April 25 Update
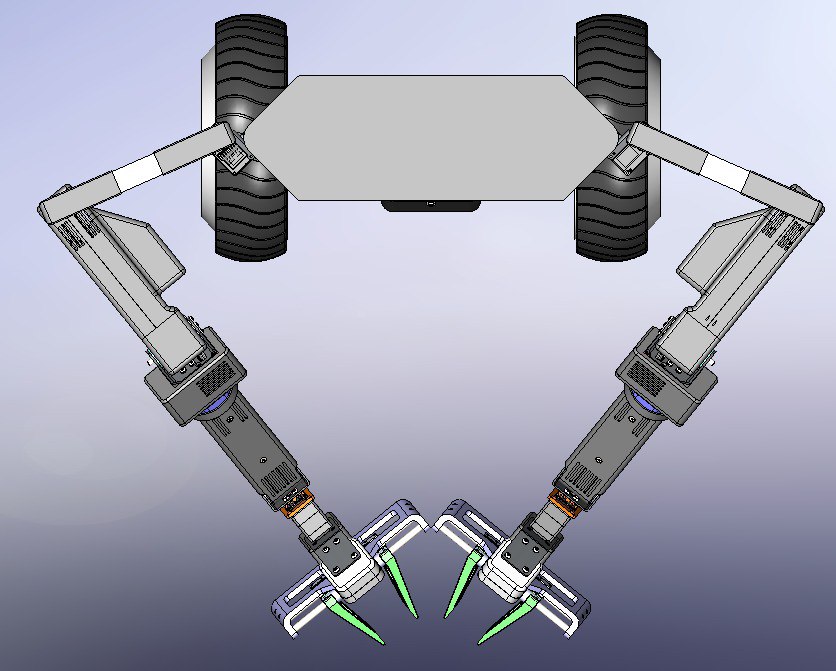
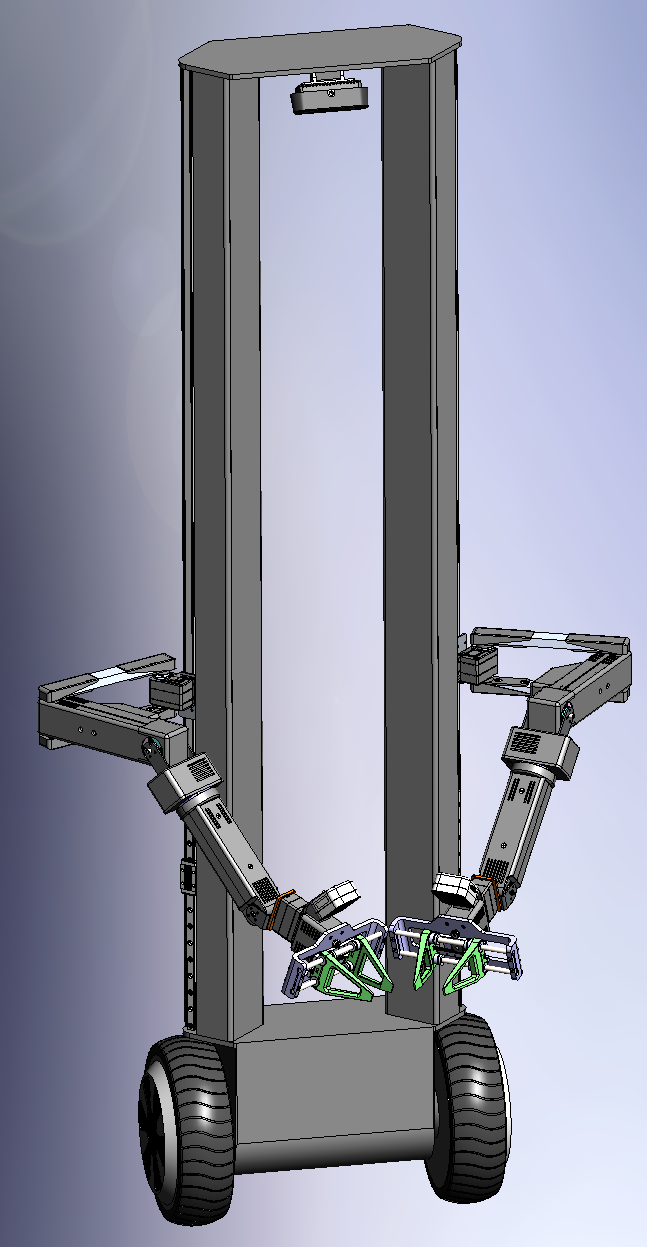
I would like to share the progress made over the past two months. We have completed most of the design work on the manipulators and finalized the main structure of the robot. The current main characteristics of the robot are:
– Movement type – similar to a Segway.
– Ability to lift manipulators to a height of up to 1400 mm.
– Payload capacity of each manipulator – 1500 g.
– Length of the manipulators – 650 mm.
– The chosen direction for the first version of the robot is an exploratory robot for schools, universities, and laboratories.
In May, I plan to publish a render of the concept of the future robot, which will closely reflect the future design.
Log in to leave a comment.