Prueba de placas controladoras de servos de bus serie Waveshare bajo carga
 579
579

El objetivo de esta prueba era evaluar el comportamiento de distintas placas controladoras de servos bajo una variedad de condiciones de carga, desde el funcionamiento típico hasta los escenarios pico del peor caso. Esto ayuda a garantizar un comportamiento fiable en el uso real, sobre todo cuando un brazo robótico se somete a cargas altas repentinas o sostenidas.
En nuestros proyectos solemos utilizar hasta seis servos por sistema. Según la configuración, esto puede incluir una combinación de servos Feetech STS3250 y STS3215. El STS3250 tiene una corriente de bloqueo de aproximadamente 4,2 A, mientras que el STS3215 alcanza alrededor de 2,7 A. En montajes mixtos, la demanda de corriente combinada puede aumentar considerablemente, sobre todo durante el movimiento simultáneo o en condiciones cercanas al bloqueo.
Al mismo tiempo, el fabricante no ofrece especificaciones claras ni detalladas sobre la capacidad de potencia de las placas controladoras, por lo que resulta difícil determinar los límites seguros de funcionamiento basándose solo en la documentación. Se requieren pruebas prácticas para entender cómo se comportan estas placas en condiciones reales, tanto en funcionamiento nominal como en escenarios de carga más exigentes.
Se evaluaron cuatro escenarios de prueba de carga:
- Carga continua elevada: 2 A durante 10 minutos. En condiciones normales de funcionamiento no se espera que el brazo robótico supere este nivel. Verifica que las placas soporten cargas típicas sin sobrecalentarse.
- Carga continua máxima: 5 A durante 5 minutos. Funcionamiento sostenido bajo carga alta, cercana al límite superior práctico de muchos escenarios reales con varios servos funcionando simultáneamente.
- Carga pico: 7 A durante 2 minutos. El pico máximo esperado. En la práctica, el brazo solo alcanza este nivel en ráfagas cortas (1–2 segundos) en condiciones exigentes, pero la prueba de duración prolongada aporta un margen de seguridad adicional.
- Límite de la fuente de alimentación: 10 A durante 30 segundos. Simula un fallo o una condición extrema en la que se alcanza el límite de corriente de la fuente de alimentación. Se espera que las placas resistan este escenario sin sufrir daños.
En la comparación se incluyeron dos placas disponibles comercialmente:
- Waveshare Serial Bus Servo Driver Board — un controlador compacto y asequible para servos de bus serie, dentro del rango económico y destinado a proyectos de robótica generales.
- Waveshare Serial Bus Servo Driver HAT — un HAT compatible con Raspberry Pi que integra el control de servos directamente con un sistema anfitrión, ofreciendo comodidad para montajes de robótica embebidos y basados en SBC a un precio moderado.
Todas las pruebas se realizaron a una temperatura ambiente de aproximadamente 26 °C. La carga se conectó a través de los conectores de motor en paralelo utilizando el cableado de motor de serie para reproducir fielmente el caso de uso previsto. En todas las pruebas se usó de forma constante una única fuente de alimentación de banco ajustada a 12 V. Como carga se empleó un cargador de baterías LiPo ajustable de 500 W. Para las pruebas de 2 A se utilizó una carga electrónica de 35 W.
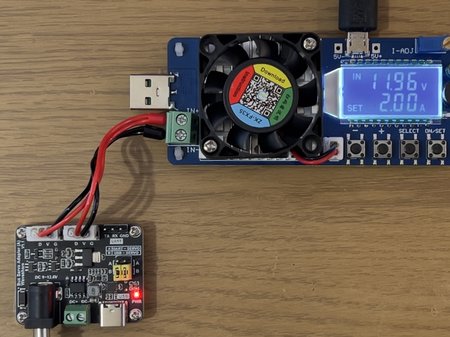
Montaje de banco utilizado para las pruebas de carga continua de 2 A; una carga electrónica de 35 W consume corriente a través de los conectores de motor de la placa a unos 12 V regulados. |

Montaje de banco utilizado para los escenarios de mayor corriente; un cargador de baterías LiPo ajustable de 500 W actúa como carga, alimentado a 12 V desde una única fuente de banco a través de los conectores de motor en paralelo de la placa. |
Montaje de prueba. Izquierda: pruebas de carga de 2 A; derecha: pruebas de carga de 5 / 7 / 10 A.
A lo largo de todas las pruebas, las temperaturas de los componentes clave de la placa se monitorizaron con una cámara térmica para identificar posibles puntos calientes y verificar los límites seguros de funcionamiento.
Waveshare Serial Bus Servo Driver Board
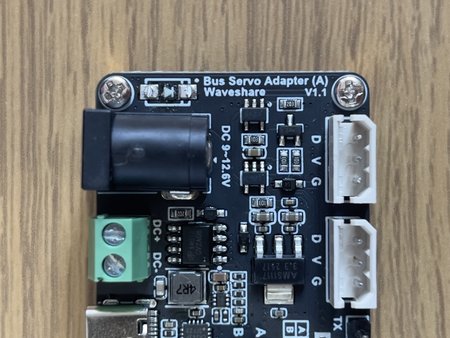
La Waveshare Serial Bus Servo Driver Board es un controlador compacto diseñado para servos de bus serie de las series Feetech STS y Waveshare ST. Cuenta con una interfaz USB Type-C para la conexión directa a un PC anfitrión, lo que la hace cómoda para el desarrollo y las pruebas. La placa ofrece dos opciones de entrada de alimentación —un conector de barril de 5,5×2,1 mm y una borna de tornillo—, lo que aporta flexibilidad según el montaje de alimentación. Además de la interfaz USB, dispone de una salida UART dedicada que permite conectar la placa a un microcontrolador externo para aplicaciones embebidas.
