Education Robot Development Update
 2125
2125
I would like to share the progress made over the past two months. We have completed most of the design work on the manipulators and finalized the main structure of the robot.
Grippers
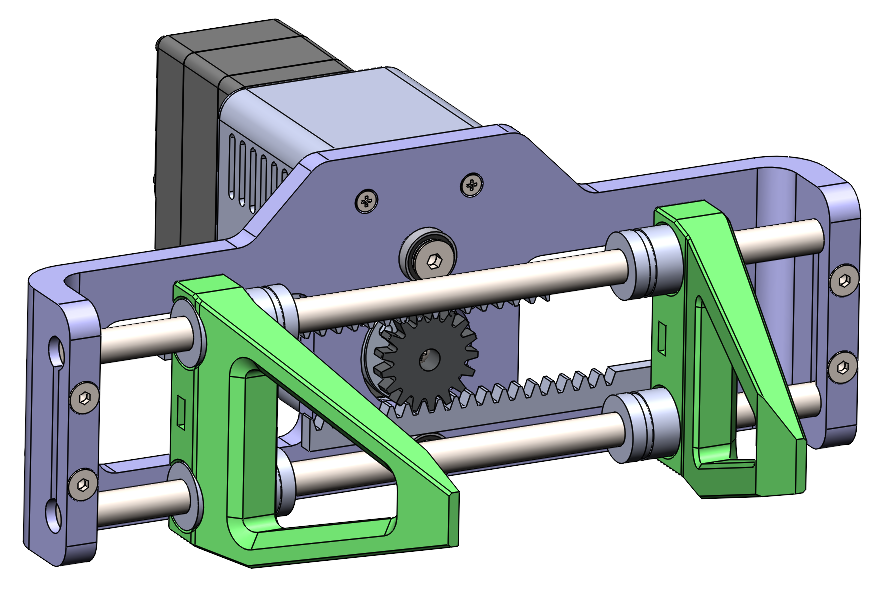
Parallel gripper design
After considering various options, we decided to stick with a parallel gripper design, as it is the lightest, easiest to produce, and capable of handling a variety of objects with different shapes.
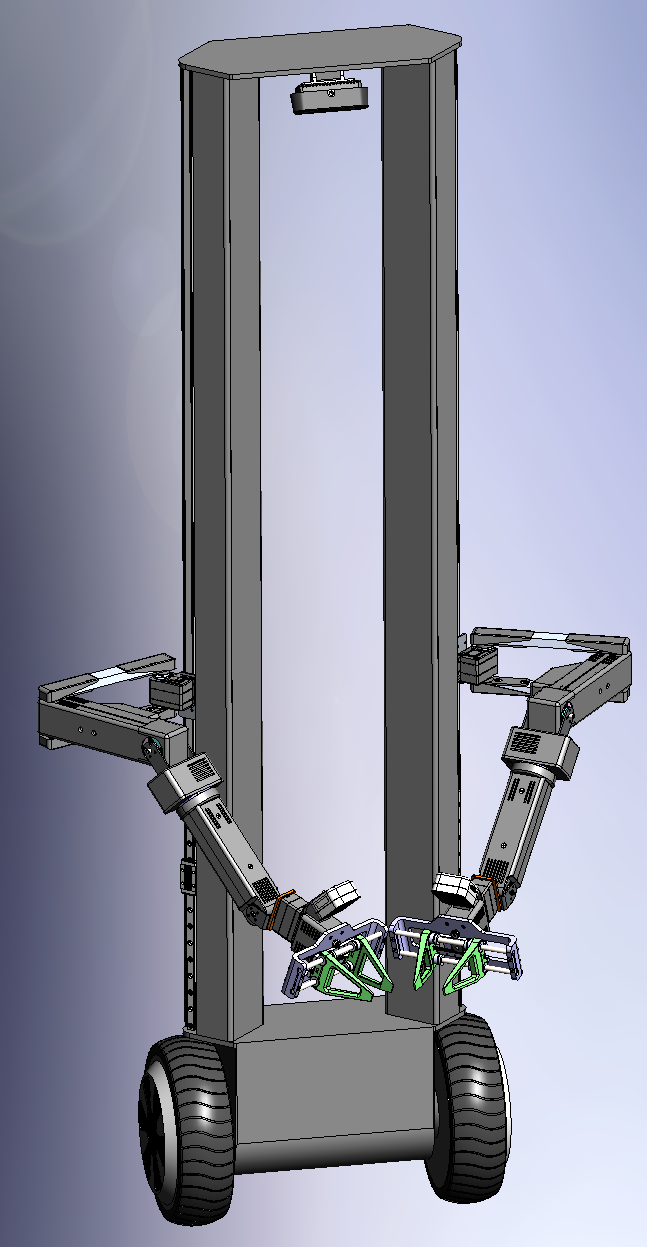
