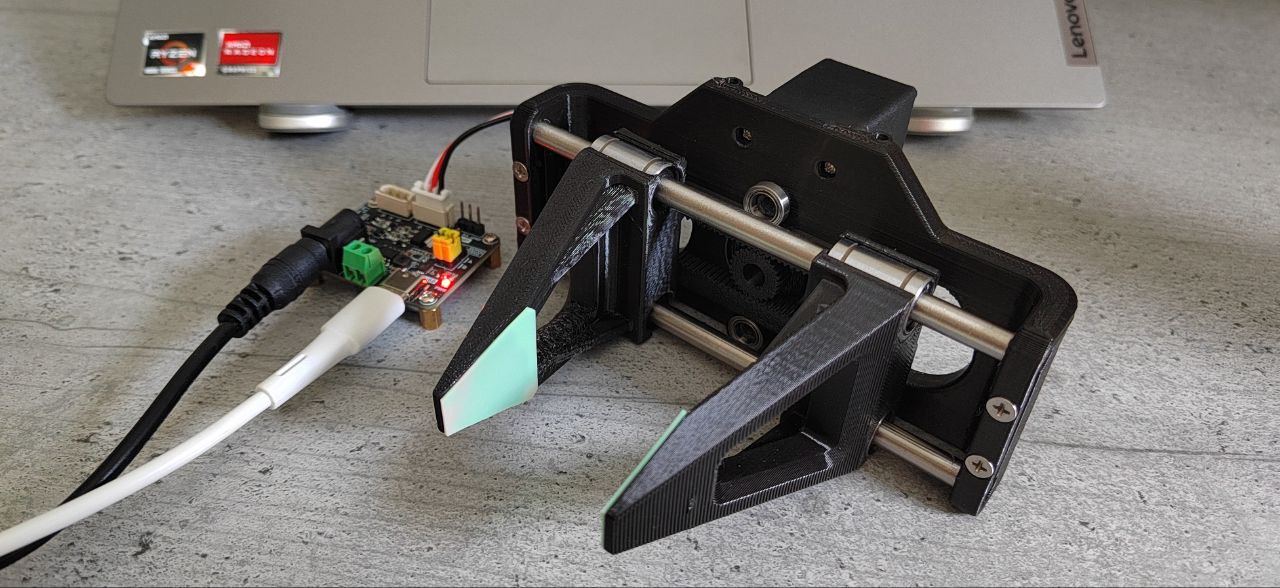
This work presents a practical backlash compensation method for Feetech STS3215 servo actuators usin...
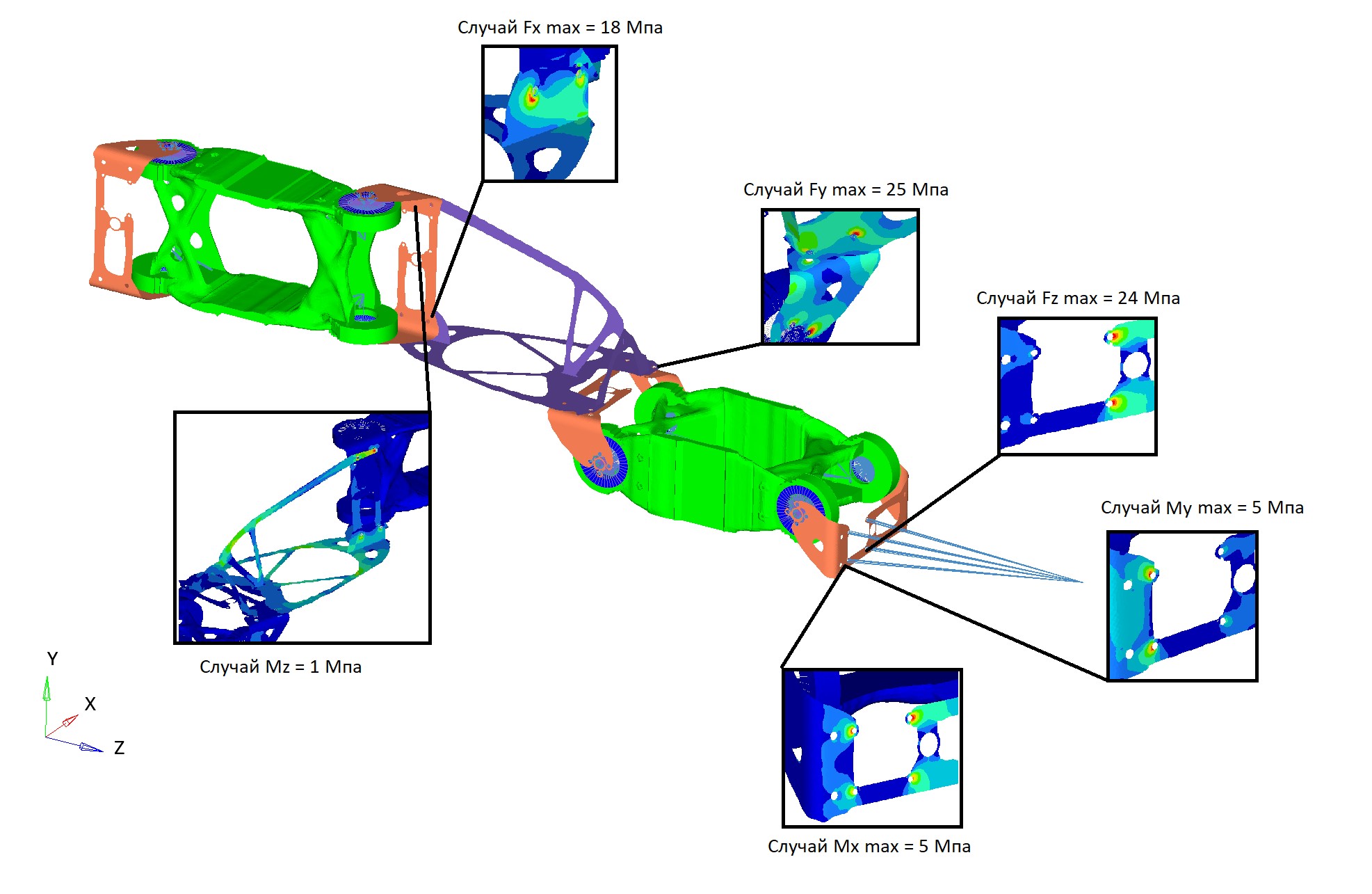
This study presents topology optimization of a robotic manipulator using the SIMP algorithm to incre...

Comprehensive empirical evaluation of the Feetech STS3250 serial bus servo motor. Performance testin...