- Documentación: https://docs.waveshare.com/Bus_Servo_Adapter_A
- Esquema: Esquema del Bus Servo Adapter (A)
Revisiones
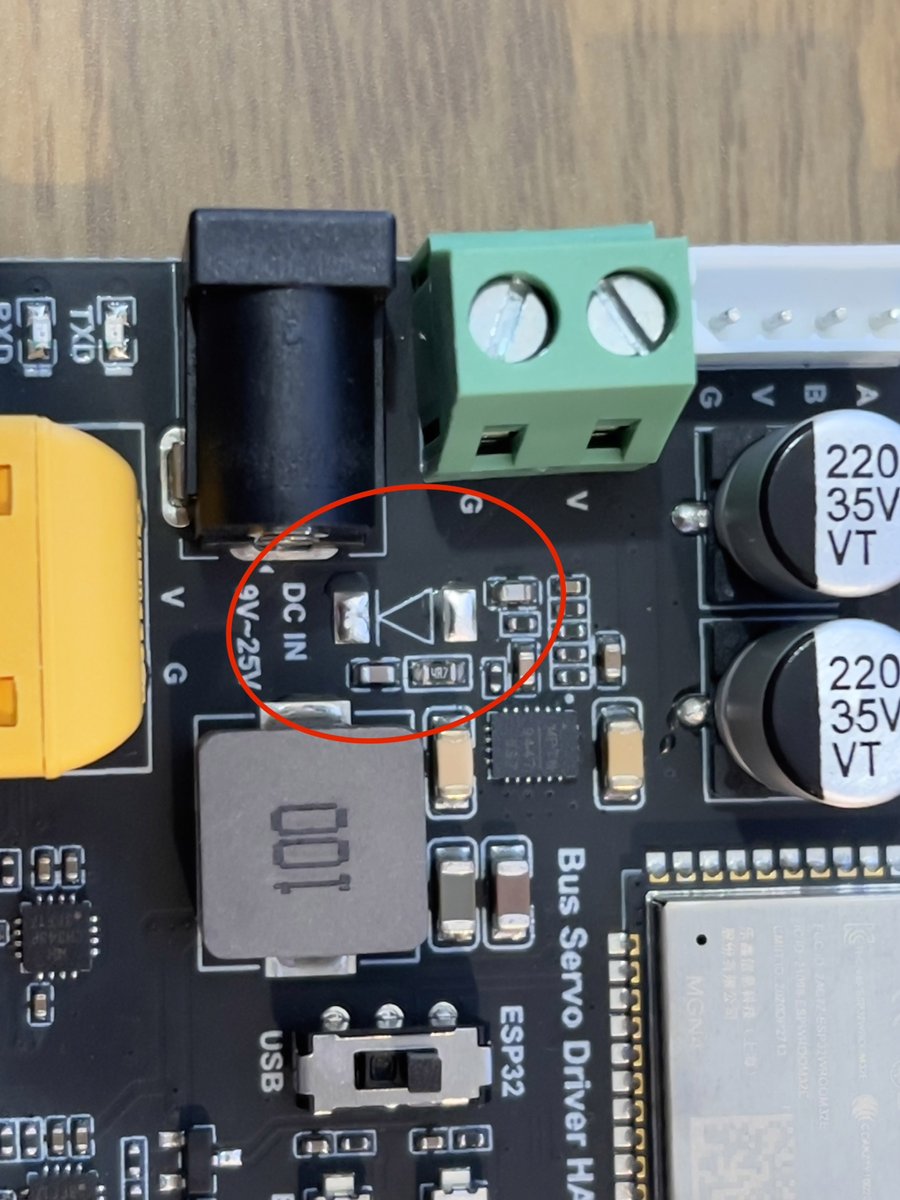
Esta placa tiene al menos dos revisiones. La revisión 1.1 (la última revisión conocida) incluye un diodo TVS adicional. El diodo parece ser relativamente sensible a la calidad de la alimentación: con conectores de alimentación flojos o de mala calidad, puede quemarse. Si el diodo se quema, puede retirarse por completo para restablecer la funcionalidad de la placa.

Revisiones de la placa una al lado de la otra: la original v1.0 (izquierda) y la v1.1 (derecha). El rectángulo rojo señala el diodo TVS añadido en la v1.1.

Primer plano de una placa de la revisión 1.1 tras fallar el diodo TVS; el diodo quemado deja la placa inutilizada hasta que se retira físicamente. |
La misma placa con el diodo TVS averiado retirado físicamente: la placa vuelve a funcionar sin el circuito de protección. |
Revisión 1.1 de la placa con un diodo TVS. Izquierda: el diodo se ha quemado. Derecha: el diodo se retiró para restablecer la funcionalidad.
Conectores de alimentación
La placa ofrece dos opciones de entrada de alimentación: un conector de barril de 5,5×2,1 mm y una borna de tornillo. Aunque ambos conectores cumplen la misma función, siguen rutas ligeramente distintas en la placa, lo que se traduce en un comportamiento notablemente diferente bajo carga.