Manipulators
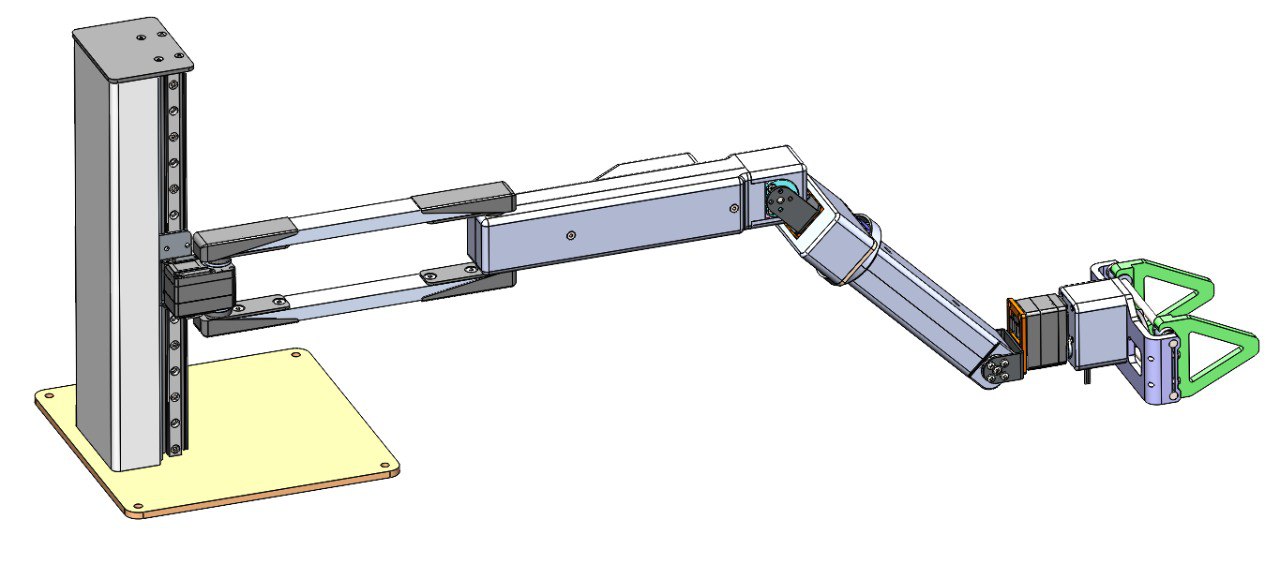
Robot arm
- We decided to use a semi-gantry, semi-serial design for the manipulator. Which allows us to maintain a balance between the required torque of the engines and the number of degrees of freedom.
- For the motors, we chose the Feetech 3215 and Feetech 3250 servo motors, as they are lightweight, low-cost, and offer high torque along with magnetic encoders.
- The length of the manipulator will be approximately 650 mm, and the estimated payload capacity is between 1.5 to 3 kg.