A detailed look at the Feetech STS3215 servo — exploring its real-world performance, precision, and ...
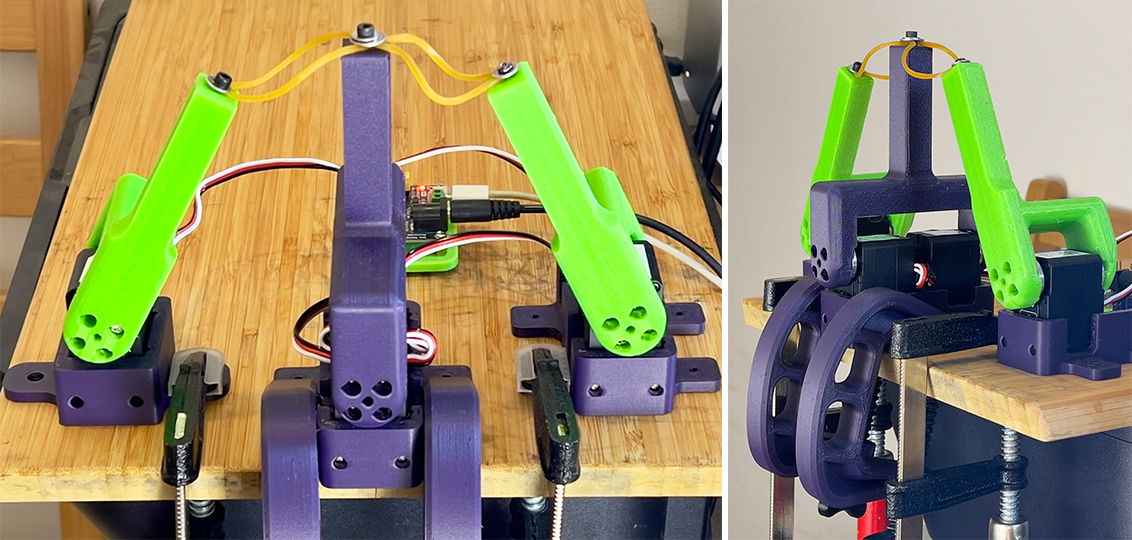
A gripper is a mechanical or robotic device designed to grasp, hold, manipulate, or transport object...
I want to discuss how the selection of the most important component of the robotic manipulator – the...