Conector de barril (5,5×2,1 mm): Ofrece una ruta de alimentación directa a las salidas de motor. Tanto el terminal positivo como el negativo van cableados directamente a los pines de los conectores de motor, con los dos conectores de motor en paralelo. Esto da lugar a una caída de tensión y a una generación de calor mínimas a lo largo de la ruta, lo que la convierte en la opción más robusta para cargas de mayor corriente.
Bornas de tornillo (DC+ / DC−): Proporcionan un método de entrada alternativo, pero introducen componentes adicionales en la ruta de alimentación. En lugar de alimentar directamente las salidas de motor, la potencia de entrada se encamina a través de un MOSFET antes de llegar a los conectores de motor. Con cargas más altas, este MOSFET se convierte en una fuente importante de calor, lo que puede afectar a la eficiencia general y al comportamiento térmico. Aunque las bornas están nominalmente clasificadas hasta 10 A, su tamaño relativamente pequeño las hace menos adecuadas en la práctica para un funcionamiento sostenido a alta corriente.
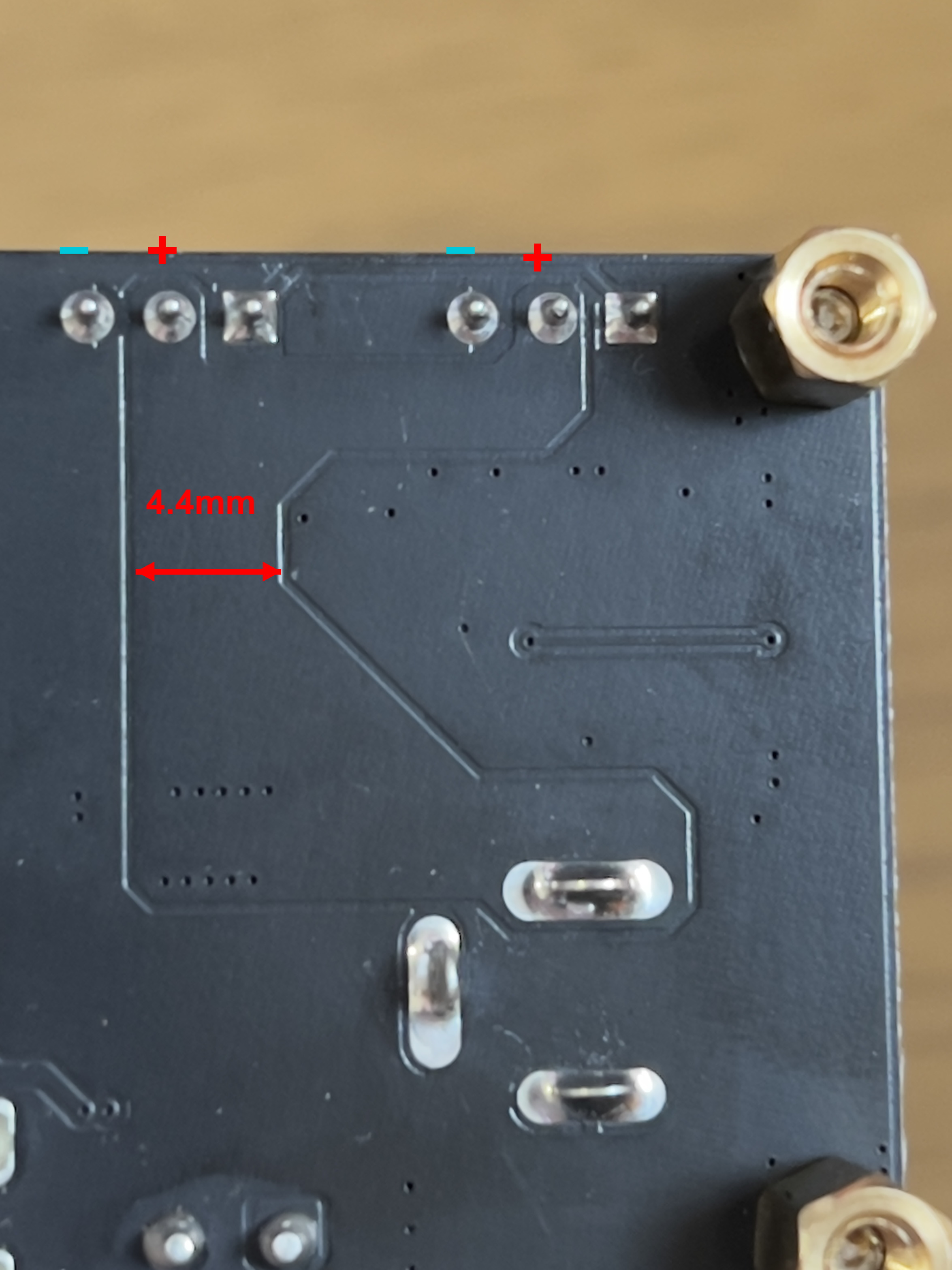
El polígono de cobre DC+ tiene 4,4 mm de ancho y se espera que soporte sin problemas las corrientes de carga pico. Las marcas + / − indican la polaridad de la borna de tornillo.
Pruebas de carga
Debido a las diferencias en la circuitería de alimentación, las pruebas se realizaron por separado para las entradas por conector de barril y por borna de tornillo.
Carga de 2 A durante 10 minutos
Imágenes térmicas en paralelo cerca del final de la prueba de 2 A / 10 min. Ambas rutas se mantienen a 30–33 °C: no hay diferencia apreciable con esta carga.
Izquierda: conector de barril. Derecha: borna de tornillo.