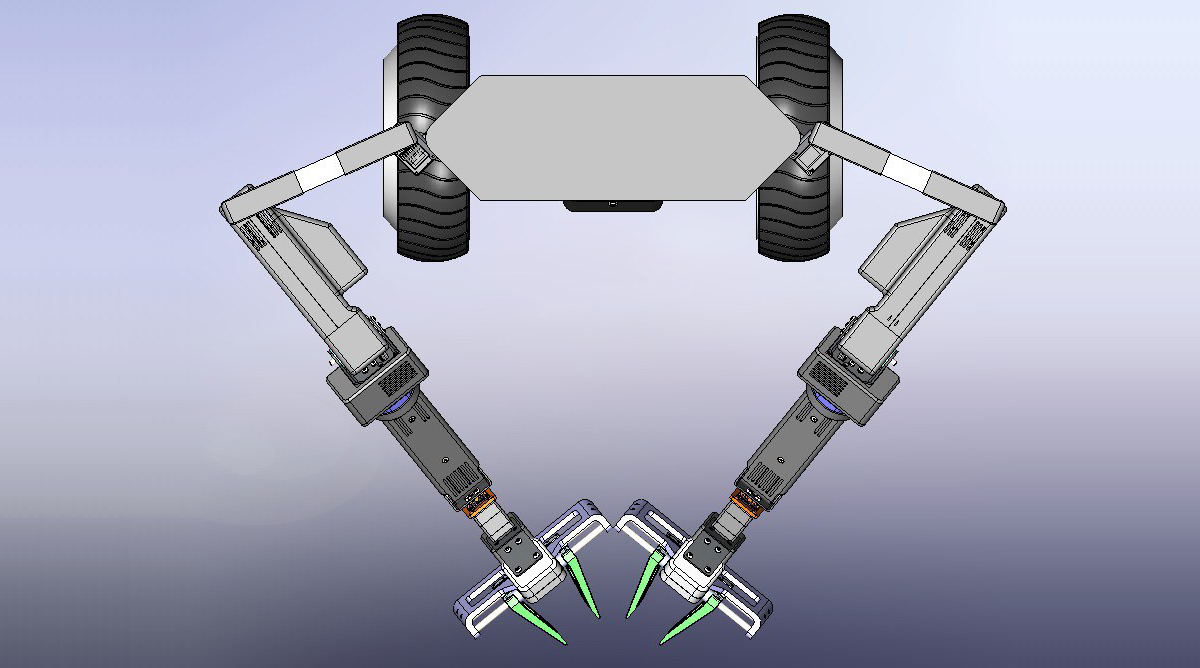
The current main characteristics of the robot are
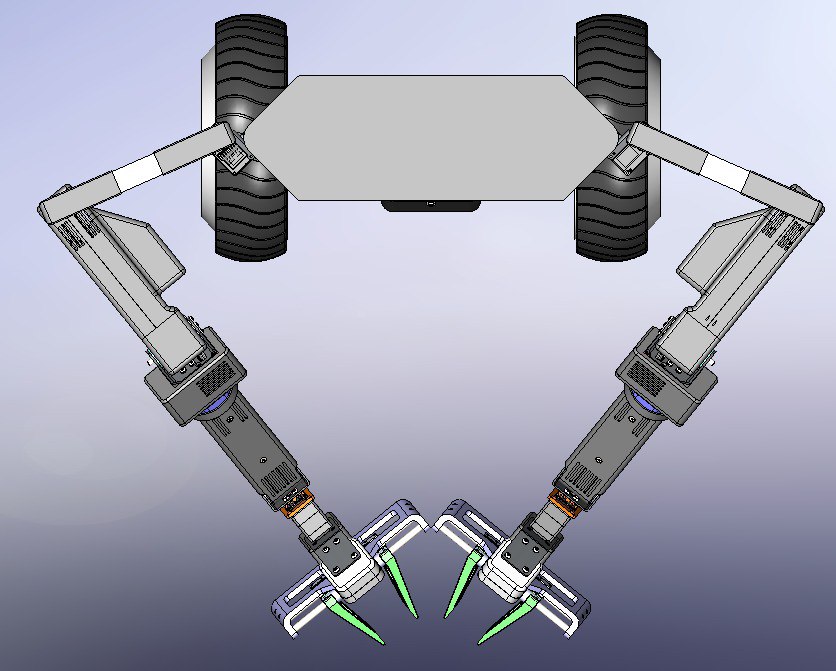
– Movement type – similar to a Segway.
– Ability to lift manipulators to a height of up to 1400 mm.
– Payload capacity of each manipulator – 1500 g.
– Length of the manipulators – 650 mm.
– The chosen direction for the first version of the robot is an exploratory robot for schools, universities, and laboratories.
In May, I plan to publish a render of the concept of the future robot, which will closely reflect the future design.
love the progress, my students would tear through these so build them tough!! 😄
as a teacher the thing i care about most is repair time between classes, when something breaks mid-lesson i need to swap it in two minutes not send it off, hoping the modular design really delivers on that
will there be a curriculum to go with it or just the hardware? thats the make-or-break for schools
There’s a curriculum coming alongside the hardware — lesson plans and exercises that scale from middle school to undergrad. We agree it’s the part that decides whether a robot actually gets used in class.
this is exactly what classroom robotics has been missing, durable and actually open