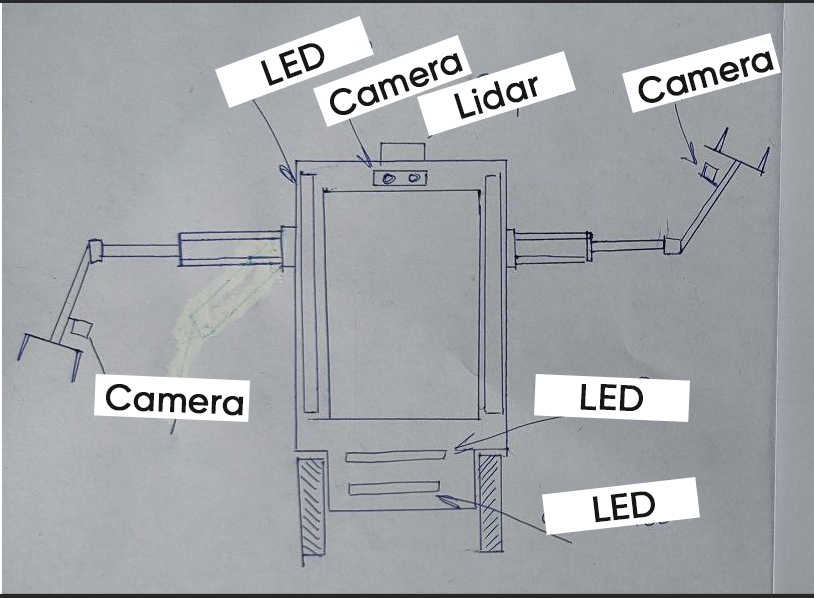
In May, we completed the first variation of the Robo 9 design, showcasing its evolution from initial...
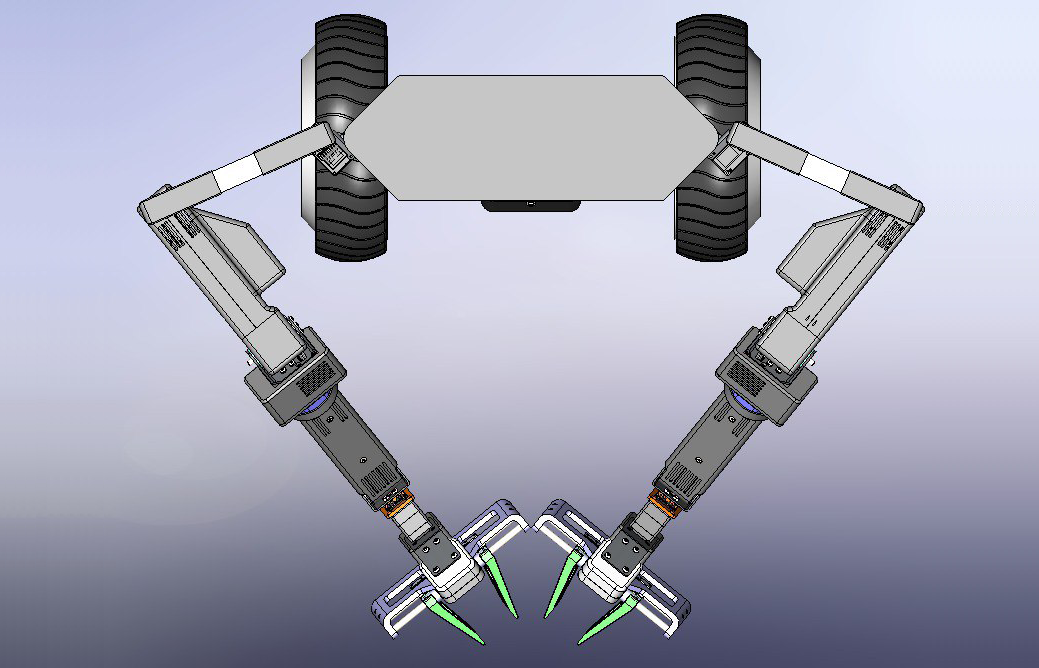
In the last two months, we advanced the Robo 9 research robot, finalizing its structure and dual man...
We value your privacy
We use cookies to enhance your browsing experience, serve personalised ads or content, and analyse our traffic. You can accept all, reject non-essential ones, or choose which cookies to allow. Privacy Policy
Manage cookie preferences
Required for the site to function and cannot be switched off.
Help us understand how visitors use the site.
Used to deliver relevant ads and measure their performance.
Enable enhanced functionality and personalisation.