La prueba de carga continua de 2 A no presentó problemas. La placa apenas se calentó, y la mayoría de los componentes se mantuvieron cerca de la temperatura ambiente. La imagen térmica confirmó solo incrementos de temperatura menores en toda la placa, normalmente en el rango de 30–33 °C, lo que indica bajas pérdidas de potencia y un manejo eficiente de la corriente en condiciones normales de funcionamiento.
Carga de 5 A durante 5 minutos
Imágenes térmicas en paralelo cerca del final de la prueba de 5 A / 5 min. Conector de barril (izquierda): el conector a ~38–40 °C. Borna de tornillo (derecha): el MOSFET a ~60 °C, la principal fuente de calor.
Izquierda: conector de barril. Derecha: borna de tornillo.
Cuando se alimentó a través del conector de barril, el propio conector se calentó de forma apreciable, alcanzando alrededor de 38–40 °C. El resto de la placa se mantuvo relativamente fría, con la mayoría de los componentes cerca de 30–32 °C. Esto indica que la principal limitación en esta configuración es el conector y su resistencia de contacto, más que la ruta de alimentación interna de la placa.
Al usar las bornas de tornillo, el comportamiento térmico estuvo dominado por el MOSFET integrado. Su temperatura subió con relativa rapidez bajo carga y se estabilizó en torno a los 60 °C tras varios minutos. Otras zonas de la placa se mantuvieron moderadamente templadas (30–40 °C). Esto confirma que, en esta configuración, el MOSFET es la principal fuente de disipación de potencia y de generación de calor.
En conjunto, aunque ambos métodos de entrada soportaron la carga de 5 A sin fallar de inmediato, presentan cuellos de botella térmicos distintos: el conector de barril está limitado por el calentamiento del conector, mientras que la ruta por borna de tornillo está limitada por las pérdidas del MOSFET.
Carga de 7 A durante 2 minutos
Imágenes térmicas en paralelo al final de la prueba de 7 A / 2 min. Conector de barril (izquierda): el conector a ~46 °C. Borna de tornillo (derecha): el MOSFET a ~78–80 °C, acercándose al límite de fiabilidad a largo plazo.
Izquierda: conector de barril. Derecha: borna de tornillo.
Cuando se alimentó a través del conector de barril, la temperatura del conector subió de forma significativa, alcanzando aproximadamente 45–46 °C. El resto de la placa se mantuvo relativamente fría (alrededor de 34 °C), lo que confirma que el propio conector es el principal cuello de botella térmico en esta configuración. Aunque la electrónica de la placa gestionó bien la carga, el calentamiento del conector se hace más acusado a corrientes más altas.
En cambio, al usar las bornas de tornillo, la temperatura del MOSFET subió de forma acusada, alcanzando aproximadamente 78–80 °C, cerca de los límites superiores especificados en las hojas de datos típicas, donde la temperatura elevada puede empezar a afectar a las características del componente y a la fiabilidad a largo plazo. Los cables de las bornas también se calentaron de forma apreciable con esta carga.
Otra limitación práctica es el tamaño de las bornas de tornillo, que restringe el uso de cables más gruesos y contribuye al calentamiento debido a la mayor resistencia del cableado.
En conjunto, a 7 A el sistema se aproxima a sus límites térmicos: el conector de barril está condicionado por el calentamiento del conector, mientras que la ruta por borna de tornillo está limitada por la disipación del MOSFET y las restricciones del cableado.
10 A durante 30 segundos
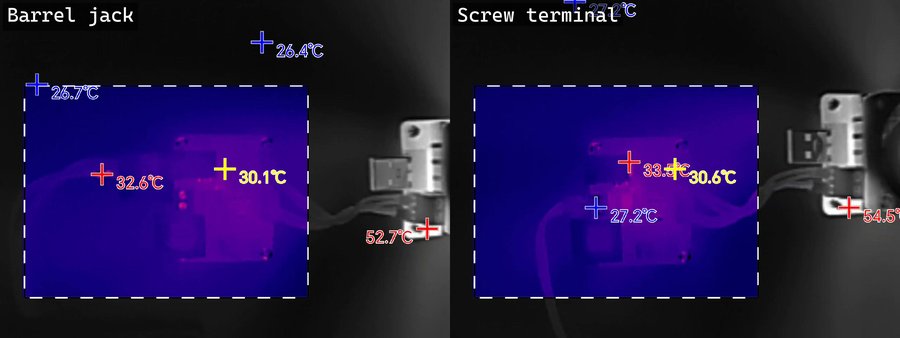
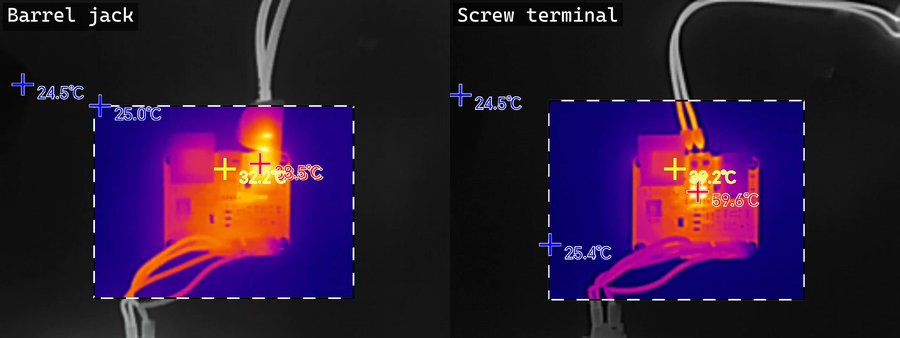
Imágenes térmicas en paralelo al final de la prueba de 10 A / 30 s. Conector de barril (izquierda): pico de 37,9 °C. Borna de tornillo (derecha): 115,6 °C en el MOSFET, muy por encima de los límites seguros de funcionamiento.
Izquierda: conector de barril. Derecha: borna de tornillo.
La prueba de 10 A (30 segundos) representa una condición extrema y supera claramente el rango de funcionamiento cómodo de la placa, revelando sus límites de fallo.
Cuando se alimentó a través del conector de barril, el principal problema se desplazó al cableado. Los cables de motor se calentaron de forma apreciable con esta carga, mientras que la propia placa se mantuvo relativamente al margen. La zona del conector también mostró temperaturas elevadas (40–45 °C), pero no se observaron puntos calientes críticos en la PCB. En esta configuración, el cableado externo se convierte en el factor limitante antes que la propia placa.
En cambio, la ruta por borna de tornillo mostró un estrés térmico grave en el MOSFET. Su temperatura superó rápidamente los límites seguros de funcionamiento, alcanzando muy por encima de los 100 °C (≈120 °C en esta prueba). A este nivel, el dispositivo funciona muy por encima de las condiciones recomendadas, donde pueden producirse degradación del rendimiento, fuga térmica o daños permanentes.
En conjunto, los resultados confirman que el funcionamiento a 10 A no es sostenible, sobre todo al usar la entrada por borna de tornillo. El MOSFET se convierte en el punto débil crítico, mientras que en la configuración por conector de barril la limitación se desplaza a los conectores y al cableado, en lugar de a la propia PCB.
Conclusión
La Waveshare Serial Bus Servo Driver Board funciona bien en condiciones de uso típicas y con cargas moderadas. A 2 A e incluso a 5 A de carga continua, la placa se mantiene estable y con un buen comportamiento térmico, lo que la hace adecuada para la mayoría de las aplicaciones de robótica estándar.
Sin embargo, la elección de la entrada de alimentación influye de forma significativa en el rendimiento. El conector de barril proporciona una ruta de alimentación más directa y eficiente, cuya principal limitación es el calentamiento del conector y del cableado a corrientes más altas. En cambio, la entrada por borna de tornillo introduce un MOSFET en la ruta de alimentación, que se convierte en la principal fuente de calor y en un claro cuello de botella bajo carga.
A corrientes más altas (7 A en adelante), ambas configuraciones empiezan a acercarse a sus límites térmicos. El conector de barril está condicionado por el calentamiento del conector, mientras que la ruta por borna de tornillo está limitada por la disipación del MOSFET y las restricciones del cableado. En condiciones extremas (10 A), la placa funciona fuera de sus límites seguros, sobre todo al usar las bornas de tornillo, donde la temperatura del MOSFET supera los rangos seguros de funcionamiento.
Otra cuestión de fiabilidad es el diodo TVS presente en las placas de la revisión 1.1. Varias placas fallaron durante las pruebas, muy probablemente debido a inestabilidad de la alimentación o a condiciones transitorias. En estos casos, el diodo TVS parecía fallar (quemarse), inutilizando de hecho la placa. Aunque retirar el diodo averiado puede restablecer la funcionalidad, este comportamiento sugiere que el circuito de protección puede ser demasiado sensible —o no lo bastante robusto— para entornos de alimentación inestables.
En términos prácticos, la placa es muy adecuada para sistemas que funcionan hasta ~5 A de carga continua, con picos cortos ocasionales. Para cargas más altas, hay que prestar especial atención a la calidad de la alimentación, al cableado y a la elección de conectores. Siempre que sea posible, la entrada por conector de barril es la opción preferible para aplicaciones de mayor corriente, mientras que las bornas de tornillo son más adecuadas para montajes de menor corriente u orientados a la comodidad.
En conjunto, la placa ofrece un buen equilibrio entre funcionalidad y coste, pero su capacidad de potencia y su robustez están limitadas por el diseño de los conectores, la implementación de la ruta de alimentación y la sensibilidad a los transitorios de la alimentación.
Waveshare Serial Bus Driver HAT
- Documentación: https://www.waveshare.com/wiki/Bus_Servo_Driver_HAT_(A)
- Esquema: Esquema del Bus Servo Driver HAT (A)/Bus_Servo_Driver_HAT_(A)_Sch.pdf)
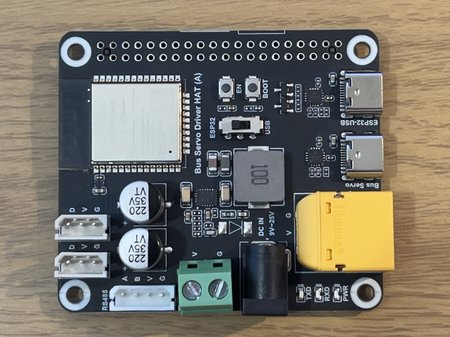
Anverso del Waveshare Driver HAT: microcontrolador ESP32, etapa de salida RS485 / TTL y tres entradas de alimentación (conector de barril de 5,5×2,5 mm, bornas de tornillo, XT90). |
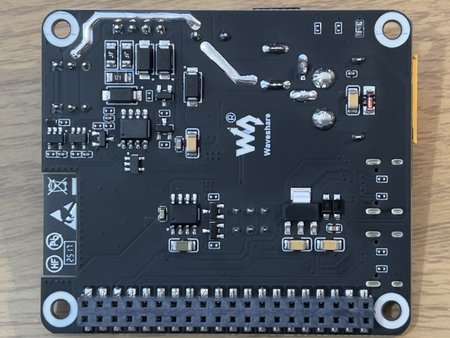
Cara inferior del Driver HAT que muestra el conector de 40 pines para Raspberry Pi y el regulador de 5 V integrado que alimenta la Pi. |
Driver HAT, anverso (izquierda) y reverso (derecha).
La Waveshare Serial Bus Servo Driver HAT es una solución más avanzada y orientada a mayor potencia en comparación con la placa adaptadora más sencilla. Integra un microcontrolador ESP32, lo que le permite funcionar como controlador autónomo con capacidades de comunicación tanto cableada como inalámbrica (Wi-Fi / Bluetooth). La placa está diseñada como un HAT de Raspberry Pi, lo que permite la conexión directa mediante el conector de 40 pines a la vez que alimenta la Pi a través de un regulador de 5 V integrado. Admite interfaces de servo TTL y RS485, lo que la hace compatible con una gama más amplia de servos de bus serie. Desde el punto de vista de la alimentación, la placa ofrece opciones de entrada considerablemente más robustas, incluyendo un conector XT90 y un amplio rango de entrada de 9–25 V.
Conectores de alimentación
La placa ofrece varias opciones de entrada de alimentación: un conector de barril de 5,5×2,5 mm, bornas de tornillo más grandes (en comparación con la placa anterior) y un conector XT90 para aplicaciones de alta corriente. Todos estos conectores están unidos al mismo bus de alimentación, sin componentes adicionales —como MOSFET— introducidos en la ruta de alimentación. Esto se traduce en una conexión directa y de baja resistencia a la carga, lo que resulta beneficioso para manejar corrientes más altas.

Las tres entradas de alimentación alimentan un único bus de alimentación de baja resistencia sin ningún MOSFET en la ruta; las bornas de tornillo más grandes y el conector XT90 admiten cables más gruesos para aplicaciones de mayor corriente.
Las bornas de tornillo más grandes y el conector XT90 hacen que esta placa sea más adecuada para cables más gruesos y para suministrar mayor corriente en comparación con los conectores más pequeños empleados en la placa anterior.
La PCB dispone de una huella reservada para un diodo TVS, pero el diodo en sí no está montado: la protección contra transitorios se contempló en el diseño, pero no se incluye en esta placa.
La PCB incluye una huella para un diodo TVS, pero el diodo en sí no está montado, lo que sugiere que la protección contra transitorios se contempló en el diseño pero no se implementa en la versión que se comercializa.
Pruebas de carga
Todas las pruebas se realizaron usando la entrada por conector de barril, ya que todos los conectores de alimentación comparten la misma ruta de alimentación y no hay diferencia funcional entre ellos.
Carga de 2 A durante 10 minutos
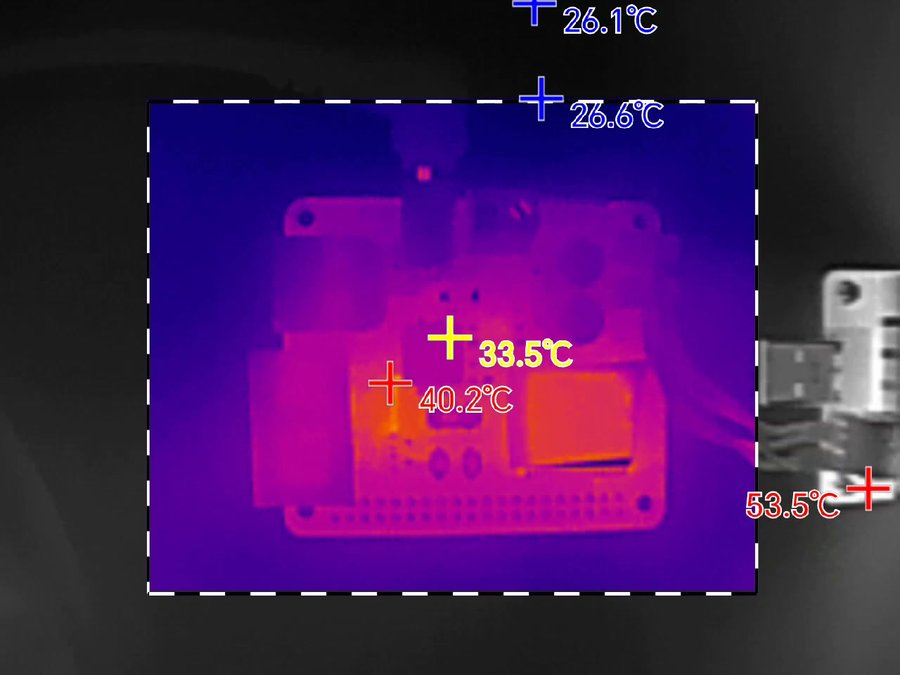
Imagen térmica al final de la prueba a 2 A / 10 min. Solo el módulo ESP32 y el regulador de 5 V integrado muestran algún calentamiento (~33–40 °C); la ruta de alimentación se mantiene fría.
La prueba de carga de 2 A (10 minutos) no presentó problemas térmicos. La temperatura general de la placa se mantuvo cerca de la ambiente, observándose solo un calentamiento menor.
Los únicos componentes que mostraron un aumento de temperatura apreciable fueron el módulo ESP32 y el regulador de tensión integrado, alcanzando alrededor de 33–40 °C. Esto es de esperar, ya que ambos participan activamente en la regulación y el control de la alimentación. No se observó un calentamiento significativo en la ruta de alimentación ni en los conectores, lo que indica un funcionamiento eficiente en condiciones de carga típicas.
Carga de 5 A durante 5 minutos
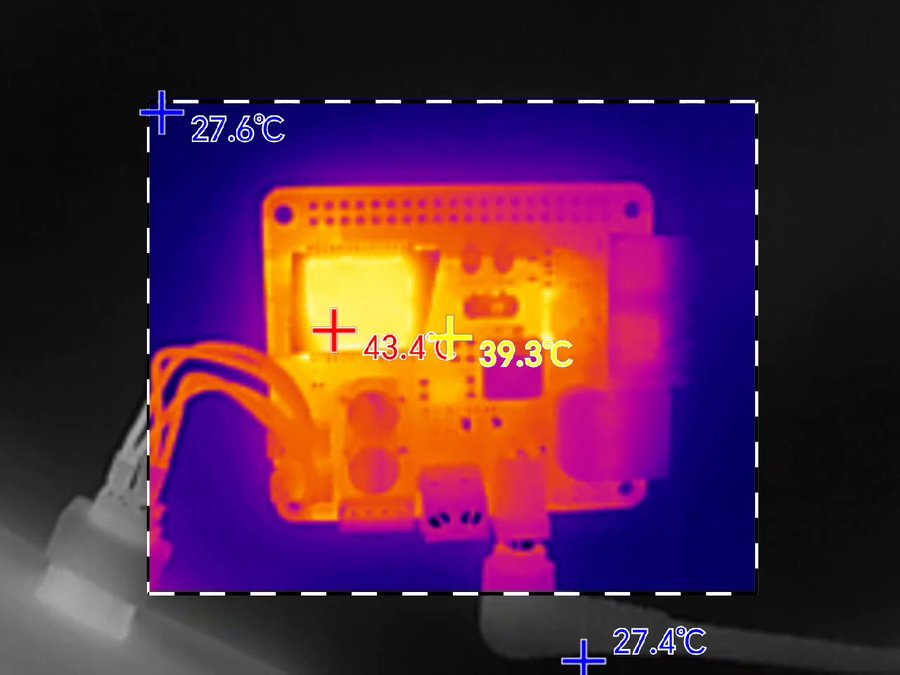
Imagen térmica al final de la prueba a 5 A / 5 min. El comportamiento es prácticamente idéntico al caso de 2 A: el ESP32 y el regulador ligeramente templados, y el bus de alimentación y los conectores cerca de la temperatura ambiente.
La prueba de carga de 5 A (5 minutos) mostró un comportamiento similar al caso de 2 A, sin observarse problemas térmicos significativos. La temperatura general de la placa aumentó ligeramente, pero se mantuvo holgadamente dentro de los límites seguros. Las principales fuentes de calor fueron de nuevo el módulo ESP32 y el regulador de tensión integrado. La ruta de entrada de alimentación y los conectores se mantuvieron relativamente fríos, lo que indica bajas pérdidas y un manejo eficiente de la corriente.
En conjunto, la placa soporta una carga continua de 5 A sin signos de estrés térmico, lo que sugiere que es adecuada para un funcionamiento sostenido bajo carga alta en casos de uso típicos.
Carga de 7 A durante 2 minutos
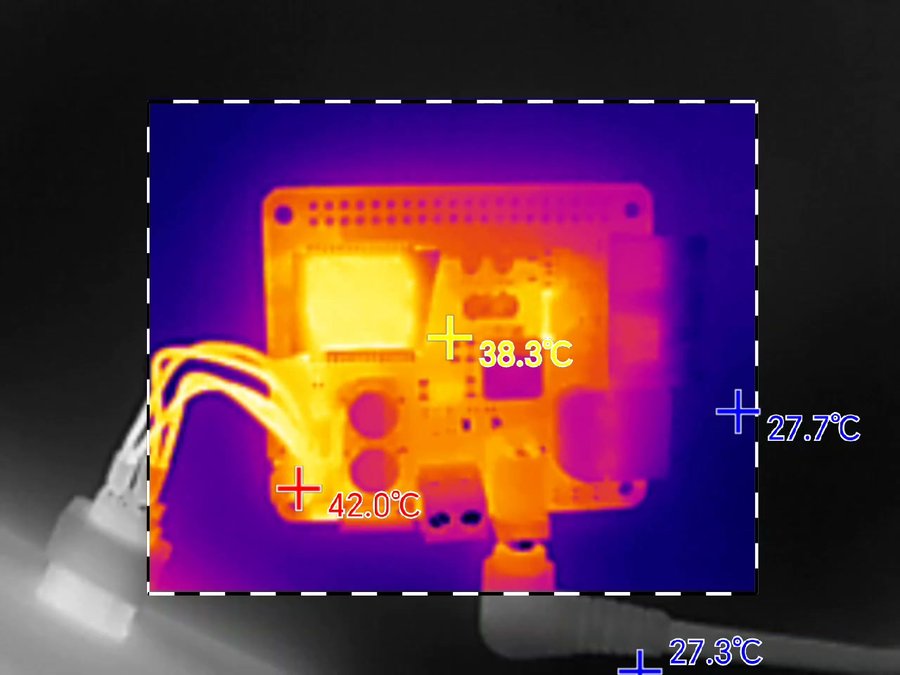
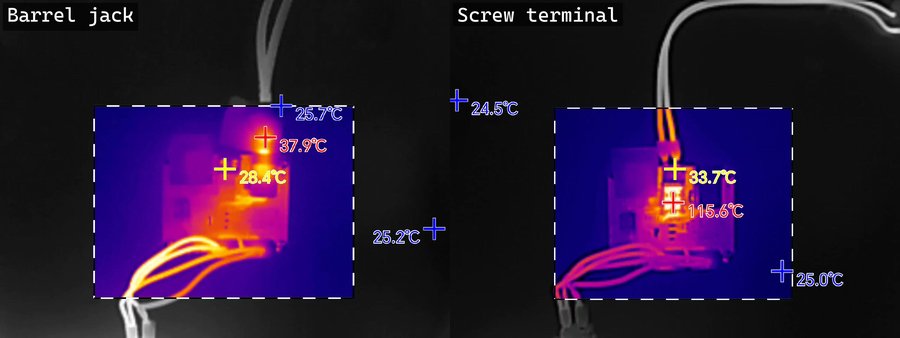
Imagen térmica al final de la prueba a 7 A / 2 min. Todos los componentes de la placa permanecen dentro del rango seguro; el único calentamiento reseñable es el de los cables de motor (~42 °C).
La prueba de carga de 7 A (2 minutos) mostró que todos los componentes de la placa se mantuvieron dentro de un rango de temperatura seguro. Los cables de motor se calentaron ligeramente, alcanzando aproximadamente 42,2 °C.
10 A durante 30 segundos
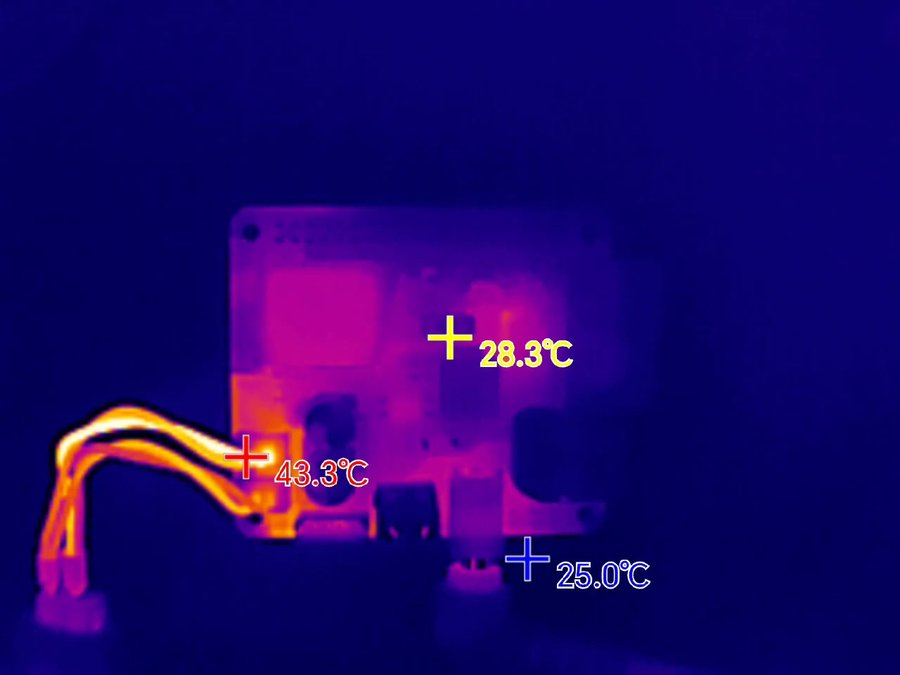
Imagen térmica al final de la prueba a 10 A / 30 s. La propia placa se mantiene fría: el único calentamiento apreciable está en los cables de motor, a ~44,6 °C.
Durante la prueba de carga de 10 A (30 segundos), todos los componentes de la placa se mantuvieron dentro de temperaturas seguras de funcionamiento. El único calentamiento apreciable estuvo en los cables de motor, que alcanzaron aproximadamente 44,6 °C.
Conclusión
La Waveshare Serial Bus Driver HAT está claramente diseñada pensando en aplicaciones de mayor corriente y rinde considerablemente mejor bajo carga en comparación con las placas adaptadoras más sencillas. En todas las pruebas —de 2 A hasta 10 A—, la propia placa se mantuvo térmicamente estable, sin observarse puntos calientes críticos en la ruta de alimentación ni en la circuitería de control.
Gracias a su diseño de bus de alimentación directo (sin componentes adicionales como MOSFET), la placa maneja con eficiencia las corrientes altas, y sus conectores más grandes la hacen muy adecuada para un suministro de potencia robusto.
En la práctica, los factores limitantes no son la propia placa, sino los componentes externos: en concreto, los conectores de motor y el cableado de serie. A medida que aumenta la corriente, el calentamiento se observa principalmente en los cables y no en la PCB, lo que indica que la placa tiene margen suficiente, mientras que el cableado se convierte en el cuello de botella.
En conjunto, el HAT es una opción sólida para sistemas con varios servos y montajes de alta corriente. Puede gestionar cómodamente cargas sostenidas en el rango de 5–7 A y tolerar picos cortos de hasta 10 A, siempre que se utilicen el cableado y los conectores adecuados.
Inicia sesión para dejar un comentario.